单输入单输出系统仿真
系统仿真复习题
(0-10)
n
m
∑ ∑ 上式也可以表示为: c(k) = − aic(k − i) + bjr(k − j) (0-11)
i =1
j=0
式中, ai (i=1,2, …,n)和 bj (j=1,2, …,m)对线性定常离散系统为常系数,m≤n。式
(0-11)称为n阶线性常系数差分方程。 b) 离散传递函数
系统仿真复习题:
1、 模型的定义和分类:
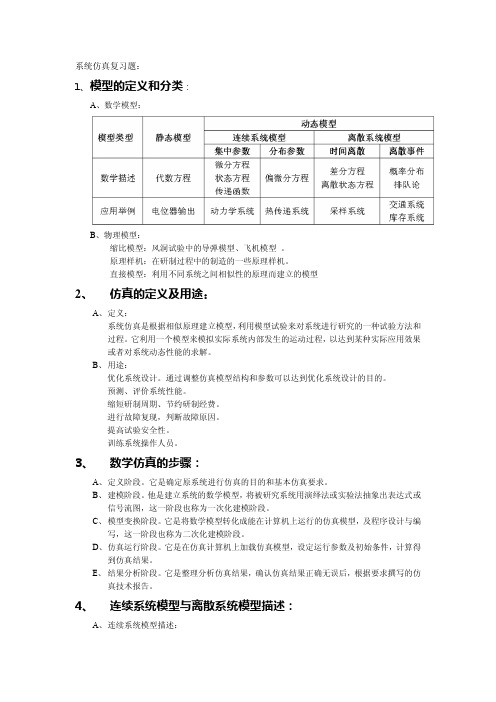
A、数学模型:
B、物理模型: 缩比模型:风洞试验中的导弹模型、飞机模型 。 原理样机:在研制过程中的制造的一些原理样机。 直接模型:利用不同系统之间相似性的原理而建立的模型
2、 仿真的定义及用途:
A、 定义: 系统仿真是根据相似原理建立模型,利用模型试验来对系统进行研究的一种试验方法和 过程。它利用一个模型来模拟实际系统内部发生的运动过程,以达到某种实际应用效果 或者对系统动态性能的求解。
⎥ ⎥⎦
⎢⎢⎣dq1 dq2 L
d1p ⎤
⎡ u1 ⎤
d2 L
p
⎥ ⎥ ⎥
,
u
=
⎢ ⎢
u2
⎥ ⎥
⎢ M⎥
dqp
⎥ ⎥⎦
⎢⎢⎣u
p
⎥ ⎥⎦
其中输出矩阵 C 为(q×n)矩阵,前馈矩阵 D 为(q×p)矩阵。
4、 权函数
一个连续系统在零初始条件下,受到一个理想脉冲函数 δ(t)的作用,其响应称为该系统的权
+ bm z−m + an z−n
(0-13)
c) 权序列模型
对线性定常系统,如果输入为单位序列:
r
(nT
)
=
δ
(nT
)
mimo 仿真
MIMO系统的Matlab仿真报告一、原理及理论基础1.BPSK:把模拟信号转换成数据值的转换方式之一。
是利用偏离相位的复数波浪组合来表现信息键控移相方式的一种。
BPSK使用了基准的正弦波和相位反转的波浪,使一方为0,另一方为1,从而可以同时传送接受2值(1比特)的信息。
2.QPSK: 四相相移调制,和BPSK调制差不多,只不过它有4种相位.将360度分成4分。
各个相位角相差90度所以又称正交相移调制。
常用的初始相位角可以是0或者45度。
一般QPSK可以看成正交的两路传播,一路I支路,一路为Q 支路。
QPSK调制效率高,传输的频带利用率高,要求传送途径的信噪比较低。
3. Rayleigh信道:是一种无线电信号传播环境的统计模型。
这种模型假设信号通过无线信道之后,其信号幅度是随机的,即“衰落”,并且其包络服从瑞利分布。
这一信道模型能够描述由电离层和对流层反射的短波信道,以及建筑物密集的城市环境。
瑞利衰落只适用于从发射机到接收机不存在直射信号的情况,否则应使用莱斯衰落信道作为信道模型。
4. MIMO:是一种用来描述多天线无线通信系统的抽象数学模型,能利用发射端的多个天线各自独立发送信号,同时在接收端用多个天线接收并恢复原信息。
该技术最早是由马可尼于1908年提出的,他利用多天线来抑制信道衰落(fading)。
根据收发两端天线数量,相对于普通的单输入单输出系统(Single-Input Single-Output,SISO),MIMO此类多天线技术尚包含早期所谓的“智能型天线”,亦即单输入多输出系统(Single-Input Multi-Output,SIMO)和多输入单输出系统(Multiple-Input Single-Output,MISO)。
由于MIMO可以在不需要增加带宽或总发送功率耗损(transmit power expenditure)的情况下大幅地增加系统的数据吞吐量(throughput)及传送距离,使得此技术于近几年受到许多瞩目。
《液压与气压传动技术》项目9液压仿真软件Fluidsim精选全文

• 在“选项”菜单下,执行“仿真”命令,用户可以定义颜色与状态值 之间的匹配关系,暗红色管路的颜色浓度与压力相对应,其与最大压 力有关,FluidSIM软件能够区别三种管路颜色浓度颜色浓度与压力关 系见表9. 3。
上一页 下一页 返回
任务2 Fluidsim仿真软件Байду номын сангаас
• 3新建回路图 • 通过单击按钮 或在“文件”,菜单下,执行“新建’,命令,新
建空白绘图区域,以打开一个新窗口如图9. 6所示。只能在编辑模式 下新建或修改回路图,每个新建绘图区域都自动含有一个文件名,且 可按该文件名进行保存。这个文件名显示在新窗口标题栏上。通过元 件库右边的滚动条,用户可以浏览元件。利用鼠标用户可以从元件库 中将元件“拖动”和“放置”在绘图区域上:将鼠标指针移动到元件 库中的元件上,这里将鼠标指针移动到液压缸上,按下鼠标左键。在 保持鼠标左键期间,移动鼠标指针。则液压缸被选中,鼠标指针由箭 头变为小 ,元件外形随鼠标指针移动而移动。将鼠标指针移动到 绘图区域,释放鼠标左键,则液压缸就被拖置绘图区域里如图9. 7所 示,采用这种方法,可以从元件库中“拖动”每个元件,并将其放到 绘图区域中的期望位置上。按同样方法,也可以重新布置绘图区域中 的元件。
控制系统的Simulink仿真
06 结论与展望
结论
控制系统Simulink仿真是一种有 效的工具,可用于模拟和分析各 种控制系统的性能。通过使用 Simulink,研究人员和工程师可 以轻松地构建和修改控制系统模 型,并使用各种仿真工具进行系 统分析和优化。
Simulink提供了广泛的模块库和 工具,可用于构建各种类型的控 制系统模型,包括线性、非线性、 离散和连续系统。这些模块可以 方便地组合和修改,以适应特定 的控制系统需求。
非线性系统仿真
总结词
对非线性系统的动态行为进行模拟的过程。
详细描述
非线性系统在Simulink中可以通过使用非线性模块进行模拟。非线性系统是指系统的 输出与输入不成比例的系统,例如某些电子设备或机械系统。在Simulink中,可以使 用非线性模块来模拟这些系统的行为,例如非线性增益、饱和等。通过调整模块参数,
• 未来,Simulink可能会引入更多先进的仿真技术和算法,以提高仿真精度和 效率。例如,基于模型的控制设计、自适应控制、预测控制等先进控制算法可 能会被集成到Simulink中,以提供更强大的分析和优化工具。
• 此外,随着物联网和智能制造等领域的快速发展,Simulink可能会扩展其模 块库和工具箱,以支持这些领域的控制系统建模和仿真。例如,增加与传感器 、执行器和其他智能设备的接口模块,以及支持实时仿真和嵌入式系统开发的 工具箱。
保障生产安全
控制系统能够及时检测和预防潜在的安全隐患, 降低事故发生的可能性。
3
节能减排
优化控制参数,降低能耗和排放,符合绿色环保 要求。
控制系统的发展历程
01
02
03
模拟控制系统
《自动控制系统计算机仿真》习题参考答案
《自动控制系统计算机仿真》习题参考答案1-1 什么是仿真? 它的主要优点是什么?它所遵循的基本原则是什么?答:所谓仿真,就是使用其它相似的系统来模仿真实的需要研究的系统。
计算机仿真是指以数字计算机为主要工具,编写并且运行反映真实系统运行状况的程序。
对计算机输出的信息进行分析和研究,从而对实际系统运行状态和演化规律进行综合评估与预测。
它是非常重要的设计自动控制系统或者评价系统性能和功能的一种技术手段。
仿真的主要优点是:方便快捷、成本低廉、工作效率和计算精度都很高。
它所遵循的基本原则是相似性原理。
1-2 你认为计算机仿真的发展方向是什么?答:向模型更加准确的方向发展,向虚拟现实技术,以及高技术智能化、一体化方向发展。
向更加广阔的时空发展。
1-3 计算机数字仿真包括哪些要素?它们的关系如何?答:计算机仿真的三要素是:系统——研究的对象、模型——系统的抽象、计算机——仿真的工具和手段。
它们的关系是相互依存。
2-1 控制算法的步长应该如何选择?答:控制算法步长的选择应该恰当。
如果步长太小,就会增加迭代次数,增加计算量;如果步长太大,计算误差将显著增加,甚至造成计算结果失真。
2-2 通常控制系统的建模有哪几种方法?答:1)机理建模法;2)实验建模法;3)综合建模法。
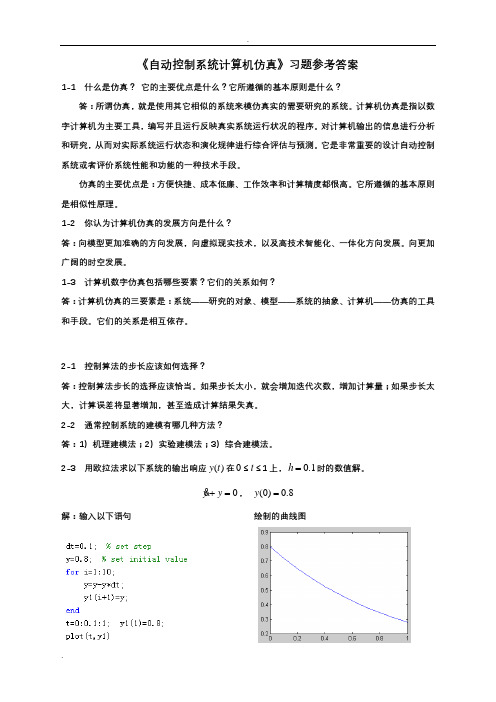
2-3 用欧拉法求以下系统的输出响应()y t 在0≤t ≤1上,0.1h =时的数值解。
0y y +=, (0)0.8y =解:输入以下语句 绘制的曲线图2-4 用二阶龙格-库塔法对2-3题求数值解,并且比较两种方法的结果。
解:输入以下语句绘制的曲线图经过比较两种方法的结果,发现它们几乎没有什么差别。
3-1 编写两个m文件,分别使用for和while循环语句计算20031kk=∑。
解:第1个m文件,第2个m文件运行结果都是3-2 求解以下线性代数方程:123102211313121xxx⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦解:输入语句计算结果3-3 已知矩阵013=121542⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦A,218=414332⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦B试分别求出A阵和B阵的秩、转置、行列式、逆矩阵以及特征值。
利用Matlab仿真平台设计单闭环直流调速系统
大连工业大学课程设计(论文)任务书指导教师签字:系(教研室)主任签字:2014年12月1日目录一、摘要 (3)二、总体方案设计 (4)1、控制原理2、控制结构图三、参数计算 (6)1、静态参数设计计算2、动态参数设计计算四、稳定性分析 (9)1、基于经典自控理论得分析2、利用MATLAB辅助分析A、利用根轨迹分析B、在频域内分析奈氏曲线:bode图利用单输入单输出仿真工具箱分析用Simulink仿真五、系统校正 (15)1、系统校正的工具2、调节器的选择3、校正环节的设计4、限流装置的选择六、系统验证 (19)1、分析系统的各项指标2、单位阶跃响应3、Simulink仿真系统验证系统运行情况七、心得体会 (21)八、参考文献 (21)一、摘要运动控制课是后续于自动控制原理课的课程,是更加接近本专业实现应用的一门课程。
直流电动机具有良好的起、制动性能,宜于在大范围内平滑调速,在许多需要调速和快速正反向的电力拖动领域中得到了广泛的应用。
由于直流拖动控制系统在理论上和实践上都比较成熟,而且从控制的角度来看,它又是交流拖动控制系统的基础。
所以加深直流电机控制原理理解有很重要的意义。
本设计首先进行总体系统设计,然后确定各个参数,当明确了系统传函之后,再进行稳定性分析,在稳定的基础上,进行整定以达到设计要求。
另外,设计过程中还要以matlab为工具,以求简明直观而方便快捷的设计过程。
二、总体方案设计1、控制原理根据设计要求,所设计的系统应为单闭环直流调速系统,选定转速为反馈量,采用变电压调节方式,实现对直流电机的无极平滑调速。
所以,设计如下的原理图:图1、单闭环直流调速系统原理图转速用与电动机同轴相连的测速电机产生的正比于转速的电压信号反馈到输入端,再与给定值比较,经放大环节产生控制电压,再通过电力电子变换器来调节电机回路电流,达到控制电机转速的目的。
这里,电压放大环节采用集成电路运算放大器实现,主电路用晶闸管可控整流器调节对电机的电源供给。
SISO
学号天津城建大学电子系统综合设计设计说明书基于matlab的单输入单输出信道模型仿真起止日期:2013 年12 月23 日至2014 年1 月17 日学生姓名班级电信1班成绩指导教师(签字)计算机与信息工程学院2014年1月17日天津城建大学课程设计任务书2013 —2014学年第一学期计算机与信息工程学院电子信息工程专业 1 班级课程设计名称:电子系统综合设计设计题目基于matlab的单输入单输出信道模型仿真完成期限:自2013 年12 月23 日至2014 年 1 月17 日共 4 周设计依据、要求及主要内容:1、设计依据:采用matlab仿真软件,实现对于宽带通信系统中双选择信道模型中,单输入单输出天线的信道模型仿真。
2、要求及主要内容:1)熟练使用matlab软件;2)理解信道模型仿真,在整个通信系统设计中的重要性;3)采用单输入单输出的信道模型;4)通过改变不同的障碍物,得到不同的信道模型。
5)并对不同模型进行比较指导教师(签字):系主任(签字):批准日期:2013 年12月19 日目录第一章基本原理和设计思路 (1)1.1 OFDM (1)1.2 信道模型 (1)1.2.1 加性高斯白噪声信道 (1)1.2.2 瑞利多路径衰落信道 (2)1.2.3稀疏信道 (2)1.3 信道容量 (3)1.4 算法-傅里叶变换 (3)1.5 设计思路 (4)第二章设计实现 (5)2.1 Matlab简介 (5)2.2 参数设置 (5)2.2.1 输入单位脉冲信号设置 (5)2.2.2 稀疏信道参数设计 (5)2.3 SISO仿真 (6)第三章仿真结果及分析 (7)3.1 三维立体模型图 (7)3.2 仿真结果及分析 (8)3.3 与其他信道模型的比较 (8)第四章课设总结 (9)参考文献 (10)附录:源程序 (11)第一章 基本原理和设计思路1.1 OFDMOFDM ,即正交频分复用技术,是一种多载波调制技术。
系统辨识作业及答案
一. 问答题1. 介绍系统辨识的步骤。
答:(1)先验知识和建模目的的依据;(2)实验设计;(3)结构辨识;(4)参数估计;(5)模型适用性检验。
2. 考虑单输入单输出随机系统,状态空间模型[])()(11)()(11)(0201)1(k v k x k y k u k x k x +=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=+ 转换成ARMA 模型。
答:ARMA 模型的特点是u(k)=0,[])()(11)()(0201)1(k v k x k y k x k x +=⎥⎦⎤⎢⎣⎡=+3. 设有一个五级移位寄存器,反馈取自第2级和第3级输出的模2加法和。
试说明:(1) 其输出序列是什么? (2) 是否是M 序列?(3) 它与反馈取自第4级与第3级输出模2加法和所得的序列有何不同? (4) 其逆M 序列是什么? 答:(1)设设输入序列1 1 1 1 1111018110107101006010015100114001113011112111111)()()()()()()()(()()()()()()()01110161110115110101410100)13(010011210011110011110011109()()()()()()()001112401110)23(111012211010211010020010011910011180011117()()()()()()()()10011320011131011103000111291101028101002701001261001125 其输出序列为:1 1 1 1 1 0 0 1 0 1⑵不是M 序列⑶第4级与第3级模2相加结果100108001007010006100015000114001113011112111111)()()()()()()()(()()()()()()()11110161110115110101410101)13(010111210110110110010110019()()()()()()()110012410010)23(001002201000211000120000111900111180111117()()()()()()()()01111321111031111013011010291010128010112710110260110025 不同点:第2级和第3级模二相加产生的序列,是从第4时刻开始,每隔7个时刻重复一次;第4级与第3级模2相加产生的,序列,是从第2时刻开始每隔15个时刻重复一次。