串行I2C总线E2PROM AT24CXXX的应用
IIC串行总线的工作原理及应用讲解
三、在51上用P1口模拟I2C (c语言)
/* 电平模拟函数和基本读写函数 void IIC_Start(void); void IIC_Stop(void); void SEND_0(void); void SEND_1(void); bit Check_Acknowledge(void); void Write_Byte(uchar b); bit Write_N_Bytes(uchar *buffer,uchar n); bit Read_N_Bytes(uchar SlaveAdr,uchar n,uchar *buffer); uchar Read_Byte(void); */
一、典型信号模拟 为了保证数据传送的可靠性,标准的I2C
总线的数据传送有严格的时序要求。I2C总 线的起始信号、终止信号、发送“0”及发 送“1”的模拟时序 :
I2C总线信号类型
▪ 开始信号:SCL为高电平时,SDA由高电平向低电平跳变,开 始传送数据。
▪ 结束信号:SCL为低电平时,SDA由低电平向高电平跳变,结 束传送数据。
▪在起始信号后的应答时钟脉冲仅仅是为了和总线所 使用的格式一致,并不要求器件在这个脉冲线器件的接口
一、总线数据传送的模拟
主机可以采用不带I2C总线接口的单片机,如 80C51、AT89C2051等单片机,利用软件实现I2C 总线的数据传送,即软件与硬件结合的信号模拟。
引导过程由起始信号、起始字节、应答位、 重复起始信号(Sr)组成。
▪请求访问总线的主机发出起始信号后,发送起始字 节(0000 0001),另一个单片机可以用一个比较低 的速率采样SDA线,直到检测到起始字节中的7个 “0”中的一个为止。在检测到SDA线上的高电平后, 单片机就可以用较高的采样速率,以便寻找作为同 步信号使用的第二个起始信号Sr。
I2C总线at24c02芯片使用说明
3.2.5 密码储存电路密码储存电路采用I2C总线at24c02存储芯片存放密码,可实现断电密码不消失,at24c02存储芯片可长期存储信息,可上百万次以上重新擦写。
图3-5 密码储存电路2.4.3 I2C总线密码存储芯片at24c02介绍图2-3 at24c02引脚图(1)引脚功能介绍及相关知识WP:写保护引脚,将该引脚接VCC E2PR0MI就实现写保护(只读)。
引脚接地或悬空,可以对器件进行读写操作。
SCL串行时钟引脚,串行输入输出时该引脚用于输入时钟。
SDA串行数据输入输出引脚,用来输入输出数据,该引脚为射极开路输出,需接上拉电阻。
(2)I2C总线协议只有总线非忙时才被允许进行数据传送,在传送时,当时钟线为高电平,数据线必须为固定状态,不允许有跳变。
时钟线为高电平时数据线的任何电平变化将被当作总线的启动或停止条件。
(3)起始条件起始调教必须在所有操作命令之前发送。
时钟线保持高电平期间,数据线电平从高到低跳变作为I2C总线的启动信号。
CAT24Cxx>一直监视SDA和SCL电平信号,直到条件满足时才响应。
(4)停止条件时钟线保持高电平期间,数据线电平从低到高跳变作为IC总线的停止信号。
(5)器件地址的约定主器件在发送启动命令后开始传送数据,主器件发送相应的从器件地址,8 位从器件地址的高四位固定为1010,接下来的 3 位用来定义存储器的地址,对2于,这三位无意义,对于,接下来的 2 位无意义,第三位是地址高位,中,第一位无意义,后两位表示地址高位。
最后一位为读写控制位,“1表”示对从器件进行读写操作,“0表”示写操作。
在主器件发送启动命令和一字节从器件地址后,如果与从器件地址吻合,CAT24C02各发送一个应答信号,然后再根据读/写控制为进行读或写操作。
(6)应答信号每次数据传送成功后,接收器件将发送一个应答信号。
当第九个时钟信号产生时,产生应答型号的器件将SDA下拉为低,通知已经接受到8位数据,接收到起始条件和从器件地址后,CAT24C02发送一个应答信号,如果为写操作,每接收到一个字节数据,CAT24C02发送一个应答信号。
实验三 I2C总线串行E2PROM 24C02A实验

实验三I2C总线串行E2PROM 24C02A实验一、实验目的与要求了解I2C总线读写方式;掌握I2C总线的读写操作和对24C02A进行数据读写二、实验设备STAR系列实验仪一套、PC机一台。
三、实验内容1、24C02A:(1) 24C02是I2C总线(二线串行接口)的串行EEPROM,容量4K Bit。
(2)分为字节写和页写(8字节)模式,可以单字节读取或连续读出数据。
2.实验过程(1)写满24C02A内部整个4K bit串行EEPROM,然后检验写入数据是否正确并显示结果,正确;点亮8个红色发光管(G6区),错误;熄灭8个红色发光管(2)起始写入地址为OOH,起始写入数据为OOH,之后地址与数据都以+l递增,直到写满整个EEPROM四、实验原理图五、实验步骤1、主机连线说明;;E4区;SDA —l A3区;P3.2(INTO)iE4区;SCL 一;A3区;P3.3(INTl)!G6区;JP65 一A3区;JP51 (Pl)2、运行程序;向24C02A写入数据,然后读出数据检验,检验正确,8个发光管(G6区)全亮;检验错误,8个发光管(G6医)全灭六、演示程序(完整程序见目录24C02A);l、24C02A子程序(24C02A. ASM)SDA BIT P3.2 ;数据传输口SCL BIT P3.3 ;时钟;24C02的片选地址;100HA24C02_WRITE EQU OA8H ;写指令A24C02_READ EQU OA9H ;读指令;初始化A24C02_INIT;SETB SCL ;将SCL,SDA置位,释放IIC总线SETB SDARET;写操作,分字节写和页写模式;字节写,一次写入一个字节数据,A-写入地址,B-数据Write_Byte;PUSH ACC ;A中地址压栈MOV A,#A24C02_WRITE ;写操作指令LCALL Start ;开始信号LCALL Write_8bits ;写入8位数据LCALL Acknowledge ;查询接收端应答信号POP ACC ;写入A中地址LCALL Write_8bitsLCALL AcknowledgeMOV A,B ;写入B中数据LCALL Write_8bitsLCALL AcknowledgeLCALL Stop ;结束信号LCALL AckPolling ;等待写操作完成RET;页写,一次写入8个字节数据,A中存放起始写入地址,RO中存放数据首地址Write_Page: PUSH 07HMOV R7, #8PUSH ACC ;A中地址压栈MOV A,#A24C02_WRITE ;写操作指令LCALL Start ;开始信号LCALL Write_8bits ;写入8位数据LCALL Acknowledge ;查询接收端应答倍号POP ACC ;写入A中地址LCALL Write_8bitsLCALL AcknowledgePUSH ACCWrite_Page_l: MOV A,@R0 ;缓存区数据逐一写入LCALL Write_8bitsLCALL AcknowledgeINC RODJNZ R7, Write_Page_l ;写8次LCALL Stop ;结束信号CLR ALCALL AckPolling ;等待写操作完成POP ACCPOP 07HRET;等待写操作完成AckPolling;MOV A,#A24C02_Write ;写操作指令LCALL Start ;开始信号LCALL Write_8bitsSETB SDA ;从机应答SETB SCL ;应答占用一个脉冲LCALL Delay_Time'JB SDA,AckPolling ;接收端应答标志;将SDA置低CLR SCLLCALL Stop ;停止信号RET;读操作,分为字节读和连续读取操作;字节读,一次读取一个字节,A一读取地址Read_Byte;PUSH ACC ;A中地址压栈LCALL Start ;开始信号MOV A,#A24C02_ Write ;写操作指令LCALL Write_8bitsLCALL AcknowledgePOP ACC 写入A中地址LCALL Write_8bitsLCALL Acknowledge;立即读,读取当前内部地址的数据,一个字节Read_Current;LCALL Start ;开始信号,下面读取数据MOV A,#A24C02_Read ;读操作指令LCALL Write_8bitsLCALL AcknowledgeLCALL Read_8bits 读取数据,放在A中LCALL Stop ;停止信号RET;连续读取n个教据,A-读取首地址,B一存放读取数据个数;RO-缓冲区Read_Sequence: , PUSH 07HPUSH ACCDEC BMOV R7,B ;B中存放读取数据个数LCALL Start ;开始信号MOV A,#A24C02_Write ;写操作指令LCALL Write_8bitsLCALL AcknowledgePOP ACCLCALL Write_8bitsLCALL AcknowledgeLCALL Start ;开始信号,下面读取数据MOV A,#A24C02_Read ;读操作指令LCALL Write_8bitsLCALL AcknowledgeRead_Sequence_l: LCALL Read_8bitsLCALL MasterACKMOV @R0,A ;将数据存到RO指向的RAM中INC RODJNZ R7, Read_Sequence_lLCALL Read_8bits ;最后一次读无应答MOV @R0, ALCALL Stop ;停止信号POP 07HRead_Sequence_2;RET;写入8位数据Write_8bits: PUSH 07HMOV R7, #8Write_8bits_l: RLC ACLR SCL;数据在SCL为低时SDA上的数据可以改变,此时送上欲写数据LCALL Delay_Time ;延时MOV SDA,CSETB SCLLCALL Delay_TimeDJNZ R7, Write_8bit s_lCLR SCLPOP 07HRET;读取8位数据Read_8bits: PUSH 07HMOV R7, #8Read_8bits_l: CLR SCLLCALL Delay_TimeSETB SCL ;高电平读出数据MOV C.SDARLC ADJNZ R7, Read_8bit s_lCLR SCLPOP 07HRET;开始信号Start: SETB SDA;I2C总线操作开始信号;SCL为高时,SDA由高一>低SETB SCLLCALL Delay_TimeCLR SDALCALL Delay_TimeRET;结束信号Stop:CLR SDA;I2C总线操作结束信号;SCL为高时,SDA由低一>高SETB SCLLCALL Delay_TimeSETB SDA 结束操作,将SCL、SDA置高,释放总线LCALL Delay_TimeRET;应答查询;从机应答Acknowledge:SETB SDA ;从机应答SETB SCL ;应答占用一个脉冲LCALL Delay_TimeJB SDA,$ ;接收端应答标志;将SDA置低CLR SCLRET;主机应答MasterACK: CLR SDA ;数据线SDA清O应答SETB SCL 产生一个脉冲令从机接收到应答LCALL Delay_TimeCLR SCLSETB SDA .必须置高数据RET;延时Delay_Time;RETEND;2、主程序(MAIN. ASM);写入数据,256字节串行EEPROM顺序写入OOH-OFFHA24C02_Write:MOV R7,#32 ;32次页写,每次页写写入8个字节,共256个字节MOV R3,#OOH 写入首地址MOV R2,#VERIFYDATA ;起始写入数据A24C02_Write_l:MOV RO,#buffer ;写入数据先放在buffer (30H开始的内部RAM)A24C02_Write_2: MOV @RO, 02HINC ROINC R2CJNE RO.#buffer+8,A24C02_Write_2;一页写入8个字节MOV RO,#bufferMOV A,R3LCALL Write_PageMOV A,R3ADD A,#8MOV R3,ADJNZ R7,A24C02_Write_lRET;检验数据,读出数据与写入数据一一对应相比较,检验写入是否正确MOV R7,#OFFH ;读取整个EEPROM内的数据,256个字节MOV Rl.#bufferMOV R2,#VERIFYDATA ;数据检验MOV B,#OOH ;检验EEPROM起始数据地址A24C02_Verify_l: MOV A,BLCALL Read_Byte 读取数据XCH A.RlCJNE A,#buffer+30H,$+3 ;写入片内RAM,超过30H个字节,停止写入XCH A,RlJNC A24C02_Verify_3MOV @Rl,A ;读出的数据顺序写入片内RAM,便于检查INC RlA24C02_Verify_3: CJNE A,02H, A24C02_V erify_2INC R2INC BDJNZ R7, A24C02_Verify_lCLR FO .FO为数据检验结果标志,0-正确RETA24C02_Verify_2;SETB FO 卜检验错误RET七,实验扩展及思考题实验内容;学会使用24C02A的其余指令,如字节写入、连续读取等,进一步熟悉I2C 总线操作。
CAT2432-32Kb串行CMOSE2PROM
CAT24C32-32Kb串行CMOS E2PROM
概述
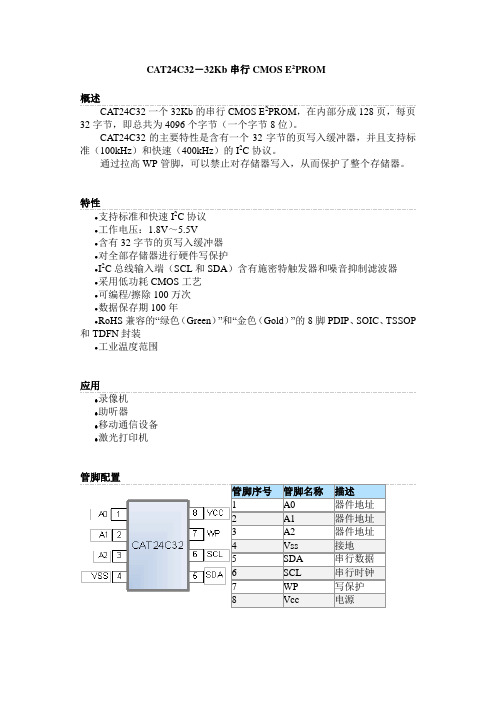
CAT24C32一个32Kb的串行CMOS E2PROM,在内部分成128页,每页32字节,即总共为4096个字节(一个字节8位)。
CAT24C32的主要特性是含有一个32字节的页写入缓冲器,并且支持标准(100kHz)和快速(400kHz)的I2C协议。
通过拉高WP管脚,可以禁止对存储器写入,从而保护了整个存储器。
特性
支持标准和快速I2C协议
工作电压:1.8V~5.5V
含有32字节的页写入缓冲器
对全部存储器进行硬件写保护
I2C总线输入端(SCL和SDA)含有施密特触发器和噪音抑制滤波器
采用低功耗CMOS工艺
可编程/擦除100万次
数据保存期100年
RoHS兼容的“绿色(Green)”和“金色(Gold)”的8脚PDIP、SOIC、TSSOP 和TDFN封装
工业温度范围
应用
录像机
助听器
移动通信设备
激光打印机
管脚序号管脚名称描述
1 A0 器件地址
2 A1 器件地址
3 A2 器件地址
4 Vss 接地
5 SDA 串行数据
6 SCL 串行时钟
7 WP 写保护
8 Vcc 电源。
单片机模拟I2C总线及AT24C01应用实例(格式整理版)
单片机模拟I2C总线及AT24C01应用实例(格式整理版) I2C(Inter-Integrated Circuit)总线是一种由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备。
I2C总线产生于在80年代,最初为音频和视频设备开发,如今主要在服务器管理中使用,其中包括单个组件状态的通信。
例如管理员可对各个组件进行查询,以管理系统的配置或掌握组件的功能状态,如电源和系统风扇。
可随时监控内存、硬盘、网络、系统温度等多个参数,增加了系统的安全性,方便了管理。
1.I2C总线特点I2C总线最主要的优点是其简单性和有效性。
由于接口直接在组件之上,因此I2C总线占用的空间非常小,减少了电路板的空间和芯片管脚的数量,降低了互联成本。
总线的长度可高达25英尺,并且能够以10Kbps的最大传输速率支持40个组件。
I2C总线的另一个优点是,它支持多主控(multimastering),其中任何能够进行发送和接收的设备都可以成为主总线。
一个主控能够控制信号的传输和时钟频率。
当然,在任何时间点上只能有一个主控。
2.I2C总线工作原理2.1总线的构成及信号类型I2C总线是一种串行数据总线,只有二根信号线,一根是双向的数据线SDA,另一根是时钟线SCL。
在CPU与被控IC之间、IC与IC之间进行双向传送,最高传送速率100kbps。
各种被控制电路均并联在这条总线上,但就像电话机一样只有拨通各自的号码才能工作,所以每个电路和模块都有唯一的地址,在信息的传输过程中,I2C总线上并接的每一模块电路既是主控器(或被控器),又是发送器(或接收器),这取决于它所要完成的功能。
CPU发出的控制信号分为地址码和控制量两部分,地址码用来选址,即接通需要控制的电路,确定控制的种类;控制量决定该调整的类别(如对比度、亮度等)及需要调整的量。
这样,各控制电路虽然挂在同一条总线上,却彼此独立,互不相关。
2.2位的传输SDA线上的数据必须在时钟的高电平周期保持稳定数据线的高或低电平状态只有在SCL 线的时钟信号是低电平时才能改变,见图1:图12.3开始信号SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。
内置Reset、WDT电路的串行E2PROM原理及应用设计
内置Reset、WDT电路的串行E2PROM原理及应用设计一、概述CAT24Cxxx是集E2PROM存储器, 精确复位控制器和看门狗定时器三种流行功能于一体的芯片。
CAT24C161/162(16K),CA T24C081/082(8K),CA T24C041/042(4K)和CA T24C021/022(2K)主要作为I2C 串行CMOS E2PROM器件,采用先进的CMOS工艺大大降低了器件的功耗。
CAT24Cxxx另一特点是16 字节的页写缓冲区,提供8脚DIP和SOIC封装。
CA T24Cxxx的复位功能和看门狗定时器功能保证系统出现故障的时候能给CPU一个复位信号。
CAT24Cxxx的第2脚输出低电平复位信号,第7脚输出高电平复位信号。
CA T24Cxx1 看狗溢出信号从SDA脚输出CAT24Cxx2不具备看门狗功能。
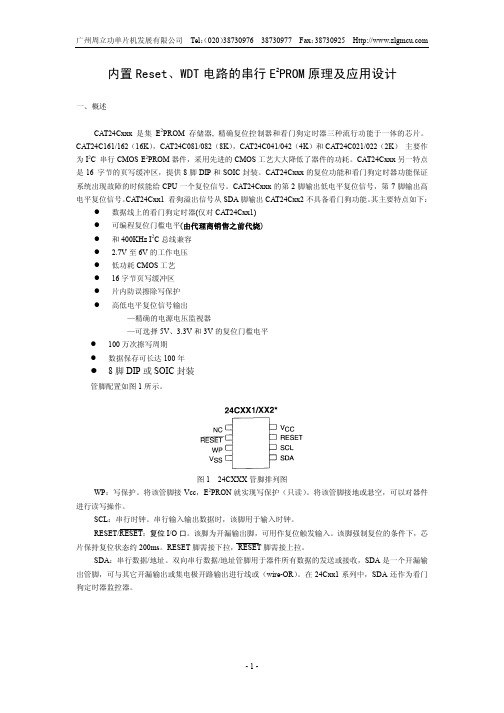
其主要特点如下: 数据线上的看门狗定时器(仅对CA T24Cxx1)可编程复位门槛电平(由代理商销售之前代烧)和400KHz I2C总线兼容2.7V至6V的工作电压低功耗CMOS工艺16字节页写缓冲区片内防误擦除写保护高低电平复位信号输出—精确的电源电压监视器—可选择5V、3.3V和3V的复位门槛电平100万次擦写周期数据保存可长达100年8脚DIP或SOIC封装管脚配置如图1所示。
图1 24CXXX管脚排列图WP:写保护。
将该管脚接Vcc,E2PRON就实现写保护(只读)。
将该管脚接地或悬空,可以对器件进行读写操作。
SCL:串行时钟。
串行输入输出数据时,该脚用于输入时钟。
RESET/RESET:复位I/O口。
该脚为开漏输出脚,可用作复位触发输入。
该脚强制复位的条件下,芯片保持复位状态约200ms。
RESET脚需接上拉。
SDA:串行数据/地址。
双向串行数据/地址管脚用于器件所有数据的发送或接收,SDA是一个开漏输出管脚,可与其它开漏输出或集电极开路输出进行线或(wire-OR)。
串行E2PROMAT 24C512在单片机中应用
串行E2PROMAT 24C512 在单片机中应用
1 概述
近年来,以单片机为核心构成的智能仪器仪表与数据采集系统获得了愈来愈
广泛的应用。
传统的数据存储方法均是通过总线型非易失数据存储器来保存采
集的数据。
随着单片机技术的不断发展及各种非总线型单片机的不断涌现,采
用非总线型单片机并配合大容量串行E2PROM 构成的数据存储系统,将是一
种非常好的数据存储方法。
该方法一方面可提高系统的可靠性,另一方面又可
降低系统成本。
AT24C512 是ATMEL 公司新近推出的具有I2C 总线容量达512Kbit(64K 乘以8)的E2PROM,该芯片的主要特性如下:存储容量为65536byte;与100kHz、400kHz、1MHzI2C 总线兼容;100000 次编程/擦写周期;单电源、读写电压为 1.8V~5.5V;ESD 保护电压4kV;数据可保存40 年;写保护功能,当WP 为高电平时,进入写保护状态;CMOS 低功耗技术,最大写入电流为
3mA;128byte 页写入缓存器;自动定时的写周期;具有8 引脚DIP 及20 引脚SOIC 封装等多种封装形式。
2 引脚排列及功能
AT24C512 的DIP 型封装及20 引脚的SOIC 型封装的引脚排列如图1 所示,各个引脚的功能如下:
SCL:串行时钟该引脚为一输入引脚,用于产生器件所有数据发送或接收的
时钟。
SDA:串行数据/地址双向串行数据/地址引脚,用于器件所有数据的发送或
接收。
SDA 是1 个开漏输出引脚,可与其它开漏输出或集电极开路输出进行线接。
I2C总线 24C02芯片的读写应用
I2C总线24C02芯片的读写应用什么是I2C总线?I2C(Inter-Integrated Circuit)总线是一种由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备。
也可以简单地理解为I2C是微控制器与外围芯片的一种通讯协议。
在不同的书籍中,可能会称为I2C,IIC,或者I平方C,但是概念也是一样的,只是叫法不同。
一﹑I2C总线特点I2C总线的优点非常多,其中最主要体现在1:硬件结构上具有相同的接口界面;2:电路接口的简单性;3:软件操作的一致性。
I2C总线占用芯片的引脚非常的少,只需要两组信号作为通信的协议,一条为数据线(SDA),另一条为时钟线(SCL)。
因此减少了电路板的空间和芯片管脚的数量,所以降低了互联成本。
总线的长度可高达25英尺,并且能够以10Kbps 的最大传输速率支持40个组件。
I2C总线还具备了另一个优点,就是任何能够进行发送和接收数据的设备都可以成为主控机。
当然,在任何时间点上只能允许有一个主控机。
图5-20(总线连接图)二﹑I2C总线工作原理图5-20为I2C总线的连接图。
I2C总线是由数据线SDA和时钟线SCL构成的串行总线,可发送和接收数据。
在单片机与被控IC之间,最高传送速率100kbps。
各种I2C器件均并联在这条总线上,就像电话线网络一样不会互相冲突,要互相通信就必须拨通其电话号码,每一个I2C模块都有唯一地址。
并接在I2C总线上的模块,既可以是主控器(或被控器),也可以是发送器(或接收器),这取决于它所要完成的功能。
I2C总线在传送数据过程中共有四种类型信号,它们分别是:起始信号、停止信号﹑应答信号与非应答信号。
三﹑I2C总线数据的传送规则起始信号:在I2C总线工作过程中,当SCL为高电平时,SDA由高电平向低电平跳变,定义为起始信号,起始信号由主控机产生。
如图5-21所示图5-21(开始信号)停止信号:当SCL为高电平时,SDA由低电平向高电平跳变,定义为停止信号,此信号也只能由主控机产生。
串行i2c总线e2prom at24cxxx的应用.
9.串行I2C总线E2PROM AT24CXXX的应用这一篇介绍I2C存储器的使用。
主要是介绍AT24CXX系列器件,它分为两类,主要是通过被存储容量地址来分的,一类是AT24C02-AT24C16,它的存储容量从256字节到2048字节。
另一类是AT24C32-AT24C1024,容量从4K-128K。
(理论上好像可以达到最高512K字节容量,但现在网上最高也就能看到AT24C1024也就是128K字节容量)原理:I2C总线是一种用于IC器件之间连接的二线制总线。
它通过SDA(串行数据线)及SCL(串行时钟线)两根线在连到总线上的器件之间传送信息,并根据地址识别每个器件:不管是单片机、存储器、LCD驱动器还是键盘接口。
I2C总线接口电路结构如图所示。
SDA和SCL均为双向I/O线,通过上拉电阻接正电源。
当总线空闲时,两根线都是高电平。
连接总线的器件的输出级必须是集电极或漏极开路,以具有线“与”功能。
I2C总线的数据传送速率在标准工作方式下为100kbit/s,在快速方式下,最高传送速率可达400kbit/s。
在I2C总线技术规范中,开始和结束信号(也称启动和停止信号)的定义如图所示。
当时钟线SCL为高电平时,数据线SDA由高电平跳变为低电平定义为“开始”信号;当SCL 线为高电平时,SDA线发生低电平到高电平的跳变为“结束”信号。
开始和结束信号都是由主器件产生。
在开始信号以后,总线即被认为处于忙状态;在结束信号以后的一段时间内,总线被认为是空闲的。
I2C总线的数据传送格式是:在I2C总线开始信号后,送出的第一个字节数据是用来选择从器件地址的,其中4-7位为器件码,如1010就是代表串行E2PROM器件。
1-3位为存储器的片选地址或存储器内的块地址码,如何区分?后面再做详细说明,第8位为方向位(R/W)。
方向位为“0”表示发送,即主器件把信息写到所选择的从器件;方向位为“1”表示主器件将从从器件读信息。
24C02串行E2PROM的读写资料
24C02串行E2PROM的读写资料I2C 总线是一种用于IC 器件之间连接的二线制总线。
它通过SDA(串行数据线)及SCL(串行时钟线)两根线在连到总线上的器件之间传送信息,并根据地址识别每个器件:不管是单片机、存储器、LCD 驱动器还是键盘接口。
1.I2C 总线的基本结构采用I2C 总线标准的单片机或IC 器件,其内部不仅有I2C 接口电路,而且将内部各单元电路按功能划分为若干相对独立的模块,通过软件寻址实现片选,减少了器件片选线的连接。
CPU 不仅能通过指令将某个功能单元电路挂靠或摘离总线,还可对该单元的工作状况进行检测,从而实现对硬件系统的既简单又灵活的扩展与控制。
I2C 总线接口电路结构如读写子程序如下:;写串行E2PROM 子程序EEPW; R3=10100000(命令1010+器件3 位地址+读/写。
器件地址一个芯片,是000); (R4)=片内字节地址; (R1)=欲写数据存放地址指针; (R7)=连续写字节数nEEPW: MOV P1,#0FFHCLR P1.0;发开始信号MOV A,R3;送器件地址ACALL SUBS MOV A,R4;送片内字节地址ACALL SUBSAGAIN: MOV A,@R1ACALL SUBS;调发送单字节子程序INCR1DJNZ R7,AGAIN;连续写n 个字节CLR P1.0;SDA 置0, 准备送停止信号ACALL DELAY ;延时以满足传输速率要求SETBP1.1;发停止信号ACALL DELAY SETB P1.0RETSUBS: MOV R0,#08H ;发送单字节子程序LOOP: CLR P1.1RLC A MOV P1.0,C NOP SETB P1.1ACALL DELAY DJNZ R0,LOOP ;循环8 次送8 个bit CLR P1.1ACALL DELAY SETB P1.1REP: MOV C,P1.0JC REP;判应答到否,未到则等待CLR。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9.串行I2C总线E2PROM AT24CXXX的应用这一篇介绍I2C存储器的使用。
主要是介绍AT24CXX系列器件,它分为两类,主要是通过被存储容量地址来分的,一类是AT24C02-AT24C16,它的存储容量从256字节到2048字节。
另一类是AT24C32-AT24C1024,容量从4K-128K。
(理论上好像可以达到最高512K字节容量,但现在网上最高也就能看到AT24C1024也就是128K字节容量)原理:I2C总线是一种用于IC器件之间连接的二线制总线。
它通过SDA(串行数据线)及SCL(串行时钟线)两根线在连到总线上的器件之间传送信息,并根据地址识别每个器件:不管是单片机、存储器、LCD驱动器还是键盘接口。
I2C总线接口电路结构如图所示。
SDA和SCL均为双向I/O线,通过上拉电阻接正电源。
当总线空闲时,两根线都是高电平。
连接总线的器件的输出级必须是集电极或漏极开路,以具有线“与”功能。
I2C总线的数据传送速率在标准工作方式下为100kbit/s,在快速方式下,最高传送速率可达400kbit/s。
在I2C总线技术规范中,开始和结束信号(也称启动和停止信号)的定义如图所示。
当时钟线SCL为高电平时,数据线SDA由高电平跳变为低电平定义为“开始”信号;当SCL 线为高电平时,SDA线发生低电平到高电平的跳变为“结束”信号。
开始和结束信号都是由主器件产生。
在开始信号以后,总线即被认为处于忙状态;在结束信号以后的一段时间内,总线被认为是空闲的。
I2C总线的数据传送格式是:在I2C总线开始信号后,送出的第一个字节数据是用来选择从器件地址的,其中4-7位为器件码,如1010就是代表串行E2PROM器件。
1-3位为存储器的片选地址或存储器内的块地址码,如何区分?后面再做详细说明,第8位为方向位(R/W)。
方向位为“0”表示发送,即主器件把信息写到所选择的从器件;方向位为“1”表示主器件将从从器件读信息。
开始信号后,系统中的各个器件将自己的地址和主器件送到总线上的地址进行比较,如果与主器件发送到总线上的地址一致,则该器件即为被主器件寻址的器件,其接收信息还是发送信息则由第8位(R/W)确定。
一个字节的写操作的过程:首先器件发出起始信号后,发送器件识别控制字节,即1010A2A1A00(最低位置0,即R/W 读写控制位为低电平0),然后等待应答信号指示从器件被寻址。
再发送一个AT24CXX存储器将要写入的位置地址。
再次等待AT24CXX应答信号以后,将发送数据字节,AT24CXX 接收到后写入到刚刚指定的存储器地址。
然后主器件再次等待AT24CXX的应答信号。
主器件最后发出停止信号。
在I2C总线上每次传送的数据字节数不限,但每一个字节必须为8位,而且每个传送的字节后面必须跟一个认可位(第9位),也叫应答位(ACK)。
数据的传送过程如图所示。
每次都是先传最高位,通常从器件在接收到每个字节后都会作出响应,即释放SCL线返回高电平,准备接收下一个数据字节,主器件可继续传送。
如果从器件正在处理一个实时事件而不能接收数据时,(例如正在处理一个内部中断,在这个中断处理完之前就不能接收I2C总线上的数据字节)可以使时钟SCL线保持低电平,从器件必须使SDA保持高电平,此时主器件产生1个结束信号,使传送异常结束,迫使主器件处于等待状态。
当从器件处理完毕时将释放SCL线,主器件继续传送。
当主器件发送完一个字节的数据后,接着发出对应于SCL线上的一个时钟(ACK)认可位,在此时钟内主器件释放SDA线,一个字节传送结束,而从器件的响应信号将SDA线拉成低电平,使SDA在该时钟的高电平期间为稳定的低电平。
从器件的响应信号结束后,SDA线返回高电平,进入下一个传送周期。
I2C总线还具有广播呼叫地址用于寻址总线上所有器件的功能。
若一个器件不需要广播呼叫寻址中所提供的任何数据,则可以忽略该地址不作响应。
如果该器件需要广播呼叫寻址中提供的数据,则应对地址作出响应,其表现为一个接收器。
5.总线竞争的仲裁总线上可能挂接有多个器件,有时会发生两个或多个主器件同时想占用总线的情况。
例如,多单片机系统中,可能在某一时刻有两个单片机要同时向总线发送数据,这种情况叫做总线竞争。
I2C总线具有多主控能力,可以对发生在SDA线上的总线竞争进行仲裁,其仲裁原则是这样的:当多个主器件同时想占用总线时,如果某个主器件发送高电平,而另一个主器件发送低电平,则发送电平与此时SDA总线电平不符的那个器件将自动关闭其输出级。
总线竞争的仲裁是在两个层次上进行的。
首先是地址位的比较,如果主器件寻址同一个从器件,则进入数据位的比较,从而确保了竞争仲裁的可靠性。
由于是利用I2C总线上的信息进行仲裁,因此不会造成信息的丢失。
器件说明:AT24CXXX系列引脚图如下现在我先来说说AT24CXX的具体使用假设用AT89S51的P0.0做SDA总线,P0.1做SCL总线。
有若干个I2C器件挂接在SDA和SCL总线上。
现在要对E2PROM_01存储器进行写字节操作看看它是如何找到的。
上面说过在发送完一个开始信号后接着发送一个字节的器件识别信号。
这一个字节的4-7位就是器件识别码。
1010就是对应E2PROM器件,其它器件就不再理会了。
1-3位是器件的物理地址,也就是说如果是E2PROM,它可以在I2C总线上挂接(000-111)8个E2PROM。
在这里就得详细说说AT24CXX上的A0,A1,A2和这个器件识别字节之间的关系了。
上面说过存储器的寻址范围是一个字节,也就256个,AT24C02的存储容量为256字字,刚刚好将一个字节的地址用完。
器件电路上A0,A1,A2三个管脚通过接高电平或低电平来和AT89S51发送过来的器件识别控制字节相匹配,从而得以识别出AT89S51将要操作的那个存储器。
现在AT24C04的容量是512个字节,那不是一个字节的地址不够用了吗?其实它是将512个字节为成两个页,每页256字节,而页地址就是器件识别控制字节的1位。
前面说了这个1-3位不是和器件上的A0,A1,A2匹配来识别器件的吗?是的,但存储器容量超过256字节情况就有变了。
AT24C04上的A0这时就废弃不用了,只用A1和A2,这样就只能接(00-11)四个AT24C04了,同样AT24C08容量为1K字节分为4页了,于是页地址就是器件识别控制字节的1-2位,器件上的A0,A1废弃不用,只用A2,就只能接两个AT24C08了。
AT24C16容量为2K字节,分为8页。
页地址是器件识别控制字节的1-3位,全用了。
器件上的A0,A1,A2,就无效了,只能接一只AT24C16。
我这么说能明白吗?对于大容量AT24C32-1024的存储器。
器件的存储寻址地址为两个字节,所以它的一页为65536(64K)。
AT24C32-64的容量为4K字节-8K字节,在一页范围,可以接8只器件。
从AT24C128-1024的器件代号也由1010改为10100,多了一位,识别控制字节的器件物理地址就少了一位,变为1-2位,相应的在器件管脚上A2也废弃空着了,因此最多只能接四只器件。
AT24C128-512只有两位器件地址所以最多只能接四只器件。
而AT24C1024的容量为128K,分为两页,识别控制字节的的1位为页地址,器件的A0脚废弃不用,只用了A1。
因此只能接2只器件。
下面我们进行具体的制做先准备好器件如下图,我用的是AT24C16原先的板子如下图焊好后。
好!下面我们进行调试:插上主电源。
但AT24C16的电源短路帽不接,在短路帽两个针之间接上万用表的电流档检查是否有短路和静态电流的大小。
实测静态电流几乎为零,改变两个数据线的电平时,电流会有所上升,说明电路基本正常。
现在我们接上电源短路帽把AT24C16电源接好。
将两个数据线用跳线接到P1.6和P1.7口上(接到哪个口上可以自己选的)。
注意分清哪个是SDA哪个是SCL。
别弄错了。
把LCD12864装上,后面我们就要进行软件的调试了。
后面一篇,我们进行软件件部分的调试。
先将源代码附上。
前面部分LCD12864的代码基本不变,添加上AT24C16的代码。
//LCD12864//************************************************* *********//连线表:CPU=89S51 SysClock=12MHz*//RS=P2.0 R/W=P2.1 E=P2.2 CS1=P2.3 CS2=P2.4 *//DB0-DB7=P3.0-P3.7 /Reset=InBoard*//************************************************* *********//24c16//************************************************* *********//连线表:CPU=89S51 SysClock=12MHz*//SDA=P1.6 SCL=P1.7//************************************************* *********#include <reg52.h>#include <stdlib.h>#include <intrins.h>#include <stdio.h>#include <math.h>#define uchar unsigned char#define uint unsigned int/****************LCD12864引脚定义*****************/ #define DataPort P3 //LCD128*64 I/O 信号管脚sbit RS =P2^0; //数据指令sbit RW =P2^1; //读写sbit E =P2^2; //使能sbit CSL =P2^3; //左片选sbit CSR =P2^4; //右片选uchar Page; //页地址uchar Col; //列地址uchar code BMP1[]; //一幅图uchar code HZK_12[]; //12×12阵点字模uchar code ASC_5x7[]; //5×7阵点字模uchar str[4];/**************AT24C16引脚定义*****************/ sbit SDA =P1^6; //数据sbit SCL =P1^7; //时钟/***********************************************//****************LCD12864函数定义*******************/void BusyL(void); //左屏检测忙void BusyR(void); //右屏检测忙void CheckBusy(void); //读取忙信号void Delay(uint MS); //延时void Locatexy(void); //将屏幕横向0-12纵向0-7转换成左、右屏的的X、Yvoid WriteCommandL( uchar CommandByte ); //向左屏写入指令void WriteCommandR( uchar CommandByte ); //向右屏写入指令uchar ReadData( void ); //读数据void WriteData( uchar DataByte ); //写数据void LcmClear( void ); //清屏void LcmInit( void ); //初始化void LcmPutBMP( uchar *puts ); //显示一幅图void LcmReverseBMP( void ); //将整屏反显void LcmPutHZ_12( uchar x,uchar y,uchar HZcode ); //在屏幕上任意点显示一个12×12汉字uchar * uchartostr(unsigned charunm); //将值转成字符串void LcmPutAsc( uchar asc ); //显示一个5×7的ASC字符void LcmPutstr( uchar row,uchar y,uchar *str ); //在设定位置显示字符串void LcmPutpoint( uchar ro,uchar lie,ucharcolour ); //在设定位置显示一个点/****************AT24C16函数定义*******************//****向总线上发送n字节数***/bit write_nbyte(uchar block_addr,uchar addr,uchar *s,uchar numb);/****从总线上读取n个字节数******/bit read_nbyte(uchar block_addr,uchar addr,uchar*s,uchar numb);/*****************************说明:block_addr 存储器的块地址选0-8addr 存储器的存储地址*s 一般是用在数组的首地址numb 要写入的字节数********************************//***************************//*检查Busy */ /***************************/void BusyL(void){CSL= 1;CSR= 0;CheckBusy();}void BusyR(void){CSL= 0;CSR= 1;CheckBusy();}void CheckBusy(void){RS = 0; //指令RW = 1;DataPort= 0xFF; //输出0xff以便读取正确E = 1;_nop_();while(0);//DataPort &0x80); //Status Read Bit7 = BUSYE = 0;_nop_();}/************************************************** ******//*根据设定的坐标数据,定位LCM上的下一个操作单元位置 *//************************************************** ******/void Locatexy(void){uchar x,y;switch (Col&0xc0) /* col.and.0xC0 */{/*条件分支执行 */case0: {BusyL();break;}/*左区 */case0x40: {BusyR();break;}/*右区 */}x = Col&0x3F|0x40; /* col.and.0x3f.or.Set Y Address*/y = Page&0x07|0xB8; /* row.and.0x07.or.set Page */CheckBusy();/* waitting for enable */RS =0; //指令RW =0; //写DataPort =y; //设置页面地址E = 1;_nop_();E = 0;_nop_();CheckBusy();/* waitting for enable */RS = 0;RW = 0;DataPort =x; //设置列地址E = 1;_nop_();E = 0;_nop_();}/***************************//*写指令 */ /***************************/void WriteCommandL( uchar CommandByte ){BusyL();DataPort = CommandByte;RS = 0; //指令RW = 0;E = 1;_nop_();E = 0;_nop_();}void WriteCommandR( uchar CommandByte ){BusyR();DataPort = CommandByte;RS = 0; //指令RW = 0;E = 1;_nop_();E = 0;_nop_();}/***************************//*读数据 *//***************************/uchar ReadData( void ){uchar DataByte;Locatexy(); /*坐标定位,返回时保留分区状态不变 */RS = 1; /*数据输出*/RW = 1; /*读入 */DataPort =0xFF; //输出0xff以便读取正确E = 1; /*读入到LCM*/_nop_();DataByte = DataPort; /*数据读出到数据口P1 */E = 0;_nop_();return DataByte;}/***************************//*写数据 *//***************************/void WriteData( uchar DataByte ){Locatexy(); /*坐标定位,返回时保留分区状态不变 */RS = 1; /*数据输出*/RW = 0; /*写输出 */DataPort = DataByte; /*数据输出到数据口 */E = 1; /*写入到LCM*/_nop_();E = 0;_nop_();}void LcmClear( void ){Page = 0;Col = 0;for(Page=0;Page<8;Page++)for(Col=0;Col<128;Co l++)Writ eData(0);}void LcmInit( void ){Delay(200); //等待复位WriteCommandL(0x3f); //开显示WriteCommandR(0x3f);WriteCommandL(0xc0); //设置起始地址=0WriteCommandR(0xc0);WriteCommandL(0x3f); //开显示WriteCommandR(0x3f);LcmClear();Col = 0;Page= 0;Locatexy();}void LcmPutBMP( uchar *puts ){uint X=0;Page = 0;Col = 0;for(Page=0;Page<8;Page++){for(Col=0;Col<128;Co l++){eData( puts[X] );X++;}}}void LcmReverseBMP( void ){uchar temp;Page = 0;Col = 0;for(Page=0;Page<8;Page++){for(Col=0;Col<128;Co l++){temp = ReadData(); //空读一次temp = ReadData();temp = ~temp;eData(temp);}}}void LcmPutHZ_12( uchar x,uchar y,uchar HZcode ) {uchar offset,Rd,Wt,m,tmp,i;uint n;if(x<117&y<53){Page=(y & 0x38)>>3;Col=x;n = 0x18*HZcode;offset=y&0x07;if(offset<5){for(i=12;i>0;i--){Rd=ReadData();Rd=ReadData();m=HZK_12[n];Wt=Rd&(0xff>>(8-offset))|( m<<offset);WriteData(Wt);Page++;n++;tmp=m;m=HZK_12[n];Rd=ReadData();Rd=ReadData();Wt=tmp>>(8-offset)|(m<<offset)|(Rd &(0xff<<(offset+4)));WriteData(Wt);Col++;Page--;n++;}}else{for(i=12;i>0;i--){Rd=ReadData();Rd=ReadData();m=HZK_12[n];Wt=Rd&(0xff>>(8-offset ))|(m<<offset);WriteData(Wt);Page++;n++;tmp=m;m=HZK_12[n];Wt=tmp>>(8-offset)|(m<<offset);WriteData(Wt);Page++;n++;Rd=ReadData();Rd=ReadData();Wt=m>>(8-offset)|(Rd&(0xff<<(offset-4) ));WriteData(Wt);Page=Page-2;//恢复位置Col++; //修正下一个汉字的起始位置}}}}uchar * uchartostr(uchar unm) {uchar x00,xx,x0,x,n;x00=unm/100;xx=unm%100;x0=xx/10;x=xx%10;n=0;if(x00!=0){ str[n]=x00+48; //值加48即为字符 n++;}if(!(x00==0&x0==0)){ str[n]=x0+48;n++;}str[n]=x+48;n++;str[n]='\0';return str;}void LcmPutAsc( uchar asc ){uchar j;uint x;x = 5*(asc-32);for(j=0;j<5;j++){Writ eData(ASC_5x7[x]);x++;Col+ +;}WriteData(0x00);Col++;}void LcmPutstr( uchar row,uchar y,uchar * str ) { unsigned char * x;x=str;Page=row;Col=y;while(*x!='\0'){ LcmPutAsc( *x );x++;}}void LcmPutpoint( uchar ro,uchar lie,ucharcolour ) //画点函数{if((ro<64)&(lie<128)){uchar modbyte,outByte;uchar offsetbit;Col=lie; / /列等于liePage=(ro & 0x38)>>3; //页等于行数row与00111000B再右移3位offsetbit=ro&0x07; //偏移量为行数与00000111modbyte=1;modbyte<<= offsetbit; //输出位的模00000001左移offsetbit位outByte=ReadData();outByte=ReadData();if(colour==0){modbyte=~modbyte;outByte=modbyte&outByte; //输出位不影响其它位}else outByte=modbyte|ReadData(); //输出位不影响其它位WriteData(outByte);}}void Delay(uint MS){uchar us,usn;while(MS!=0){usn =2; //for 12Mwhile(usn!=0){us=0 xf6;whil e (us!=0){us--;};usn--;}MS--;}}//下面是24c016的函数//**********************************************************//连线表:CPU=89C51 SysClock=12MHz*//SDL=P1.6 SCL=P1.7//************************************************* *********/********起始信号*********/void start_iic(){SDA=1;SCL=1;_nop_();_nop_();SDA=0;_nop_();_nop_();SCL=0;}/*************************//********停止信号*********/void stop_iic(){SDA=0;SCL=1;_nop_();_nop_();SDA=1;_nop_();_nop_();SCL=0;}/***********************//*******产生应答信号********/ void ack_iic(){SDA=0;SCL=1;_nop_();_nop_();SCL=0;SDA=1;}/*************************//*****产生非应答信号******/void nack_iic(){SDA=1;SCL=1;_nop_();_nop_();SCL=0;SDA=0;}/************************//****向总线上发送一个字节数据****/ write_byte(uchar c){uchar i;for(i=0;i<8;i++){if(c&0x80) SDA=1;else SDA=0;SCL=1;_nop_();_nop_();SCL=0;c=c<<1;}SDA=1;SCL=1;_nop_();_nop_();if(SDA==1) F0=0;else F0=1;SCL=0;}/*************************//*****从总线上读取一个字节数据*******/ uchar read_byte(){uchar i;uchar r=0;SDA=1;for(i=0;i<8;i++){r=r<<1;SCL=1;_nop_();_nop_();if(SDA==1) r++;SCL=0;}return r;}/*******************************//****向总线上发送n字节数据*****/bit write_nbyte(uchar block_addr,uchar addr,uchar *s,uchar numb)/*****************************block_addr 存储器的块地址选0-8addr 存储器的存储地址*s 一般是用在数组的首地址numb 要写入的字节数********************************/{uchar i,slave;start_iic();slave=0xa0|(block_addr<<1);write_byte(slave);if(F0==0) return 0;write_byte(addr);if(F0==0) return 0;for(i=0;i<numb;i++){write_byte(*s);if(F0==0) return 0;s++;}stop_iic();return (1);}/***************************//****从总线上读取n个字节数据***/bit read_nbyte(uchar block_addr,uchar addr,uchar *s,uchar numb)/******变量说明:block_addr 存储器的块地址选0-8 addr 存储器的存储地址*s 一般是用在数组的首地址numb 要写入的字节数*******/{uchar i,slave;start_iic();slave=0xa0|(block_addr<<1);write_byte(slave);if(F0==0) return 0;write_byte(addr);if(F0==0) return 0;start_iic();slave=0xa1|(block_addr<<1);write_byte(slave);if(F0==0) return 0;for(i=0;i<numb-1;i++){*s=read_byte();ack_iic();s++;}*s=read_byte();nack_iic();stop_iic();return (1);}/**************************/void Main( void ){uchar x,i;uchar *ascii;uchar abcd[9];LcmInit();LcmClear();ascii=abcd;//write_nbyte(0,0,ascii,8);read_nbyte(0,0,ascii,8);while(1){LcmClear();LcmPutBMP(BMP1);Delay(3000);LcmClear();//LcmReverseBMP();Delay(1000);//LcmClear();/*x=0;for(i=0;i<8;i++){LcmPutHZ_12(x,i*7,i) ;x=x+16;}*/LcmPutstr( 3,40,ascii );LcmPutstr( 5,40,"AT24C16!" );Delay(5000);}}unsigned char codeBMP1[]={ //字节倒序//-- 调入了一幅图像:E:!Program!BmpSample12864.bmp //宽度x高度=12640x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xE0,0xF0,0xFC,0xFE,0xFE,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0x9F,0xCF,0xDF,0x9F,0x9E,0x3E,0xFF,0xFE,0xFE,0xFF,0xFF,0xFF,0xFF,0xFF,0xFA,0xFC,0xF8,0xE0,0xC0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xC0,0xF0,0xF8,0xFC,0xFE,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xDF,0xEF,0xCF,0xDF,0x9F,0x0F,0x1F,0x7F,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFE,0xFC,0xF0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xC0,0xFC,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xF0,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x10,0xFE,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFD,0xFB,0xFF, 0xFF,0xFF,0xFF,0xFE,0xF8,0xFE,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFE, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xBF,0x3F, 0x37,0x37,0x37,0x27,0x63,0x43,0x03,0x03, 0x03,0x03,0x03,0x07,0x67,0x27,0x0F,0x0F, 0x1F,0x3F,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x10,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0x7F,0x7F,0x7F, 0x7F,0x7F,0x3F,0x3F,0x3F,0x3F,0x3F,0x3F, 0x3F,0x3F,0x3F,0x3F,0x3F,0x7F,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0x7F,0x3F, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x80,0xE0,0xFC,0xFE,0xFE,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xDF,0x0F,0x07,0x07,0x03, 0x03,0x03,0x03,0x02,0xC0,0xAC,0xBF,0xA0, 0x80,0x00,0x00,0x00,0x02,0x02,0x06,0x06, 0x04,0x00,0x3F,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFE,0xFC,0xF0,0xE0, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x01,0x03,0x07,0x0F,0x1F,0x3F,0x3F, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xBF,0x3F,0x3F,0x3D, 0x7D,0xF8,0xF0,0xF0,0xC0,0x00,0x00,0x00, 0x08,0x8C,0xFC,0xFE,0xEE,0xE6,0xC2,0xC0,0x1F,0x1F,0x87,0x0D,0x7D,0x70,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xC0, 0xF0,0xFE,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFC,0xE0,0x00, 0x00,0x00,0x02,0xE7,0xE7,0xE7,0xE7,0xC3, 0xC3,0xC1,0x82,0x87,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0xE3,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFC,0xF8,0xE0,0xC0,0x80,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x07, 0x7F,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xDF,0x1F,0x1F,0x1F,0x1B,0xF9, 0xF9,0xFF,0xFF,0xFF,0xFF,0x80,0x00,0x00, 0x00,0x01,0x01,0x03,0x03,0x83,0x83,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x01,0x03,0x00,0x00,0x00,0x00, 0xF8,0xFC,0xFC,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFE,0xFC,0xF8,0xFE,0x8F,0x8F,0x0E,0x06, 0x0E,0x0C,0x0C,0x00,0x01,0x00,0x00,0x80, 0xC0,0xF0,0xFC,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFE,0xFC, 0xF8,0xF0,0xF0,0xE0,0x00,0x00,0x00,0x00, 0x00,0x03,0x07,0x0F,0x1F,0x1F,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFE,0xFC,0xFC,0xFE,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xDF,0xCF,0xDE, 0xD4,0xC2,0x82,0x80,0x80,0x83,0xC7,0xC7, 0x0F,0x04,0x00,0x00,0x00,0x00,0x00,0x00, 0xC0,0xF4,0xFC,0xFC,0xFC,0xFC,0xF8,0xF8, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0x7F,0x3F,0x1F,0x1F,0xDF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0x3F,0x1E, 0x1E,0x0E,0x0C,0x04,0x02,0x06,0x1F,0xFF, 0xFF,0xCF,0x0F,0x0F,0x0F,0x1F,0x3F,0x7F, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0x7F,0x1F,0x1F,0x03,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xC1,0xE7, 0xEF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFB,0xFB, 0xF3,0xF9,0x71,0x31,0x00,0x00,0x00,0x01, 0x00,0x00,0x00,0x00,0x00,0x80,0xE0,0xFF, 0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF, 0x03,0x07,0x0F,0x1F,0x1F,0x3F,0x3F,0x1F, 0x1F,0x1F,0x0F,0x4F,0x67,0x27,0x33,0x31, 0x38,0x38,0x78,0x7C,0x7E,0x7F,0x7F,0x7F, 0x7F,0x7F,0x7F,0x7F,0x3F,0x3F,0x7F,0x7F, 0x7F,0x7F,0x7D,0x79,0x79,0x70,0x70,0x70, 0x70,0x70,0x70,0x78,0x78,0x3C,0x5E,0x6F, 0x3F,0x77,0x0F,0x0C,0x7C,0x78,0x78,0x40, 0x00,0x01,0x01,0x03,0x07,0x0F,0x1F,0x1F, 0x1F,0x1F,0x1F,0x1F,0x0F,0x07,0x03,0x00, 0x00,0x00,0x00,0x40,0x60,0x70,0x70,0x78, 0x78,0x7C,0x7E,0x7F,0x7F,0x7F,0x7F,0x7F, 0x7F,0x7F,0x7F,0x7F,0x7F,0x7F,0x7F,0x7F, 0x7F,0x7F,0x7F,0x7F,0x7F,0x7F,0x7F,0x7C, 0x7C,0x7C,0x78,0x78,0x70,0x58,0x00,0x00, 0x40,0x70,0x78,0x7C,0x7F,0x7F,0x7F,0x7F, 0x7F,0x7F,0x07,0x07,0x0F,0x1F,0x3F,0x7F};uchar code ASC_5x7[]={0x00, 0x00, 0x00, 0x00, 0x00, // 0x00, 0x00, 0x4F, 0x00, 0x00, // 0x00, 0x07, 0x00, 0x07, 0x00, // 0x14, 0x7F, 0x14, 0x7F, 0x14, // 0x24, 0x2A, 0x7F, 0x2A, 0x12, // 0x23, 0x13, 0x08, 0x64, 0x62, // 0x36, 0x49, 0x55, 0x22, 0x50, // 0x00, 0x05, 0x03, 0x00, 0x00, // 0x00, 0x1C, 0x22, 0x41, 0x00, // 0x00, 0x41, 0x22, 0x1C, 0x00, // 0x14, 0x08, 0x3E, 0x08, 0x14, // 0x08, 0x08, 0x3E, 0x08, 0x08, // 0x00, 0x50, 0x30, 0x00, 0x00, // 0x08, 0x08, 0x08, 0x08, 0x00, // 0x00, 0x60, 0x60, 0x00, 0x00, // 0x20, 0x10, 0x08, 0x04, 0x02, // 0x3E, 0x51, 0x49, 0x45, 0x3E, // 0x00, 0x42, 0x7F, 0x40, 0x00, // 0x42, 0x61, 0x51, 0x49, 0x46, //0x21, 0x41, 0x45, 0x4B, 0x31, // 0x18, 0x14, 0x12, 0x7F, 0x10, // 0x27, 0x45, 0x45, 0x45, 0x39, // 0x3C, 0x4A, 0x49, 0x49, 0x30, // 0x01, 0x01, 0x79, 0x05, 0x03, // 0x36, 0x49, 0x49, 0x49, 0x36, // 0x06, 0x49, 0x49, 0x29, 0x1E, // 0x00, 0x36, 0x36, 0x00, 0x00, // 0x00, 0x56, 0x36, 0x00, 0x00, // 0x08, 0x14, 0x22, 0x41, 0x00, // 0x14, 0x14, 0x14, 0x14, 0x14, // 0x00, 0x41, 0x22, 0x14, 0x08, // 0x02, 0x01, 0x51, 0x09, 0x06, // 0x32, 0x49, 0x79, 0x41, 0x3E, // 0x7E, 0x11, 0x11, 0x11, 0x7E, // 0x41, 0x7F, 0x49, 0x49, 0x36, // 0x3E, 0x41, 0x41, 0x41, 0x22, // 0x41, 0x7F, 0x41, 0x41, 0x3E, // 0x7F, 0x49, 0x49, 0x49, 0x49, // 0x7F, 0x09, 0x09, 0x09, 0x01, // 0x3E, 0x41, 0x41, 0x49, 0x7A, // 0x7F, 0x08, 0x08, 0x08, 0x7F, //。