平面直角坐标系和极坐标
平面直角坐标系

D
E
120m
C
60 3m
45o 50m 60o A) 60m B A(O
x
二、极坐标系 极坐标(,)与(,+2k)(k∈Z)表示 同一个点.特别地,极点O的坐标为(0,) ( ∈R).和直角坐标不同,平面内一个 点的极坐标有无数种表示. 如果规定>0,0≤<2,那么除 极点外,平面内的点可用惟一的极坐标 (,)表示;同时,极坐标表示的点(,) 也是惟一确定的.
x x ② y 3 y 我们把②式叫做平面直角坐标系中的一个标伸长变换.
问题3:怎样由正弦曲线y=sinx得到曲线y=3sin2x? y 在正弦曲线y=sinx上任取一 点P(x, y),保持纵坐标不变, 将横坐标x缩为原来的1/2; O x 在此基础上,将纵坐标变为原来的 3倍,就得到正弦曲线y=3sin2x. 即在正弦曲线y=sinx上任取一点P(x,y),若设点 P(x,y)经变换得到点为P’(x’, y’),坐标对应关系 为: 1
5 6
2 3
2
B
A
3
6
2
5 6
2 3
2
3
E
B A D
6
2
7 6
7 6
4 3
C
3 2
5 3
11 6
4 3
C
F
3 2
5 3
11 6
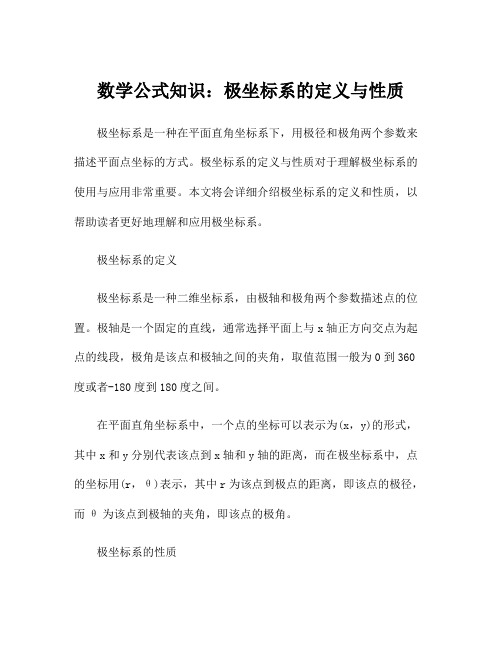
例2、在图中,用点A,B,C,D,E
分别表示教学楼,体育馆,图书馆, 实验楼,办公楼的位置.建立适当的 极坐标系,写出各点的极坐标.
∵点M的直角坐标为 (1,
3)
y
M (1, 3)
θ
数学公式知识:极坐标系的定义与性质
数学公式知识:极坐标系的定义与性质极坐标系是一种在平面直角坐标系下,用极径和极角两个参数来描述平面点坐标的方式。
极坐标系的定义与性质对于理解极坐标系的使用与应用非常重要。
本文将会详细介绍极坐标系的定义和性质,以帮助读者更好地理解和应用极坐标系。
极坐标系的定义极坐标系是一种二维坐标系,由极轴和极角两个参数描述点的位置。
极轴是一个固定的直线,通常选择平面上与x轴正方向交点为起点的线段,极角是该点和极轴之间的夹角,取值范围一般为0到360度或者-180度到180度之间。
在平面直角坐标系中,一个点的坐标可以表示为(x,y)的形式,其中x和y分别代表该点到x轴和y轴的距离,而在极坐标系中,点的坐标用(r,θ)表示,其中r为该点到极点的距离,即该点的极径,而θ为该点到极轴的夹角,即该点的极角。
极坐标系的性质极坐标系具有以下性质:1.点的极坐标系有唯一性每一个点都有唯一的极坐标系表示方法。
因为每个点到极点的距离和到极轴的夹角都是唯一的,所以用(r,θ)表示一个点的坐标时具有唯一性。
2.点的平面直角坐标系与极坐标系之间的联系一个点的坐标可以用平面直角坐标系和极坐标系两种方式表示。
平面直角坐标系表示时,一个点的坐标可以表示为(x,y)的形式,而在极坐标系表示时,则用(r,θ)来表示同一个点的坐标。
两种表示方式之间具有以下关系:x = rcosθ,y = rsinθr² = x² + y²,tanθ = y/x在使用极坐标系进行计算时,可以通过这些公式将极坐标系的坐标转换为平面直角坐标系的坐标。
同样,我们也可以通过将平面直角坐标系的坐标转换为极坐标系的坐标来进行计算。
3.数学公式的简化在某些情况下,使用极坐标系可以使公式的计算更简便。
与平面直角坐标系存在的复杂公式不同,极坐标系中的公式通常非常简单而容易推导。
例如,圆的极坐标公式为r = a,其中a为圆的半径。
在平面直角坐标系下,圆的公式是(x-a)² + (y-b)² = a²,其中a和b分别是圆心的坐标。
平面直角坐标系和极坐标
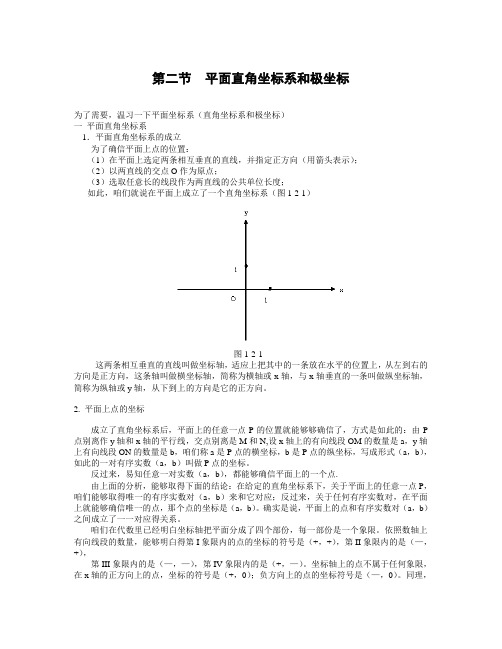
第二节平面直角坐标系和极坐标为了需要,温习一下平面坐标系(直角坐标系和极坐标)一平面直角坐标系1.平面直角坐标系的成立为了确信平面上点的位置:(1)在平面上选定两条相互垂直的直线,并指定正方向(用箭头表示);(2)以两直线的交点O作为原点;(3)选取任意长的线段作为两直线的公共单位长度;如此,咱们就说在平面上成立了一个直角坐标系(图1-2-1)图1-2-1这两条相互垂直的直线叫做坐标轴,适应上把其中的一条放在水平的位置上,从左到右的方向是正方向,这条轴叫做横坐标轴,简称为横轴或x轴,与x轴垂直的一条叫做纵坐标轴,简称为纵轴或y轴,从下到上的方向是它的正方向。
2. 平面上点的坐标成立了直角坐标系后,平面上的任意一点P的位置就能够够确信了,方式是如此的:由P 点别离作y轴和x轴的平行线,交点别离是M和N,设x轴上的有向线段OM的数量是a,y轴上有向线段ON的数量是b,咱们称a是P点的横坐标,b是P点的纵坐标,写成形式(a,b),如此的一对有序实数(a,b)叫做P点的坐标。
反过来,易知任意一对实数(a,b),都能够确信平面上的一个点.由上面的分析,能够取得下面的结论:在给定的直角坐标系下,关于平面上的任意一点P,咱们能够取得唯一的有序实数对(a,b)来和它对应;反过来,关于任何有序实数对,在平面上就能够确信唯一的点,那个点的坐标是(a,b)。
确实是说,平面上的点和有序实数对(a,b)之间成立了一一对应得关系。
咱们在代数里已经明白坐标轴把平面分成了四个部份,每一部份是一个象限。
依照数轴上有向线段的数量,能够明白得第I象限内的点的坐标的符号是(+,+),第II象限内的是(—,+),第III象限内的是(—,—),第IV象限内的是(+,—)。
坐标轴上的点不属于任何象限,在x轴的正方向上的点,坐标的符号是(+,0);负方向上的点的坐标符号是(—,0)。
同理,在y 轴的正方向上的点,坐标的符号是(0,+);负方向上的点的坐标符号是(0,—)。
极坐标与平面直角坐标的互换
例1 把下列点的极坐标化为直角坐标:
(1) A(8, )
(2) B(6, 3 )
(3) C(2, )
3
4
解:(1)设点A直角坐标为(x,y),由互化公式得
x 8cos 4,
3 y 8sin 4 3,
3
点A的直角坐标是 (4,4 3)
例2 把下列点的直角坐标化为极坐标: (1) P( 3,1); (2) Q( 2, 2); (2) R(0,2);
3
推广到一般情形:
A(1,1), B(2,2 )(1 0, 2 0)
则A,B两点间距离为
| AB | 12 22 212 cos(1 2 )
例3、在平面直角坐标系中,将曲线的方程 x2 y2 2x 0 化为极坐标系中的方程。
练习:把下面直角坐标方程化为极坐标方程
24
2
半径为 5 的圆。 2
小结
极坐标与直角坐标的互化公式
M (x, y)
x cos
y
s in
2 x2 y2
tan
y x
M (, )
0 2 且要依点所在象限决定
y
P
y
O
x x P1
0, 0 2
注:将xy点的直scio角ns坐标化为极坐标ta时2n, 取x
0, 0 2
2
y x
y2
(x 0)
极坐标与直角坐标的互化
三个前提条件:
(1)极点与直角坐标系的原点重合; (2)极轴与直角坐标系的x轴的正半轴重合; (3)两种坐标系的单位长度相同.
点的坐标的知识点总结
点的坐标的知识点总结一、概念点是几何中最基本的元素之一,它是没有大小和形状的,只有位置的概念。
在平面几何中,一个点的位置可以由其和参考坐标系中的两个坐标值来确定。
这两个坐标值分别叫做横坐标和纵坐标,通常用小括号分别括起来,中间用逗号隔开表示。
例如,点A的坐标为(x,y)。
其中,x是横坐标,y是纵坐标。
横坐标表示点在x轴上的位置,纵坐标表示点在y轴上的位置。
二、表示方法在平面直角坐标系中,点的位置是由两个坐标值确定的。
横坐标和纵坐标的取值范围可以是实数,也可以是整数,具体取决于所使用的坐标系和具体问题的要求。
通常,我们可以使用平面直角坐标系、极坐标系和球面坐标系来表示点的位置。
1、平面直角坐标系:平面直角坐标系是最常用的表示点的坐标的方法之一。
在平面直角坐标系中,x轴和y轴互相垂直,起始于原点O,并且正方向分别被定义为正的方向。
点的坐标表示为(x,y),其中x是点在x轴上的投影,y是点在y轴上的投影。
2、极坐标系:极坐标系是另一种表示点的坐标的方法。
在极坐标系中,点的位置不是由横纵坐标确定,而是由极径和极角确定。
极径表示点到坐标原点的距离,极角表示点在极轴上的极角。
点的坐标表示为(r,θ),其中r是点到原点的距离,θ是点在极轴上的极角。
3、球面坐标系:球面坐标系用来描述三维空间中点的位置。
在球面坐标系中,点的坐标表示为(r,θ,φ),其中r是点到原点的距离,θ是点在xz平面上的极角,φ是点与z轴的夹角。
球面坐标系能够描述点在球面上的位置,适用于球面上的问题。
三、坐标系坐标系是用来描述点的位置的基础工具之一。
在平面几何中,常用的坐标系包括直角坐标系、极坐标系和其他特殊的坐标系。
每种坐标系都有其独特的特点和适用范围。
1、直角坐标系:直角坐标系是最基本,也是最常用的坐标系。
在直角坐标系中,点的位置是由横坐标和纵坐标表示的。
横坐标和纵坐标的取值范围都是实数。
直角坐标系可以用于描述平面上的点的位置,以及平面上的图形和问题。
极坐标与直角坐标、普通方程与参数方程 的互相转化

极坐标与直角坐标、参数方程与普通方程的转化一、直角坐标的伸缩设点P(x ,y)是平面直角坐标系中的任意一点,在变换φ:的作用下,点P(x ,y)对应到点P ′(x ′,y ′),称φ为平面直角坐标系中的坐标伸缩⎩⎨⎧>='>=')()(0,0,μμλλy y x x 变换,简称伸缩变换.平面图形的伸缩变换可以用坐标伸缩变换来表示.在伸缩变换Error!下,直线仍然变成直线,抛物线仍然变成抛物线,双曲线仍然变成双曲线,圆可以变成椭圆,椭圆也可以变成圆(重点考察).【强化理解】1.曲线C 经过伸缩变换后,对应曲线的方程为:x 2+y 2=1,则曲线C 的方程为( )A .B .C .D .4x 2+9y 2=1【解答】解:曲线C 经过伸缩变换①后,对应曲线的方程为:x ′2+y ′2=1②, 把①代入②得到:故选:A2、在同一直角坐标系中,求满足下列图形变换的伸缩变换:由曲线4x 2+9y 2=36变成曲线x ′2+y ′2=1.【解答】解:设变换为φ:可将其代入x ′2+y ′2=1,得λ2x 2+μ2y 2=1. {x ′=λx (λ>0),y ′=μy (μ>0),)将4x 2+9y 2=36变形为+=1, x 29y 24比较系数得λ=,μ=. 1312所以将椭圆4x 2+9y 2=36上的所有点的横坐标变为原来的,纵坐标变为原来的,{x ′=13x ,y ′=12y .)1312可得到圆x ′2+y ′2=1. 亦可利用配凑法将4x 2+9y 2=36化为+=1,与x ′2+y ′2=1对应项比较即可得(x 3)2 (y 2)2{x ′=x 3,y ′=y 2.)二、极坐标1.公式:(1)极坐标与直角坐标的互化公式如下表: 点M 直角坐标(),x y极坐标(),ρθ 互化公式cos sin x y ρθρθ=⎧⎨=⎩ ()222tan 0x y y x x ρθ⎧=+⎪⎨=≠⎪⎩ 已知极坐标化成直角坐标已知直角坐标化成极坐标 2.极坐标与直角坐标的转化(1)点:有关点的极坐标与直角转化的思路A :直角坐标(),x y 化为极坐标(),ρθ的步骤①运用()222tan 0x y y x x ρθ⎧=+⎪⎨=≠⎪⎩②在[)0,2π内由()tan 0y x xθ=≠求θ时,由直角坐标的符号特征判断点所在的象限.B::极坐标(),ρθ化为直角坐标(),x y 的步骤,运用cos sin x y ρθρθ=⎧⎨=⎩(2)直线:直线的极坐标与直角坐标转化的思路A :直角坐标转化成极坐标思路:直接利用公式cos sin x y ρθρθ=⎧⎨=⎩,将式子里面的x 和y 用转化,最后整理化简即可。
人教A版数学选修4极坐标系与平面直角坐标系的互化

高中数学学习材料金戈铁骑整理制作极坐标系与平面直角坐标系的互化典题探究例1 将点M 的极坐标2(5,)3π化成直角坐标.例2将点M 的直角坐标)1,3(--化成极坐标.例3在极坐标系中,已知),6,2(),6,2(ππ-B A 求A,B 两点的距离。
例4已知,,A B C 三点的极坐标分别是52(2,),(6,),(4,6123πππ),求ABC ∆的面积.演练方阵A 档(巩固专练)1.将点的直角坐标(-2,23)化成极坐标得( ). A .(4,32π) B .(-4,32π) C .(-4,3π) D .(4,3π) 2.点M 的极坐标是(2,3π),则M 的直角坐标为( ) A .(1,3) B .(−3,1) C .(3,1) D .(−1,3) 3.极坐标方程 ρ cos θ=sin2θ( ρ≥0)表示的曲线是( ). A .一个圆B .两条射线或一个圆C .两条直线D .一条射线或一个圆4.极坐标方程θρcos +12= 化为普通方程是( ).A .y 2=4(x -1)B .y 2=4(1-x )C .y 2=2(x -1)D .y 2=2(1-x )5.点M 的直角坐标是(1,3)-,则点M 的极坐标为 . 6 化极坐标方程2cos 0ρθρ-=为直角坐标方程为 .7.将下列各点的极坐标化成直角坐标:3(3,),(4,).42A B ππ--8.将下列各点的直角坐标化成极坐标:(4,43),(1,1).C D ---9.在极坐标系中,求下列两点之间的距离: (1)5(7,),(2,)44A B ππ; (2)11(6,),(4,)412A B ππ-.10.在符合互化条件的直角坐标系和极坐标系中,将下列直角坐标方程(极坐标方程)转化为极坐标方程(直角坐标方程).(1)cos sin 0x y αα-=;(2)24cos52θρ=.B 档(提升精练)1.点P 在曲线 ρ cos θ +2ρ sin θ =3上,其中0≤θ ≤4π,ρ>0,则点P 的轨迹是( ). A .直线x +2y -3=0B .以(3,0)为端点的射线C . 圆(x -2)2+y =1D .以(1,1),(3,0)为端点的线段2.设点P 在曲线 ρ sin θ =2上,点Q 在曲线 ρ=-2cos θ上,则|PQ |的最小值为 ( ).A .2B .1C .3D .03.在满足极坐标和直角坐标互的化条件下,极坐标方程θθρ222sin 4+ cos 312=经过直角坐标系下的伸缩变换⎪⎩⎪⎨⎧''y =y x = x 3321后,得到的曲线是( ). A .直线 B .椭圆 C . 双曲线 D . 圆4.在极坐标系中,直线2= 4π+ sin )(θρ,被圆 ρ=3截得的弦长为( ).A .22B .2C .52D .325 直线cos sin 0x y αα+=的极坐标方程为____________________6.极坐标方程24sin52θρ⋅=表示的曲线是 。
平面直角坐标系平面直角坐标系

感谢您的观看
THANKS
性质
平面直角坐标系是一个正交坐标系,它具有唯一性和可数性 。
平面直角坐标系的建系的中心点 。
确定x轴与y轴
根据定义,x轴是一条与y轴垂直的数轴,y轴是 一条与x轴垂直的数轴。
确定单位长度
选择一个单位长度,通常选择一个合适的长度单 位,如毫米或厘米。
坐标系中的点与坐标
方向向量的计算
方向向量的计算可以通过两个点的坐标进行计算,得到一个向量,该向量的模等于两点之间的距离,方向与连 接两点的线段一致。
三维空间中的坐标系
三维空间中的坐标系定义
三维空间中的坐标系使用三个参数,x、y 、z,来定义空间中的任意一点。
VS
三维空间中的坐标系扩展
三维空间中的坐标系可以扩展到更高维度 的空间中,例如四维空间、五维空间等。
计算机图形学中的应用
像素坐标
在计算机图形学中,每个像素点都有其在平面直角坐标系中的位 置,通过坐标可以方便地对像素点进行操作。
渲染算法
通过平面直角坐标系可以设计各种渲染算法,如阴影算法、反射 算法等。
三维建模
在三维建模中,平面直角坐标系是基础,可以通过它来建立三维模 型的空间关系。
05
平面直角坐标系的扩展
平移平面直角坐标系中的点,其坐标值会相应地发生变化。平移过程中,点 的坐标值沿横轴或纵轴方向移动,移动距离等于平移方向上的坐标增量。
点的旋转
旋转平面直角坐标系中的点,其坐标值不会发生变化,但会围绕旋转中心转 动。旋转过程中,点的坐标值相对于旋转中心转动,旋转角度等于旋转角度 的弧度值。
距离与角度的计算
平面直角坐标系
2023-11-04
目 录
• 平面直角坐标系的基本概念 • 平面直角坐标系中的基本运算 • 平面直角坐标系中的图形变换 • 平面直角坐标系的应用 • 平面直角坐标系的扩展
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二节平面直角坐标系和极坐标为了需要,复习一下平面坐标系(直角坐标系和极坐标)一平面直角坐标系1.平面直角坐标系的建立为了确定平面上点的位置:(1)在平面上选定两条互相垂直的直线,并指定正方向(用箭头表示);(2)以两直线的交点O作为原点;(3)选取任意长的线段作为两直线的公共单位长度;这样,我们就说在平面上建立了一个直角坐标系(图1-2-1)图1-2-1这两条互相垂直的直线叫做坐标轴,习惯上把其中的一条放在水平的位置上,从左到右的方向是正方向,这条轴叫做横坐标轴,简称为横轴或x轴,与x轴垂直的一条叫做纵坐标轴,简称为纵轴或y轴,从下到上的方向是它的正方向。
2. 平面上点的坐标建立了直角坐标系后,平面上的任意一点P的位置就可以确定了,方法是这样的:由P点分别作y轴和x轴的平行线,交点分别是M和N,设x轴上的有向线段OM的数量是a,y轴上有向线段ON的数量是b,我们称a是P点的横坐标,b是P点的纵坐标,写成形式(a,b),这样的一对有序实数(a,b)叫做P点的坐标。
反过来,易知任意一对实数(a,b),都可以确定平面上的一个点.由上面的分析,可以得到下面的结论:在给定的直角坐标系下,对于平面上的任意一点P,我们可以得到唯一的有序实数对(a,b)来和它对应;反过来,对于任何有序实数对,在平面上就能确定唯一的点,这个点的坐标是(a,b)。
就是说,平面上的点和有序实数对(a,b)之间建立了一一对应得关系。
我们在代数里已经知道坐标轴把平面分成了四个部分,每一部分是一个象限。
根据数轴上有向线段的数量,可以理解第I 象限内的点的坐标的符号是(+,+),第II 象限内的是(—,+),第III 象限内的是(—,—),第IV 象限内的是(+,—)。
坐标轴上的点不属于任何象限,在x 轴的正方向上的点,坐标的符号是(+,0);负方向上的点的坐标符号是(—,0)。
同理, 在y 轴的正方向上的点,坐标的符号是(0,+);负方向上的点的坐标符号是(0,—)。
二 极坐标极坐标是另外一种重要的坐标法,有些几何轨迹题如果用极坐标法处理,它的方程比用直角坐标系来得简单,在数学分析中经常用到。
在平面的直角坐标系中,是以一对实数来确定平面上一点的位置,现在叙述另一种坐标,它对平面上的一点的位置虽然也是用有序实数对来确定,但这一对实数中,一个是表示距离,而另一个则是指示方向。
一般来说,取一个定点O ,称为极点,作一水平射线Ox ,称为极轴,在Ox 上规定单位长度,这样就组成了一个极坐标系。
平面上一点P 的位置,可以由OP 的长度及其∠xOP 的大小决定,这种确定一点位置的方法,叫做极坐标法。
具体地说,假设平面上有点P ,连接OP ,今设OP=ρ,又∠xOP=θ. ρ和θ的值确定了,则P 点的位置就确定了。
ρ叫做P 点的极半径,θ叫做P 点的极角,),(θρ叫做P 点的极坐标(规定ρ写在前,θ写在后)。
显然,每一对实数),(θρ决定平面上一个点的位置。
今以θ的值可为任何的正的或负的值(依逆时针方向转动所成的角规定为正,顺则为负),又为处理上便利起见,ρ也可以是负的值,如图1-2-2,OC 为角θ的终边,规定在OC 上度量的数为正,而在OC 的相反方向,即OC 的延长线上度量的数为负,如图1-2-2中,若点P 的坐标为),(θρ,则点P ’的坐标为),(θπρ+-。
图1-2-2ρ,θ的值照上面这样扩大之后,则在极坐标系中,一点的坐标有无穷的实数对。
例如,在图1-2-2中,可以看到,点P 的坐标一般写为),(θρ,也可以写成)2,(θπρ+,)4,(θπρ+ , )6,(θπρ+,又P ’的坐标可以是 )2,(),,(θπρθρ+--.也可以是 )3,(),,(θπρθπρ++.图1-2-3极坐标与直角坐标系的关系如图1-2-3所示,将极坐标的极点O 作为直角坐标系的原点,将极坐标的极轴作为直角坐标系x 轴的正半轴。
如果点P 在直角坐标系下的坐标为(x ,y ),在极坐标系下的坐标为),(θρ, 则有下列关系成立:ρθρθy sin x cos ==即 θρθρsin y cos x ==另外还有下式成立: xy tan ,y x 222=+=θρ. 例1.2 给出极坐标系中点P=(2,3/π)的直角坐标。
解: 由上面的讨论知: 332sin sin y 132coscos x ======πθρπθρ 故点P 的直角坐标为(1,3).极坐标方程的形式为0),(F =θρ. 在极坐标里,从ρ,θ的每一组对应的值),(11θρ ),(22θρ作为点的坐标,并且标出这些点,然后用平滑的曲线依次连结这些点,所得到的曲线就称为这个极坐标方程的曲线。
反过来,称这个方程为这个曲线的极坐标方程。
例1.3 试作曲线1=θ.显然1=θ表示的是一条直线。
例1.4试作曲线2=ρ.显然2=ρ表示的是一个以2为半径的圆周。
例1.5试给出曲线θρ2cos =在直角坐标系下的方程.解 因为ρθx cos =,故曲线θρ2cos =可以写为:ρρx 2⋅=即 x 22⋅=ρ又222x y +=ρ,故有:x y x ⋅=+222即:1)1(22=+-y x显然该方程表示的是以(1,0)为圆心,以1为半径的圆周。
习 题1. 三角形三个顶点的坐标如下:(a )(8,4),(0,-4),(2,4);(b )(3,5),(3,10),(0,2.5);(c )(2,0),(-1,3),(-1,-3).求作这些三角形.2. 设a=1,b=2,求作点(a ,b ),(b ,a ),(-a ,b ),(b ,-a ),(-b ,a ),(a ,-b ),(-a ,-b )和(-b ,-a ).3. 菱形每边长为5单位,它有一条对角线长为6个单位,如果把菱形的二对角线放在二坐标轴上,求它的各顶点的坐标.4. 已知点M (3,2),作它关于横轴、纵轴、原点的对称点,求这些点的坐标.5. 描出下列各点,它们的极坐标是:).,1(),0,6(),32,2(),32,6(),2,4(ππππ-- 6. 化下列各点的极坐标为直角坐标: )32,3(),6,2(),2,1(πππ-. 7. 化下列各点的直角坐标为极坐标:).5,3(),1,3(),4,0(),21,21(),0,2(---- 8. 极角6πθ=的点的轨迹是什么?写出经过极点的直线的极坐标方程.9. 曲线的极坐标方程是:(1);10sin =θρ (2)θρ4sin2=;求曲线的直角坐标方程.第三节 空间直角坐标系在平面几何中通过平面的解析几何,将数与形紧密地连接起来,用代数的方法研究平面几何,起到了非常良好的效果.本章将用类比法,用代数的方法研究立体几何.为此必须建立类似于平面的直角坐标系的概念.在我们生活的三维空间中,取一个平面将之分割为两部分,在此平面上建立一个直角坐标系xoy ,这里x 表示x 轴,y 表示y 轴.O 表示x ,y 轴的共同原点.过o 作平面xoy 的垂线(o 为垂足),作为新的数轴,叫做z 轴.并与x,y 轴拥有相同的长度单位,这样我们就得到空间中两两互相垂直的具有相同原点和相同单位长度的三个数轴:x 轴,y 轴, z 轴,这就形成了我们所谓的空间直角坐标系.相同的原点O 叫做空间直角坐标系的原点.从立体几何可以知道,x 轴与z 轴也唯一的决定了一个平面,称为xoz 平面.同样y 轴与z 轴也唯一的决定了一个平面,叫做yoz 平面.这三个平面都叫做坐标面.这三个轴都叫做坐标轴(如图1-3-1).显然三个坐标面将空间分成八个部分每个部分叫做卦限,其中,含三个坐标轴的正半轴的卦限叫做第一卦限,记为I .其余依次叫做第二卦限,第三卦限,第四卦限,第五卦限,等等.记为II ,III ,IV ,V 等, 如图1-3-1.图1-3-1另外我们注意到,在直角坐标系的形成过程中,我们实际上可以看到,z 轴是由y 轴绕原点逆时针旋转2π而得到的.而此时过原点O 且垂直于xoy 面的z 轴,虽然仅有一条,但是z 轴的正方向却有两种选择.如图1-3-2的选择,称为右手系.另外一种选择得到的坐标系叫做左图1-3-2手系.不失一般性我们以后仅考虑右手系.所以我们的空间中就多了直角坐标系.确定了坐标系之后,对于空间中的任意一点M ,作xoy 面的垂线仅一条,仅交xoy 面于一点M ',则对应于xoy 平面的坐标也仅有一个不妨记为()y x ,,这时M M '的距离也是一定的,若当从点M '指向点M 时,与z 轴正方向相同,则记为M M z '=,否则认为是负的,记为M M z '-= .所以任意一点M 就有唯一的三个数z y x ,,.反之任意给定三个数z y x ,,,当()y x ,作为面xoy 的点时,根据z 的正负,以上面的逆推可以唯一得到空间一点,因此空间的点与有序数组z y x ,,建立了这样的一一对应关系.称z y x ,,分别为点M 的横坐标,纵坐标,竖坐标.常记M 点为()z y x ,,或),,(z y x M .推论1 过点),,(z y x M 分别垂直于z y x ,,轴的平面与三个坐标轴的交点坐标也分别是()()z y x ,0,0,0,,0),0,0,(.推论2 坐标面上的:xoy 面上点的坐标为()0,,y x ,xoz 面上点的坐标为()z x ,0,,yoz 面上点的坐标为()z y ,,0.推论3 坐标轴上点的坐标分别是:x 轴上点的坐标是()0,0,x ,y 轴上点的坐标是()0,,0y ,z 轴上点的坐标是()z ,0,0图1-3-3设空间中两个点),,(1111z y x M 和),,(2222z y x M ,则两点21M M 的距离为221221221)()()(z z y y x x -+-+-.事实上分别过21,M M 点作三个坐标轴的垂直平面,这些平面围成了一个以21M M 为对角线的长方体(如图1-3-3).长方体的三个棱长分别是21x x -,21y y -,21z z -,由长方体对角线的长度公式知:22122122121)()()(z z y y x x M M -+-+-=这就是空间中两点的距离公式.在实数轴上,实数x 表示一个点.在平面中,两个数的数组()y x ,表示一个点,在三维空间中三个数的数组()z y x ,,表示一个点.一般的,n 个有序数组()n x x x x ,...,,,321表示n 维空间的点,并用n R 表示n 维空间.特别地,1R R =为实数轴.2R 表示平面的二维空间.3R 就是后面主要讨论的三维空间.习 题1. 在一个空间直角坐标系中画出下列各点:P (1,3,4),Q (-1,1,3),M (-1,-2,-3).2. 给定空间直角坐标系,设点M 的坐标为(x ,y ,z ),求它分别对于xOy 平面,x 轴,y 轴,z 轴和原点的对称点的坐标.3. 已知三角形ABC 中顶点A ,B ,C 的坐标分别为A (1,0,2),B (0,3,-1),C (2,-1,3),求三角形三边的长度.第四节 向量及其应用我们知道三维空间3R 的点,对应一个有序数组()z y x ,,.反之亦然.从另外一个角度来看,对任意一个这样的有序数组()z y x ,,,唯一地表示一个以原点为起点,点()z y x ,,为终点的有向线段.反过来,任意一个以原点为起点,()z y x ,,为终点的有向线段,则可以唯一地对应一个有序数组()z y x ,,,所以有向线段与点以及数组之间建立了一一对应.在力学等学科中,常用有向线段表示一个既有大小又有方向的量,如力,速度等等.我们称既有大小又有方向的量叫做向量.因此,我们也把形如()z y x ,,的有序数组称为3R 的向量.为了与点的坐标相区别,我们常把向量记为{}z y x ,,.称为向量的坐标表示.并且把由从原点到点()z y x ,,所确定的有向线段,也叫做向量,z y x ,,叫做向量的分量.同时,把空间3R 中某向量平移后所得到的有向线段认为是同一个向量.所以若空间中有起点),,(111z y x A 到终点()222,,z y x B 所得到的有向线段,可以看成是一个向量,此向量经过平移后将点A 置于原点,易得此向量可表示为{}121212,,z z y y x x ---,通常记为 =AB {}121212,,z z y y x x --- 特别,当A 为原点()0,0,0时,即{}222,,z y x OB =.当已知一向量的起点和终点时,一般用上方带有箭符“→”的小写字母表示,如 ,,b a 等.一般情况下,),,(111z y x A 对应一个向量OA ,()222,,z y x B 对应一个向量OB .,这时, 向量AB 即是由OA ,OB 所决定,并令AB =OB -OA .因为AB 的分量由OB 的分量相应地减去OA 的分量.即得OB 与OA 的差.特别地.原点O 所对应的向量,称为零向量,记为0.那么对于两个向量的差{}222,,0z y x OB B O ---=-=',记为OB -,显然B O '所表示的向量与OB 的关于原点对称.再进一步地有,OA -B O '={}{}{}212121222111,,,,,,z z y y x x z y x z y x +++=----,可以证明, A B '=OA -B O '所对应的向量在OA ,OB 所确定的平面上.并且与以OA ,OB 为相邻边的平行四边形OBCA 的对角线OC 所确定的向量OC 是同一个向量.如图1-4-1图1-4-1因此我们有理由称OA -B O '为OA 加上OB 的和.从而有OA +OB =OA -B O '=OA -(-OB )={}212121,,z z y y x x +++.即两向量相加等于对应分量相加.向量的加法满足交换律,结合律.即1. 对于任意的向量,,有+=+;2. 对于任意的向量,,,有()()++=++.特别地,设点()z y x P ,,,那么)2,2,2(),,(),,(z y x z y x z y x =+=+.相似地, )3,3,3(),,(),,(),,(z y x z y x z y x z y x =++=++. 若记2=+,那么)2,2,2(2z y x =,3=++, 那么)3,3,3(3z y x =.所以我们可以定义向量与数的乘积如下:定义1.3 设c 为任意实数,OP c 即是c 分别乘以OP 的每一个分量,即),,(cz cy cx c =. 从而可以很容易证明:OB c OA c OB OA c +=+)(;对21,c c 为实数有:c c c c 2121)(+=+;)()(2121c c c c =;OP OP -=-)1(.若用表示有向线段=222z y x ++.即为点P 到原点的距离.从而可得,||c =,事实上, ),,(z y x OP =,),,(cz cy cx cOP =.222222||)()()(z y x c cz cy cx c ++=++=,显然成立.c 的几何意义如下:如0>c ,那么c 是以原点O 为起点,点),,(cz cy cx C 为终点的有向线段, 而此是由OP 线段或OP扩大c 倍后得到的.当0<c 时,c =||||c =-|)|(c .显然是c ||的关于原点对称的向量.当0=c 时,c 就是零向量.如上所示,对于两个向量、具有同一起点O ,他们的关系有共线;或者由和能唯一地确定一个平面.在此平面上,以、为相邻的两边唯一地决定了一个平行四边形OBCA .如图1-4-2.图1-4-2 如果OA 垂直OB 记为OA ⊥OB ,我们有下面的结论: 定理1.3 OA ⊥OB 的充分必要条件是0212121=++z z y y x x .证明 如果OA ⊥OB ,那么由OA 、OB 为相邻的两边所确定的平行四边形为矩形. 所以对角线向量AB OB OA =-与OC OB OA =+的长度是相同的.即||||OC BA =,而BA ={}212121,,z z y y x x ---,=OC {}212121,,z z y y x x +++..22122122122221221221)()()(||||)()()(z z y y x x OC BA z z y y x x +++++===-+-+- 展开之后,再化简得到:0212121=++z z y y x x .反之很容易得到||BA OC =,即平行四边形两对角线相等.所以此平行四边形为矩形.从而OA ⊥OB .一般情况下,设OA ,OB 的夹角为θ,有时也记为<OA ,OB >.如20πθ<<,过B作O A 的垂线交O A 于D 点(如图1-4-3),那么θcos ||||OB OD =,||cos ||OA OB OD θ=,)0(≠OA .注意到OD OB DB -=,即{}111212*********,,cos z y x z y x z y x OD ⋅++++=θ.图1-4-3若令=c 212121222222cos z y x z y x ++++θ,则{}121212,,cz z cy y cx x ---=,{}111,,cz cy cx OD =,由定理知,0)()()(112112112=-+-+-cz cz z cy cy y cx cx x ,故0212121212121=-+-+-cz z z cy y y cx x x ,即.θθcos )(222222212121212121212121z y x z y x z y x c z z y y x x =++++=++=++为此,为了方便起见,定义·为此对应分量乘积之和,即·=212121z z y y x x ++,这种运算被称为两个向量与的数量积,由此可得:==θcos .所以有推论:OA ⊥OB 的充分必要条件是OA ·OB =0. 如果与的夹角为零时,称平行于,记为∥,所以∥的充分必要条件是|||=.从数量积的定义可以看出它在物理上的应用.一个物体在常力的作用下,沿直线从点1M 移动到点2M ,则力所做的功为21M M W ⋅==θ,其中θ为与直线的夹角.21M M 表示位移.另外,数量积还有满足交换律、分配律. 定理1.4 1)若,,b a 为任意两个向量,则⋅=⋅;2)若c b a ,,为任意三个向量,则()c b c a c b a ⋅+⋅=⋅+. 3)对于任意的常数λ,)()()(b a b a b a ⋅=⋅=⋅λλλ证明 只证明2),设{}321,,a a a =,{}321,,b b b =,{}321,,c c c =,那么cb c a c b c b c b c a c a c a c b c a c b c a c b c a c c c b a b a b a ⋅+⋅=+++++=+++++=⋅+++=⋅+)()(),,(),,()(332211332211333322221111321332211得证.对于向量、,它们的夹角为θθcos 为在上的投影,记为θcos Pr a b=.例1.6 设向量{}z y x a ,,=,求与三个坐标轴的夹角的余弦.解 以一般的记号,记z y x ,,轴的正方向的单位向量分别为{}0,0,1=i ,{}0,1,0=j ,{}1,0,0=k (以后还要用到),并令它们与向量的夹角分别是γβα,,,那么222cos zy x x ++==α;222cos zy x y ++==β;222cos zy x z ++==γ.从上面的例子可以很容易的看出:若称γβα,,为的方向角时,则向量的方向角γβα,,都满足:1cos cos cos 222=++γβα,并且x i=Pr ,y j=Pr ,z k=Pr ,为方便起见,称γβαcos ,cos ,cos 为的方向余弦.常用它们表示的方向.即a ∥{}γβαcos ,cos ,cos ,且方向相同,以上的概念结果完全可以推广到nR 中去,由读者自己推广.习 题1. 设{}{}{},2,3,-1-,0,-3,4,2,5,1===求下列向量的坐标: (1)c b 2 +-; (2)c 4b 23- ++;(3)c 2b 6+-.2. 已知平行四边形ABCD 中顶点A ,B ,C 的坐标分别为(1,0,2),(0,3,-1),(2,-1,3),求D 点以及对角线交点M 的坐标.3. 判断下列各组的两个向量是否垂直: (1) {}{};0,-3,4,2,5,1== (2) {}{}.0,3,3,1,-1,1== 4.设{}{}{},2,3,-1-,0,-3,4,2,5,1===计算下列值: (1)b ⋅a (2)c )(⋅+ (3)c⋅⋅)( (4) )(3⋅ 5. 下列等式是否正确(习惯上把a a ⋅记成2): (1)2||=, (2)(⋅)=b 2, (3)222)(=⋅ (4))()(⋅=⋅ 6. 设向量{}0,4,3=,求与三个坐标轴的夹角的余弦值.第五节 向量积为了研究两向量的另外一种运算——向量积,先介绍一下二、三阶行列式的定义. 定义 1.4 已知四个数22211211,,,a a a a ,用记号22211211a a a a (称为二阶行列式)表示数22211211a a a a ⋅-⋅。