图像处理实验报告
数字图像处理实验报告——图像分割实验

实验报告课程名称数字图像处理导论专业班级_______________姓名 _______________学号_______________电气与信息学院与谐勤奋求就是创新一.实验目得1.理解图像分割得基本概念;2.理解图像边缘提取得基本概念;3.掌握进行边缘提取得基本方法;4.掌握用阈值法进行图像分割得基本方法.二。
实验内容1.分别用Roberts,Sobel与拉普拉斯高斯算子对图像进行边缘检测。
比较三种算子处理得不同之处;2.设计一个检测图1中边缘得程序,要求结果类似图2,并附原理说明。
3.任选一种阈值法进行图像分割、图1 图2三.实验具体实现1.分别用Roberts,Sobel与拉普拉斯高斯算子对图像进行边缘检测。
比较三种算子处理得不同之处;I=imread(’mri、tif');imshow(I)BW1=edge(I,’roberts’);figure ,imshow(BW1),title(’用Roberts算子’)BW2=edge(I,’sobel’);figure,imshow(BW2),title(’用Sobel算子 ')BW3=edge(I,’log’);figure,imshow(BW3),title(’用拉普拉斯高斯算子’)比较提取边缘得效果可以瞧出,sober算子就是一种微分算子,对边缘得定位较精确,但就是会漏去一些边缘细节.而Laplacian—Gaussian算子就是一种二阶边缘检测方法,它通过寻找图象灰度值中二阶过零点来检测边缘并将边缘提取出来,边缘得细节比较丰富。
通过比较可以瞧出Laplacian-Gaussian算子比sober算子边缘更完整,效果更好。
2.设计一个检测图1中边缘得程序,要求结果类似图2,并附原理说明.i=imread('m83、tif’);subplot(1,2,1);imhist(i);title('原始图像直方图');thread=130/255;subplot(1,2,2);i3=im2bw(i,thread);imshow(i3);title('分割结果’);3.任选一种阈值法进行图像分割、i=imread('trees、tif’);subplot(1,2,1);imhist(i);title('原始图像直方图’);thread=100/255;subplot(1,2,2);i3=im2bw(i,thread);imshow(i3);title('分割结果’)1、分别用Roberts,Sobel与拉普拉斯高斯算子对图像进行边缘检测。
图像处理实验报告

图像处理实验报告图像处理实验报告一、引言图像处理是计算机科学与工程领域的一个重要研究方向,它涉及到对数字图像进行获取、处理、分析和显示等一系列操作。
本实验旨在通过使用图像处理技术,对一幅给定的数字图像进行处理和分析,以探索图像处理的原理和应用。
二、实验目的本实验有以下几个目的:1. 理解图像处理的基本概念和原理;2. 掌握图像处理的常用技术和方法;3. 熟悉图像处理软件的使用。
三、实验步骤1. 图像获取在本实验中,我们选择了一张风景图作为实验对象。
该图像是通过数码相机拍摄得到的,保存在计算机中的文件格式为JPEG。
我们使用图像处理软件将该图像导入到程序中,以便进行后续的处理和分析。
2. 图像预处理在进行图像处理之前,我们需要对图像进行预处理。
预处理的目的是去除图像中的噪声、平滑图像的边缘等。
我们使用了均值滤波和中值滤波两种常用的图像平滑方法。
通过对比两种方法的效果,我们可以选择合适的方法来进行图像预处理。
3. 图像增强图像增强是指通过一系列的操作,使得图像在视觉上更加鲜明、清晰、易于观察。
在本实验中,我们使用了直方图均衡化和灰度拉伸两种图像增强方法。
直方图均衡化通过对图像的像素值进行变换,使得图像的直方图更加均匀,从而增强图像的对比度。
灰度拉伸则是通过对图像的像素值进行线性变换,将图像的灰度范围拉伸到更广的范围内,从而增强图像的细节。
4. 图像分割图像分割是将图像分成若干个互不重叠的区域,每个区域具有一定的意义和特征。
在本实验中,我们使用了阈值分割和边缘检测两种图像分割方法。
阈值分割是指通过设置一个合适的阈值,将图像中的像素分为两个类别。
边缘检测则是通过检测图像中的边缘信息,将图像分割为不同的区域。
5. 图像特征提取图像特征提取是指从图像中提取出具有一定意义和特征的信息。
在本实验中,我们选择了纹理特征和颜色特征两种常用的图像特征提取方法。
纹理特征提取通过对图像的纹理进行分析,提取出图像的纹理特征。
数字图像处理实验报告 (图像编码)
实验三图像编码一、实验内容:用Matlab语言、C语言或C++语言编制图像处理软件,对某幅图像进行时域和频域的编码压缩。
二、实验目的和意义:1. 掌握哈夫曼编码、香农-范诺编码、行程编码2.了解图像压缩国际标准三、实验原理与主要框架:3.1实验所用编程环境:Visual C++6.0(简称VC)3.2实验处理的对象:256色的BMP(BIT MAP )格式图像BMP(BIT MAP )位图的文件结构:(如图3.1)图3.1 位图的文件结构具体组成图:单色DIB 有2个表项16色DIB 有16个表项或更少 256色DIB 有256个表项或更少 真彩色DIB 没有调色板每个表项长度为4字节(32位) 像素按照每行每列的顺序排列每一行的字节数必须是4的整数倍biSize biWidth biHeight biPlanes biBitCount biCompression biSizeImagebiXPelsPerMeter biYPelsPerMeter biClrUsedbiClrImportantbfType=”BM ” bfSizebfReserved1 bfReserved2 bfOffBits BITMAPFILEHEADER位图文件头 (只用于BMP 文件)BITMAPINFOHEADER位图信息头Palette 调色板DIB Pixels DIB 图像数据3.3 数字图像基本概念数字图像是连续图像(,)f x y 的一种近似表示,通常用由采样点的值所组成的矩阵来表示:(0,0)(0,1)...(0,1)(1,0)(1,1)...(1,1).........(1,0)(1,1)...(1,1)f f f M f f f M f N f N f N M -⎡⎤⎢⎥-⎢⎥⎢⎥⎢⎥----⎣⎦每一个采样单元叫做一个像素(pixel ),上式(2.1)中,M 、N 分别为数字图像在横(行)、纵(列)方向上的像素总数。
图像处理实验报告
图像处理实验报告实验⼀基于matlab 的⼈脸识别技术⼀、实验⽬的1.熟悉⼈脸识别的⼀般流程与常见识别⽅法;2.熟悉不同的特征提取⽅法在⼈脸识别的应⽤;3.了解在实际的⼈脸识别中,学习样本数等参数对识别率的影响;4.了解⾮⼈脸学习样本库的构建在⼈脸识别的重要作⽤。
使⽤MATLAB 平台编程,采⽤K-L 变换、特征提取及图像处理技术,实现⼈脸识别⼆、实验内容与实验仪器、设备1.构建⾮⼈脸学习样本库;2.观测不同的特征提取⽅法对⼈脸识别率的影响;3.观测不同的学习样本数对⼈脸识别率的影响;1. PC 机-系统最低配置 512M 内存、P4 CPU ;2. Matlab 仿真软件- 7.0 / 7.1 / 2006a 等版本的Matlab 软件。
3. CBCL ⼈脸样本库三、实验原理1.⼈脸特征提取的算法通过判别图像中所有可能区域是否属于“⼈脸模式”的⽅法来实现⼈脸检测。
这类⽅法有:特征脸法、⼈⼯神经⽹络法、⽀持向量机法;积分图像法。
本次使⽤的是PCA(主成分分析法)其原理是:利⽤K-L 变换抽取⼈脸的主要成分,构成特征脸空间,识别时将测试图像投影到此空间,得到⼀组投影系数,通过与各个⼈脸图像⽐较进⾏识别。
对于⼀幅M*N 的⼈脸图像,将其每列相连构成⼀个⼤⼩为D=M*N 维的列向量。
D 就是⼈脸图像的维数,即是图像空间的维数。
设n 是训练样本的数⽬;X j 表⽰第j 幅⼈脸图像形成的⼈脸向量,则所需样本的协⽅差矩阵为:1()()m Ti i i S x u x u ==--∑ (1)其中U 为训练样本的平均图像向量:11mi i u x n ==∑ (2)令A=[x 1-u,x 2-u,...x n -u],则有S r =AA T ,其维数为D ×D 。
根据K-L 变换原理,需要求得的新坐标系由矩阵AA T 的⾮零特征值所对应的特征向量组成。
直接计算的计算量⽐较⼤,所以采⽤奇异值分解(SVD)定理,通过求解A T A 的特征值和特征向量来获得AA T 的特征值和特征向量。
图像处理美工实验报告
图像处理美工实验报告1. 实验目的本次实验旨在通过图像处理技术,提升图片的美观度。
通过对图像进行调整、修复、美化等处理,使得图片在色彩、对比度、清晰度等方面表现出更好的效果。
2. 实验环境- 操作系统:Windows 10- 编程语言:Python- 开发环境:Anaconda Navigator- 相关软件:Adobe Photoshop3. 实验过程3.1 图片调整首先,我们使用Adobe Photoshop对原始图片进行调整。
通过调整图片的亮度、对比度、色调等参数,使得图片的整体效果更加明亮、鲜艳。
3.2 图像修复接着,我们使用图像处理库中的算法对图片进行修复。
通过去除噪点、消除瑕疵、修复缺失等操作,使得图片中的细节更加清晰、完整。
3.3 图像滤镜在调整和修复完成后,我们尝试使用不同的滤镜效果来美化图片。
通过施加不同的滤镜效果,例如模糊、锐化、马赛克等,我们可以给图片加入一些艺术效果,使得图片更加具有视觉冲击力。
3.4 图像细节增强为了使得图片更加饱满、立体,我们可以对图片中的细节部分进行增强处理。
通过增强细节的锐度、增加线条的清晰程度,我们可以使得图片中的物体更加鲜活、立体。
3.5 色彩调整最后,我们对图片的色彩进行调整。
通过调整图片的色相、饱和度、明度等参数,我们可以让图片的色彩更加丰富、鲜艳。
同时,我们可以对不同色彩通道进行调整,使得图片的整体色调更加协调、统一。
4. 实验结果经过一系列的图像处理操作,我们成功提升了图片的美观度。
原始图片与经过处理后的图片相比,色彩更加明亮饱满,细节更加清晰,整体效果更加出色。
同时,通过施加不同的滤镜效果和调整色彩,我们还加入了一些艺术效果,提升了图片的视觉冲击力。
5. 总结通过本次实验,我们了解了图像处理技术在美工方面的应用。
图像处理可以对图片进行调整、修复、美化等操作,提升其美观度和质量。
合理使用图像处理技术,可以使得图片更加生动、吸引人,为设计和美工工作提供了有力的支持。
数字图像处理实验一图像的基本操作和基本统计指标计算实验报告.doc
实验一图像的基本操作和基本统计指标计算一、实验目的熟悉MATLAB图像处理工具箱,在掌握MATLAB基本操作的基础上,本课程主要依靠图像处理工具箱验证和设计图像处理算法。
对于初学者来说,勤学多练、熟悉MATLAB图像处理工具箱也是学号本课程的必经之路。
了解计算图像的统计指标的方法及其在图像处理中的意义。
了解图像的几何操作,如改变图像大小、剪切、旋转等。
二、实验主要仪器设备(1)台式计算机或笔记本电脑(2)MATLAB(安装了图像处理工具箱,即Image Processing Toolbox(IPT))(3)典型的灰度、彩色图像文件三、实验原理(1)将一幅图像视为一个二维矩阵。
(2)利用MATLAB图像处理工具箱读、写和显示图像文件。
①调用imread函数将图像文件读入图像数组(矩阵)。
例如“I=imread(‘tire.tif’);”。
其基本格式为:“A=imread(‘filename.fmt’)”,其中,A为二维矩阵,filename.为文件名,fmt 为图像文件格式的扩展名。
②调用imwrite函数将图像矩阵写入图像文件。
例如“imwrite(A,’test_image.jpg’);”。
其基本格式为“imwrite(a,filename.fmt)”。
③调用imshow函数显示图像。
例如“imshow(‘tire.tif’);”。
其基本格式为:I为图像矩阵,N为显示的灰度级数,默认时为256。
(3)计算图像有关的统计参数。
四、实验内容(1)利用MATLAB图像处理工具箱和Photoshop读、写和显示图像文件。
(2)利用MATLAB计算图像有关的统计参数。
五、实验步骤(1)利用“读图像文件I/O”函数读入图像Italy.jpg。
(2)利用“读图像文件I/O”的iminfo函数了解图像文件的基本信息:主要包括Filename(文件名)、FileModDate(文件修改时间)、Filesize(文件尺寸)、Format(文件格式)、FormatVersion (格式版本)、Width(图像宽度)、Height(图像高度)、BitDepth(每个像素的位深度)、ColorType (彩色类型)、CodingMethod(编码方法)等。
数字图像处理图像变换实验报告
实验报告实验名称:图像处理姓名:刘强班级:电信1102学号:1404110128实验一图像变换实验——图像点运算、几何变换及正交变换一、实验条件PC机数字图像处理实验教学软件大量样图二、实验目的1、学习使用“数字图像处理实验教学软件系统”,能够进行图像处理方面的简单操作;2、熟悉图像点运算、几何变换及正交变换的基本原理,了解编程实现的具体步骤;3、观察图像的灰度直方图,明确直方图的作用与意义;4、观察图像点运算与几何变换的结果,比较不同参数条件下的变换效果;5、观察图像正交变换的结果,明确图像的空间频率分布情况。
三、实验原理1、图像灰度直方图、点运算与几何变换的基本原理及编程实现步骤图像灰度直方图就是数字图像处理中一个最简单、最有用的工具,它描述了一幅图像的灰度分布情况,为图像的相关处理操作提供了基本信息。
图像点运算就是一种简单而重要的处理技术,它能让用户改变图像数据占据的灰度范围。
点运算可以瞧作就是“从象素到象素”的复制操作,而这种复制操作就是通过灰度变换函数实现的。
如果输入图像为A(x,y),输出图像为B(x,y),则点运算可以表示为:B(x,y)=f[A(x,y)]其中f(x)被称为灰度变换(Gray Scale Transformation,GST)函数,它描述了输入灰度值与输出灰度值之间的转换关系。
一旦灰度变换函数确定,该点运算就完全确定下来了。
另外,点运算处理将改变图像的灰度直方图分布。
点运算又被称为对比度增强、对比度拉伸或灰度变换。
点运算一般包括灰度的线性变换、阈值变换、窗口变换、灰度拉伸与均衡等。
图像几何变换就是图像的一种基本变换,通常包括图像镜像变换、图像转置、图像平移、图像缩放与图像旋转等,其理论基础主要就是一些矩阵运算,详细原理可以参考有关书籍。
实验系统提供了图像灰度直方图、点运算与几何变换相关内容的文字说明,用户在操作过程中可以参考。
下面以图像点运算中的阈值变换为例给出编程实现的程序流程图,如下:2、图像正交变换的基本原理及编程实现步骤数字图像的处理方法主要有空域法与频域法,点运算与几何变换属于空域法。
图像处理实验报告
大学新闻与传播学院实验教学中心实验报告实验名称图像处理指导教师洪杰文华滢年级08 学号23 成绩一、预习部分1、实验目的2、实验基本原理3、主要仪器设备(含必要的元器件、工具)1、实验目的:(1)熟悉和掌握数字图像的基本概念和技术指标,掌握色彩模式、图像分辨率、图像深度、图像文件格式与图像的显示效果、文件容量的关系。
(2)了解和掌握数字图像压缩的概念,观察不同的压缩比对图像的影响。
(3)了解和掌握图像中色彩的确定及选取方法,掌握前景色和背景色的概念及调整方法,掌握色彩填充的基本概念及应用。
(4)了解和掌握图像处理软件Photoshop的基本功能和基本使用方法,熟练掌握图层与选择区的基本使用方法。
(5)通过创造性的构图和对布局及色彩等的巧妙处理,一幅好的图画可以将一个主题以含蓄而又深刻的方式予以提示,并往往具有比单纯的语言文字更强的表现力。
在掌握图像处理基本概念和Photoshop基本使用方法的基础上,对已有的数字图像做一些基本的创意设计和编辑处理。
2、实验基本原理:基于photoshop软件的图像处理。
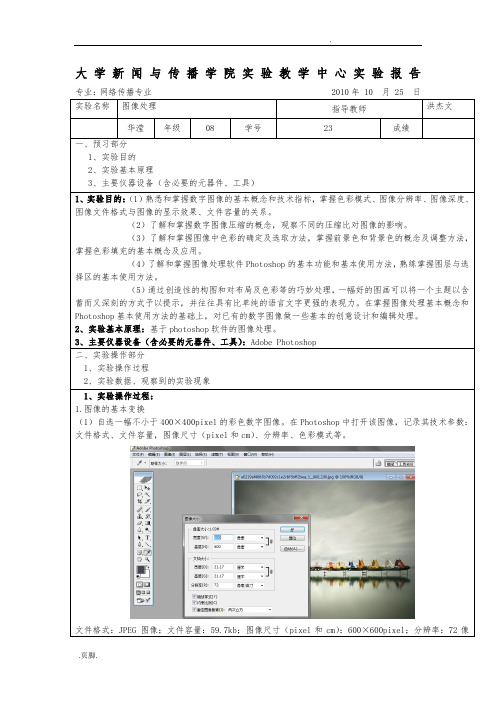
3、主要仪器设备(含必要的元器件、工具):Adobe Photoshop二、实验操作部分1、实验操作过程2、实验数据、观察到的实验现象1、实验操作过程:1.图像的基本变换(1)自选一幅不小于400×400pixel的彩色数字图像。
在Photoshop中打开该图像,记录其技术参数:文件格式、文件容量,图像尺寸(pixel和cm)、分辨率、色彩模式等。
文件格式:JPEG 图像;文件容量:59.7kb;图像尺寸(pixel和cm):600×600pixel;分辨率:72像素/英寸;色彩模式:RGB模式。
(2)对该图像重采样,要求采样后的图像分辨率为150dpi,图像尺寸为300×300pixel。
色彩模式分别变换成灰度、Indexed和RGB模式,按BMP格式分别保存成不同名称的图像文件;重新打开并观察变换后的显示效果,并记录各个文件的容量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2016 年春季学期研究生课程考核(读书报告、研究报告)考核科目:图像处理与分析学生所在院(系):理学院数学系学生所在学科:计算数学学生姓名:学号:导师:学生类别:考核结果阅卷人第 1 页 (共 27 页)1 实验目的过MATLAB 软件编程熟悉MATLAB 图像处理的一般过程,例如图像的导入,对源图像进行手动加各种噪声(高斯噪声、瑞丽噪声、伽马噪声、指数噪声、椒盐噪声),通过热传导方程,热传导逆方程,PM 模型,TV 模型,LAPLACE 模型,P_LAPLACE 模型,P(x)_LAPLACE 模型,在对图像进行处理的过程中引入Signal_Noise_Ratio (信噪比SNR )、Peak_Signal_Noise_Ratio (峰值信噪比PSNR )、Mean_Absolute_Error (绝对均差MAE )对处理后的图像质量进行评判。
2 实验原理2.1热传导方程模型Tikhonov 和Arsenin 提出如下模型:能量泛函22min ()||||2uE u u dx u f dx λΩΩ=∇+-⎰⎰其对应的Euler_Lagrange 方程0()|0dE u v d εεε=+= 由最速下降法求解可转化为如下的线性方程:(),(,)(0,)(,0),0,(,)(0,)duu u f x t T dt u x f x du x t T dnλ⎧=∆--∈Ω⨯⎪⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎩ 注意:在用最速下降法推导方程的过程中左端项应该为:0(),(,)(0,)(,0),0,(,)(0,)u u f x t T u x f x du x t T dnλ⎧⎪=∆--∈Ω⨯⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎩ 其中n 为外法向向量。
然而,当时间t 足够长时,上述两种形式方程等价,即后者是前者的稳定状态时的方程。
2.2热传导逆方程模型(),(,)(0,)(,0),0,(,)(0,)duu u f x t T dt u x f x du x t T dnλ⎧=-∆--∈Ω⨯⎪⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎩ 在时间足够长时,上述方程等价于:0(),(,)(0,)(,0),0,(,)(0,)u u f x t T u x f x du x t T dnλ⎧⎪=-∆--∈Ω⨯⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎩ 2.3 PM 模型((||))udiv C u u t∂=∇∇∂ 其中21C(s)1(/)s K =+该方程的局部坐标表达式为:2222||1()1||||(1())1()NN TT u u K U U u u t K K∇-∂=+∇∇∂++其中,U NN 为沿着等灰度水平线的法向N 的方向导数,U TT 为沿着等灰度水平线的切向T 的方向导数。
2.4 TV 模型Ridin ,Osher 和Fatemi 首次提出全变差(TV )模型2min ()||||2uE u u dx u f dx λΩΩ=∇+-⎰⎰其对应的Euler_Lagrange 方程:0()|0dE u v d εεε=+=有最速下降法求解可转化为如下的线性方程:2()(),(,)(0,)||(,0),0,(,)(0,)puu div u f x t T t u u x f x du x t T d nλ-∂∇⎧=--∈Ω⨯⎪∂∇⎪⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎪⎩ 注意:在用最速下降法推到方程的过程中左端项应该为:20()(),(,)(0,)||(,0),0,(,)(0,)p u div u f x t T u u x f x du x t T d n λ-∇⎧=--∈Ω⨯⎪∇⎪⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎪⎩其中n 为外法向向量。
2.5 P_Laplace 模型2min ()||||2p uE u u dx u f dx λΩΩ=∇+-⎰⎰其对应的Euler_Lagrange 方程:0()|0dE u v d εεε=+=有最速下降法求解可转化为如下的线性方程:2()(),(,)(0,)||(,0),0,(,)(0,)puu div u f x t T t u u x f x du x t T d nλ-∂∇⎧=--∈Ω⨯⎪∂∇⎪⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎪⎩ 注意:在用最速下降法推到方程的过程中左端项应该为:20()(),(,)(0,)||(,0),0,(,)(0,)p u div u f x t T u u x f x du x t T d nλ-∇⎧=--∈Ω⨯⎪∇⎪⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎪⎩ 其中n 为外法向向量。
然而,当时t 足够长时,上述两种形式方程等价,即后者是前者的稳定状态时的方程。
2.6 P(x)_Laplace 模型已知P_Laplace 模型2()(),(,)(0,)||(,0),0,(,)(0,)p uu div u f x t T t u u x f x du x t T d n λ-∂∇⎧=--∈Ω⨯⎪∂∇⎪⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎪⎩观察在P_Laplace 模型中的缺陷是:在计算过程中,参数P 的值是人们事先取定的,没有根据图像的实际特定进行更新,自然就联想到当P 的值随着处理图像位置的不同而进行更新,根据PM 模型和TV 模型的处理图像的特点,对于P_Laplace 模型知道如下事实:① 当p 趋近于1时,该模型的效果近似于TV 模型的结果; ② 当p 趋近于2时,该模型的效果近似于PM 模型的结果。
所以修改P_Laplace 模型如下:2()()(),(,)(0,)||(,0),0,(,)(0,)p x uu div u f x t T t u u x f x du x t T d n λ-∂∇⎧=--∈Ω⨯⎪∂∇⎪⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎪⎩其中n 为外法线方向2()0()(),(,)(0,)||(,0),0,(,)(0,)p x u div u f x t T u u x f x du x t T d n λ-∇⎧=--∈Ω⨯⎪∇⎪⎪=∈Ω⎨⎪⎪=∈∂Ω⨯⎪⎩2.7 信噪比、峰值信噪比、绝对均差原理1.峰值信噪比P eak_Signal_to_Noise_Ratio(PSNR)2.绝对均值Mean_Absolute_deviation_Error(MAE)3.信噪比Signal_to_Noise_Ratio(SNR)3 程序代码3.1 线性热方程clear all;close all; clc;Io=imread('lena.bmp'); %读入图像 if(ndims(Io)==3) %维数Io=rgb2gray(Io); %转成灰色 rgb 表示红绿蓝 endIo=double(Io);std_n=10; %高斯噪声标准差 var_n=std_n^2; %高斯噪声标准差 NI=randn(size(Io))*std_n;In=Io+NI; %在原图像上加噪声dt=0.25; %网比(一般对于n 维%dt<= (1/2)^n这样子差分方程%迭代才稳定)N=100; %迭代次数lambda=0; %lambda赋初值[Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAE J]=HeatEq(In,Io,dt,N,lambda); %方程迭代(热方程迭代)[MaxPSNR, Index1]=max(ALLPSNR)[MaxSNR, Index2]=max(ALLSNR)[MinMAE, Index3]=min(ALLMAE)Print(Io,In,J,Max_J1,Max_J2,Min_J3,ALLPSNR,ALLSNR,ALLMAE,N);3.2 反热方程模型clear all;close all;clc;Io=imread('pepper.bmp'); %读入图像if(ndims(Io)==3) %维数Io=rgb2gray(Io); %转成灰色 rgb表示红绿蓝endIo=double(Io);% % % %%% Add noise %%% % % %std_n=10; %高斯噪声标准差var_n=std_n^2; %高斯噪声标准差NI=randn(size(Io))*std_n; %产生一个随机矩阵,矩阵上的数服从标准正太分布;%使得服从标准差为给定的数的正态分布In=Io+NI;%%%%%%%% 反方程图像处理 %%%%%%%%%dt=-0.0001; %dt必须特别的小N=10; %迭代次数(需要逐渐增加)lambda=0.00;tic[Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAE J]=HeatEq(In,Io,dt,N,lambda);%方程迭代(热方程迭代)toc[MaxPSNR, Index1]=max(ALLPSNR)[MaxSNR, Index2]=max(ALLSNR)[MinMAE, Index3]=min(ALLMAE)Print(Io,In,J,Max_J1,Max_J2,Min_J3,ALLPSNR,ALLSNR,ALLMAE,N);热方程模型算法实现:function [Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAEJ]=HeatEq(In,Io,dt,N,lambda)J = In;Max_J1 = J;Max_J2 = J;Min_J3 = J;for i=1:NiDxxI=J([2:end end],:)+J([1 1:end-1],:)-2*J; %函数关于X方向求二阶偏导DyyI=J(:,[2:end end])+J(:,[1 1:end-1])-2*J; %函数关于Y方向求二阶偏导J=J+dt*(DxxI+DyyI)-lambda*(J-In); %迭代NowPSNR = psnr(uint8(J),Io) %调用psnr函数ALLPSNR(i)=NowPSNR;if i>1 && ALLPSNR(i-1) < ALLPSNR(i)Max_J1 = J;endNowSNR = snr(uint8(J),Io)ALLSNR(i) = NowSNR;if i>1 && ALLSNR(i-1) < ALLSNR(i)Max_J2 = J;endNowMAE = mae(uint8(J),Io)ALLMAE(i) = NowMAE;if i>1 && ALLMAE(i-1) > ALLMAE(i)Min_J3 = J;endend3.3 PM模型clear allclose allclcIo=imread('panda.png');% 读入一幅图像if(ndims(Io) == 3)Io = rgb2gray(Io);end;% 选择一个颜色矩阵,并且变成双浮点型的,这一步没有可能报错.Io=double(Io);std_n=20; % Gaussian noise standard deviationvar_n=std_n^2; % Gaussian noise standard deviationNI = randn(size(Io))*std_n; % White Gaussian noiseIn = Io + NI; % noisy input imageN =20;dt=0.25;K=13; %比例系数tic[Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAE J] = PM(Io,In,N,dt,K);toc[MaxPSNR, Index1]=max(ALLPSNR)[MaxSNR, Index2]=max(ALLSNR)[MinMAE, Index3]=min(ALLMAE)Print(Io,In,J,Max_J1,Max_J2,Min_J3,ALLPSNR,ALLSNR,ALLMAE,N);PM模型算法实现function [Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAE J] = PM(Io,In,N,dt,K)J = In;Max_J1 = J;Max_J2 = J;Min_J3 = J;for i=1:N;icn = J([1 1:end-1],:) - J;cs =J([2:end end],:) - J;cw = J(:, [1 1:end-1]) -J;ce =J(:, [2:end end]) - J;div = 1./(1+(abs(cn)/K).^2) .* cn...+ 1./(1+(abs(cs)/K).^2) .* cs...+ 1./(1+(abs(cw)/K).^2) .* cw...+ 1./(1+(abs(ce)/K).^2) .* ce;J= J+ dt * div;NowPSNR = psnr(uint8(J),Io) %调用psnr函数ALLPSNR(i)=NowPSNR;if i>1 && ALLPSNR(i-1) < ALLPSNR(i)Max_J1 = J;endNowSNR = snr(uint8(J),Io)ALLSNR(i) = NowSNR;if i>1 && ALLSNR(i-1) < ALLSNR(i)Max_J2 = J;endNowMAE = mae(uint8(J),Io)ALLMAE(i) = NowMAE;if i>1 && ALLMAE(i-1) > ALLMAE(i)Min_J3 = J;endend3.4 TV模型clear allclose allclcIo=imread('comic.jpg');% 读入一幅图像% 选择一个颜色矩阵,并且变成双浮点型的,这一步没有可能报错.if(ndims(Io) == 3)Io = rgb2gray(Io);end;Io=double(Io);% % % %%% Add noise %%% % % %std_n=20; % 高斯噪声比准差var_n=std_n^2; % 高斯噪声比准差NI = randn(size(Io))*std_n; % 白色高斯噪声In = Io + NI; % 把噪声加到原图上面N =100; %迭代图像dt=0.2; %网比(一般对于n维时,dt<=(1/2)^n这样子差分方程迭代才稳定)lambda=0.01; %给lambda赋初值tic[Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAE J] =TV(In,Io,dt,N,lambda,var_n);%调用函数toc[MaxPSNR, Index1]=max(ALLPSNR)[MaxSNR, Index2]=max(ALLSNR)[MinMAE, Index3]=min(ALLMAE)Print(Io,In,J,Max_J1,Max_J2,Min_J3,ALLPSNR,ALLSNR,ALLMAE,N);TV模型算法实现function [Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAEJ]=TV(In,Io,dt,N,lambda,var_n)J=In;Max_J1 = J;Max_J2 = J;Min_J3 = J;ep=0.0001;for i=1:NiDfJx=J([2:end end],:)-J; %函数关于X的一阶偏导(向后差分)DbJx=J-J([1 1:end-1],:); %函数关于X的一阶偏导(向前差分)DfJy=J(:,[2:end end])-J; %函数关于Y的一阶偏导(向后差分)DbJy=J-J(:,[1 1:end-1]); %函数关于Y的一阶偏导(向前差分)TempDJx=(ep+DfJx.*DfJx+((sign(DfJy)+sign(DbJy)).*min(abs(DfJy),abs(DbJy))./2).^ 2).^(1/2);%求梯度的模TempDJy=(ep+DfJy.*DfJy+((sign(DfJx)+sign(DbJx)).*min(abs(DfJx),abs(DbJx))./2).^ 2).^(1/2);DivJx=DfJx./TempDJx;DivJy=DfJy./TempDJy;% DivJx=DfJx./TempDJx^p;% DivJy=DfJy./TempDJy^p;%求散度Div=DivJx-DivJx([1 1:end-1],:)+DivJy-DivJy(:,[1 1:end-1]);% update lambda (fidelity term)lambda = max(mean(mean(Div.*(J-In)))./var_n,0)J= J+ dt * Div -dt*lambda*(J-In); %产生迭代NowPSNR = psnr(uint8(J),Io) %调用psnr函数ALLPSNR(i)=NowPSNR;if i>1 && ALLPSNR(i-1) < ALLPSNR(i)Max_J1 = J;endNowSNR = snr(uint8(J),Io)ALLSNR(i) = NowSNR;if i>1 && ALLSNR(i-1) < ALLSNR(i)Max_J2 = J;endNowMAE = mae(uint8(J),Io)ALLMAE(i) = NowMAE;if i>1 && ALLMAE(i-1) > ALLMAE(i)Min_J3 = J;endend3.5 P_Laplace模型clear allclose allclcIo=imread('fruit.jpg');% 读入一幅图像if(ndims(Io) == 3)Io = rgb2gray(Io);end;% 选择一个颜色矩阵,并且变成双浮点型的,这一步没有可能报错. Io=double(Io);% % % %%% Add noisestd_n=25; % Gaussian noise standard deviationvar_n=std_n^2; % Gaussian noise standard deviationNI = randn(size(Io))*std_n; % White Gaussian noiseIn = Io + NI; % noisy input imageN =50;dt=0.2;lambda=0.01;p_b=1.9;p_a=2.00; %% p_b<p<p_ap=p_a:(p_b-p_a)/(N-1):p_b;tic[Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAEJ]=P_laplace(In,Io,dt,N,p,lambda,var_n);toc[MaxPSNR, Index1]=max(ALLPSNR)[MaxSNR, Index2]=max(ALLSNR)[MinMAE, Index3]=min(ALLMAE)Print(Io,In,J,Max_J1,Max_J2,Min_J3,ALLPSNR,ALLSNR,ALLMAE,N);P_Laplace模型算法实现:function [Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAEJ]=P_laplace(In,Io,dt,N,p,lambda,var_n)J=In;Max_J1 = J;Max_J2 = J;Min_J3 = J;ep=0.0001;for i=1:NiDfJx=J([2:end end],:)-J; %函数关于X的一阶偏导(向后差分)DbJx=J-J([1 1:end-1],:); %函数关于X的一阶偏导(向前差分)DfJy=J(:,[2:end end])-J; %函数关于Y的一阶偏导(向后差分)DbJy=J-J(:,[1 1:end-1]); %函数关于Y的一阶偏导(向前差分)TempDJx=(ep+DfJx.*DfJx+((sign(DfJy)+sign(DbJy)).*min(abs(DfJy),abs(DbJy))./2).^ 2).^(1/2);%求梯度的模TempDJy=(ep+DfJy.*DfJy+((sign(DfJx)+sign(DbJx)).*min(abs(DfJx),abs(DbJx))./2).^ 2).^(1/2);DivJx=DfJx./TempDJx.^(2-p(i));DivJy=DfJy./TempDJy.^(2-p(i));Div=DivJx-DivJx([1 1:end-1],:)+DivJy-DivJy(:,[1 1:end-1]); %求散度lambda = max(mean(mean(Div.*(J-In)))./var_n,0) % update lambda (fidelity term)J= J+ dt * Div -dt*lambda*(J-In); %产生迭代NowPSNR = psnr(uint8(J),Io) %调用psnr函数ALLPSNR(i)=NowPSNR;if i>1 && ALLPSNR(i-1) < ALLPSNR(i)Max_J1 = J;endNowSNR = snr(uint8(J),Io)ALLSNR(i) = NowSNR;if i>1 && ALLSNR(i-1) < ALLSNR(i)Max_J2 = J;endNowMAE = mae(uint8(J),Io)ALLMAE(i) = NowMAE;if i>1 && ALLMAE(i-1) > ALLMAE(i)Min_J3 = J;endend3.6 P(x)_Laplace模型clear allclose allclcIo=imread('bird.jpg');% 读入一幅图像% 选择一个颜色矩阵,并且变成双浮点型的,这一步没有可能报错.if(ndims(Io) == 3)Io = rgb2gray(Io);end;Io=double(Io);% % % %%% Add noise %%% % % %std_n=20;var_n=std_n^2; % 高斯噪声比准差NI = randn(size(Io))*std_n; % 白色高斯噪声In = Io + NI; % 把噪声加到原图上面N =20; %迭代图像dt=0.2; %网比(一般对于n维时,dt<= (1/2)^n这样子差分方程迭代才稳定)lambda=0.01; %给lambda赋初值sigma = 2;k = 0.22;tic[Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAEJ]=Px_laplace(In,Io,dt,N,sigma,k,lambda,var_n); %调用函数toc[MaxPSNR, Index1]=max(ALLPSNR)[MaxSNR, Index2]=max(ALLSNR)[MinMAE, Index3]=min(ALLMAE)Print(Io,In,J,Max_J1,Max_J2,Min_J3,ALLPSNR,ALLSNR,ALLMAE,N);P(x)_Laplace模型算法实现:function [Max_J1 Max_J2 Min_J3 ALLPSNR ALLSNR ALLMAEJ]=Px_laplace(In,Io,dt,N,sigma,k,lambda,var_n)%得到图像大小[Ny,Nx]=size(Io);a=1;a1=1;b=1;b1=1;ep=0.00001;J = In;Max_J1 = J;Max_J2 = J;Min_J3 = J;for i=1:NiDfJx=J([2:end end],:)-J;DbJx=J-J([1 1:end-1],:);DfJy=J(:,[2:end end])-J;DbJy=J-J(:,[1 1:end-1]);Ng=ceil(6*sigma)+1;Gaussian = fspecial('gaussian',[Ng Ng],sigma);Is=conv2(J,Gaussian,'same');[IGx,IGy] = gradient(Is);NormGrad =IGx.^2 + IGy.^2;p=1;px=1- 1./ (1 + k* NormGrad.^p);TempDJx=(ep+DfJx.*DfJx+((sign(DfJy)+sign(DbJy)).*min(abs(DfJy),abs(DbJy))./2).^2).^(1/2);TempDJy=(ep+DfJy.*DfJy+((sign(DfJx)+sign(DbJx)).*min(abs(DfJx),abs(DbJx))./2).^2).^(1/2);DivJx=DfJx./TempDJx.^px;DivJy=DfJy./TempDJy.^px;Div=DivJx-DivJx([1 1:end-1],:)+DivJy-DivJy(:,[1 1:end-1]);lambda = max(mean(mean(Div.*(J-In)))./var_n,0) % update lambda (fidelity term) J= J+ dt * Div -dt*lambda*(J-In);NowPSNR = psnr(uint8(J),Io) %调用psnr函数ALLPSNR(i)=NowPSNR;if i>1 && ALLPSNR(i-1) < ALLPSNR(i)Max_J1 = J;endNowSNR = snr(uint8(J),Io)ALLSNR(i) = NowSNR;if i>1 && ALLSNR(i-1) < ALLSNR(i)Max_J2 = J;endNowMAE = mae(uint8(J),Io)ALLMAE(i) = NowMAE;if i>1 && ALLMAE(i-1) > ALLMAE(i)Min_J3 = J;endend附:(a)处理结果输出函数:function Print(Io,In,J,Max_J1,Max_J2,Min_J3,ALLPSNR,ALLSNR,ALLMAE,N)figure(1)subplot(2,2,1)imshow(Io,[]);title('原图像')subplot(2,2,2)imshow(In,[]);title('加噪声之后的图像')subplot(2,2,3)imshow(Io,[]);title('原图像')subplot(2,2,4)imshow(J,[]);title('处理结果')figure(2)subplot(2,2,1)imshow(Max_J1,[]);title('ALLPSNR值最大时图像')subplot(2,2,2)imshow(Max_J2,[]);title('ALLSNR值最大时图像')subplot(2,2,3)imshow(Min_J3,[]);title('ALLPMAE值最小时图像')subplot(2,2,4)imshow(J,[]);title('处理结果')x=1:N;figure(3)subplot(2,2,1)plot(x,ALLPSNR)title('ALLPSNR图像')subplot(2,2,2)plot(x,ALLSNR)title('ALLSNR图像')subplot(2,2,3)plot(x,ALLMAE)title('ALLPMAE图像')[Ny,Nx]=size(J);x=1:Nx;level=fix(Ny/2);y=J(level,:);y1=Io(level,:);y2=In(level,:);figure(4)subplot(2,1,1); plot(x,y,x,y1);title('SmoothImage And OriginalImage')subplot(2,1,2); plot(x,y,x,y1,x,y2);title('NoiseImage And OriginalImage')(b)图像处理评价指标代码(1)峰值信噪比实现代码如下:function s = snr(noisydata, original)%将noisydata,original转化为double型noisydata = double(noisydata);original = double(original);mean_original = mean(original(:));%求original的平均值tmp = original - mean_original;var_original = sum(sum(tmp.*tmp));%求original的方差noise = noisydata - original;%求noise的平均值mean_noise = mean(noise(:));tmp = noise - mean_noise;var_noise = sum(sum(tmp.*tmp));%求noise的的方差ifvar_noise == 0s = 999.99; %% INF. clean imageelses = 10 * log10(var_original / var_noise);%compute signal-to-noise-ratio (SNR) of a noisy signal/imageendreturn(2) 绝对均差实现代码如下:function E = mae(noisydata, original)%将noisydata,original转化为double型noisydata=double(noisydata);original=double(original);[m,n] = size(noisydata);noise = abs(noisydata - original);nostotal = sum(sum(noise));E=nostotal/(m*n);%compute root-mean-square-error (RMSE) of a noisy signal/imageReturn(3) 峰值信噪比实现代码如下:function s = psnr(noisydata, original)%将noisydata,original转化为double型noisydata=double(noisydata);original=double(original);[m,n] = size(noisydata);%获得noisydata矩阵的行数与列数peak=255*255*m*n;%计算峰值noise =noisydata - original;nostotal = sum(sum(noise.*noise));ifnostotal == 0s = 999.99; %% INF. clean imageelses = 10 * log10(peak./nostotal);%计算峰值性噪比endreturn4 实验结果4.1 线性热方程4.2 反热方程模型4.3 PM模型4.4 TV模型4.5 P_Laplace模型4.6 P(x)_Laplace模型5 总结分析对于线性热方程和反方程处理图像时,从处理结果可以知道,线性热方程模型处理的结果是使图像整个无差别的进行光滑,使得图像中的边界信息不能保持。