智能车 舵机控制和光电编码器测速
智能车测速模块设计(实用资料)

智能车测速模块设计(实用资料)(可以直接使用,可编辑欢迎下载)智能车测速模块设计测速模块设计2.2 速度检测方案小车的实际行驶速度是小车速度控制的控制输入量,准确实时的测量小车的速度才能实现小车的速度控制,即纵向控制。
常用的测速方案有以下几种:方案一:光电测速传感器原理是传感器开孔圆盘的转轴与转轴相连接,光源的光通过开孔盘的孔和缝隙反射到光敏元件上,开孔盘随旋转体转一周,光敏元件上照到光的次数等于盘上的开孔数,从而测出旋转体旋转速度。
灵敏度较高,但容易受外界光源影响。
方案二:测速发电机原理是将旋转机械能转化成电信号,适合于测量速度较高的旋转物体的速度。
采用电磁感应的原理。
但市场上测速发电机应用于低压市场的比较少,而且都比较重,不适用于模型车,并且要将侧速发电机安装到电动车上需要对电动车模型进行较大改动,由于其质量较重,可能会严重影响电动车的机动性能,除非自制。
优点是测速准确、稳定、快速,可以直接由AD 转换器读入单片机测得当前速度值。
图2-3 测速发电机方案三:霍尔传感器其工作原理是:利用霍尔开关元件测转速,内部具有稳压电路、霍尔电势发生器、放大器、施密特触发器和输出电路,其输出电平和TTL电平兼容。
在待测旋转体的转轴上装上一个圆盘,在圆盘上装上若干对小磁钢,小磁钢愈多分辨率越高。
霍尔开关固定在小磁钢附近,当旋转体以角速度M 旋转时,每当一个小磁钢转过霍尔开关,霍尔开关便输出一个脉冲,计算出单位时间的脉冲数,即可确定旋转体的速度。
方案选择论证:光电测速传感器受外界光源影响很大,不适合运动性物体的测速;测速发电机体积重量较大,不便于小车上安装;集成化霍尔开关传感器具有灵敏可靠、体积小巧、无触点、无磨损、使用寿命长、功耗低以及不怕尘土、油污、湿热等优点,综合小车运动环境和重量轻的要求,我们使用了霍尔传感器来进行速度检测。
我们在后轮上贴了N 个磁铁,轮子每转1/N 圈,霍尔元件就会输出一个脉冲,只要测量每两个脉冲之间的时间就可以知道当前车速。
测速编码器说明书
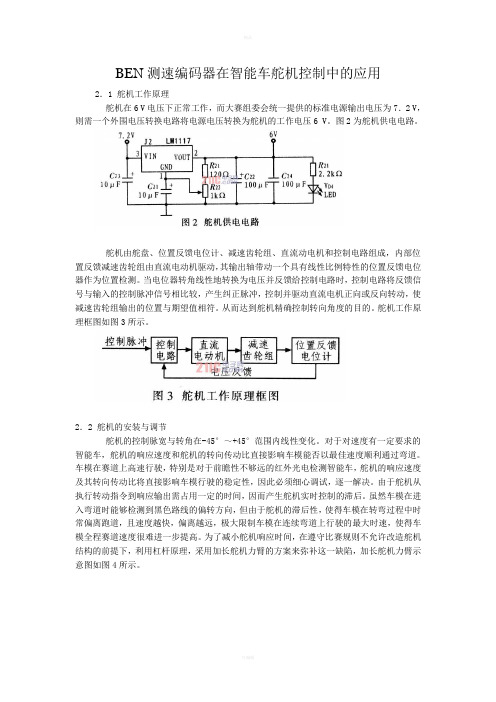
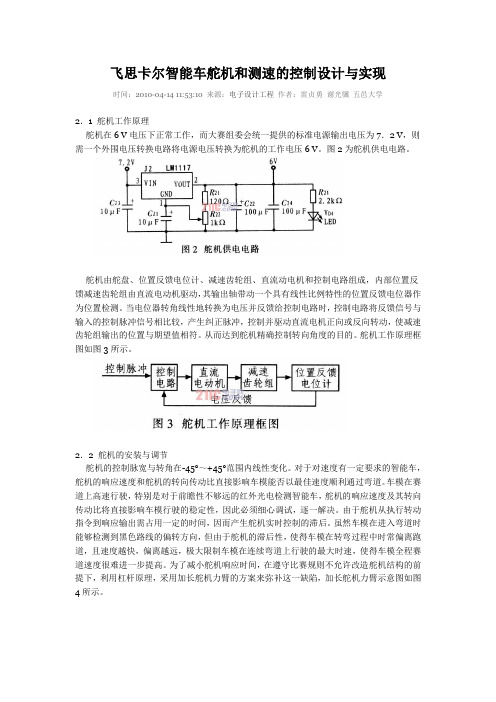
BEN测速编码器在智能车舵机控制中的应用2.1 舵机工作原理舵机在6 V电压下正常工作,而大赛组委会统一提供的标准电源输出电压为7.2 V,则需一个外围电压转换电路将电源电压转换为舵机的工作电压6 V。
图2为舵机供电电路。
舵机由舵盘、位置反馈电位计、减速齿轮组、直流动电机和控制电路组成,内部位置反馈减速齿轮组由直流电动机驱动,其输出轴带动一个具有线性比例特性的位置反馈电位器作为位置检测。
当电位器转角线性地转换为电压并反馈给控制电路时,控制电路将反馈信号与输入的控制脉冲信号相比较,产生纠正脉冲,控制并驱动直流电机正向或反向转动,使减速齿轮组输出的位置与期望值相符。
从而达到舵机精确控制转向角度的目的。
舵机工作原理框图如图3所示。
2.2 舵机的安装与调节舵机的控制脉宽与转角在-45°~+45°范围内线性变化。
对于对速度有一定要求的智能车,舵机的响应速度和舵机的转向传动比直接影响车模能否以最佳速度顺利通过弯道。
车模在赛道上高速行驶,特别是对于前瞻性不够远的红外光电检测智能车,舵机的响应速度及其转向传动比将直接影响车模行驶的稳定性,因此必须细心调试,逐一解决。
由于舵机从执行转动指令到响应输出需占用一定的时间,因而产生舵机实时控制的滞后。
虽然车模在进入弯道时能够检测到黑色路线的偏转方向,但由于舵机的滞后性,使得车模在转弯过程中时常偏离跑道,且速度越快,偏离越远,极大限制车模在连续弯道上行驶的最大时速,使得车模全程赛道速度很难进一步提高。
为了减小舵机响应时间,在遵守比赛规则不允许改造舵机结构的前提下,利用杠杆原理,采用加长舵机力臂的方案来弥补这一缺陷,加长舵机力臂示意图如图4所示。
图4中,R为舵机力臂;θ为舵机转向角度;F为转向所需外力;α为外力同力臂的夹角。
在舵机输出盘上增加长方形杠杆,在杠杆的末端固定转向传动连杆,其表达式为:加长力臂后欲使前轮转动相同角度时,在舵机角速度ω相同的条件下舵机力臂加长后增大了线速度v,最终使得舵机的转向角度θ减小。
智能车-舵机
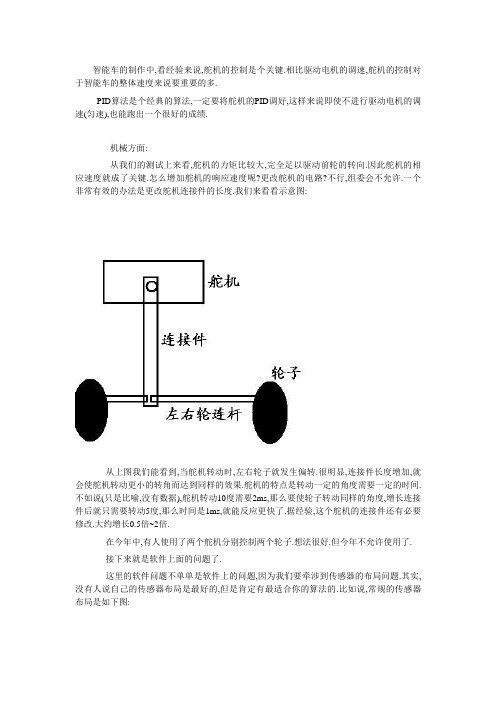
智能车的制作中,看经验来说,舵机的控制是个关键.相比驱动电机的调速,舵机的控制对于智能车的整体速度来说要重要的多.PID算法是个经典的算法,一定要将舵机的PID调好,这样来说即使不进行驱动电机的调速(匀速),也能跑出一个很好的成绩.机械方面:从我们的测试上来看,舵机的力矩比较大,完全足以驱动前轮的转向.因此舵机的相应速度就成了关键.怎么增加舵机的响应速度呢?更改舵机的电路?不行,组委会不允许.一个非常有效的办法是更改舵机连接件的长度.我们来看看示意图:从上图我们能看到,当舵机转动时,左右轮子就发生偏转.很明显,连接件长度增加,就会使舵机转动更小的转角而达到同样的效果.舵机的特点是转动一定的角度需要一定的时间.不如说(只是比喻,没有数据),舵机转动10度需要2ms,那么要使轮子转动同样的角度,增长连接件后就只需要转动5度,那么时间是1ms,就能反应更快了.据经验,这个舵机的连接件还有必要修改.大约增长0.5倍~2倍.在今年中,有人使用了两个舵机分别控制两个轮子.想法很好.但今年不允许使用了.接下来就是软件上面的问题了.这里的软件问题不单单是软件上的问题,因为我们要牵涉到传感器的布局问题.其实,没有人说自己的传感器布局是最好的,但是肯定有最适合你的算法的.比如说,常规的传感器布局是如下图:这里好像说到了传感器,我们只是略微的一提.上图只是个示意图,意思就是在中心的地方传感器比较的密集,在两边的地方传感器比较的稀疏.这样做是有好处的,大家看车辆在行驶到转弯处的情况:相信看到这里,大家应该是一目了然了,在转弯的时候,车是偏离跑道的,所以两边比较稀疏还是比较科学的,关于这个,我们将在传感器中在仔细讨论。
在说到接下来的舵机的控制问题,方法比较的多,有人是根据传感器的状态,运用查表法差出舵机应该的转角,这个做法简单,而且具有较好的滤波"效果",能够将错误的传感器状态滤掉;还有人根据计算出来的传感器的中心点(比如第四个和第五个传感器检测到黑线,中心点就是4.5),计算出舵机需要的转角,这个做法也比较的简单,但是必须有一个滤波的过程,必须要滤掉错误的传感器状态.比如说:现在传感器第四个,第五个和第11个检测到了黑线,显然第11个应该是个传感器检测错误.应该把它滤掉.关于这个如何滤波,我们待会在后面将进行讨论.还有人的做法就是采用PID算法,这个方法比较的好,其实也不是很难,就是PID参数整定的时候有些麻烦.大家可以自己选择喜欢的方法.关于滤波,有些许的方法:1.平均值排序法.这个方法大家肯定一听就知道是怎么回事.就是不急于执行,先多次检测被测传感器,累加,求平均值.这个方法不错,特别在单片机中.比如:你如果连续采集8次,累加,最后你只要右移三位(value=value>>3;)就是value=value/8的结果.毕竟,在单片机中,右移比除法要快嘛.2.中间值算法.这个算法也简单,顾名思义,就是取不大不小的中间的值.这个算法就需要把几次采集的值排序,然后使用中间的那个值.3.递推滤波.这个滤波方法比较的受认可,但是执行起来也有风险所在.先说这个算法,就是根据当前值(传感器的中心点所在值),推算接下来的传感器中心点的量,如果发现前后变化剧烈,就视为干扰因素,忽略.这个算法看起来比较的好.但是风险就在于:如果出现了错误,并且错误的中心点成为的当前值,那么以错误的中心点为基准,正确的中心点就成了干扰.这样就会出现极端情况.为了避免这个情况,我们应该有一个检查的模块,检查当前的中心点是否有效.这个检查,我们也许可以结合前面两种方法,在一定时间对中心点的有效性进行检查.4.限幅滤波.这个在舵机的控制中,特别是使用计算的方法获得PWM信号占空比的(用来控制舵机的转角),更是尤为重要.这个滤波的思路就是规定一个最大值和一个最小值,当计算出的值低于最小值时,令其等于最小值;大于最大值时,令其等于最大值.。
编码器测速
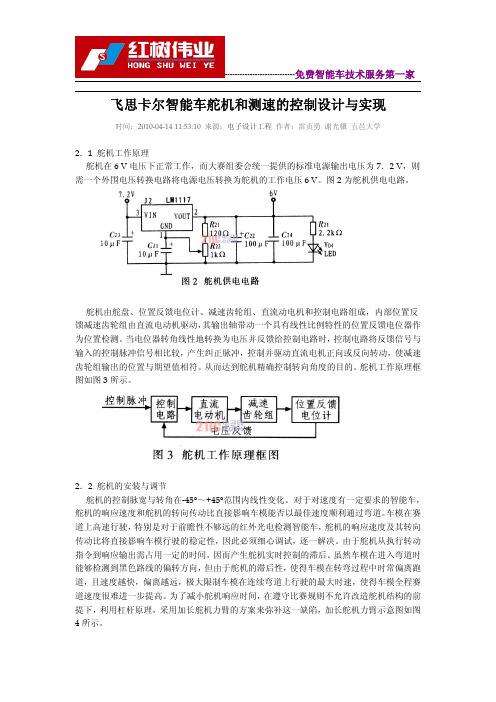
飞思卡尔智能车舵机和测速的控制设计与实现时间:2010-04-1411:53:10来源:电子设计工程作者:雷贞勇谢光骥五邑大学2.1舵机工作原理舵机在6V电压下正常工作,而大赛组委会统一提供的标准电源输出电压为7.2V,则需一个外围电压转换电路将电源电压转换为舵机的工作电压6V。
图2为舵机供电电路。
舵机由舵盘、位置反馈电位计、减速齿轮组、直流动电机和控制电路组成,内部位置反馈减速齿轮组由直流电动机驱动,其输出轴带动一个具有线性比例特性的位置反馈电位器作为位置检测。
当电位器转角线性地转换为电压并反馈给控制电路时,控制电路将反馈信号与输入的控制脉冲信号相比较,产生纠正脉冲,控制并驱动直流电机正向或反向转动,使减速齿轮组输出的位置与期望值相符。
从而达到舵机精确控制转向角度的目的。
舵机工作原理框图如图3所示。
2.2舵机的安装与调节舵机的控制脉宽与转角在-45°~+45°范围内线性变化。
对于对速度有一定要求的智能车,舵机的响应速度和舵机的转向传动比直接影响车模能否以最佳速度顺利通过弯道。
车模在赛道上高速行驶,特别是对于前瞻性不够远的红外光电检测智能车,舵机的响应速度及其转向传动比将直接影响车模行驶的稳定性,因此必须细心调试,逐一解决。
由于舵机从执行转动指令到响应输出需占用一定的时间,因而产生舵机实时控制的滞后。
虽然车模在进入弯道时能够检测到黑色路线的偏转方向,但由于舵机的滞后性,使得车模在转弯过程中时常偏离跑道,且速度越快,偏离越远,极大限制车模在连续弯道上行驶的最大时速,使得车模全程赛道速度很难进一步提高。
为了减小舵机响应时间,在遵守比赛规则不允许改造舵机结构的前提下,利用杠杆原理,采用加长舵机力臂的方案来弥补这一缺陷,加长舵机力臂示意图如图4所示。
图4中,R为舵机力臂;θ为舵机转向角度;F为转向所需外力;α为外力同力臂的夹角。
在舵机输出盘上增加长方形杠杆,在杠杆的末端固定转向传动连杆,其表达式为:加长力臂后欲使前轮转动相同角度时,在舵机角速度ω相同的条件下舵机力臂加长后增大了线速度v,最终使得舵机的转向角度θ减小。
智能车 舵机控制

智能车舵机控制章节一:引言智能车作为现代交通工具的重要发展方向之一,已经在自动驾驶、智能交通管理和车辆安全等领域取得了显著进展。
智能车的舵机控制系统是实现车辆精确转向的核心技术之一。
本论文旨在对智能车舵机控制技术进行探索和研究,以提高智能车辆的转向性能和安全性。
章节二:智能车舵机控制原理2.1 舵机工作原理舵机是一种能对自身位置进行控制并保持该位置的装置,通过电控系统可以精确控制舵机的转角。
其工作原理主要基于控制信号的宽度和频率来实现转动舵机。
舵机通过接收控制信号,根据信号的高低电平来判断舵机转动的方向,信号的脉宽则决定了舵机转动的角度。
2.2 舵机控制系统智能车的舵机控制系统主要由舵机、电机驱动器、传感器和控制器等组成。
舵机通过电机驱动器将电信号转换为机械运动,而传感器可以监测车辆的行驶状态和转向角度,从而向控制器提供反馈信号。
控制器根据传感器的反馈信号来调整舵机的转向角度,以实现精确的转向控制。
章节三:智能车舵机控制技术研究3.1 舵机位置控制算法舵机位置控制算法是智能车舵机控制的核心技术之一。
常用的舵机位置控制算法有PID控制、模糊控制和遗传算法等。
PID控制算法通过调整控制器的比例、积分和微分系数,使得舵机的转动角度与期望角度之间达到最优。
模糊控制算法则根据输入信号的模糊集合和输出信号的模糊集合之间的关系,来决定舵机的转动角度。
遗传算法则通过模拟生物遗传过程,优化算法的参数,以达到最优的控制效果。
3.2 舵机电机驱动器优化设计舵机电机驱动器的设计对于智能车舵机控制系统的稳定性和可靠性至关重要。
为了提高驱动器的效率,可以采用升级版的驱动器,如无刷电机驱动器。
无刷电机驱动器减少了传统电机驱动器的机械接触,减小了转动阻力,提高了驱动器的效率和寿命。
章节四:智能车舵机控制技术应用展望随着智能车技术的不断发展,舵机控制技术将广泛应用于自动驾驶和车辆安全等领域。
智能车舵机控制技术的应用展望主要包括以下几个方面:一是利用舵机控制技术实现车辆的自动转向,提高车辆的驾驶安全性;二是将舵机控制技术应用于自动泊车系统,实现车辆的精确泊车;三是通过舵机控制技术实现车辆的自适应巡航控制,提高车辆的舒适性和经济性。
一种基于光电编码器和matlab曲线拟合的测速

一种基于光电编码器和Matlab曲线拟合的测速方法作者:广东海洋大学电子信息工程系王嘉斌大家都知道,对于电机速度的测量方法有很多种,其中比较经典有M法测速、T法测速和MT法测速。
而在这里,我要介绍的是一种非常适合于飞思卡尔智能车的基于光电编码器的测速方法。
这里以200P/R的为例,它每转一周就会输出200个脉冲,通过单片机的脉冲捕捉功能就能检测到编码器输出的脉冲数。
众所周知,电机的转速是通过PWM的占空比来控制,想到这里,我们可以提出这样的一个疑问:既然占空比决定电机转速,而转速可以通过编码器输出的脉冲个数来表示,那么电机的PWM占空比跟编码器输出的脉冲个数是不是有某种必然的关系呢?答案是肯定的。
没错,占空比跟脉冲个数之间一定有种必然的关系!这种关系可能是线性的,也可能是非线性的。
在偏差允许的范围内,我们一般会选择线性的。
原因很简单,线性的让单片机计算起来肯定要快一些。
既然怀疑这两者之间有某种联系,那么我们就要想办法去找出它们之间的关系来。
首先,我们得先做一件事——测量。
通过测量不同占空比所对应的脉冲个数,再通过一定的数据处理(例如多次测量求平均值),得到两组对应的数据。
本人是通过先编写好程序,在程序中设置6种不同的速度值,即6种电机的PWM占空比值,然后通过每10ms的中断来读取编码器输出的脉冲个数。
因为都是10ms,所以每次读取到的脉冲个数都相差不大,最多差9个脉冲,为了减小测量误差,我取了4组数,然后对这4组数取平均值。
这样,就得到了一组电机PWM占空比跟编码器脉冲个数的数据。
对所得到的数据,我们可以借助Matlab这个强大的数学工具来处理。
主要用的是Matlab 的曲线拟合功能。
下面我将为大家介绍一下相关的操作步骤。
首先,我们把得到的占空比和脉冲个数以数组的形式输入到Matlab中(x代表占空比,y为脉冲个数):x=[100,200,300,400,500,600];y=[123,350,560,763,970,1206]; 然后再输入曲线拟合工具箱cftool(x,y)命令,此时Matlab会自动弹出一个新的窗口(如下图1)进入曲线拟合工具箱界面“Curve Fitting tool”后,按下面步骤操作:(1)点击“Data”按钮,弹出“Data”窗口;(2)利用X data和Y data的下拉菜单读入数据x,y,可修改数据集名“Data set name”,然后击“Create data set”按钮窗口,退出“Data”,返回工具箱界面,这时会自动画出数据集的曲线图(图2);图2(3)点击“Fitting”按钮,弹出“Fitting”窗口;(4)点击“New fit”按钮,可修改拟合项目名称“Fit name”,通过“Data set”下拉菜单选择数据集,然后通过下拉菜单“Type of fit”,选择拟合曲线的类型,在这里我们直接选择Polynomial:多形式逼近中的liner类型;(5)类型设置完成后,点击“Apply”按钮,就可以在Results框中得到拟合结果(图3)。
光电编码器实现小车测速探讨

光电编码器实现小车测速探讨编码器是一种测量对角位移的传感器,光电编码器属于众多编码器中的一类。
当前,光电编码器已被广泛应用于机电测控的各个行业,例如:旋转平台、机器人、导弹发射角度、织物记长、停床刀的定位等等。
针对光电编码器的原理,就其如何实现对小车速度的测量进行分析。
标签:光电编码器;原理;小车速度1、光电编码器的分类概述光电编码器分为增量式和绝对式两种类别。
其中,增量式光电编码器具有体积小、结构简单、精度高、价格低、性能稳定、影响速度快等优点,因此,相比于绝对式光电编码器具有更为广泛的应用。
在大量程角速度、大量程角位移和高分辨率的系统当中,增量式光电编码器的优势得到了更为充分的体现。
这样的装置成本高、结构复杂。
2、光电编码器的工作原理分析2.1增量式光电编码器工作原理分析增量式光电编码器是由主码盘、光学系统、鉴向盘和光电变换器构成的,在主码盘的周边刻有相等节距的辐射状窄缝,形成分布均匀的不透明区和透明区。
当工作时,鉴向盘保持静止,转轴和主码盘一同转动,这时光源发出的光就投射于鉴向盘和主码盘上,通过光敏原件的作用,将这种光信号转变成为脉冲信号,通过对脉冲信号的处理,向数控系统输出另一种脉冲信号,进而在数码管上直接显示出所测的位移量。
2.2绝对式光电编码器工作原理分析绝对式光电编码器是将被测角度通过对编码盘上图案信息的读取,直接转化成为相应的代码检测元件。
绝对式光电编码器的编码盘有接触式、光电式和电磁式三种。
光电元件通过接收不同码盘位置所产生的光信号,将其转化为相应的电信号,后经过整形放大,最终形成相应的数码电信号。
3、光电编码器测量小车速度3.1光电编码器测量小车速度的原理光电编码器是由一个红外发射接受装置和一个码盘构成。
当红外光由发射器射出,射于黑色条纹上时,将被间断地反射于接收器上,在接收器的输入端会受到通轮子转速为正比关系的光脉冲信号,进而在接收器的输出端形成具有一定频率的电信号。
再利用微处理器对电脉冲进行计算,就可以得到小车的移动速度。
光电编码器测速
飞思卡尔智能车舵机和测速的控制设计与实现时间:2010-04-14 11:53:10 来源:电子设计工程作者:雷贞勇谢光骥五邑大学2.1 舵机工作原理舵机在6 V电压下正常工作,而大赛组委会统一提供的标准电源输出电压为7.2 V,则需一个外围电压转换电路将电源电压转换为舵机的工作电压6 V。
图2为舵机供电电路。
舵机由舵盘、位置反馈电位计、减速齿轮组、直流动电机和控制电路组成,内部位置反馈减速齿轮组由直流电动机驱动,其输出轴带动一个具有线性比例特性的位置反馈电位器作为位置检测。
当电位器转角线性地转换为电压并反馈给控制电路时,控制电路将反馈信号与输入的控制脉冲信号相比较,产生纠正脉冲,控制并驱动直流电机正向或反向转动,使减速齿轮组输出的位置与期望值相符。
从而达到舵机精确控制转向角度的目的。
舵机工作原理框图如图3所示。
2.2 舵机的安装与调节舵机的控制脉宽与转角在-45°~+45°范围内线性变化。
对于对速度有一定要求的智能车,舵机的响应速度和舵机的转向传动比直接影响车模能否以最佳速度顺利通过弯道。
车模在赛道上高速行驶,特别是对于前瞻性不够远的红外光电检测智能车,舵机的响应速度及其转向传动比将直接影响车模行驶的稳定性,因此必须细心调试,逐一解决。
由于舵机从执行转动指令到响应输出需占用一定的时间,因而产生舵机实时控制的滞后。
虽然车模在进入弯道时能够检测到黑色路线的偏转方向,但由于舵机的滞后性,使得车模在转弯过程中时常偏离跑道,且速度越快,偏离越远,极大限制车模在连续弯道上行驶的最大时速,使得车模全程赛道速度很难进一步提高。
为了减小舵机响应时间,在遵守比赛规则不允许改造舵机结构的前提下,利用杠杆原理,采用加长舵机力臂的方案来弥补这一缺陷,加长舵机力臂示意图如图4所示。
图4中,R为舵机力臂;θ为舵机转向角度;F为转向所需外力;α为外力同力臂的夹角。
在舵机输出盘上增加长方形杠杆,在杠杆的末端固定转向传动连杆,其表达式为:加长力臂后欲使前轮转动相同角度时,在舵机角速度ω相同的条件下舵机力臂加长后增大了线速度v,最终使得舵机的转向角度θ减小。