简易机器人制作_图
《简易机器人制作》课件

本课程将教你如何制作一个简易机器人,学习电路组装、机器人程序编写和 机械部件设计等技能。
概述
电路组装
学会设计和组装机器人所需 的电路,掌握电子元件的连 接和布线。
机器人程序编写
学习编写机器人的程序,让 机器人具备自主操作和执行 任务的能力。
机械部件设计
了解机械部件的设计原理, 如机器人的动力系统和运动 机构。
所需材料
Arduino板
直流电机
舵机
蓝牙模块
步骤
1
硬件搭建
设计电路图,进行电路组装和机械部件的设计。
2
软件编写
搭建IDE环境,编写程Βιβλιοθήκη 实现蓝牙通信和红外遥控。3
调试
对电路和程序进行调试,确保机器人正常运行。
结论
通过本课程,您将掌握制作简易机器人的基本知识和技能,成为一个机器人制作的高手。
2024版幼儿园大班科学《机器人》PPT课件

2024/1/28
12
医疗服务中辅助诊断和手术操作
80%
辅助诊断
机器人可以通过医学影像技术协助 医生进行疾病诊断。
100%
手术操作
机器人可以精确执行手术操作,减 少医生手术过程中的疲劳和误差。
80%
康复训练
机器人可以帮助患者进行康复训练, 提高康复效果。
2024/1/28
13
军事领域无人侦察和作战平台
机器人技术作为创新教育工具,为孩子们提供了实践 和探索的空间,激发他们的创新思维。
通过搭建、编程和操控机器人,孩子们可以锻炼手眼 协调能力、空间想象能力和解决问题的能力。
机器人课程鼓励孩子们尝试不同的方法,培养他们的 发散性思维和创新能力。
2024/1/28
16
培养孩子们团队协作精神和竞争意识
在机器人竞赛中,孩子们可以 感受到竞争的压力,激发他们 的竞争意识,同时也可以学习 到如何面对失败和挫折。
无人侦察机
机器人可以执行复杂的侦察任 务,获取实时情报信息。
2024/1/28
作战平台
机器人可以搭载武器系统,执 行远程打击、火力支援等作战 任务。
排雷与救援
机器人可以在危险区域执行排 雷和救援任务,保障人员安全。
14
04
幼儿园教育中机器人技术应用
2024/1/28
15
提升孩子们创新能力和动手实践能力
执行器
根据控制器发出的指令,驱动 机器人完成各种动作。
电源
为机器人提供动力,确保机器 人正常工作。
2024/1/28
8
工作原理简介
感知环境
传感器感知外部环境信 息,如温度、光线、声
音等。
2024/1/28
100个科技小制作步骤大全科技小制作小发明方法图片教程◆肉丁儿童网
100个科技小制作步骤大全科技小制作小发明方法图片教程◆肉丁儿童网科技小制作儿童科技小制作的特点在于富含科技,结构简单、材料好找、加工容易等特点,能够培养学生们的创作能力、思维能力及动手能力。
肉丁儿童网为小朋友们提供各种实用的科技小发明制作方法及科技小制作图片大全,都有详细的制作步骤图解,相信一定能给你启发让你成为一名小发明家哦!简单的科技小制作地震声光报警器有趣的科技小制作图片教程简单发报机电子小制作永定县胡文虎小学科技小制作获奖作品展龙岩市胡文虎小学科技小制作获奖作品展科技小制作教你做会变色的雏菊永定县胡文虎小学低碳生活科技小制作获奖作品展手工科技小制作—装在瓶子里的春天小学生科学小制作鱼缸自动抽水机科技小制作步骤16个生活中很实用的简单科技小制作小学生科技小制作步骤微光小夜灯的制作教程阳能小风扇DIY电子科技小制作科技小制作教程自制太阳能小夜灯科技小制作模型可爱小火箭的做法自制简易风能模型儿童科技小制作教程儿童科技小制作的制作过程麻线缠绕台灯的做法手工DIY电子科技小制作用塑料桶做个小音箱教程用可乐瓶制作可以喷射的火箭模型原始喷射引擎科技小制作教儿童科技小制作的制作过程自动搅拌机的做法小学生科技手工制作磁性书签的做法奇思妙想科技手工制作冲天小飞箭、火箭模型的做法图解小学生科技小制作发光的纸萤火虫罐科技小制作,机械小制作步骤自制旋转蒸汽船科技小制作小发明简易机器人—机器蜂的制作方法儿童科技小制作指南针DIY 用钉子自制简易指南针的方法图科技小制作—用温度驾驭磁性的居里温度计试验科技小制作大全简单易作的电动走马灯儿童科技小制作教程自制夜视太阳镜方法图解自制迷你风力发电机儿童科技小制作教程自制撞针式电磁炮高年级科技小制作教程DIY 简易太阳能热水器模型科技小制作教程科技小制作自制超级望远镜的做法教程有趣的科技小制作定时炸弹模型的做法图解相关专辑:手工制作/环保小制作/小学生手工/橡皮泥/废品小制作/树叶拼图/蛋壳DIY /科技小制作/环保/儿童模型/包书皮/儿童剪纸/鸡蛋壳粘贴画/DIY 彩泥/科技小发明/物理小制作/DIY 风车/扭扭棒/幼儿园手工制作/科学小制作/1234>10 关于我们|交流合作|我要投稿|留言反馈。
地质出版社高中通用技术选修3:简易机器人制作机器人走直线、曲线练习
技术实验
请同学们进行多次试验,并将试验数据填 入下表。
二、机器人走曲线
机器人要到达平面上的任何一个点, 就必须能够进行旋转、转弯等曲线运动。
【功能】机器人前进(5s)——顺 时针旋转(2s)——后退(3s)——右 转弯前进(4s)——逆时针旋转 (3s)——左转弯后退(3s)——停车。
【要求】根据据图4-4的程序流 程图编写程序,运行程序并观察机器 人的运动状态。思考该程序使机器人 走什么样的曲线?
机器人走直线、曲线练习
ห้องสมุดไป่ตู้
一、机器人走直线
【功能】机器人前进10s后,再后退10s。
【要求】根据图4-3的程序流 程图编写程序,运行程序并观察 机器人运动状态。思考该程序使 机器人做什么运动?
讨论交流
在实验过程中,有些同学会 发现,机器人实际运动的轨迹和 程序设计的不一致。为什么会出 现这种情况?我们通过什么方法 可以纠正机器人走偏的问题?
讨论交流
在机器人原地旋转程序中, 知果两个轮子的转弯后退速度値 不一样,会出现什么结果?在转 弯程序中转弯孤度的大小是由什 么决定的?
技术实验
请同学们进行多次试验,并将试验数据填 入下表。
谢谢
2024年度-机器人教学课件(共26张PPT)pptx

介绍了机器人常用传感器类型、 工作原理及在机器人感知中的应 用。
机器人自主导航与定位
阐述了机器人自主导航的基本原 理、定位方法及SLAM技术。
机器人基本概念与分类
机器人操作系统与编程
介绍了机器人的定义、发展历程 、分类及应用领域。
介绍了ROS的基本概念、功能特 点、常用命令及编程实践。
32
学生自我评价报告分享
第三代机器人
智能型机器人,具备自主 学习和决策能力,能够适 应复杂环境和任务。
5
未来趋势展望
人机协作
随着人工智能技术的发展,未来 机器人将更加注重与人类的协作 ,共同完成任务。
应用领域拓展
随着技术进步和应用需求增加, 机器人将在更多领域得到应用, 如医疗、教育、娱乐等。
自主化
机器人将具备更高的自主性和智 能化水平,能够独立完成复杂任 务。
以促进课程的不断完善和提高。
33
下一步学习计划和资源推荐
深入学习机器人相关领域知识
鼓励学生继续深入学习机器人相关领域知识,如机器视觉、深度学习在机器人中的应用等 。
参加机器人竞赛和项目实践
推荐学生参加各类机器人竞赛和项目实践,锻炼自己的实践能力和团队协作能力。
利用在线资源进行自主学习
推荐学生利用MOOCs、在线实验室等资源进行自主学习和实践操作,提高自己的学习效 果和兴趣。
01
学习成果展示
通过课程学习,学生能够掌握机器人基本概念、运动学与控制、传感器
与感知、自主导航与定位等关键知识点,并具备一定的实践操作能力。
02
学习方法分享
学生可以采用多种学习方法,如课前预习、课后复习、小组讨论、实践
操作等,以提高学习效果和兴趣。
简单的机器人制作教程
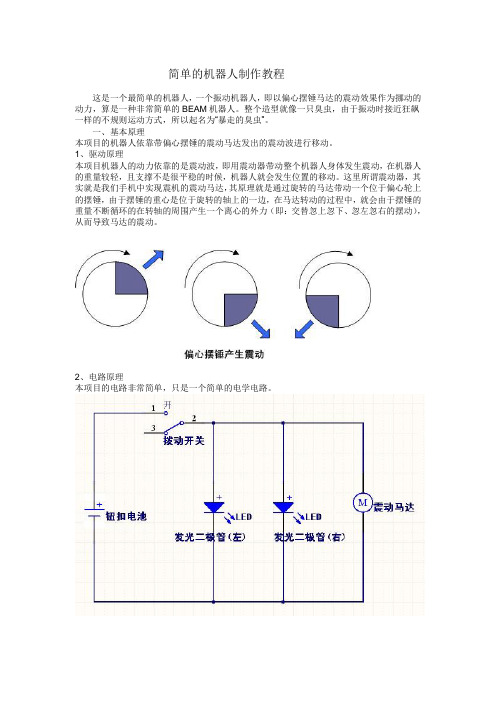
简单的机器人制作教程这是一个最简单的机器人,一个振动机器人,即以偏心摆锤马达的震动效果作为挪动的动力,算是一种非常简单的BEAM机器人。
整个造型就像一只臭虫,由于振动时接近狂飙一样的不规则运动方式,所以起名为“暴走的臭虫”。
一、基本原理本项目的机器人依靠带偏心摆锤的震动马达发出的震动波进行移动。
1、驱动原理本项目机器人的动力依靠的是震动波,即用震动器带动整个机器人身体发生震动,在机器人的重量较轻,且支撑不是很平稳的时候,机器人就会发生位置的移动。
这里所谓震动器,其实就是我们手机中实现震机的震动马达,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。
2、电路原理本项目的电路非常简单,只是一个简单的电学电路。
这里我们采用类似电子表所使用的微型钮扣电池作为机器人的能源;采用手机震机用的震动马达作为动力源;采用LED发光二极管作为发光的眼睛;而控制控制机器人启动的开关则是选择一般的小型选择拨动开关。
需要注意的是,一般的选择拨动开关有三个引脚,其中拨动开关可以使中间的引脚(上图之2)有选择的接通两边(上图之1和3)任意一侧的其中一个引脚。
同时,用于做眼睛发光的LED发光二极管的引脚是区分正负极的。
另外提一下,LED发光二极管是有一个启辉电压的,大概是2V多左右,只有供电的电压达到这个值时发光管才会发光。
本项目中,是使用了两只发光二极管作为眼睛的。
机器人开始启动的时候,发光二极管是会发光的,当发现其不亮的时候,就是说明电池的电能已经消耗了不少,电池的电压已经下降到发光二极管无法点亮的程度,这种时候震动马达还是会继续震动的。
因为震动马达启动的电压并不高,在电池的电压已经下降了很多的程度下震动马达还是可以继续工作。
其中注意:1、拨动开关选用1、2两个引脚;2、LED发光二极管的引脚是区分正负极的,要对应连接到电池的正负电极(下面有说明判别的方法);3、钮扣电池的外壳,只有一面金属部分的是负极,整个包住周围以及其中一面的金属部分是正极(见下图所示)。
机器人制作教程

两年前,爸爸给我买了套机器人组合套件,希望我在进入小学高年级之前掌握基本的机器人知识。
去年暑假爸爸辅导我阅读《简易机器人制作(zhìzuò)》(江苏教育)一书,开始学习认识机器人,掌握初级的计算机控制和简单的机械知识。
这个寒假我利用所掌握的知识,在爸爸指导下,开始实际制作一个简单的完整模型——智能机器人小车。
一、小车功能(gōngnéng)介绍智能机器人小车可独立(dúlì)完成4个功能:1、小车(xiǎochē)碰壁拐弯——小车在行进过程中碰到障碍物倒退拐弯并继续前行;2、小车悬崖回头——小车在浅色水平桌面行进(xíngjìn),探测到行进方向是桌子边沿时停步并转弯回头;3、小车边走边唱——小车在行进过程中播放音乐;4、小车走8字——小车按照8字的形状行走;二、设计思路最初爸爸找到一个类似范例,但由于结构件不同,而且没有源程序,我们参考了这个范例的结构和功能,经过独立思考,多次实验调测,完成这个小车的制作。
1、确定任务依照不同程序,能够分别使小车完成碰壁拐弯、边走边唱、悬崖回头和走8字。
2、确定总方案根据任务确定智能小车所需完成的动作,小车需要具备探测障碍物、探测桌面边沿(biānyán)、以及相应需要完成的前进、后退、拐弯、唱歌这些动作。
3、结构设计结构设计成有两个电机分别控制两个后轮,前轮使用一个万向轮,另外需要一个接触传感器和一个双光反射传感器。
结构上需要将接触传感器触点放在小车最前端,双光反射传感器设在接触传感器稍微靠后的位置,面向地面,距地面8-10mm。
结构设计中的难点是万向轮很容易卡住,连接线不够(bùgòu)长影响控制板安装位置。
4、控制电路设计(shèjì)控制电路要设计成让传感器(接触传感器、光反射传感器)判断有没有信号,然后(ránhòu)确定两个电机正转或反转,实现小车前进、后退和拐弯这些动作。
简易机器人制作方法
简易机器人制作方法
制作一个简易机器人的方法有多种,以下为一种简单的方法:
材料:
1. 一个空的饮料瓶
2. 两个小型电动振动马达
3. 两个小型齿轮
4. 一些线材
5. 一个电池盒
6. 一个开关
7. 一些纸板、胶带和胶水
步骤:
1. 首先将两个电动振动马达固定在饮料瓶的底部,以使它们平衡地旋转。
2. 使用胶带将齿轮固定在振动马达的轴上,并确保两个齿轮彼此咬合。
3. 在饮料瓶的一侧剪一个小口,将电池盒通过该口固定在饮料瓶上,并将电池连接到振动马达。
4. 在饮料瓶的另一侧剪一个小口,将开关通过该口固定在饮料瓶上,并将开关连接到电池和振动马达。
5. 制作机器人的身体部分,可以使用纸板制作一个简单的身体框架,然后用纸板制作头部和四肢,并使用胶水将它们固定在身体框架上。
6. 将头部部分固定在饮料瓶的顶部,并确保头部可以自由旋转。
7. 使用胶水将身体框架固定在饮料瓶的底部,以使机器人稳定地站立。
8. 根据需要,您可以为机器人设计和添加其他功能,例如眼睛、嘴巴等。
请注意,这只是一个简易机器人的基本制作方法,您可以根据自己的想法和兴趣进一步改进和定制机器人的功能和外观。