相位噪声性能测试
jitter抖动(相位噪声)的概念及其测量方法(EyeDiagram)
抖动的概念及其测量方法摘要:在数字通信系统,特别是同步系统中,随着系统时钟频率的不断提高,时间抖动成为影响通信质量的关键因素。
本文介绍了时间抖动(jitter)的概念及其分析方法。
关键字:时间抖动、jitter、相位噪声、测量一、引言随着通信系统中的时钟速率迈入GHz级,抖动这个在模拟设计中十分关键的因素,也开始在数字设计领域中日益得到人们的重视。
在高速系统中,时钟或振荡器波形的时序误差会限制一个数字I/O接口的最大速率。
不仅如此,它还会导致通信链路的误码率增大,甚至限制A/D转换器的动态范围。
有资料表明在3GHz 以上的系统中,时间抖动(jitter)会导致码间干扰(ISI),造成传输误码率上升。
在此趋势下,高速数字设备的设计师们也开始更多地关注时序因素。
本文向数字设计师们介绍了抖动的基本概念,分析了它对系统性能的影响,并给出了能够将相位抖动降至最低的常用电路技术。
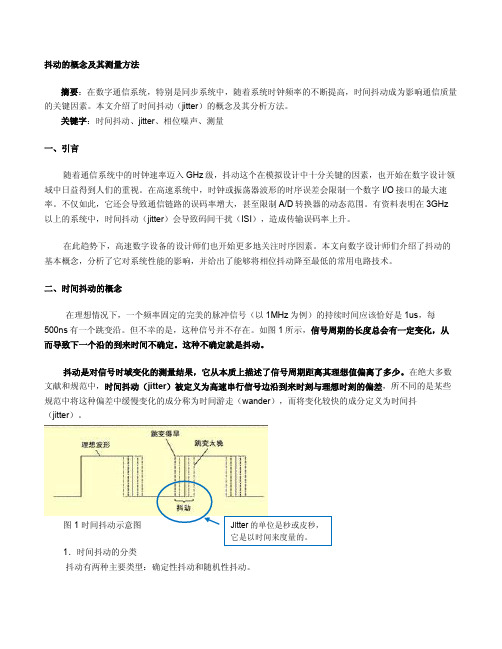
二、时间抖动的概念在理想情况下,一个频率固定的完美的脉冲信号(以1MHz为例)的持续时间应该恰好是1us,每500ns有一个跳变沿。
但不幸的是,这种信号并不存在。
如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。
这种不确定就是抖动。
抖动是对信号时域变化的测量结果,它从本质上描述了信号周期距离其理想值偏离了多少。
在绝大多数文献和规范中,时间抖动(jitter)被定义为高速串行信号边沿到来时刻与理想时刻的偏差,所不同的是某些规范中将这种偏差中缓慢变化的成分称为时间游走(wander),而将变化较快的成分定义为时间抖(jitter)。
图1 时间抖动示意图1.时间抖动的分类抖动有两种主要类型:确定性抖动和随机性抖动。
确定性抖动是由可识别的干扰信号造成的,这种抖动通常幅度有限,具备特定的(而非随机的)产生原因,而且不能进行统计分析。
随机抖动是指由较难预测的因素导致的时序变化。
例如,能够影响半导体晶体材料迁移率的温度因素,就可能造成载子流的随机变化。
脉冲调制信号相位噪声测试
脉冲调制信号相位噪声测试方法安捷伦科技有限公司技术指南相位噪声参数是评估连续波信号频率短期稳定度的重要指标,相位噪声性能的好坏会对电子系统的整体性能有重要影响,例如雷达系统的作用距离,目标分辨率,数字通信系统的误码率等都和系统频率源的相位噪声有关。
在雷达系统和TDMA系统中,发射的信号都为脉冲形式的突发信号,测试中需要在系统的工作状态下进行频率源性能测试,这就要求在脉冲调制状态下测试频率源输出信号的相位噪声。
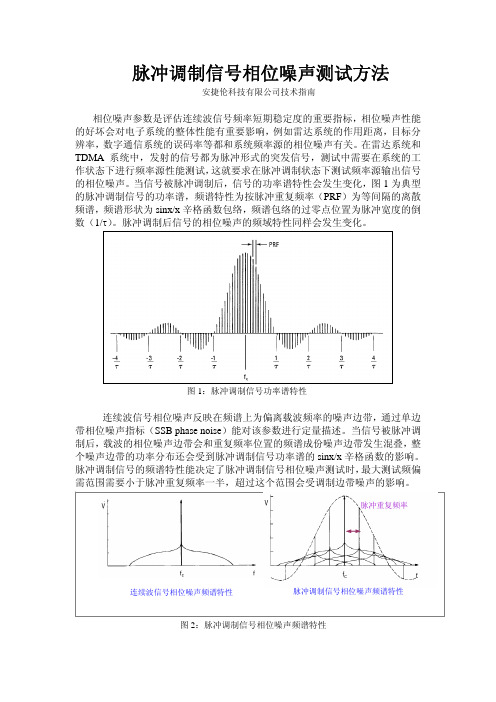
当信号被脉冲调制后,信号的功率谱特性会发生变化,图1为典型的脉冲调制信号的功率谱,频谱特性为按脉冲重复频率(PRF)为等间隔的离散频谱,频谱形状为sinx/x辛格函数包络,频谱包络的过零点位置为脉冲宽度的倒数(1/τ)。
脉冲调制后信号的相位噪声的频域特性同样会发生变化。
图1:脉冲调制信号功率谱特性连续波信号相位噪声反映在频谱上为偏离载波频率的噪声边带,通过单边带相位噪声指标(SSB phase noise)能对该参数进行定量描述。
当信号被脉冲调制后,载波的相位噪声边带会和重复频率位置的频谱成份噪声边带发生混叠,整个噪声边带的功率分布还会受到脉冲调制信号功率谱的sinx/x辛格函数的影响。
脉冲调制信号的频谱特性能决定了脉冲调制信号相位噪声测试时,最大测试频偏需范围需要小于脉冲重复频率一半,超过这个范围会受调制边带噪声的影响。
脉冲重复频率连续波信号相位噪声频谱特性脉冲调制信号相位噪声频谱特性图2:脉冲调制信号相位噪声频谱特性连续波信号相位噪声时域特性脉冲调制信号相位噪声时域特性图3:脉冲调制信号相位噪声的时域特性相对连续波形式点频信号相位噪声测试,脉冲调制形式的信号相位噪声测试需要测试仪表具备相应的能力来完成测试,针对脉冲调制信号相位噪声的测试要求,工程上可以采用鉴相法和频谱分析仪测试方法来测试脉冲调制信号的相位噪声。
这两种方法测试原理不同,可以适应不同类型和脉冲参数的被测试频率源的测试要求。
表格1给出这两种脉冲调制信号相位噪声测试方法的技术特点说明。
dds测试标准
DDS测试标准
一、概述
DDS(Direct Digital Synthesizer)是一种基于数字信号处理技术的频率合成器。
为了确保DDS的输出信号质量满足要求,需要对DDS进行一系列的测试。
本测试标准主要包含两个方面:输出信号质量测试和相位和频率调制测试。
二、输出信号质量测试
1.频率稳定度测试
在规定时间内,记录DDS的输出频率变化,以评估其频率稳定度。
一般来说,频率稳定度应优于±1×10-6。
2.相位噪声测试
在规定带宽内,测量DDS输出信号的相位噪声,以评估其性能。
一般来说,相位噪声应优于-80 dBc/Hz。
3.杂散抑制测试
在规定带宽内,测量DDS输出信号的杂散抑制能力,以评估其性能。
一般来说,杂散抑制能力应优于-70 dBc。
4.谐波失真测试
测量DDS输出信号的谐波失真,以评估其性能。
一般来说,谐波失真应优于-70 dBc。
三、相位和频率调制测试
1.频率调制测试
在规定的调制频率和调制指数下,测量DDS输出信号的频率调制性能,以评估其性能。
一般来说,频率调制性能应优于±0.1 dB。
2.相位调制测试
在规定的调制频率和调制指数下,测量DDS输出信号的相位调制性能,以评估其性能。
一般来说,相位调制性能应优于±0.1 dB。
以上是DDS测试标准的概述,具体测试方法需根据具体的设备参数和测试条件进行调整。
在进行测试时,应遵循相关的测试规程和安全规范,以保证测试结果的准确性和可靠性。
相噪仪测量相位噪声的方法
相噪仪测量相位噪声的方法摘要:一、相噪仪概述二、相位噪声的测量方法1.测量原理2.测量步骤3.测量注意事项三、相噪仪在实际应用中的重要性四、未来发展趋势与应用前景正文:一、相噪仪概述相噪仪,又称相位噪声测试仪,是一种用于测量电子设备或系统相位噪声的仪器。
相位噪声是指信号相位的随机变化,它在通信、雷达、导航等领域具有重要的应用价值。
相噪仪的工作原理是通过检测被测信号的相位变化,从而得到其相位噪声特性。
相噪仪在我国科研、生产和应用领域发挥着重要作用,对于提高无线电设备的性能和可靠性具有重要意义。
二、相位噪声的测量方法1.测量原理相位噪声的测量原理主要基于相位敏感检测技术。
相位敏感检测器(PSD)是一种常用的传感器,它能将信号的相位变化转换为电压信号。
在测量过程中,将被测信号与参考信号进行相位比较,得到相位差信号。
通过分析相位差信号的统计特性,可以得到相位噪声的功率谱密度(PSD)。
2.测量步骤(1)连接被测信号和参考信号:将信号输入到相噪仪,并连接参考信号源。
(2)设置参数:根据被测信号的频率范围和噪声特性,设置相噪仪的相关参数,如带宽、积分时间等。
(3)开始测量:启动相噪仪,进行自动测量。
(4)读取数据:测量完成后,读取相位噪声的PSD曲线。
3.测量注意事项(1)确保被测信号和参考信号的质量,避免引入测量误差。
(2)在测量过程中,避免电磁干扰和振动影响。
(3)合理设置相噪仪的参数,以获得较高的测量精度。
三、相噪仪在实际应用中的重要性相噪仪在通信、雷达、导航等领域的实际应用具有重要意义。
通过测量和分析相位噪声,可以评估无线电设备的性能,如稳定性和可靠性。
此外,相噪仪还可用于优化系统设计,提高信号传输质量和接收灵敏度。
在工程实践中,相噪仪为无线电设备的研发和生产提供了有力保障。
四、未来发展趋势与应用前景随着科技的不断发展,对无线电设备性能的要求越来越高。
未来,相噪仪将朝着更高精度、更宽频率范围、更多功能的方向发展。
相位噪声基础及测试原理和方法
摘要:相位噪声指标对于当前的射频微波系统、移动通信系统、雷达系统等电子系统影响非常明显,将直接影响系统指标的优劣。
该项指标对于系统的研发、设计均具有指导意义。
相位噪声指标的测试手段很多,如何能够精准的测量该指标是射频微波领域的一项重要任务。
随着当前接收机相位噪声指标越来越高,相应的测试技术和测试手段也有了很大的进步。
同时,与相位噪声测试相关的其他测试需求也越来越多,如何准确的进行这些指标的测试也愈发重要。
1、引言随着电子技术的发展,器件的噪声系数越来越低,放大器的动态范围也越来越大,增益也大有提高,使得电路系统的灵敏度和选择性以及线性度等主要技术指标都得到较好的解决。
同时,随着技术的不断提高,对电路系统又提出了更高的要求,这就要求电路系统必须具有较低的相位噪声,在现代技术中,相位噪声已成为限制电路系统的主要因素。
低相位噪声对于提高电路系统性能起到重要作用。
相位噪声好坏对通讯系统有很大影响,尤其现代通讯系统中状态很多,频道又很密集,并且不断的变换,所以对相位噪声的要求也愈来愈高。
如果本振信号的相位噪声较差,会增加通信中的误码率,影响载频跟踪精度。
相位噪声不好,不仅增加误码率、影响载频跟踪精度,还影响通信接收机信道内、外性能测量,相位噪声对邻近频道选择性有影响。
如果要求接收机选择性越高,则相位噪声就必须更好,要求接收机灵敏度越高,相位噪声也必须更好。
总之,对于现代通信的各种接收机,相位噪声指标尤为重要,对于该指标的精准测试要求也越来越高,相应的技术手段要求也越来越高。
2、相位噪声基础2.1、什么是相位噪声相位噪声是振荡器在短时间内频率稳定度的度量参数。
它来源于振荡器输出信号由噪声引起的相位、频率的变化。
频率稳定度分为两个方面:长期稳定度和短期稳定度,其中,短期稳定度在时域内用艾伦方差来表示,在频域内用相位噪声来表示。
2.2、相位噪声的定义以载波的幅度为参考,在偏移一定的频率下的单边带相对噪声功率。
这个数值是指在1Hz的带宽下的相对噪声电平,其单位为dBc/Hz。
频率源相位噪声测量研究

频率源相位噪声测量研究洑小云【摘要】噪声带给震荡信号的相位以及频率是不断发生变化的,在频率源的内部会产生一定的调制作用,所以当对频率源进行向外输出的时候,总会产生相位和频率上下起伏的现象.受噪声调制的影响导致的相位或者频率的起伏现象,一般被称之为频率稳定度,实质确实代表着频率的不稳定的程度.在时间域以及频率域中,频率稳定度的表现形式也是不同的,例如在时间域中输出的信号频率随时间而变化,而在频率域中则不仅仅表现为一根直线了,会在信号谱两侧出现相应的噪声边带.本文对频率源相位噪声测量进行初步的探讨.【期刊名称】《电子制作》【年(卷),期】2015(000)020【总页数】2页(P99-100)【关键词】频率源;相位噪声;测量【作者】洑小云【作者单位】中国电子科技集团第三十六研究所浙江嘉兴 314001【正文语种】中文洑小云中国电子科技集团第三十六研究所浙江嘉兴 314001【文章摘要】噪声带给震荡信号的相位以及频率是不断发生变化的,在频率源的内部会产生一定的调制作用,所以当对频率源进行向外输出的时候,总会产生相位和频率上下起伏的现象。
受噪声调制的影响导致的相位或者频率的起伏现象,一般被称之为频率稳定度,实质确实代表着频率的不稳定的程度。
在时间域以及频率域中,频率稳定度的表现形式也是不同的,例如在时间域中输出的信号频率随时间而变化,而在频率域中则不仅仅表现为一根直线了,会在信号谱两侧出现相应的噪声边带。
本文对频率源相位噪声测量进行初步的探讨。
频率源;相位噪声;测量1.1短稳测量概述所谓的时域测量,指的是在采样时间已经指定的情况下,对频率源进行连续不间断的测量,根据测量的结果计算出平均的频率,最后计算ay(T),也就是阿伦方差的平方根。
在计算的时候,最早采用的方法就是直接计数器的方法,这种方法也是最简单的一种方法,也叫做直接测频法。
受死时间以及计数器分辨能力的双重影响,在很长一段之间内这种方法都没有得到大范围的采用。
射频指标的测试方法
射频指标的测试方法射频(Radio Frequency,RF)指标的测试方法是评估无线通信设备性能的重要手段之一,包括信号强度、信噪比、频谱带宽、频率误差、相位噪声等指标。
下面将详细介绍射频指标的测试方法。
1.信号强度测试:信号强度是衡量射频通信质量的重要指标之一、测试方法包括测量信号接收功率和发射功率。
接收功率测试可以使用光谱分析仪或功率计等仪器,将设备的天线连接到测试设备,并测量接收到的射频信号的功率。
发射功率测试可以使用功率计、天线分析仪或频谱分析仪等仪器,通过测量设备发射的射频信号功率来评估发射功率。
2.信噪比测试:信噪比是衡量射频通信系统性能的指标之一、测试方法包括测量信号功率和背景噪声功率。
信号功率可以通过功率计或频谱分析仪来测量,背景噪声功率可以通过无信号输入时的频谱或功率测量获得。
然后,计算信噪比等于信号功率减去背景噪声功率。
3.频谱带宽测试:频谱带宽是指射频信号频谱的宽度,用于评估通信信道的有效传输能力。
测试方法包括使用频谱分析仪测量射频信号的频谱,然后通过分析频谱曲线的宽度来确定频谱带宽。
4.频率误差测试:频率误差是指设备实际输出频率与理论频率之间的差值。
测试方法包括使用频谱分析仪或频率计等仪器,将设备的输出信号连接到测试设备,并测量输出信号的频率。
然后,与设备的理论频率进行比较,计算频率误差。
5.相位噪声测试:相位噪声是指射频信号相位的随机变化。
测试方法包括使用相位噪声测试仪或频谱分析仪等仪器,将设备的输出信号连接到测试设备,并测量输出信号的相位噪声。
常用的相位噪声度量单位为分贝/赫兹(dBc/Hz)。
除了上述常见的射频指标测试方法外,还有其他射频指标的测试方法,例如功率谱密度测试、穿透损耗测试、带内波动测试等。
测试方法的选择取决于需要评估的具体指标和设备特性。
在进行射频指标测试时,需要使用适当的测试设备和测试仪器,如频谱分析仪、功率计、天线分析仪等。
同时,测试环境的选择也很重要,应尽量减少外部干扰和背景噪声,以确保测试结果的准确性和可靠性。
pll 1khz phase noise 指标

pll 1khz phase noise 指标PLL(Phase-Locked Loop,锁相环)是一种用于同步和控制信号频率的电路。
它广泛应用于通信系统、无线电接收和发射设备、频谱分析仪以及其他需要对信号频率进行相位和频率稳定性控制的应用中。
1kHz相位噪声是衡量PLL性能优劣的重要指标之一。
相位噪声是指在某一频率上的相位波动,通常以dbc/Hz为单位表示。
相位噪声越低,表示PLL对信号的相位稳定性越好。
首先,我们来了解一下PLL的基本原理。
PLL主要由相位比较器、低通滤波器、Voltage Controlled Oscillator(VCO,电压控制振荡器)和频率分频器组成。
当输入信号与VCO的频率匹配时,相位比较器的输出为零。
如果输入信号频率发生变化,相位比较器会产生一个误差信号,将其送入低通滤波器进行滤波处理,然后通过输出给VCO调整其频率,使其与输入信号保持相位同步。
PLL的性能可通过相位噪声和震荡抑制比(Spurious Response)来评估。
本文主要讨论1kHz相位噪声。
相位噪声是由于PLL中各个组件的不理想性以及环路中存在的干扰而产生的。
首先,我们需要了解一些与PLL相位噪声相关的基本概念和指标。
(1)功率谱密度(PSD):相位噪声通常以功率谱密度的形式给出,单位是dbc/Hz。
PSD表示在特定频率范围内单位频率带宽内的功率。
(2)杂散频率:在PLL的输出频率上除了原始信号频率外,还会出现一些杂散频率。
相位噪声可通过测量这些杂散频率来获得。
1kHz相位噪声的含义是测量频率为1kHz时的相位噪声。
这个频率是一个常用的测试频率,用于评估PLL的相位噪声性能。
对于一个理想的PLL,其相位噪声在所有频率上都应该是相同的。
然而,实际中的PLL由于各种因素的影响,可能会在某些频率范围内具有更高的相位噪声。
为了改善PLL的相位噪声性能,设计者通常会采取以下措施:(1)选择合适的VCO:VCO是PLL中最关键的组件之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LMK04000系列产品的相位噪声性能测试30082862加权函数H(f)是低通闭环传递函数,其中包含了诸如电荷泵增益、环路滤波器响应、VCO增益和反馈通路(数器等参数。
该式表示了图1所示的每一级PLLAN-191030082801图1 具有抖动清除能力的双PLL时钟合成器的架构© 2009 National Semiconductor Corporation 300828 2A N -19102.0 LMK04000系列产品介绍图2示出了LMK04000精密时钟去抖产品系列的详细的框图。
其PLL1的冗余的参考时钟输入(CLKin0,CLKin1),可以支持高达400 MHz 的频率。
参考时钟信号可以是单端或者差分式的信号,为了实现操作中稳定性,还可以启用其中的自动开关模式。
驱动OSCin 端口的VCXO 的最大容许频率为250 MHz 。
OSCin 端口的信号被反馈到PLL2相位比较器上,而且也作为相位和频率基准注入到PLL2中。
虽然在图中并未示出,其内部还是可以支持分立形式的、采用外接晶振的VCXO 。
PLL2的相位比较器的基准信号输入端还提供了一个可选用的频率倍增器,这可以使得相位比较的频率得以增加一倍,从而降低了PLL2的带内噪声。
PLL2集成了一个内置的VCO ,以及可选的内置环路滤波器部件,这一部分可以提供PLL2环路滤波器的3阶和4阶极点。
VCO 的输出带有缓冲,最终由Fout 引脚向外提供信号,该信号也可以经过一个VCO 分频器路由到内部的时钟分发总线上。
时钟分发部分则对时钟信号进行缓冲,并将其分配给各个可以独立配置的通道。
每个通道具有一个分频器、延迟模块和输出缓冲器。
在时钟输出端,各信号格式的组合关系可以根据具体的器件编号来确定。
30082802图2 LMK04000系列时钟电路的框图下面的表格示出了LMK04000系列中目前已发布的器件。
正如表1所示的那样,其中包含了2个VCO 频带以及两种可配置的时钟输出格式。
本报告中所测量的器件是LMK04031。
表1 LMK04000系列产品的器件编号、输出格式和VCO 频段NSID 工艺2VPECL/LVPECL 输出LVDS 输出LVCMOS 输出VCO 频率范围LMK04011BISQ BiCMOS 51430~1570 MHzLMK04031BISQ BiCMOS 22 2 1430~1570 MHz LMK04033BISQBiCMOS22 2 1840~2160 MHzAN-191033.0 LMK04000时钟输出的相位噪声和抖动我们已经用各种VCXO 与LMK04031进行匹配并进行了测试,利用Agilent E5052A 信号源分析仪对时钟输出端的相位噪声和抖动进行了测量。
在所有测试中,PLL1和PLL230082803图3 PLL1和PLL2环路滤波器部件30082804图4 相位噪声和抖动的测试装置构成的环路滤波器是固定不变的,如图3所示。
闭环带宽可以通过电荷泵电流或者相位比较器的频率来进行调节。
所采用的VCXO 的工作频率并不相同,因此测量到的时钟频率也各异,但都在122.88 MHz ~129 MHz 范围内。
图4示出了测试装置的构成。
4A N -1910下表总结了Fout 引脚(经过缓冲的VCO 输出)以及LVDS 、LVCMOS 和LVPECL 时钟格式的输出引脚处测量到的RMS 抖动。
对于在LMK04031输出端测量到的所有抖动,其积分带宽都是100 Hz 到20 MHz 。
表中所列的VCXO 的RMS 抖动,都是基于100 Hz 到200 kHz 的测量带宽。
之所以将200 kHz 选作测量的上限,是因为在大多数情况下,PLL2所用的环路带宽不会超过200 kHz ,因此在200 kHz 以上,VCXO 对总的抖动的贡献并不明显。
此外,由于测量带宽对于本指南中提到的VCXO 都是一致的,读者在试图确定器件是否适用于某个特定应用时,就可以在测量结果之间进行有意义的比较。
表2 RMS 抖动测量结果的总结VCXO 型号VCXOLMK04031频率(MHz )RMS 抖动(fs )(注释1)Fout 频率(MHz )Fout RMS 抖动(fs )(注释2)时钟输出频率(MHz )LVDS RMS 抖动(fs )(注释2)LVPECLRMS抖动(fs )(注释2)LVCMOSRMS 抖动(fs )(注释2)pp. 6-9CTS Model35761.443111474.56390.3122.88398.6413.1416.2pp.10-14Crystek CVHD-950122.88321474.56127.8122.88160.7170149.9pp.15-19Crystek CVHD-95080711520165.5126.66666193.1202.8178.9pp.20-24Crystek CVHD-92061.442851474.56337.5122.88339.9356335.6pp.25-29Epson T oyocom VG-450161.441431474.56230.2122.88250.4264.2237.3pp.30-34EpsonT oyocomVG-423119.443831516.32609.8126.36635.7615.6618.8pp.35-39Epson T oyocomTCO-2111-AA 245.76741474.56148.1122.88183.3184.4163.1pp.40-44Suntsu SVD 系列543361512486.3126497.2495.4491.9pp.45-49Suntsu SVD 系列61.442951474.56489122.88495.9494.9491.2pp.50-54Suntsu SVD 系列30.726551474.56842.5122.88860.2872.6838.8pp.55-59Vectron 5310155.521101555.2155.7129.6179.5187.6169.1pp.60-64Vectron 5310134.40821555.2155.5126.93333181.8191.6169.6注释1:VCXO 抖动的积分带宽(Integration Bandwidth )是100 Hz ~200 kHz ;注释2:时钟测量中抖动的积分带宽是100 Hz ~200 kHz 。
该报告的余下部分示出了用E5052A 捕捉到的相位噪声曲线。
在每个VCXO 所对应的小节的开始,都给出了一个参考时钟频率、PLL1相位比较器频率和闭环带宽以及PLL2相位比较器频率、闭环带宽等参数的表格。
每个VCXO 小节还包含了VCXO 的开环相位噪声曲线,以及LMK04031输出的闭环相位噪声曲线。
AN-191053.1 相位噪声测量曲线表3 CTS Model 357,61.44 MHz基准时钟(MHz )F comp1 (MHz )PLL1 环路带宽(Hz )F comp2 (MHz )PLL2 环路带宽(kHz)30.721.0243030.7295.430082805图5 CTS Model 357 VCXO 开环相位噪声,61.44 MHz 6A N -19130082806图6 LMK04031 Fout 相位噪声,CTS Model 357 VCXOAN-1910730082807图7 LMK04031 LVDS 相位噪声,CTS Model 357 VCXO 8A N -19130082808图8 LMK04031 LVCMOS 相位噪声,CTS Model 357 VCXOAN-1910930082809图9 LMK04031 LVPECL 相位噪声,CTS Model 357 VCXO 10A N -1910表4 Crystek CVHD-950-122.88 MHz基准时钟(MHz )F comp1 (MHz )PLL1 环路带宽(Hz )F comp2 (MHz )PLL2 环路带宽(kHz )122.881.0242061.44189.730082810图10 Crystek CVHD-950-122.88 VCXO 开环相位噪声AN-191030082811图11 LMK04031 Fout相位噪声,Crystek CVHD-950-122.88 VCXOA N -191030082812图12 LMK04031 LVDS 相位噪声,Crystek CVHD-950-122.88 VCXOAN-191030082813图13 LMK04031 LVCMOS相位噪声,Crystek CVHD-950-122.88 VCXOA N -191030082814图14 LMK04031 LVPECL 相位噪声,Crystek CVHD-950-122.88 VCXOAN-1910表5 Crystek CVHD-950-80基准时钟(MHz )F comp1 (MHz )PLL1 环路带宽(Hz )F comp2 (MHz )PLL2 环路带宽(kHz )401.02040120.330082815图15 Crystek CVHD-950-80 VCXO 开环相位噪声A N -191030082816图16 LMK04031 Fout 相位噪声,Crystek CVHD-950-80 VCXOAN-191030082817图17 LMK04031 LVDS相位噪声,Crystek CVHD-950-80 VCXOA N -191030082818图18 LMK04031 LVCMOS 相位噪声,Crystek CVHD-950-80 VCXOAN-191030082819图19 LMK04031 LVPECL相位噪声,Crystek CVHD-950-80 VCXOA N -1910表6 Crystek CVPD-920-61.44基准时钟(MHz )F comp1 (MHz )PLL1 环路带宽(Hz )F comp2 (MHz )PLL2 环路带宽(kHz )30.721.0242030.7295.430082820图20 Crystek CVPD-920-61.44 VCXO 开环相位噪声AN-191030082821图21 LMK04031 Fout相位噪声,Crystek CVPD-920-61.44 VCXOA N -191030082822图22 LMK04031 LVDS 相位噪声,Crystek CVPD-920-61.44 VCXOAN-191030082823图23 LMK04031 LVCMOS相位噪声,Crystek CVPD-920-61.44 VCXOA N -191030082824图24 LMK04031 LVPECL 相位噪声,Crystek CVPD-920-61.44 VCXOAN-1910表7 Epson Toyocom VG-4501,61.44 MHz基准时钟(MHz )F comp1 (MHz )PLL1 环路带宽(Hz )F comp2 (MHz )PLL2 环路带宽(kHz )30.721.0242030.7295.430082825图25 Epson Toyocom V G-4501 VCXO ,61.44 MHz ,开环相位噪声A N -191030082826图26 LMK04031 Fout 相位噪声,Epson Toyocom V G-4501 VCXOAN-191030082827图27 LMK04031 LVDS相位噪声,Epson Toyocom V G-4501 VCXOA N -191030082828图28 LMK04031 LVCMOS 相位噪声,Epson Toyocom V G-4501 VCXOAN-191030082829图29 LMK04031 LVPECL相位噪声,Epson Toyocom V G-4501 VCXOA N -1910表8 Epson Toyocom VG-4231,19.44 MHz基准时钟(MHz )F comp1 (MHz )PLL1 环路带宽(Hz )F comp2 (MHz )PLL2 环路带宽(kHz )19.441.082019.445930082830图30 Epson Toyocom V G-4231 VCXO ,19.44 MHz ,开环相位噪声AN-191030082831图31 LMK04031 Fout相位噪声,Epson Toyocom V G-4231 VCXOA N -191030082832图32 LMK04031 LVDS 相位噪声,Epson Toyocom V G-4231 VCXOAN-191030082833图33 LMK04031 LVCMOS相位噪声,Epson Toyocom V G-4231 VCXOA N -191030082834图34 LMK04031 LVPECL 相位噪声,Epson Toyocom V G-4231 VCXOAN-1910表9 Epson Toyocom TCO-2111-A 245.76基准时钟(MHz )F comp1 (MHz )PLL1 环路带宽(Hz )F comp2 (MHz )PLL2 环路带宽(kHz )122.881.0242061.44189.730082835图35 Epson Toyocom TCO-2111-AA VCXO ,245.76 MHz ,开环相位噪声A N -191030082836图36 LMK04031 Fout 相位噪声,Epson Toyocom TCO-2111-AA VCXOAN-191030082863图37 LMK04031 LVDS相位噪声,Epson Toyocom TCO-2111-AA VCXOA N -191030082864图38 LMK04031 LVCMOS 相位噪声,Epson Toyocom TCO-2111-AA VCXOAN-191030082865图39 LMK04031 LVPECL相位噪声,Epson Toyocom TCO-2111-AA VCXOA N -1910表10 Suntsu SVD 系列,54 MHz基准时钟(MHz )F comp1 (MHz )PLL1 环路带宽(Hz )F comp2 (MHz )PLL2 环路带宽(kHz )271.0302781.930082839图40 Suntsu SVD 系列VCXO ,54 MHz ,开环相位噪声AN-191030082840图41 LMK04031 Fout相位噪声,Suntsu SVD系列VCXO,54 MHzA N -191030082841图42 LMK04031 LVDS 相位噪声,Suntsu SVD 系列VCXO ,54 MHzAN-191030082842图43 LMK04031 LVCMOS相位噪声,Suntsu SVD系列VCXO,54 MHzA N -191030082843图44 LMK04031 LVPECL 相位噪声,Suntsu SVD 系列VCXO ,54 MHzAN-1910表11 Suntsu SVD 系列,61.44 MHz基准时钟(MHz )F comp1 (MHz )PLL1 环路带宽(Hz )F comp2 (MHz )PLL2 环路带宽(kHz )30.721.0243030.7295.430082844图45 Suntsu SVD 系列VCXO ,61.44 MHz ,开环相位噪声A N -191030082845图46 LMK04031 Fout 相位噪声,Suntsu SVD 系列VCXO ,61.44 MHzAN-191030082846图47 LMK04031 LVDS相位噪声,Suntsu SVD系列VCXO,61.44 MHzA N -191030082847图48 LMK04031 LVCMOS 相位噪声,Suntsu SVD 系列VCXO ,61.44 MHzAN-191030082848图49 LMK04031 LVPECL相位噪声,Suntsu SVD系列VCXO,61.44 MHzA N -1910表12 Suntsu SVD 系列,30.72 MHz基准时钟(MHz )F comp1 (MHz )PLL1 环路带宽(Hz )F comp2 (MHz )PLL2 环路带宽(kHz )30.721.0243030.7295.430082849图50 Suntsu SVD 系列VCXO ,30.72 MHz ,开环相位噪声。