异步电动机转差频率矢量控制方案研究
matlab期末作业转差频率控制的异步电动机矢量控制系统的matlab仿真

转差频率控制的异步电动机矢量控制系统的matlab仿真一、概要:1。
矢量变换控制技术的诞生和发展奠定了现代交流调速系统高性能化的基础。
交流电动机是个多变量、非线性、强耦合的被控对象,采用参数重构和状态重构的现代控制理论概念可以实现交流电动机定子电流的励磁分量和转矩分量之间的解耦,实现了将交流电动机的控制过程等效为直流电动机的控制过程,使交流调速系统的动态性能得到了显著的改善和提高,从而使交流调速取代直流调速成为可能。
目前对调速性能要求较高的生产工艺已较多地采用了矢量控制型的变频调速装置。
实践证明,采用矢量控制的交流调速系统的优越性高于直流调速系统。
现代交流调速系统由交流电动机、电力电子功率变换器、控制器和检测器四大部分组成。
根据被控对象——交流电动机的种类不同,现代交流调速系统可分为异步电机调速系统和同步电动机调速系统,矢量控制是目前交流电动机的先进控制方式,本文对异步电动机的动态数学模型、转差频率矢量控制的基本原理和概念做了简要介绍,并结合Matlab的Simulink软件包构建了异步电动机转差频率矢量控制调速系统的仿真模型,并进行了试验验证和仿真结果显示,同时对不同参数下的仿真结果进行了对比分析。
该方法简单、控制精度高,能较好地分析交流异步电动机调速系统的各项性能。
2.由于交流异步电动机属于一个高阶、非线性、多变量、强耦合系统。
数学模型比较复杂,将其简化成单变量线性系统进行控制,达不到理想性能。
为了实现高动态性能,提出了矢量控制的方法。
矢量变换控制技术的诞生和发展奠定了现代交流调速系统高性能化的基础。
一般将含有矢量变换的交流电动机控制称之为矢量控制。
交流电动机是个多变量、非线性、强耦合的被控对象,采用参数重构和状态重构的现代控制理论概念可以实现交流电动机定子电流的励磁分量和转矩分量之间的解耦,实现了将交流电动机的控制过程等效为直流电动机的控制过程,使交流调速系统的动态性能得到了显著的改善和提高,从而使交流调速取代直流调速成为可能。
异步电动机矢量控制特性研究
文章编 号 :6 1 72(0 190 8—5 17 — 9一 1)—130 - 4 2
Ab c a t T i a t l n v e o e a y c r n u t r f q e c o t l r cp e c mb n d wi ' s r c : h s ri e i iw ft s n h o o s mo o r u n y c n r i i l , o i e t fe c h e o p n hi — q e c o v ri n v c o o to t t g , a e n M al b S mu i k t o o t e s u n y c n e so e t r c n r lsr e b s d o t / i l o l b x, i lt n mo e s e t b a y a n h mu ai d li s — o a l h d,e e r h d t e a y c o o s mo o e t r c n r lc a a trsi s I s t d u a i t fm o o u n n i e r s a c e s n h n u t r v c o o to h r c e it . t ee p a v rey o tr r n i g s h r c sa e s d e e n —o d mo o ,l a i g c ee ae l w,a d d a c c a a trsis v r e e v l i n t t , t id t o l a t r o d n ,a c lr t ,so u h n y mi h r ce it , e i d t a i t a d n c i f h dy f a i i t f em o e . e sb l yo d 1 i h t
基于三电平异步电机转差频率矢量控制的仿真研究

Si lt n St d f y c r n u t ri Sl r q e c mua i u y o o As n h o o s Mo o n i F e u n y p Co t I a e o r e 1v I n r s n Th e . e o B e
K y wo d e r s:s p fe u n y;t r e l v l i lt n;v ra l e u n y s e d r g lt n l q e c h e - e ;smu a i i r e o a ib e f q e c p e e u ai r o
后感 应 电机 也 在 工 业 领 域 得 到 广 泛 的 普 及 , 着 随
过 续 流二 极 管 并 对 电容 C 充 电 , 该 相输 出 电压 则
为 V = 一 E 2 /。
R +, J P
1
一
坐 标 系 表 示 同 步 旋 转 坐 标 系 , 中 其
( g e zt n 轴 固 定 在 磁 链 矢 量 上 , (oq e man t ai ) i o T tru ) 轴 超 前 轴 9 。 0 。该 坐 标 系 和 磁链 矢 量 一 起 在 空 间 以同 步 角 速 度 t 旋 转 , 控 制 的 基 本 方 程 式 O 其
如下 :
l
L
, P J
O J1
一 wL
L P L
R + L P
一
一
, P J
一
电压 方 程 :
三
R + L P
Y
L
P
R 4 -L P
式 中 :。 “ “ / 分 别 为 定 、 子 电 压 的 转 矩 分 u / ,  ̄ r t 转 量 和励 磁 分 量 ; 为 定 子 电 阻 ; L R L , 为 定 子 、 转 子 绕 组 自感 ; 为 微 分 算 子 ; 为 异 步 电 动 机 为例 , 给 s 以 当 和 S 导 通 触 发 脉 冲 , 和 s S 关 断 , 源 对 电容 C 充 电 , 电 。 如 忽略 S 和 s: 压 降 , 该 相 输 出 电 压 为 V =E 管 则 / 2 。当 给 s 和 S, 导通 触 发 脉 冲 时 , 和 s S。 关 断 , 若 负 载 电 流 为 流 入 方 向 , 电 源 对 电容 c。 电 , 则 充 电 流流 过 箝 位 二 极 管 D 和 S 此 时 该 相 输 出 端 电 压 V = 若 负 载 电流 为 流 出 方 向 , 流 先 流 过 0; 电
异步电动机矢量控制

6
1、三相交流电产生旋转磁场
i
iA
0
iB
iC
C ωt
y
A · z x · B C
y
A z · B x· C ·
y
A
z · B x ·
60 0 900
wt=0
w t = 60
w t = 90
由此可见,交流电动机三相对称的静止绕组ABC,通以三相平衡的正 弦电流iA、iB、iC时,能够产生合成磁通势,这个合成磁通势以同步转 速沿A—B—C相序旋转。 2、两相交流电产生旋转磁场 这样的旋转磁通势也可以由两相空间上相差900的静止绕组 、 ,通 以时间上互差900的交流电来产生。
* i* * * i * 2/3相变换 iA iα B iC β
A1
-1
变频器
iT iM
反馈通道
旋转变换 A2
iα iβ 3/2相变换
A1
iA i B i C
M
以下任务是,从交流电机三相绕组中分离产生磁通势的直流分量和产生 电磁转矩的直流分量,以实现电磁解耦。解耦的有效方法是坐标变换。
13
8.2 坐标变换
异步电动机,也是两个磁场相互作用产生电磁转矩。不同的是,定 子磁势、转子磁势以及二者合成的气隙磁势都是以同步角速度在空 间旋转的矢量,且存在强耦合关系。——关系复杂,难以控制。
然而,交、直流电动机产生电磁转矩的规律有着共同的基础,电磁转矩 控制在本质上是一种矢量控制(直流电动机是特例),也就是对矢量的 幅值和空间位置的控制。
4
从电机学理论讲,任何电动机产生电磁转矩的原理,在本质上都是电动 机内部两个磁场相互作用的结果。
直流电动机,主极磁场在空间固定不变,与电枢的磁势方向总是互 相垂直(正交)、各自独立、互不影响(标量)。 例如他励电动机,励磁和电枢是两个独立的回路,可以对励磁电流 和电枢电流分别控制和调节,就能达到控制转矩的目的,实现转速 的调节。——控制灵活,容易实现。
异步电机矢量控制系统的设计及仿真研究

在定子 电流的两 个分 量之 间实 现 了解耦 , i 唯一 决定 磁链 i则 只影 响转矩 , 与直流 电机 中的励磁 电流和 电枢 电流
相对应 , 这样就大大简化 了多变量强耦合 的交流变频调 速系
r b s e s h p e e u ao n ec re t e l tro a i o a e trc n rlu e P o tolr a d t e s e d o u t s .T e s e d r g l tra d t u r n g ao ft d t n lv c o o t s 1 n r l , n h p e n h ru r i o c e r s o s s o e v rh o n t e c n r lp o e s n o d rt o v h s rb e ,we p o o e e in meh d o e p n e f n o e s o ti h o t r c s .I r e o s l e t e e p o lms t o rp s d a d sg t o f s e d c n rl ri h n u t n mo o e trc n r l o e p r o e o u p e sn p e e p n e o es o t n i— p e o t l n t e id ci trv co o to rt u p s fs p r si g s e d r s o s v r h o n oe o f h i d ci n mo o e trc n r la d e h n i g i u t trv co o to n n a cn mmu i . T e i d ci n moo s d f l r n e e tr c n rl t — o nt y h n u t tr u e ed o e t d v c o o t o a o i i o
异步电动机的矢量控制系统
isT 轴模型
cosφ sinφ
cosφ sinφ
注意:如果忽略变频器可能产生的滞后,并认为控制器中反 旋转变换器与电机内部的旋转变换环节相抵消,2/3变换器 与电机内部的3/2变换环节相抵消,则虚框内的部分可以删 去,剩下的就是直流调速系统。
第28页/共68页
28
控制Βιβλιοθήκη i*sM M Ti*sT
(7 21)
小结:矢量控制基本方程☆
r
Lm 1 Tr
p
isM
或 : isM
1
Tr Lm
p
r
(7 12)
Te
np
Lm Lr
isT r
(7 15)
sl
Lm
Tr r
isT
(7 -17)
24
第25页/共68页
25
二、矢量控制方法
既然异步电动机经过坐标变换可以等效成直流电动机,那 么,模仿直流电动机的控制方法,给出直流电动机的控制量, 再经过相应的反变换就能控制异步电动机。
第29页/共68页
cosφ sinφ
根据单位矢量获取方法的不同,矢量控制方法可分为两种: ✓直接矢量控制(由Blaschke发明) ✓间接矢量控制(由Hasse发明) 。
当矢量控制所用单位矢量和磁链是直接检测到的或由检 测到的电机的端子量及转速计算得到时,被称为直接矢量 控制,也可称为磁通反馈矢量控制(Feedback Vector Control)。
MT坐标系: 规定d轴沿转子磁链Ψr方向,并称之为M (Magnetization)轴, q轴则逆时针转90º,即垂直于转子磁链Ψr,称之为T (Torque)轴。这样的两相同步旋转坐标系就规定为MT坐标系, 或称按转子磁场定向(Field Orientation)的坐标系。
异步电动机转差频率间接矢量控制matlab仿真(毕业设计)
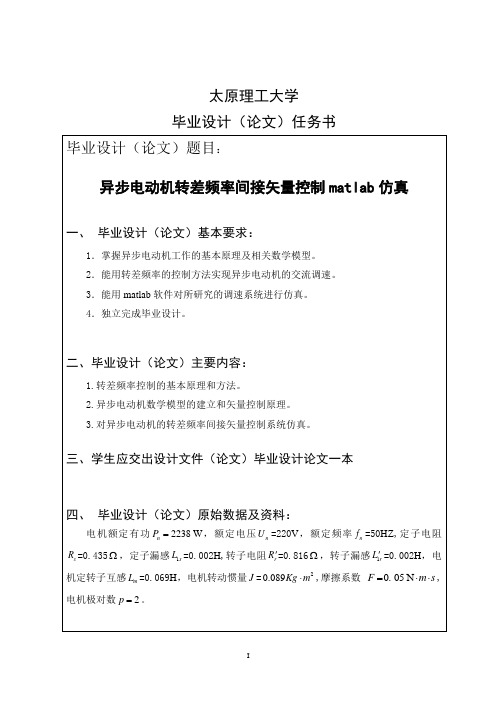
太原理工大学毕业设计(论文)任务书异步电动机转差频率间接矢量控制matlab仿真摘要本文基于MATLAB 对异步电动机转差频率控制调速系统进行仿真研究。
首先分析了异步电动机转差频率控制技术的主要控制方法、基本组成与工作原理。
之后对异步电机的动态模型做了分析,进一步介绍了异步电机的坐标变换,对异步电机转差频率矢量控制系统的基本原理进行了阐述,通过仿真工作,证明了其可行性。
最后,通过对仿真结果进行分析,归纳出如下结论:单纯的转差频率控制带载能力差,应用转差频率矢量控制可增强电机对转矩的调节能力且无需电压补偿。
关键词:转差频率,矢量控制,异步电动机Induction Motor Slip Frequency Indirect Vector ControlMatlab SimulationAbstractThis paper focuses on the matlab simulation of the asynchronous motor speed regulation system.Firstly , this paper analyzes the main control method , basic composition and working principle of the induction motor slip frequency control technology.Secondly , this paper analysis the dynamic model of asynchronous motor and further introduces the coordinate transfer and the basic principle of motor slip frequency vector control system. At the same time , the simulation work to prove its feasibility.Finally , according to analysis of the simulation results , the conclusions are as follows simply slip frequency control is always with poor load capacity , on the contrary the vector control applications can enhance the ability to regulate the motor of the torque and without voltage compensation.Key words : slip frequency , vector control , induction motor目录摘要 (I)Abstract (II)1绪论 (1)1.1现代交流调速技术的发展 (1)1.1.1异步电动机交流调速系统的类型 (2)1.1.2交流调速系统的发展趋势和动向 (2)1.2本文主要研究内容 (2)1.2.1转差频率控制的基本概念 (2)1.2.2基于异步电动机稳态模型控制的转差频率控制规律 (4)1.2.3基于异步电动机动态态模型控制的转差频率矢量控制规律 (5)2异步电动机转差频率间接矢量控制交流调速系统 (7)2.1异步电机的特点 (7)2.2三相异步电动机的多变量非线性数学模型 (7)2.2.1电压方程 (8)2.2.2磁链方程 (9)2.2.3转矩方程 (11)2.2.4电力拖动系统运动方程 (11)2.3矢量控制技术思想 (12)2.3.1坐标变换 (13)1.坐标变换的基本思想和原则 (13)2.三相-两相变换(3s/2s变换) (15)2.3.2交流异步电机在两相任意旋转坐标系上的数学模型 (18)2.3.3异步电机在两相静止坐标系( 坐标系)上的数学模型 (20)2.3.4异步电机在两相同步旋转系上的数学模型 (21)2.3.5三相异步电动机在两相坐标系上的状态方程 (21)2.4基于转差频率矢量控制调速系统的组成 (22)2.4.1基于转差频率间接矢量控制调速系统的工作原理 (22)2.4.2异步电动机转差频率间接矢量控制公式推导 (24)3主电路与控制电路 (25)3.1 SPWM逆变电路 (25)3.2控制电路的设计 (26)3.2.1转速PI调节器的设计 (26)3.2.2函数运算模块的设计 (28)4转差频率间接矢量控制的matlab仿真 (30)4.1仿真模型的搭建及参数设置 (30)4.1.1主电路模型 (30)4.1.2控制电路的模型搭建 (31)4.2仿真结果与分析 (33)4.2.1仿真波形图 (33)4.2.2仿真结果分析 (35)4.3本章总结 (35)参考文献 (36)致谢 (37)1绪论1.1现代交流调速技术的发展在工业化的进程中 ,电动机作为将电能转换为机械能的主要设备。
第六章 异步电动机矢量控制与直接转矩控制
图6-3 矢量控制系统原理
6.2 按转子磁链定向异步电动机矢量控制系统 6.2.1 按转子磁链定向的矢量控制方程 1.异步电动机在M-T坐标系上的数学模型 为了与一般的同步旋转d-q坐标系区别, 取d轴沿转子磁链Ψr的方向,称之为M轴;q轴逆 时针旋转90º,称之为T轴。这样就得到了按转 子磁链定向的两相同步旋转M、T坐标系。 在M-T坐标系上,磁链方程为 Ψms=Lsims+Lmimr Ψts=Lsits+Lmitr Ψmr=Lmims+Lrimr=Ψr (6-3) Ψtr=Lmits+Lritr=0 (6-4)
(2) 转矩方程 由磁链方程式(6-4),得 重写电磁转矩方程
Te =
itr = −
Lm its Lr
(6-10)
(6-6) 这个转矩表达式和直流电动机的很相似,当转 子磁链Ψr不变时,定子电流转矩分量的变化会 引起电磁转矩成正比的变化,没有任何推迟,这 正是我们所期望的关系。 但是考虑到Ψr也是被控对象,式(6-6)实际 上仍然是非线性的。他励直流电动机的磁通不 用控制就是常量,交流异步电动机的Ψr被控制 为常量,这仍然是两个完全不同的概念。
3 Lm np ψ r its Lr 2
(3)转差角频率方程
由电压矩阵方程式(6-5)的第四行展开得
0 = ω s ( Lm ims + Lr i mr ) + Rdqr itr
将磁链方程式(6-3)代入上式,得 整理后得
ωs = −
Rdqr
0 = ω sψ r + Rdqr itr
itr
ψr
(6-11)
6.1 矢量控制(VC:vector control)的基本思路 6.1.1 模仿直流电动机 粗略地讲,矢量控制是模仿他励直流电动 机的控制。忽略磁饱和及电枢反应的影响,直 流电动机的转矩方程为 Te=CT´IaIf
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
114 基于转子磁场定向和电流滞环跟踪调节的异 步电动机矢量控制调速系统整合
调用 Simulink的异步电动机模块 、 IGB T逆变 器模块 、转速 P I调节器模块 、坐标变换模块和以 上搭建的矢量控制器模块 , 按照间接转子磁通定 向控制的思想 , 对各个模块进行整合 , 便可建立 异步电动机矢量控制调速系统的 。仿真模型整体 结构如图 4所示 。
整体结构如图 3所示 。
图中带 3 号的均为给定值 。该系统的磁场定 向由磁链和转矩给定信号确定 , 靠矢量控制方法 保证 , 提高了整个矢量控制的动态响应性能 。
在磁链开环的转差型矢量控制系统中 , 励磁 电流 i3sd和电磁转矩 T3e 作为给定的指令值 。假设电 机参数已知 , 则可得转子磁场定向后 d - q轴的基 本方程为 [ 1 ] :
rd
-
Lm2RLeabharlann r + L2rσL
sL
2 r
Rs
isq
+σ1L s usq
(1)
式中 , np 为电机极对数 ; Tl 为负载转矩 ; J 为电机
转动惯量 ; σ为电机漏磁系数 , σ = 1 - Lm Lm /L sL r ;
s表示定子 ; r表示转子 ; d 表示 d 轴的参量 , q表
示 q轴的参量 ; m 表示同轴定 、转子间的耦合量 。
i3sq
=
3
4L r np LmΨ
r
T3e
(2)
Ψ r
=1
Lm + Tr
p
isd
,
Tr
= Lr Rr
(3)
ω sl
=
Lm
TrΨ3r
i3sq
(4)
ω3 s
=ωsl +ωr =ωsl + np ×ωm
(5)
∫ θ =
ω s
d
t
(6)
式中 , Tr 为转子电磁时间常数 ; θ为转子磁场定向 角度 ; p是微分算子 。
避免较大的超调 。
2009年第 42卷第 6期
图 5 矢量控制器内部模块的结构图
2 基于双闭环控制的异步电动机矢量 控制系统的建模与仿真
211 电压源型 SPWM 逆变器模块 在图 4所示 Simulink的 IGB T逆变器模块的输
出端为电气接口 , 不能连接 S2Function表示的异步 电动机仿真模块弱电输入端口 , 因此要利用 Simu2 link的基本功能元件搭建 SPWM 逆变器 , 如图 6 所示 。
由此可得感应电机的状态方程 , 其中 :
状态变量 x = [ωr Ψrd Ψrq isd isq ]T
输入 输出
u = [ ua ub uc Tl ]T y = [ ia ib ic ωr Te ]
本文的交流异步电机矢量控制变频调速系统
首先采用 M atlab / Simulink内含的异步电动机模块 ,
环跟踪 (CHB )控制模块输出逆变器的驱动脉冲 Pul2
ses。矢量控制器内部模块的搭建结构如图 5所示 。
矢量控制系统的转速调节器 P I参数的选择是
一个很重要的环节 [ 11212 ] , 需要根据实际的电机参
数多次试验和验证来获取最佳比例系数 Kp 和积分 系数 Ki。具体做法是通过观察仿真波形图 , 当偏 差较大时 , 调整 Kp 值 , 以快速减少偏差 ; 当偏差 达到要求后 , 调整 Ki 值 , 用以最终消除稳态偏差 ,
给定值
Ψ3 r
则经过计算公式
i3sd
=Ψ3r
/Lm 生成励磁
电流 i3sd 。由矢量控制基本方程式 ( 2) ~式 ( 6)求出
ω sl
、ωr、
i3sq及坐标变换角
θ,
i3sd和 i3sq经过 d - q - 0
→a - b - c坐标变换 , 得到定子三相电流指令 I3abc ,
再与反馈的三相定子电流 Iabc相比较 , 经过电流滞
· x = f (x)
+ g ( x) u状态方程形式表示如下 [ 3 ] :
dωr dt
= np2 Lm JL r
(Ψrd
isq
- Ψrq isd )
-
np Tl J
异步电动机转差频率矢量控制方案研究 夏晓凯 , 等
dΨrd dt
=
-
R rΨ
L r rd
-
ωΨ r
rq
+ R rLm Lr
isd
微电机
2009年第 42卷第 6期
中图分类号 : TM343 文献标志码 : A 文章编号 : 100126848 (2009) 0620048204
异步电动机转差频率矢量控制方案研究
夏晓凯 , 张建忠 , 程 明
(东南大学 电气工程学院 , 南京 210096)
摘 要 : 首先介绍了异步电动机的动态数学模型和矢量控制基本思想 ; 在 M atlab / Simulink的环 境下分别建立了基于转子磁场定向及电流滞环调节和基于双闭环控制器及 S函数的转差型矢量控 制系统的仿真模型 。两个模型的仿真结果表明 , 两个系统均具有较好的动 、静态性能 , 适用于 各种要求和容量的调速装置 , 验证了用 S函数进行仿真建模方法的通用性和有效性 。 关键词 : 异步电动机 ; 转子磁场定向 ; 转差型矢量控制 ; 仿真
应电机的仿真模型如图 2所示 。并以来替换原仿真 系统的异步电动机模块 。 S2Function是 Simulink中 对动态系统进行仿真的计算机描述语言 。M atlab提 供了文件模板 sfuntmp l1m。在理解模板中各个函数 意义的基础上 , 按照 M atlab语言要求添加和修改 式 ( 1 ) 的 异 步 电 机 的 状 态 方 程 语 句 , 即 得 到 S2 Function表示的异步电动机仿真模块 。
图 4 基于电流滞环跟踪调节的异步电动机 矢量控制系统仿真模型图
模型中采用电流滞环跟踪控制的电流源型 IG2
BT逆变器 。直流侧可以用一个直流电压源表示 ,
逆变器输出的三相电压给异步电动机供电 。该系
统采用转速闭环 、磁链开环控制 , 转速指令值和
实际值经过 P I调节器可输出转矩指令值 T3e , 磁链
其底层模块结构如图 1所示 。即为按照上述数学模
型的运动方程 、磁链方程和电压 (电流 )方程 , 并
利用 Simulink的功能元器件搭建而来 。
图 1 交流异步电机本体模块结构框图
112 S2Function的 M 文件编辑及仿真模型的封装 根据以上的状态方程 , 用 S2Function来创建感
dΨrq dt
=
-
R rΨ
L r rq
+ωrΨrd
+ R rLm Lr
isq
d isd dt
=σLLm
RrΨ
L2 rd
sr
+σLLmsL
ωΨ r r
rq
-
Lm2
R r + L2r σL sL2r
Rs
isd
+σ1L s usd
d isq dt
=σLLm
RrΨ
sL2r
rq
-
Lm
σL sL
ωΨ r r
·50 ·
图 6 SPWM 调制模块
正弦波脉宽调制技术采用双极性控制方式 。 其调制 信 号 采 用 标 幺 值 , 故 输 出 的 SPWM 波 是
+ 1、 - 1 相间的脉冲信号 , 要乘以基准值 Vdc /2 后才能作为 S2Function感应电机模块的输入信号 。
212 基于双闭环调节和 S2Function的异步电动机 矢量控制调速系统的整合
113 矢量控制模块
如前所述 , 矢量控制技术的关键是磁场定向 。
在这里采用转子磁场定向 , 就是将 d - q坐标系置
于同步旋转磁场上 , 并取 d轴沿着转子总磁链矢量
Ψ r
的方向
。此时转子磁链的
q轴分量 Ψrq为零 ,
将
d轴励磁分量定为常数 , 就能如控制直流电机般地
控制交流异步电机 。本文采用的矢量控制系统的
收稿日期 : 2008212201 ·48 ·
建模仿真 , 并利用 S2Function 对感应电机进行建 模 , 最后对两种系统的仿真结果作比较分析 , 为 各类电机控制系统提供了有效 、可靠的研究分析 依据 。
1 基于电流滞环跟踪控制的异步电动 机矢量控制系统建模与仿真
111 异步电动机数学模型
由式 ( 3)可知 , Ψr 和 isd之间为一阶线性关系 。
当励磁分量 isd突变时 , Ψr 的变化要受到励磁惯性
的阻挠
。当
Ψ r
稳定时
,
pΨr = 0,
因此在转子磁链
定向的条件下 , i3sd =Ψ3r /Lm 。由式 ( 2 )和式 ( 3 )可
知 , Ψr 和 i3sq为相互独立的变量 , 可以分别进行单 独控制 。
0 引 言
异步电动机的动态数学模型是一个高阶 、非 线性 、强耦合的多变量系统 [ 1 ] 。为使异步电动机 调速系统具有高动态性能 , 目前应用最多的控制 方案有 : 按转子磁链定向的矢量控制系统和按定 子磁链控制的直接转矩控制系统 [ 2210 ] 。其中 , 采用 矢量解耦控制算法调速范围广 , 尤其是低速时调 速性能较直接转矩算法优越 , 目前已被广泛应用 于高性能异步电机调速系统中 。转速 、磁链闭环 的直接矢量控制系统存在着系统复杂 、磁链反馈 信号易受电机参数 Tr 和 Lm 变化的影响等缺点 [ 425 ] , 造成控制的不准确性 。转速闭环 、磁链开环的间 接矢量控制方法 , 即转差频率矢量控制算法省去 了转子磁链观测器 , 磁场定向精度受电机参数影 响较小 , 具有很好的应用前景 。本文利用 M atlab 环境下的 Simulink模型库 , 分别对基于电流滞环控 制和基于双闭环控制的转差型矢量控制系统进行