数控机床伺服进给系统的分析及MATLAB仿真
基于Matlab的数控交流伺服系统的仿真研究
基于Matlab的数控交流伺服系统的仿真研究赵涛1,2,朱晓春1,2,陈桂1,2(11南京工程学院自动化学院,江苏南京211167)(21南京工程学院先进数控技术江苏省高校重点建设实验室,江苏南京210013)摘要:为实现高性能的伺服控制,针对基于矢量控制的PMSM伺服系统的速度调节和控制进行了分析。
利用Matlab平台构建了PMSM矢量控制仿真模型,根据数控伺服系统的性能要求,对不同插补方式下的速度控制进行了仿真研究,结果证明了该系统模型的有效性。
关键词:伺服;永磁同步电动机;矢量控制;插补;仿真中图分类号:TP273文献标识码:A文章编号:1672-1616(2007)19-0034-04伺服系统是数控机床的重要组成部分之一,主要功用是接受来自数控系统CNC的指令信息,控制执行部件的运动方向、进给速度与位移量,以便加工出符合要求的零件。
伺服系统的动态响应和伺服精度是影响数控机床加工精度、表面质量和生产率的主要因素,因此数控机床的速度和精度等技术指标在很大程度上由伺服系统的性能所决定。
伺服系统性能主要体现在稳态跟踪误差、动态响应的精确性和快速性及对系统参数变化和随机干扰的鲁棒性等几个方面。
伺服系统要获得高性能和高精度,主要是通过提高执行机构、测量装置的精度和性能,或者是选择先进的控制策略来达到的[1,2]。
目前在小型和经济型数控机床上还使用步进电机,中高档数控机床大多采用直流伺服电机和交流伺服电机,而高精度数控机床已采用交流数字伺服系统,伺服电机的位置、速度等都已实现了数字化,并采用了新的控制理论,实现了不受机械负荷变动影响的高速响应伺服系统[2]。
如FANU C公司在其16i/18i/21i系列产品中采用高响应矢量控制(High Response Vector,简称HRV),实现了数控机床的高速、高精度和高效率。
交流伺服系统按驱动电机的类型,主要可分为永磁同步和感应异步两种交流伺服系统,其中由于基于正弦波的永磁同步电动机(PMSM)具有功率密度大、效率高、转子损耗小等优点,具备了十分优良的低速特性和很宽的调速范围,符合高性能伺服驱动的要求,在运动控制领域得到了广泛的应用。
数控机床直线电机进给伺服系统的动态特性分析与研究

数控机床直线电机进给伺服系统的动态特性分析与研究1. 数控机床直线电机进给伺服系统概述随着科技的不断发展,数控机床在工业生产中扮演着越来越重要的角色。
为了提高数控机床的加工精度和效率,近年多的研究者开始关注直线电机进给伺服系统的研究与应用。
直线电机进给伺服系统是一种采用直线电机作为驱动源的高精度、高速度、高可靠性的伺服系统,广泛应用于数控机床、机器人、自动化生产线等领域。
直线电机进给伺服系统具有很多优点,如结构简单、体积小、重量轻、响应速度快、转矩大等。
这些优点使得直线电机进给伺服系统在数控机床中的应用越来越广泛。
由于直线电机本身的特点以及伺服系统的复杂性,对其进行动态特性分析与研究具有很大的挑战性。
本文将对数控机床直线电机进给伺服系统的动态特性进行深入研究,以期为实际应用提供理论依据和技术支撑。
1.1 研究背景随着现代制造业的快速发展,数控机床在各个领域的应用越来越广泛。
数控机床的性能和精度对于提高产品质量、降低生产成本具有重要意义。
直线电机进给伺服系统作为数控机床的关键部件之一,其动态特性直接影响到数控机床的加工精度、速度和稳定性。
研究数控机床直线电机进给伺服系统的动态特性,对于提高数控机床的整体性能具有重要的现实意义。
传统的数控机床进给伺服系统主要采用步进电机驱动,虽然在一定程度上满足了加工需求,但其动态特性较差,如速度响应慢、加速度范围窄、负载能力有限等。
这些问题限制了数控机床在高速、高精度加工方面的应用。
随着直线电机技术的不断发展,直线电机进给伺服系统逐渐成为数控机床领域的研究热点。
直线电机具有功率密度高、加速度响应快、速度快、转矩大等优点,可以有效提高数控机床的性能。
由于直线电机进给伺服系统涉及到多个学科领域,如电机学、控制理论、机械设计等,因此对其动态特性的研究具有较高的难度。
本论文旨在对数控机床直线电机进给伺服系统的动态特性进行分析与研究,以期为提高数控机床的性能和稳定性提供理论依据。
伺服系统Matlab仿真教学指导
40
800
30 600
20 400
10
200 0
-10
0
0 0.005 0.01 0.015 0.02 0.025 0.03 0 0.005 0.01 0.015 0.02 0.025 0.03
图4-16 工程设计参数下的q轴电流 i q
(P=0.86,I=0.25)
0
35
-200
30 -400
25
20
-600
15 -800
10 -1000
5
0
-1200
0
0.005
0.01
0.015
0.02
0.025
0.03
0
0.005
0.01
0.015
0.02
0.025
基于永磁同步电机伺服系统的控 制算法和仿真分析
伺服系统Matlab仿真教学指导
1.1 引言
第一章 绪 论
位置环
永磁同步电动机伺服系统 转速环
电流环
伺服系统Matlab仿真教学指导
1.2 交流伺服控制策略的现状 开环恒压频比控制 矢量控制理论
交流伺服控制策略 直接转矩控制 滑模变结构控制 自适应控制
伺服系统Matlab仿真教学指导
4.3.2 伺服系统仿真方案
表2 伺服系统无扰动下仿真方案
空载
负载
(7 N m)
iq m iq
m
工程设计参数( P=0.86,I=0.25)
图
图
图
图
4-16 4-17 4-22 4-23
经验参数
图
图
图
图
(P=10,I=2) 4-18 4-19 4-24 4-25
MATLAB仿真在数控伺服系统轮廓误差分析中的应用

图 1 数控系统伺服结构
因电流环参数不能修改 , 这里将电流环简化为一 比例环节 。 为分析方便 , 可将速度环简化为一惯性环节 , 等 效伺服系统结构如图 2 所示 。
图 3 加工直线轮廓的误差 图 2 等效伺服系统结构
跟随误差 :
收稿日期 : 2008 - 06 - 13 作者简介 : 陈芳 ( 1977 —) , 女 , 汉族 , 湖南桃源人 , 讲师 , 研究方向为数控技术应用 、数控设备维修 , 主要从事教学、科研 工作 , 已发表论文 9篇 。电话 : 13265558955, 0755 - 26731821, 0755 - 26731821。 E - mail: chenfangsz@oa1 szp t1net。
2 ( R + r) K
。
当 Kx ≠Ky 时 , ε随着 φ发生变化 , 所加工的圆 弧将产生形状误差 。当 Kx 与 Ky 差别不是很大时 , 可 忽略第一项中 φ对 ε的影响 , 而第二项的 大小 与 φ成正比 。因此所加工的圆弧将变成长轴位于 sin2 [5 ] 45 ° 或 135 ° 处的椭圆 。 3 MATLAB 建模与仿真 311 直线轮廓加工的 MATLAB 模型 图 5 所示为直线轮廓加工的 MATLAB 模型 。设 x、 y 轴给定速度信号 v = 10, 则给定位置指令为斜坡 信号 , 斜坡斜率为 10; x 轴开环增益 Kx = 30, y 轴开 环增益 Ky = 15; 计算轮廓误差 ε =
Jun12009 Vol137 No16
MAT LAB 仿真在数控伺服系统轮廓误差分析中的应用
陈芳
(深圳职业技术学院 , 广东深圳 518055 )
摘要 : 分析了数控系统的伺服结构 , 根据数控伺服系统模型的传递函数 , 从数学上分析了直线轮廓和圆弧轮廓数控加 工的轮廓误差 。利用 MATLAB 的 SI MUL I N K对数控伺服系统进行了建模 , 分别给出了直线轮廓加工 、圆弧轮廓加工和螺旋 线轮廓加工的轮廓误差仿真图形 。该仿真结果与数学分析计算结果一致 。 关键词 : 仿真 ; 数控伺服系统 ; 轮廓误差 中图分类号 : T M921154 文献标识码 : A 文章编号 : 1001 - 3881 ( 2009 ) 6 - 225 - 2
基于MATLAB的数控进给伺服系统设计与仿真
文章编号:1009-671X(2005)01-0001-03基于M AT LAB 的数控进给伺服系统设计与仿真董玉红,张立勋(哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001)摘 要:利用M AT L AB 控制系统工具箱中的SISO 设计器设计了数控进给伺服系统.在建立了直流电机和进给系统的数学模型后,根据数控伺服系统的性能要求,使用SISO 设计器设计了进给伺服系统的校正补偿器,得到了反映系统性能的特性曲线和Simulink 仿真模型,并根据仿真模型验证了系统设计的正确性.该项研究对伺服系统的性能分析及用根轨迹法设计控制系统具有一定的参考价值.关 键 词:M AT L AB;伺服系统;SISO 设计器;仿真中图分类号:T P272 文献标识码:A收稿日期:2004-06-08.作者简介:董玉红(1965-),女,副教授,主要研究方向:机械电子工程.Design and simulation of NC feed servo system by MATLABDONG Yu -hong,ZHANG L-i xun(School of M echanical and Electrical Engineering,Harbin Eng ineering U niversity,Harbin 150001,China)Abstract:NC feed servo system w as designed by applying SISO designer in MAT LAB control system too-l box.After m athematic models of DC motor and feed system w ere built up,a kind of com pensator was de -vised according to performance requirements of NC servo system.Characteristic curves of the system re -sponses and Simulink simulation model w ere obtained and the design w as verified by the model.This study prov ides a reference for analy zing performances of servo system and applying root locus method to design control system.Key words:M ATLAB;servo system;SISO designer;simulation 数控伺服系统是以机床移动部件的位移和速度为控制对象的自动控制系统,它的作用是接受数控系统发出的进给速度和位置指令信号,经转换放大后,由伺服驱动装置和机械传动机构驱动机床的工作台实现进给运动.伺服系统是数控机床的重要组成部分,包括主运动伺服系统和进给伺服系统,进给伺服系统的性能在很大程度上决定了数控机床的加工精度与质量.本文使用M ATLAB 中的SISO 设计器设计了进给伺服系统,在SISO 设计器中可以根据系统的根轨迹和开环伯德图方便地添加零极点,改变系统零极点的位置,从而使伺服系统的稳态和动态性能满足设计要求.1 数控进给伺服系统的模型数控进给伺服系统如图1所示.对于永磁直流电动机,其微分方程式为[1]图1 数控进给伺服系统第32卷第1期 应 用 科 技 Vol.32, .12005年1月 Applied Science and Technology Jan.2005L a=d i a(t)d t+R a i a(t)=u a(t)-e b(t),e b(t)=K b M(t),T M=K T i a(t),(1) Jd M(t)d t+B M(t)=T M.式中:L a为电枢回路的电感,R a为电枢回路的总电阻,i a(t)为电枢回路的电流,u a(t)为电枢回路的控制电压,e b(t)为电机的反电动势,K b为电机反电动势常数, M为电机输出转速,T M为电机输出力矩,K T为电机转矩常数,J为折算到电机轴上的总转动惯量,B为折算到电机轴上的总粘性阻尼系数.若设功率放大器的增益为K a,电机的输出转角为 o1,将式(1)进行拉氏变换,整理可得直流电机的传递函数为G m= o1(s)X i(s)=K a K Ts(L a s+R a)(Js+B)+K T K b s .(2)若考虑直流电机电感很小,可忽略不计时,则式(2)变为G M(s)=K a K ts(Js+B)+K T K b s.(3)减速齿轮、丝杠螺母进给系统的传递函数为[1]G J(s)=X o(s) o1(s)=z1 z2 L22ns2+2 n s+ 2n.(4)式中:z1,z2,L为齿轮1,2的齿数和丝杠导程, n=kJ为进给系统的无阻尼固有频率, = B2Jk为进给系统的阻尼比.当直流电机及进给系统的各参数取值为: L a=0 0018,R a=1 36,K a=5,K T=K b= 0 025,J=1 07 10-4,B=4 3 10-4,z1/z2= 1/2,L=4mm, =0 5, n=100,时,直流进给伺服系统的传递函数为G(s)=G M(s)G J(s)=37500s(s3+162.5s2+16250s+625000).(5)2 数控进给伺服系统设计SISO设计器是MATLAB控制系统工具箱所提供的一个非常强大的单输入单输出线性系统设计器,它为用户设计单输入单输出线性控制系统提供了非常友好的图形界面.在SISO设计器中,设计者可以同时使用根轨迹图与开环伯德图,通过添加或改变系统补偿器的零极点以及增益等参数实现对单输入单输出控制系统的设计[2].首先在MATLAB命令窗口中键入: siso-tool启动SISO设计器.在默认情况下,SISO设计器同时启动系统根轨迹编辑器与开环伯德图编辑器.然后在MATLAB命令窗口中键入被控对象(plant)为: G=tf(37500,[1162.5162506250000])输入系统数据.接着在SISO设计器的file下输入系统的数据,并选择控制系统结构,则在SISO设计器中就绘出了被控对象的根轨迹和开环伯德图,如图2所示.图2 被控对象的根轨迹和开环伯德图在图2中,可以通过添加或拖动补偿器的零极点,或拖动根轨迹中的方块改变系统增益等办法,来改变进给系统的特性.根据被控对象的传递函数中含有积分环节,且由图2中的开环伯德图可知,被控对象稳定性及准确性较好,但其快速性要求不能得到满足.在此设计超前校正补偿器来改善系统的动态性能,提高系统的快速性.添加补偿器零点在其极点的右侧,并调整增益,得到补偿器C(s)传递函数和设计后系统的根轨迹、伯德图,如图3所示.从图3中的开环伯德图可知,系统仍然具有较好的稳定性.系统设计完成以后,可以使用M ATLAB中的线性时不变浏览器LTI View er绘制系统的阶2应 用 科 技 第32卷图3 设计补偿器后系统的根轨迹和开环伯德图跃响应、脉冲响应、开环伯德图等特性曲线,如图4所示.根据被设计系统的这些特性曲线可知,系统具有很好的准确性、稳定性和快速性.图4 用LT I 浏览器绘制的系统特性曲线3 数控进给伺服系统仿真SISO 设计器还提供了与Simulink 集成的方法,可以直接生成被设计系统的Simulink 仿真模型.在模型生成之前,必须保存线性系统的被控对象、补偿器以及传感器等LT I 对象至MAT -LAB 工作空间中.生成数控进给伺服系统的Simulink 模型如图5所示,由此便可以对设计好的系统的系统进行仿真,验证系统设计的正确性.图6是仿真模型加上阶跃输入信号的响应曲线,比较图6与图4中的阶跃响应曲线,就可以验证系统设计的正确性.图5 系统的Simulink模型图6 系统Simulink 模型的阶跃特性曲线4 结 论本文利用MATLAB 控制系统工具箱中的SISO 设计器设计了数控进给伺服系统,使系统满足准确性、稳定性和快速性的要求.在设计的过程中,不仅得到了补偿器的传递函数,而且还得到了反映系统性能的特性曲线以及系统的Simulink 仿真模型,并通过仿真模型验证了系统设计的正确性.本文的研究对伺服系统的性能分析及用根轨迹法设计控制系统具有一定的参考价值.参考文献:[1]董玉红,杨清梅.机械控制工程基础[M ].哈尔滨:哈尔滨工业大学出版社,2003.[2]姚 俊,马松辉.Simulink 建模与仿真[M ].西安:西安电子科技大学出版社,2002.[责任编辑:李雪莲]3 第1期 董玉红,等:基于M ATLAB 的数控进给伺服系统设计与仿真。
基于Matlab_Simulink数控伺服系统的建模仿真
文章编号:1001-2265(2006)08-0067-03收稿日期:2006-02-27 3基金项目:广东省自然科学基金资助项目(32364);广东省高教厅基金资助项目(Z02067)作者简介:王小东(1981—),男,内蒙古赤峰人,五邑大学机电工程系硕士研究生,研究方向为数控系统及其仿真,(E -mail )wangxiaodong1816@ 。
基于Matlab /Si m ulink 数控伺服系统的建模仿真3王小东,王大承(五邑大学机电工程系,广东 江门 529020)摘要:利用M atlab /Si m ulink 软件,通过对永磁同步电机(P M S M )本体、d /q 坐标系向a /b /c 坐标系转换、三相电流源逆变器等功能模块建立与组合,构建了永磁同步电机控制系统的速度和电流双闭环仿真模型。
根据数控伺服系统的性能要求,进行参数选择及仿真。
仿真结果证明了该系统模型的有效性,为数控伺服控制系统的设计和调试提供了理论基础。
关键词:M atlab /Si m ulink;数控伺服系统;永磁同步电机;仿真中图分类号:TP273 文献标识码:AS i m ul a ti on and M odeli n g of P M S M Ba sed on M a tl abWANG Xiao 2dong,WANG Da 2cheng(Depart m ent of Mechanical and Electrical Engineering,W uyi University,J iang men Guangdong 529020,China )Abstract:I n Matlab /Si m ulink,the bl ocks,such as P MS M bl ock,coordinate transfor mati on f or med q /d t o a /b /c bl ock,three phase current s ource inveter contr oller bl ock,etc .have been modeled .By the organic combi 2nati on of these bl ocks,t w o contr ol l oop s are used .The para meters are chosed by the perf or mance of servo sys 2te m.The reas onability and validity have been testified by si m ulate result and this novel method offers a ne w thought for designing and debugging actual mot or .Key words:Matlab /Si m ulink,NC servo syste m;P MS M ,si m ulati on0 引言数控机床的伺服系统一般由电流环和速度环组成[1]。
MATLAB电液位置伺服控制系统设计及仿真教案资料
M A T L A B电液位置伺服控制系统设计及仿真数控机床工作台电液位置伺服控制系统设计及仿真姓名:雷小舟专业:机械电子工程子方向:机电一体化武汉工程大学机电液一体化实验室位置伺服系统是一种自动控制系统。
因此,在分析和设计这样的控制系统时,需要用自动控制原理作为其理论基础,来研究整个系统的动态性能,进而研究如何把各种元件组成稳定的和满足稳定性能指标的控制系统。
若原系统不稳定可通过调整比例参数和采用滞后校正使系统达到稳定,并选取合适的参数使系统满足设计要求。
1 位置伺服系统组成元件及工作原理数控机床工作台位置伺服系统有不同的形式,一般均可以由给定环节、比较环节、校正环节、执行机构、被控对象或调节对象和检测装置或传感器等基本元件组成[1]。
根据主机的要求知系统的控制功率比较小、工作台行程比较大,所以采用阀控液压马达系统。
系统物理模型如图1所示。
图1 数控机床工作台位置伺服系统物理模型系统方框图如图2所示。
图2 数控机床工作台位置伺服系统方框图数控机床工作台位置伺服系统是指以数控机床工作台移动位移为控制对象的自动控制系统。
位置伺服系统作为数控机床的执行机构,集电力电子器件、控制、驱动及保护为一体。
数控机床的工作台位置伺服系统输出位移能自动地、快速而准确地复现输入位移的变化,是因为工作台输出端有位移检测装置(位移传感器)将位移信号转化为电信号反馈到输入端构成负反馈闭环控制系统。
反馈信号与输入信号比较得到差压信号,然后把差压信号通过伺服放大器转化为电流信号,送入电液伺服阀(电液转换、功率放大元件)转换为大功率的液压信号(流量与压力)输出,从而使液压马达的四通滑阀有开口量就有压力油输出到液压马达,驱动液压马达带动减速齿轮转动,从而带动滚珠丝杠运动。
因滚珠丝杠与工作台相连所以当滚珠丝杠 运动时,工作台也发生相应的位移。
2数控工作台的数学模型 2.1 工作台负载分析工作台负载主要由切削力c F ,摩擦力f F 和惯性力a F 三部分组成,则总负载力为:a f c L F F F F ++=2.2液压执行机构数学模型工作台由液压马达经减速器和滚珠丝杠驱动。
matlab伺服系统仿真
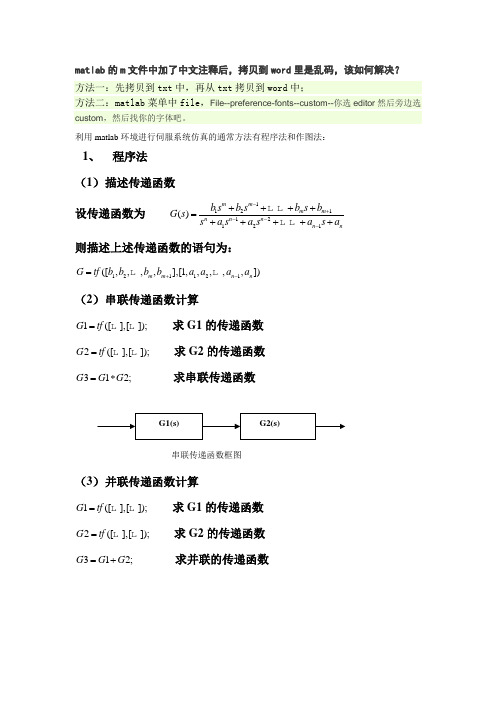
matlab 的m 文件中加了中文注释后,拷贝到word 里是乱码,该如何解决? 方法一:先拷贝到txt 中,再从txt 拷贝到word 中;方法二:matlab 菜单中file ,File--preference-fonts--custom--你选editor 然后旁边选custom ,然后找你的字体吧。
利用matlab 环境进行伺服系统仿真的通常方法有程序法和作图法:1、 程序法 (1) 描述传递函数设传递函数为 112112121()m m m m n n n n nb s b s b s b G s s a s a s a s a -+---++++=+++++ 则描述上述传递函数的语句为:121121([,,,,],[1,,,,,])m m n n G tf b b b b a a a a +-=(2) 串联传递函数计算1([],[]);G tf = 求G1的传递函数 2([],[]);G tf = 求G2的传递函数 312;G G G =* 求串联传递函数(3) 并联传递函数计算1([],[]);G tf = 求G1的传递函数 2([],[]);G tf = 求G2的传递函数 312;G G G =+ 求并联的传递函数串联传递函数框图(4) 求闭环传递函数1([],[]);G tf = 求G1的传递函数 2([],[]);G tf = 求G2的传递函数(1,2);GB feedback G G =闭环系数只与G1,G2相关(5) 求阶跃响应1([],[]);G tf = 求G1的传递函数step(G1) 求G1的单位阶跃响应 (6) 求频率特性1([],[]);G tf = 求G1的传递函数bode(G1); 求G1的幅频特性和相频特性 (7) 求稳定裕度闭环传递函数框图并联传递函数框图1([],[]);G tf = 求G1的传递函数margin(G1); 求G1的幅值裕度和相位裕度 例题一:闭环传递函数与G1无关G1=tf([0.06],[0.0000024,1]); G2=tf([0.0044,1],[0.0002,0]); G3=tf([28],[0.0001,1]); G4=tf([0.6],[0.005,1]); G5=tf([0.06],[0.0000024,1]); GK=G1*G2*G3*G4; figure; bode(GK); grid ontitle('开环特性曲线');GB=feedback(G2*G3*G4,G5); figure bode(GB); grid ontitle('闭环特性曲线'); figure step(GB); grid ontitle('阶跃响应');G1G2G3G4例题2:G1=tf([0.15,1],[0.051,0]);G2=tf([70],[0.0067,1]);G3=tf([0.21],[0.15,1]);G4=tf([0.1],[0.01,1]);GB1=feedback(G1*G2*G3,G4);G5=tf([0.17,1],[0.085,0]);G6=tf([1],[0.01,1]);G7=tf([0.0044],[0.01,1]);G8=tf([130],[1,0]);GK=G5*G6*GB1*G7*G8; %求开环传递函数figurebode(GK); %求开环频率特性grid on %打坐标title('开环频率特性曲线');figure;margin(GK); %求幅值裕度与相位裕度GB=feedback(G5*G6*GB1*G8,G7); %求闭环传递函数bode(GB); %求闭环频率特性grid ontitle('闭环频率特性曲线');figure;margin(GB);step(GB);grid ontitle('阶跃响应特性曲线');2、作图法利用Matlab提供的SIMULINK动态系统仿真环境进行仿真。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数控机床伺服进给系统的分析及MATLAB/simulink仿真
摘要:
现在数控机床进给速度和加工效率不断提高,这务必会使扰动作用加大使伺服进给精度降低,本文分析了扰动作用下数控进给系统的稳态误差,并提出了用前馈补偿控制的方法消除稳态误差的措施。通过simulink仿真验证此措施的正确性。
图6前馈控制系统框图
图中Gc(s)为前馈补偿控制器
在没有输入的情况下可以将系统框图等效为如图7所示Leabharlann N(s)X()--
图7等效形式
由图7可得:
(5)
由式(5)可知,当 时,Ge( s ) =0,即扰动作用下稳态误差为零。可见通过前馈控补偿后,系统的误差大大减少。
5、扰动作用下进给系统稳态误差消除的S I M U/L I N K动态仿真
1、数控机床的轨迹控制原理
数控机床的轨迹控制由插补器和进给伺服系统完成。如图1是二坐标机床结构图。数控加工程序定义了工件轮廓的形状F(X,Y) (直线、圆弧、样条等)、起点Pb、终点Pe和进给速度F。插补器根据这些指令,实时计算出轮廓控制点的位置Pi( Xi, Yi)。Xi和Yi是时间序列函数,i = 0 , 1 , 2…。Xi和Yi是进给系统输入的指令值,分别控制机床X,Y轴方向的移动。
非笔试课程考核报告
(以论文或调研报告等形式考核用)
2013至2014学年第2学期
考核课程:系统建模分析与仿真
提交日期:2014年6月23日
报告题目:数控机床伺服进给系统的分析及MATLAB/simulink仿真
姓名XXXXXX
学号**********
年级13级研究生
专业机械电子工程
所在学院机电工程学院
R(s)++X(s)
--
图3进给系统结构框图
图3中:
G1(s)=k1,Gs(s)=k2G’s(s)=kn,Hp(s)=kp,Hv(s)=kv,G2(s)=k2
,
根据进给系统的结构框图可得到系统的传递函数
其中:
k1为位置调节器增益;kp为位置反馈系数;kn为速度放大器增益;kv为速度反馈系数;km为电动机的力矩系数;ks为机械传动郊件的扭转刚度;kE为电机的反电动势系数;LA为电枢回路电感;RA为电枢回路总电阻;JM为电机轴上的转动惯量;Js为丝杠的折算转动惯量;fm为电动机粘性阻尼系数;fs为阻尼系数;Ls为丝杠的导程。
有图5所示的框图可得:
(1)
即 (2)
可求得扰动作用下进给系统的稳态误差:
(3)
(4)
结果表明在扰动输入下,进给系统产生的稳态误差的大小与负载扰动作用点前的传递函数的放大倍数成反比。
4、扰动作用下进给系统稳态误差的消除
从上面的分析可知,进给系统扰动作用下的稳态误差只与扰动作用点之前的结构和参数有关。至于扰动作用点后的增益的大小与是否有积分环节,它们均对减少或消除扰动引起的稳态误差没有影响。要减小或消除扰动输入引起的稳态误差,必须增加扰动点以前的控制器放大倍数或设置积分环节。对于本文给出的数控进给系统,当存在扰动输入N ( s )时,可以采用前馈控制来消除扰动输入引起的稳态误差。如图6所示,把扰动输入N ( s )经补偿装置G(s)送到输入端与给定输入信号共同控制系统,即实现前馈控制。
F(x,y),pb,pe,FX
--
图2伺服系统原理图
(2)进给系统传递函数
对进给系统的数学描述,实际上就是首先建立系统各个环节的传递函数,然后求出整个系统的传递函数。这里以直流伺服电机驱动和直线位移检测器为反馈元件的闭环伺服系统为例,建立数学模型,得出进给系统的传递函数[2],进给系统的传递函数结构图如图3所示。
关键词:进给系统;稳态误差;simulink
引言
进给系统是数控机床最重要的组成部分,直接影响数控机床的性能。数控机床对进给系统的性能指标可以归纳为:定位精度要求高、跟踪指令信号的相应要快、系统的稳定性要好[1]。可见定位精度是衡量进给系统性能的重要指标。进给系统在理想状态的定位精度也是系统的稳定性能指标—伺服精度,因此,研究进给系统的伺服精度十分重要。本文将用控制系统的分析方法来讨论数控进给系统的伺服精度。
根据图5所示的系统结果框图,取G1(s)=10, ,首先分析其稳定性,借助MATLAB工具画出其根轨迹如图8所示。
图8根轨迹图
分析图8可知进给系统为稳定的,然后可以建立进给系统的S I M U L I N K仿真模型如图9所示。
图9没有前处理扰动作用下的simulink仿真模块
根据图6进给系统的结构框图,建立引入前馈控制后进给系统的仿真模型,如图10所示。在图7中引入P I D环节作为前馈控制器,选取K p = 0.1,KI= 0,KD= 0以满足Gc( s ) =1/G1( s )
F(x,y),pb,pe,FXi,Yi控制工作台按
程序设定轨迹运动
图1二坐标机床控制原理图
本文重点研究的是插补器后面的进给系统的伺服精度。
2、进给系统数学描述
(1)典型伺服进给系统的组成环节
这里以由晶闸管控制直流电动机驱动,并采用直流位移检测器为位置检测元件的双闭环伺服进给系统进行讨论。分为:比较环节、校正环节—调节器、检测环节(位置检测、速度检测)、整流环节、伺服电动机、机械传动环节,直流电动机伺服驱动的伺服系统原理如图2
从控制论可知,高阶系统过渡过程的数学表达式是由一些指数项和衰减项组成。如果在这些表达式中,有一些项的影响很小,可以将其忽略,则这个系就可以用一个低阶系统来近似。在工程上,通常把高阶系统近似于一阶系统或二阶系统。对于上述的数控进给系统,直线电动机可取LA= 0,则RA= 0;机械传动装置可以忽略折算惯量Js和折算阻尼fs,则 。所以上述进给系统可近似为一个二阶系统。该系统的方框图如图4所示。
图10前处理后扰动作用下的simulink仿真模块
比较图9和图10中Dispay输出的结果可见采用前馈补偿后进给系统的伺服精度得到了很大的提高。
6结论
利用控制工程原理,对进给系统的数学模型进行了简化。对扰动作用下进给系统的稳态误差进行了分析,得出了扰动作用下进给系统的稳态误差及在扰动作用下稳态误差与进给系统结构和参数之间的关系,并提出了用前馈控制的方法消除稳态误差的措施。通过S IMULINK仿真进一步验证了此方法的正确性。
R(s)X(s)
+
图4近似系统方框图
图4中
3扰动作用下进给系统的伺服精度分析
进给系统伺服精度是指系统稳态时指令位置与实际位置的偏差,反映了系统的稳态质量,用稳态误差来衡量。影响伺服精度的因素有两类,一是位置测量误差,二是系统误差。系统误差与输入信号的形式和大小、系统的结构和参数有关。在进给系统中常用两种典型的输入信号:位置阶跃输入和斜坡输入。除上面两种给定的输入信号外,作用于系统的信号还有扰动输入伸。在这里主要讨论扰动输入时进给系统的稳态误差。
根据控制工程理论,线性系统在正常输入和扰动输入下的输出符合线性系统的叠加原理。故求扰动信号作用下的稳态误差时,可令R ( s ) = 0,便可求得扰动信号作用下的稳态误差essN,图5即为扰动信号作用下进给系统的框图。
图5扰动存在时系统框图
图5中:
由E(s)=R(s)-X(s),R(s)=0,可得E(s)=-X(s)
【5】科技产品研发中心.MATLAB7辅助控制系统设计与仿真[ M].北京:电子工业出版社,2005.
参考文献
【1】王爱玲,白恩远,等.现代数控机床[ M].北京:国防工业出版社,2003.
【2】艾兴,等.高速切削加工技术[ M].北京:国防工业出版社,2004.
【3】杨有君.数字控制技术与数控机床[ M].北京:机械工业出版社,1999.
【4】王益群,等.机械控制工程基础[ M].武汉:武汉理工大学出版社,2001.