直流电机的转速检测与脉宽调速器
直流电动机有哪几种调速方法各有哪些特点答:直流电动机有三种
直流电动机有哪几种调速方法?各有哪些特点?答:直流电动机有三种调速方法:1)调节电枢供电电压U ;2)减弱励磁磁通Φ;3)改变电枢回路电阻R 。
特点:对于要求在一定范围内无极平滑调速的系统来说,以调节电枢供电电压的方式为最好。
改变电阻只能有级调速;减弱磁通虽然能够平滑调速,但调速范围不大,往往只是配合调压方案,在基速(额定转速)以上作小范围的弱磁升速。
晶闸管—电动机系统当电流断续时机械特性的显著特点是什么?答:电流断续时的电压、电流波形图(Ⅰ10P 、Ⅱ 12P )(三相零式为例)。
断续时,0d u 波形本身与反电势E 有关,因而就与转速n 有关,而不是像电流连续时那样只由控制角α决定的常值。
机械特性呈严重的非线性,有两个显著的特点:第一个特点是当电流略有增加时,电动机的转速会下降很多,即机械特性变软。
当晶闸管导通时,整流电压波形与相电压完全一致,是电源正弦电压的一部分。
当电流断续后,晶闸管都不导通,负载端的电压波形就是反电势波形。
电流波形是一串脉冲波,其间距为︒120,脉冲电流的底部很窄。
由于整流电流平均值d I 与电流波形包围的面积成正比,如果电流波形的底部很窄,为了产生一定的d I ,各相电流峰值必须加大,因为RE u i d d -=,而整流输出的瞬时电压d u 的大小由交流电源决定,不能改变。
也就是说应使E 下降很多即转速下降很多,才能产生一定的d I ,这就是电流断续时机械特性变软的原因。
第二个特点是理想空载转速0n 升高。
因为理想空载时0=d I ,所以2m a x 02U u E d ==,所以0n 升高。
简述直流PWM 变换器电路的基本结构。
答:直流 PWM 变换器基本结构如图所示,包括 IGBT 和续流二极管。
三相交流电经过整流滤波后送往直流 PWM 变换器,通过改变直流 PWM 变换器中 IGBT 的控制脉冲占空比来调节直流 PWM 变换器输出电压大小,二极管起续流作用。
Ug0Ton T t 直流PWM 变换器基本结构直流PWM 变换器输出电压的特征是什么?答:频率一定、宽度可调的脉动直流电压。
直流伺服电动机脉宽调制的工作原理
直流伺服电动机是一种广泛应用于工业控制系统中的电动机,其主要特点是控制精度高、速度范围广、响应速度快等。
而脉宽调制(PWM)技术是一种常用的电力控制技术,通过调整脉冲宽度来控制输出电压,被广泛应用于直流伺服电动机的速度和位置控制中。
本文将介绍直流伺服电动机脉宽调制的工作原理,包括脉宽调制原理、直流伺服电动机的工作原理、脉宽调制在直流伺服电动机中的应用等内容。
一、脉宽调制原理脉宽调制技术是一种通过调制脉冲信号的宽度来控制输出电压或电流的技术。
其基本原理是将输入信号与一个高频的载波信号进行调制,通过改变调制信号的脉冲宽度,来实现对输出信号的控制。
脉宽调制技术可以实现对输出信号的精确控制,并且具有简单、成本低廉、效率高等优点,因此被广泛应用于各种电力控制领域。
二、直流伺服电动机的工作原理直流伺服电动机是一种能够精确控制角度、速度和位置的电动机,其主要由电动机、编码器和控制器组成。
控制器通过不断地监测编码器反馈的位置信息,计算电机与期望位置之间的误差,并输出控制信号来调节电机的速度和位置,从而实现对电机的精确控制。
三、脉宽调制在直流伺服电动机中的应用脉宽调制技术被广泛应用于直流伺服电动机的速度和位置控制中,其工作原理如下:控制器根据输入的期望速度或位置信号,计算出电机的转速或角度误差,然后将误差信号传递给脉宽调制模块。
脉宽调制模块通过调整输出脉冲信号的宽度和周期,控制电机的转速和位置,从而实现对电机的精确控制。
四、脉宽调制在直流伺服电动机中的优势脉宽调制技术在直流伺服电动机中具有以下优势:1. 精确控制:脉宽调制技术可以实现对电机的精确控制,包括速度、角度和位置的精确控制。
2. 响应速度快:脉宽调制技术可以实现对电机的快速响应,提高了系统的动态性能。
3. 节能减排:脉宽调制技术可以实现能效优化,降低了能耗,减少了环境污染。
4. 成本低廉:脉宽调制技术成本低廉,便于大规模应用。
五、总结脉宽调制技术在直流伺服电动机中的应用,实现了对电机的精确控制和高效能运行。
直流电动机的PWM调压调速原理

直流电动机的PWM调压调速原理
直流电动机的PWM调压调速是指通过调节脉宽调制(PWM)信号的占空比,控制直流电动机的电压和转速。
其原理是利用数字信号的高低电平与时间的对应关系,通过高电平和低电平的时间比例来控制脉冲信号的平均值,从而实现对电动机的调压和调速。
具体来说,PWM调压调速主要包括以下几个步骤:
1.信号发生器:使用微控制器或其他信号发生器产生一个固定频率的方波信号,通常频率为几千赫兹到几十千赫兹。
这个信号称为PWM基准信号。
2.调制器:通过控制占空比,将PWM基准信号转换为调制后的PWM信号。
占空比是指高电平持续的时间与一个周期的比值。
例如,占空比为50%的PWM信号表示高电平和低电平持续时间相等。
调制器可以是硬件电路或者软件控制的。
3.电压调节:将调制后的PWM信号经过滤波器平滑输出,形成电压调节信号。
滤波器通常使用低通滤波器,将PWM信号的高频成分滤除,得到平均电压。
4.转速控制:通过调节占空比,改变PWM信号的高电平时间,从而改变直流电动机的平均电压。
占空比越大,输出电压就越高;占空比越小,输出电压就越低。
5.转速反馈:为了实现闭环控制,通常需要通过传感器获取直流电动机的转速,并将转速信息反馈给调速控制器。
调速控制器会根据反馈信号与设定的转速进行比较,调节占空比控制电动机的转速。
总结起来,PWM调压调速原理就是通过调节PWM信号的占空比控制直流电动机的电压和转速。
通过改变占空比,可以改变PWM信号的高电平时间,从而改变电动机的平均电压和转速。
同时,结合转速反馈,可以实现封闭环控制,使电动机的转速能够与设定值保持一致。
直流脉宽调速系统

(2) 开关频率 f 应高于调速系统的最高频 率 fc,一般希望 f > 10fc,从而降低PWM 变换器的迟延时间对系统性能的影响;
2. 开关频率 f 的选择 (3) 开关频率 f 还应高于系统中所有回路 的谐振频率,防止引起共振;
(4) 开关频率 f 的上限受电力电子器件的 开关损耗和开关时间的限制。
2. 可逆PWM变换器 —— H型-双极式控制
+Us VT1 Ub1 A VT2 Ub2 Ub1 =Ub4 =-Ub2 =-Ub3 图2.108 H型可逆PWM变换器电路
4 VD1
+
M
2 VD3 B
VT3 Ub3
VD2
3
VD4 1
VT4 Ub4
电机正、反转时的输出波形
Ud id +Us Ud E id t 0 ton 3 4 T 3 4 3 4 3 t id E Ud -Us
脉宽调制器和PWM变换器的传递函数
开关频率 f 的选择 电能回馈与泵升电压的控制
1. 脉宽调制器和PWM变换器的传递函数
PWM系统的动态数学模型与V-M系统非常 相似,其传递函数也可以看作是一个纯滞后环 节,迟延时间最多不超过一个开关周期 T。 在脉宽调速系统中,开关频率 f 较高,开 关周期 T 较小,因此,常将脉宽调制器和 PWM变换器合起来近似看成一阶惯性环节。
双极式H型可逆PWM变换器的特点
优点:电流一定连续,可实现四象限运行,电机 停止时的微振交变电流可以消除静摩擦死区,低 速平稳性好,可达到很宽的调速范围; 缺点:四个电力电子器件都处于开关状态,损耗 较大,且容易发生上、下两个器件直通的事故, 降低了设备的可靠性。
2.9.3 脉宽调速系统的特殊问题
1-3 直流电动机的脉宽调制(PWM)调速
若VT1关断时间长,在t=t2时,电枢电流ia衰减 到零,那么在电动机内电势Ea的作用下,VT2导通, 电枢电流ia 将沿着相反的方向从B点流入A点,电机 进入能耗制动。通过控制VT2的时间间隔可以控制电 机的制动转矩 注意:在VT1重新导通之间,必须先关闭VT2, 让电枢电流经过VD1续流,电机短时进入再生制动状 态,否则在VT2还没有完全关断之前就让VT1导通, 电源经过VT2、VT1直接短路,损坏开关元件。
1、单极性脉宽调制方式 系统输出电压UA的极性是通过一个控制电压Uc 来改变的。 Uc为正,VT1与VT2交替导通,VT4一直导通, VT3关断,此时,B点总是为正,A点总是为负 Uc为负,VT3与VT4交替导通,VT2一直导通, VT1关断,此时,B点总是为负,A点总是为正
工作原理: Uc为正时 0<t<t1时,VT1导通,VT2关断,若Us>Ea, 电枢电流经VT1、VT4从B流到A,电机处在电动 机状态。 在t1<t<T时,VT1关闭,VD2与VT4续流,电枢 电流方向不变,电机仍处在电动机状态。 若在t1<t<T期间的某一时刻t2电枢电流衰减到 零,那么在t2<t<T期间,Ea使VT2导通,电枢电 流反向,经VT2、VD4从A流到B,电机进入能耗 制动状态 若Ea>Us,在VT2关断期间,电枢电流经VD1 和VD4输回电网,电机作再生制动 Uc为负时,原理与此类似,电机反向
如果电流连续,则电机始终处于电动状态 若在t1<t<T期间的某一时刻t2电枢电流衰减到 零,那么在t2<t<T期间,Us和Ea共同作用,使 VT2、VT3导通,电枢电流反向,经VT2、VT3从A 流到B,电机进入反接制动状态 在VT1、VT4再次导通之前,必须关断VT2、 VT3,电枢电流VD1、VD4续流,电机进入再生制 动
基于单片机的无刷直流电动机脉宽调速系统_孙艳霞
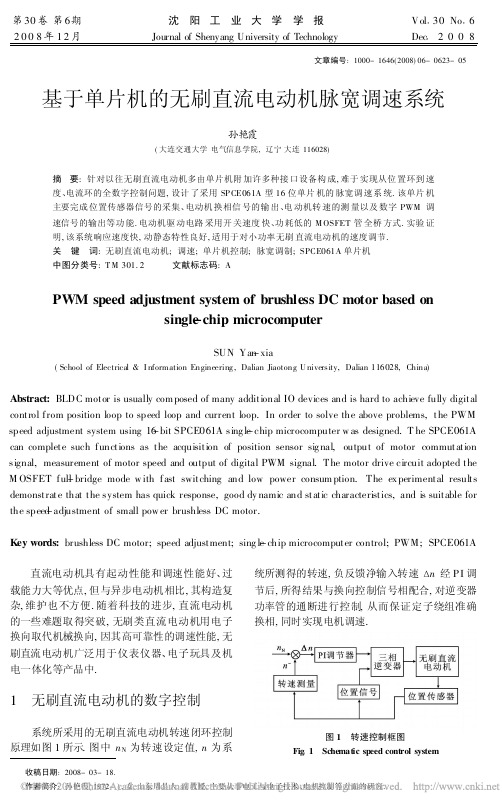
图 5 PI 调节算 法 Fig 5 PI adjustment algorithm
PI 调节器的脉冲3; K I
1 S
式中: K p KI T
Kp+
KI 2
T
Z+ 1 Z- 1
( 1)
孙艳霞
( 大连交通大学 电气信息学院, 辽宁 大连 116028)
摘 要: 针对以往无刷直流电动机多由单片机附 加许多种接 口设备构 成, 难于 实现从位 置环到 速
度、电流环的全数字控制问题, 设计 了采用 SP CE061A 型 16 位单片 机的 脉宽调 速系 统. 该单片 机
主要完成 位置传感器信号的采集、电动机 换相信 号的输 出、电 动机转 速的测 量以及 数字 PWM 调
无刷直流电动机的单片机脉宽调速是伴随着 数字控制技术发展起来的. 系统采用台湾凌阳公 司推出的 16 位单片机 SPCE061A 对其进行有效 控制.
无刷直流电动机的换相原理如图 2 所示, 定 子端盖内对称装有 3 个霍尔集成片作为转子传感 器, 随着转子永磁体的转动, 作用于位置传感器的 磁场方向 N- S 极交替变换, 使位置传感器产生相 差 120 的 H 1、H 2、H 3 方波, 有效的 6 个转态编码 信号: 101、100、110、010、011、001, 每一瞬间 有 2 个功率管导通, 每个功率管连续导通 120 电角度, 每隔 60 电角度定子绕组电流换相一次, 编码信号 发生变化的时刻也是定子绕组电流将要发生换相 的时刻.
本系统采用的是三相星型联结, 驱动主回路采 用二二导通方式, 共有 6 种导通状态, 转子每转过 60 电角度变换一种状态. 导通状态的转换通过软 件来完成, 即根据位置传感器的输出信号 H 1、H 2、 H 3, 不断地取相应的控制字送 IOB 口来实现.
PWM直流电机调速
PWM直流电机调速摘要本文首先简要介绍了直流小电机的实行方案最终选择方案一作为实施方案;然后介绍了PWM相关的原理脉冲宽度调制(PWM)是英文“Pulse Width Modulation”的缩写,简称脉宽调制。
它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
之后详细设计了基于MCS-51 单片机的直流小电机PWM调速的系统硬件电路以及各电路硬件说明目前单片机渗透到我们生活的各个领域,几乎很难找到哪个领域没有单片机的踪迹。
导弹的导航装置,飞机上各种仪表的控制,计算机的网络通讯与数据传输,工业自动化过程的实时控制和数据处理,广泛使用的各种智能IC卡,民用豪华轿车的安全保障系统,录象机、摄象机、全自动洗衣机的控制,以及程控玩具、电子宠物等等,这些都离不开单片机。
更不用说自动控制领域的机器人、智能仪表、医疗器械了。
因此,单片机的学习、开发与应用将造就一批计算机应用与智能化控制的科学家、工程师。
单片机广泛应用于仪器仪表、家用电器、医用设备、航空航天、专用设备的智能化管理及过程控制等领域,;最后是实现直流小电机PWM直流调速系统软件设计,附录有相关的系统源程序。
关键词PWM,单片机,直流电机AbstractThis article first briefly introduced as soon as directs current the small electrical machinery to implement the plan the selection scheme to take the implementation plan finally; Then introduced the PWM related principle The pulse width modulation (PWM) is English “Pulse Width Modulation” abbreviation, abbreviation pulse-duration modulation. It is loses using microprocessor's digit carries on the control to the analogous circuit one kind of very effective technology, widely applies in the survey, the correspondence, the power control and the transformation and so on many domains.the pulse width modulation (PWM) is one kind carries on the digital coding to the simulated signal level the method. Through the high resolution counter's use, the square-wave dutyfactor is modulated uses for to carry on to a concrete simulated signal level the code.; Afterward detailed design based on MCS-51 monolithic integrated circuit's direct-current small electrical machinery PWM velocity modulation system hardware electric circuit as well as various electric circuits hardware explanation; Finally is realizes directs current the small electrical machinery PWM cocurrent velocity modulation system software design, the appendix has the relatedsystem source program.key word:PWM monolithic integrated circuit direct current machine目录摘要 (I)Abstract (II)第1章绪论 (1)第2章方案论证 (3)2.1总体方案论证 (3)2.2 PWM的基本工作原理 (5)2.3 直流电动机转速控制系统的工作原理 (5)2.4 PWM码简介及解码原理 (6)第3章系统硬件电路设计 (7)3.1电源电路设计 (7)3.2单片机最小应用系统的实现 (7)3.3 D/A转换接口电路设计 (10)3.3.1 DAC0832简介 (10)3.3.2 DAC0832与单片机的接口 (11)3.4功放电路 (12)3.4.1晶体三极管 (12)3.4.2基本放大电路的组成 (13)第4章系统软件电路设计 (14)4.1 软件实现方法 (14)4.2程序的基本组成 (14)4.2.1主程序设计 (14)4.2.2定时中断子程序设计 (15)结论 (20)致谢 (21)参考文献 (22)附录A (23)附录B (24)附录C (30)第1章绪论1.1 选题背景和目的直流电机脉冲宽度调制(Pulse Width Modulation-简称PWM)调速产生于20世纪70 年代中期,最早用于自动跟踪天文望远镜、自动记录仪表等的驱动,后来由于晶体管器件水平的提高及电路技术的发展, PWM 技术得到了高速发展,各式各样的脉宽调速控制器,脉宽调速模块也应运而生,许多单片机也都有了PWM输出功能。
直流脉宽调速实验报告
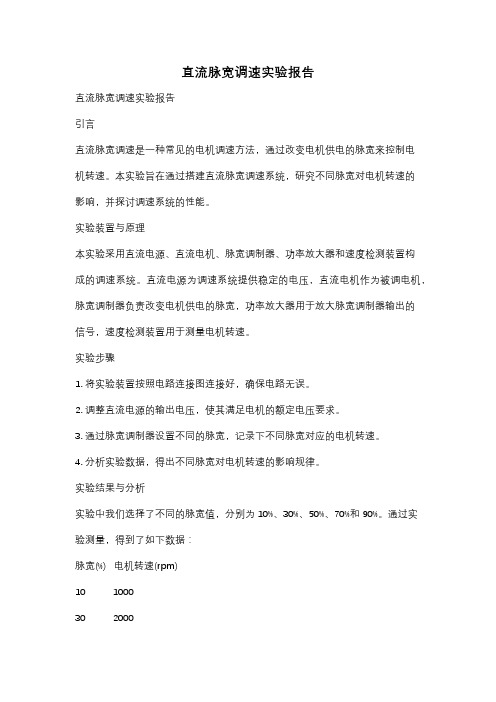
直流脉宽调速实验报告直流脉宽调速实验报告引言直流脉宽调速是一种常见的电机调速方法,通过改变电机供电的脉宽来控制电机转速。
本实验旨在通过搭建直流脉宽调速系统,研究不同脉宽对电机转速的影响,并探讨调速系统的性能。
实验装置与原理本实验采用直流电源、直流电机、脉宽调制器、功率放大器和速度检测装置构成的调速系统。
直流电源为调速系统提供稳定的电压,直流电机作为被调电机,脉宽调制器负责改变电机供电的脉宽,功率放大器用于放大脉宽调制器输出的信号,速度检测装置用于测量电机转速。
实验步骤1. 将实验装置按照电路连接图连接好,确保电路无误。
2. 调整直流电源的输出电压,使其满足电机的额定电压要求。
3. 通过脉宽调制器设置不同的脉宽,记录下不同脉宽对应的电机转速。
4. 分析实验数据,得出不同脉宽对电机转速的影响规律。
实验结果与分析实验中我们选择了不同的脉宽值,分别为10%、30%、50%、70%和90%。
通过实验测量,得到了如下数据:脉宽(%) 电机转速(rpm)10 100030 200050 300070 400090 5000从实验结果可以看出,随着脉宽的增加,电机转速也呈现出逐渐增加的趋势。
这是因为脉宽调制器改变了电机供电的脉宽,使得电机得到的平均电压增加,从而提高了电机的转速。
这种调速方法具有调节范围广、响应速度快等优点。
然而,脉宽调制器也存在一些问题。
首先,当脉宽过大时,电机容易受到过电压的损害,因此在实际应用中需要进行合理的限制。
其次,在低速调节时,脉宽调制器的分辨率较低,难以实现精确的调速效果。
因此,在实际应用中需要结合其他调速方法,如PID控制,来提高调速系统的性能。
结论通过本次实验,我们搭建了直流脉宽调速系统,并研究了不同脉宽对电机转速的影响。
实验结果表明,脉宽调制器能够有效地改变电机供电的脉宽,实现电机的调速。
但是,脉宽调制器在实际应用中还存在一些问题,需要综合其他调速方法来提高调速系统的性能。
总结直流脉宽调速是一种常见的电机调速方法,具有调节范围广、响应速度快等优点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:设计制作一个脉宽调速器,使其工作频率和占空比均可调节,频率调节范围3-5KHZ, 占空比调节范围为30-70%,选用额定电压为12V额定电流为0.5A的小直流电机,根据其参数设计出功率放大器,使之推动直流电动机工作,并用4位数码管显示出电动机每秒所转的圈数, 以监视电动机的调速情况.关键词:转速检测脉宽调速功率放大器数码管显示引言目前直流调速在工业生产中有相当广泛的应用,直流调速的转速比更大,可在全部的调速范围内都能获得良好的转矩特性。
放眼望去,交流电机占据了传动应用的绝大多数地盘,大有取代直流电机的趋势,但实际在许多场合人们仍在使用直流调速。
交流电机结构比直流电机简单,便于维护,价格低。
由于变频技术的发展,交流变频调速的性能越来越接近直流调速,因而人们更愿意使用交流变频调速。
众所周知,许多科学实验都离不开电,并且在这些实验中经常会对通电时间、电压高低、电流大小以及动态指标有着特殊的要求,.全数字直流调速装置,采用8位单片微机技术,性能优良,运行可靠,并且具极高的性能价格比. 设计方案的提出,更进一步说明了这类电机的好处直流电机产品是工业自动化,家庭现代化等各个领域广泛应用不可缺少的基础产品,与其它类型的电机相比,它具有良好的起动性能,且能在宽广的范围内平滑而经济地调速,过载能力较强,热动和制动转矩较大,因此直流电动机在起动和调速要求较高的生产机械上广泛地被应用。
随着人们生活水平迅速提高,对视听设备品质要求也在不断提高,这类产品为小功率直流电机提供了广阔市场,因此高精度控制直流电机转速成为发展的必然趋势。
电动机的转速是一个较为重要的运行参数,也有很多种用于测量转速的仪表,如:机械软轴式转速表、频率-电压转换式转速表、数字式转速表等,它们中间有的成本很高而且精度较差、有的工艺复杂而且可靠性不高。
本文介绍了一种利用单片机技术制成的智能转速表,不仅精度高、工艺简单、线路简洁,而且可靠性高、功能强。
当然本文中提到的软硬件设计方案,不能代表最佳方案,学习和掌握其基本原理,关心其发展,对于电机及其控制领域内工作和学习的人员都是有必要的。
在单片机控制电机的理论及应用发展得非常迅速. 因该设备未经过实物硬件的调试,所以难免存在着一些弊端,望老师给予指点。
.转速显示电路主要由脉冲放大及整形电路、单片机(80C51)、多路动态扫描LED显示电路构成一、电源简易稳压电源的制作课程设计最基本的电路是+5V/+12电源的取得,依据所设计的课题电源负载有不同的方式,基本上有以下几种:a.使用PC交换式电源:适合用大电流负载。
b.使用3只干电池:约4.5V电压,勉强可以推动8051电路,适合小电流负载。
c.使用7805稳压IC,适合用于一般的电流负载。
使用7805稳压IC,由市售的15V电源调整器来将市电220V转换为直流15V电源,经过7805、7812稳压给信号发生器和功率放大器供电,,其中的电容器作为滤波电容用,LED作为电源指灯,一来指示+5V电源的存在,而来如果电源接到8051控制板上电源端如果一不小心短路了,马上可以检查出来,免得过久烧毁单片机8051.由于稳压IC上的电压降有4V,在电流负载稍大的使用场合时,IC外壳温度会上升,因此必须外加热片来散热.此外市售的电源调整器的插头输出端的正负极性及转接头的搭配需要特别注意,这是自制稳压电源时要注意的地方自制稳压电源及IQ51单片机的电源调整的插头输出端,正极性在中间,外端金属的部分是负极性,自制时可以三用电表确认一下.稳压管V1电阻R2给直流放大管V3的发射极提供稳压的基准电压。
R3、R4组成分压(取样)电路,从输出电压UL中取出变化的信号电压,使UB3=(R4/R3+R4)UL,并把它加到放大管V3的基极,于是V3的基极和发射极间电压UBE3=UB3-UZ=(R4/R3+R4)UL-UZ。
由于UB3是UL的一部分,故称为取样电压,它和基准电压UZ 比较后的电压差值即UBE3经V3放大后,加到三极管V2的基极上,使V2自动调整管压降UCE2的大小,以保证输出电压稳定。
R1是放大管V3的电极负载电阻,又是调整管V2的基极偏置电阻。
该电路的稳压过程如下:如果输入电压Ui增大,或负载电阻RL增大。
输出电压UL也增大,通过取样电路将这个变化加在V3管的基极上使UB3增大。
由于UZ是一个恒定值,所以UBE3增大。
导致IB3和IC3增大,R1上电压降增大,使调整管基极电压减小,基极电流减小,管压降UCE2增大,从而使输出电压保持不变。
上述稳压过程表示为:Ui↑→UL↑→UB2↑→UBE3↑→IB3↑→IC3↑→ UB2↑→UBE2↑→UCE2↑→UL同理,当输入电压Ui减小或负载电阻RL减小,引起输出电压UL减小时,三极管V3的基极电压减小,V2的基极电压增大,从而基极电压增大,从而使调整管管压降减小。
维持输出电压不变。
由于UBE3=(R4/R3+R4)UL-UZ,而电路中UZ是恒值,UBE3也基本不变,因此在保证一定输入电压Ui条件下,稳压电路的输出电压UL应该满足:UL=R3+R4/R4(UBE3+UZ)此式表明在一定的条件下,UL与取样电阻有关,改变R3、R4数值,可变输出电压数值但UL不可能超过Ui,另外从图1可看出,UL=Ui-(IB2+IC3)R1-UBE2.由于RL减小时,IL 增大,UL降低IC3减小,IB2增大,当IC3为零时IB2最大此时UL=Ui-IB2R1-UBE2.又由于IB2≈IE2/β2≈IL/β2,代入上式则额定输出电流为:IL=β2(Ui-UBE2-UL)/R1二、脉冲信号发生器1.作为实验装置脉宽信号处理我们采用555集成块和外围电路组成,555集成定时器是模拟功能和数字逻辑功能相结合的一种双极型中规模集成器件。
外加电阻、电容可以组成性能稳定而精确的多谐振荡器、单稳电路、施密特触发器等,应用十分广泛。
555定时器的外引线排列图和内部原理框图如图1-1、1-2所示,功能见表1-3。
它是由上、下两个电压比较器、三个5kΩ电阻、一个RS触发器、一个放电三极管 T以及功率输出级组成。
比较器 C1的反相输入端⑤接到由三个5 kΩ电阻组成的分压网络的2/3Vcc处(⑤也称控制电压端),同相输入端⑥为阀值电压输入端。
比较器C2的同相输入端接到分压电阻网络的1/3Vcc处,反相输入端②为触发电压输入端,用来启动电路。
两个比较器的输出端控制RS触发器。
RS触发器设置有复位端D R④,当复位端处干低电平时,输出③为低电平。
控制电压端⑤是比较器C1的基准电压端,通过外接元件或电压源可改变控制端的电压值,即可改变比较器C1、C2的参考电压。
不用时可将它与地之间接一个O.01μF的电容,以防止干扰电压引入。
555的电源电压范围是+4.5~+18V,输出电流可达100~200mA,能直接驱动小型电机、继电器和低阻抗扬声器图 1-1 555集成电路引脚排列图图1-2 时基电路555电路结构图表1-3 555芯片功能表触发 阈值 复位 IS 放电端 输出 H导通LH 原状态H 截止 HL导通L2、谐振荡器的电路图和波形图如图1-4所示。
电源接通后,Vcc 通过电阻R1、R2向电容C 充电。
当电容上电vC=2/3Vcc 时,阀值输入端⑥受到触发,比较器C1翻转,输出电压Vo=0,同时放电管T 导通,电容C 通过R2放电;当电容上电压Vc=1/3Vcc ,比较器C2工作,输出电压Vo 变为高电平。
C 放电终止、又重新开始充电,周而复始,形成振荡。
其振荡周期与充放电的时间有关:CCV 31〉CCV 32〉CCV 31〉CCV 32〈CC V 31〈⨯⨯⨯充电时间:C R R V V V V C R R t CCCC CC CCPH)(7.03132ln )(2121+≈⎪⎪⎪⎪⎭⎫⎝⎛--⋅+=放电时间:C R V V V V C R t CC CCCCCC PL227.03132ln ≈⎪⎪⎪⎪⎭⎫⎝⎛--=振荡周期:T=tPH+tPL≈0.7(R1+2R2)C振荡频率:f=1/T=CR R t t PLPH )2(44.1121+≈+占空系数: 21212R R R R Tt D PH ++==当R2>>R1时,占空系数近似为50%。
图1-4 多谐振荡器的电路图和波形图由上分析可知:a )电路的振荡周期T 、占空系数D ,仅与外接元件R1、R2和C 有关,不受电源电压变化的影响。
b )改变R1、R2,即可改变占空系数,其值可在较大范围内调节。
c ) 改变C 的值,可单独改变周期,而不影响占空系数。
另外,复位端④也可输入1个控制信号。
复位端④为低电平时,电路停振。
三、脉冲计数与显示电路转速检测采用红外发射和接收管,在电动机的转盘上开有一小口,电动机每转一转就接收到一次脉冲信号。
信号经过缓冲、零压比较、反相电路到单片机计数脉冲输入端T1,P0口输出信号经过74HC373地址锁存器构成动态显示电路,显示电动机的转速。
8051基本的硬件设计:1.8051的基本知识:a.8051的引脚40接+5V(VCC)电源,引脚20接电源地线。
b.传统8051工作时钟最高为12MHZ。
c.EA引脚接地,由外部程序ROM来执行程序。
d.EA引脚接高电平或+5V电源,由8051内部程序ROM来执行程序。
e.8031EA引脚必须接低电平,由外部程序ROM来执行程序。
f.89C51 89C52 引脚接高电平后,是由内部程序ROM来执行程序。
g.开机时必须加入芯片重置(RESET)信号。
h.RESET 信号高电平动作,高电平时产生芯片重置。
I.RESET 信号低电平时,则由程序ROM地址0起开始执行程序。
2.几种8051基本的设计框架a.8051标准型设计:使用89C51b.8051扩充型设计:使用89C51外加EPROM,SRAM,I/O组c.8051极小型设计:使用89C20513.8051标准型设计说明8051的程序代码可以外接程序ROM来执行,也可以使用内部4KB的空间(如8751,89C51),当程序长度超过4KB时可以使用89C52(内含8KB),若程序长度超过8KB时可以使用89C55(内含20KB)。
若是采用IO51控制板做设计则程序代码可以长达64KB的空间。
8051EA引脚是接至5V电源,表示由内部程序ROM来提供程序代码,此电路可以使用的单芯片有8751及89C51,而程序的测试方法可以使用ICE,使用89CXX烧录模拟器EPM89或是直接烧录单芯片。
当然直接烧录单芯片,做测试较麻烦还会花费许多时间,如果控制程序简单还可以,要是做课程设计程序就变得复杂了,相当浪费时间,所以手上有ICE的话就相当方便了。
如果想将项目设计得更复杂,使用更多的I/O或是功能扩充,我们建议使用8051外接程序ROM及数据RAM的控制电路,那就是8051扩充型模式设计。