基于stc89c51单片机小车主板主板pcb打印图PDF版
基于89C51单片机小车超声波测距毕业设计打印版

摘要89C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评。
本系统以设计题目的要求为目的,采用89C51单片机为控制核心,利用超声波检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,以及自动停车,并可以自动记录时间、里程和速度,自动寻迹和寻光功能。
整个系统的电路结构简单,可靠性能高。
采用的技术主要有:(1)通过编程来控制小车的速度;(2)传感器的有效应用;(3)新型显示芯片的采用;关键词89C51单片机、光电检测器、PWM调速、电动小车Design and create an intelligence electricity motive small carAbstract89C51 is a 8 bit single chip computer.Its easily useing and multi-function suffer large users. This article introduce the CCUT graduation design with the 89C51 single chip copmuter.This design combines with scientific research object. This system regard the request of the topic, adopting 89C51 for controling core,super sonic sensor for test the hinder.It can run in a high and a low speed or stop automatically.It also can record the time ,distance and the speed or searching light and mark automatically The electric circuit construction of whole system is simple, the function is dependable. Experiment test result satisfy the request, this text emphasizes introduced the hardware system designs and the result analyse.The adoption of technique as:(1)Reduce the speed by program the engine;(2)efficient application of the sensor;(3)The adoption of the new display chip.Keywords89C51 single chip computer、light electricity detector、PWM speed adjusting目录1引言 (1)2系统的总体设计方案 (2)2.1直流调速系统的设计 (2)2.2小车检测系统的设计 (3)2.2.1行车起始、终点及光线检测 (3)2.2.2行车距离检测 (6)图2.4 行车距离检测电路 (6)2.3显示电路 (7)2.4系统原理图 (7)3 硬件设计 (8)3.1单片机89C51硬件结构 (8)3.2最小应用系统设计 (10)3.3前向通道设计 (12)3.3.1传感器的选择 (12)3.3.2单片机测距原理 (12)3.3.3超声波发射电路 (13)3.3.4 超声波检测接收电路 (13)3.3.5超声波测距仪的算法设计 (14)3.4后向通道设计 (14)3.4.1脉宽调制原理: (16)3.4.2逻辑延时环节: (17)3.4.3 电源的设计 (17)3.5显示电路设计 (17)4 软件设计 (19)4.1主程序设计 (20)4.2显示子程序设计 (23)4.3避障子程序设计 (24)4.4软件抗干扰技术 (25)4.4.1数字滤波技术: (25)4.4.2开关量的软件抗干扰技术: (25)4.4.3指令冗余技术: (26)4.4.4软件陷阱技术: (26)4.5“看门狗”技术 (27)4.6可编程逻辑器件 (28)5结论 (29)致谢 (30)参考文献 (31)附录A 程序清单 (32)附录B 硬件原理图 (40)1引言随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。
(word完整版)基于STC89C51单片机的智能超声波避障小车
基于STC89C52单片机的智能超声波避障小车参赛人员:周志强王俊朱纪伟聂孟杰班级:2012级自动化3班日期:2015年3月一、方案概述本小车使用一台 AT89C52 单片机作为主控芯片,它通过超声波测距来获取小车距离障碍物的距离,并且用液晶显示器实时的显示出来,在小车与障碍物的距离小于安全距离(40cm ) 时,小车上蜂鸣器会发出警报声,并且后退并拐弯,同时通过LCD1602显示器显示出小车与障碍物之间的距离,精确到0。
1cm. 在避开障碍物后,小车会沿直线前进。
本系统设计的简易智能小车分为几个模块:单片机控制系统、LCD1602显示器。
超声波路面检测系统、前进、 转弯控制电机以及方向指示灯系统。
它们之间的相互关系如下图所示.智能小车简要原理框架图二﹑总体电路原理图超声波模块三、主要模块基本原理(1)超声波模块超声波时序图以上时序图表明你只需要提供一个10uS以上脉冲触发信号,该模块内部将发出8个40kHz 周期电平并检测回波.一旦检测到回波信号则输出回响信号。
回响信号的脉冲宽度与所测的距离成正比.由此通过发射信号到收到的回响信号时间间隔可以计算得到距离.公式:距离=高电平时间*声速(340M/S)/2.(2)液晶显示模块16 脚接口,其中GND 为电源地,VCC 接5V正电源,VEE ,可调电阻调到最大时对比度最弱,可调电阻调到零时对比度最高令寄存器。
RW ,低电平时进行写操作.当RS 和RW 共同为RS 为低电平RW 为高电平时可以读忙信号,当RS 为高电平RW E 端由低电平跳变成高电平时,液晶屏执行命令。
DB0——DB7 为8 .源程序#include 〈at89x51#include ”#define TX P2_1#define RX P2_0sbit DU = P2^6;sbit WE = P2^7;#是100,100,最大的时候最快#define Forward_R_DATA 180 //例如小车前进的时候有点向左拐,说明右边马达转速过快,那可以取一个值大一点,另外一个值小一点,例如 200 190//直流电机因为制造上的误差,同一个脉宽下也不一定速度一致的,需要自己手动调节//sbit P4_0=0xc0;//P4口地址/*****按照原图接线定义******/sbit L293D_IN1=P1^2;sbit L293D_IN2=P1^3;sbit L293D_IN3=P1^6;sbit L293D_IN4=P1^7;sbit L293D_EN1=P1^4;sbit L293D_EN2=P1^5;sbit BUZZ=P2^3;//蜂鸣器void cmg88()//关数码管,点阵函数{DU=1;P0=0X00;DU=0;}void Delay400Ms(void);//延时400毫秒函数unsigned char code Range[] =”==Range Finder==";//LCD1602显示格式unsigned char code ASCII[13] = "0123456789.-M";unsigned char code table[]=”Distance:000。
自制基于89C51单片机试验板2
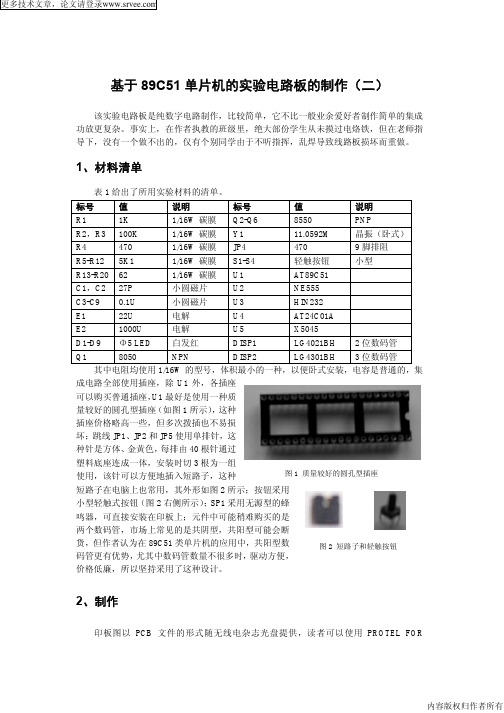
基于89C51单片机的实验电路板的制作(二)该实验电路板是纯数字电路制作,比较简单,它不比一般业余爱好者制作简单的集成功放更复杂。
事实上,在作者执教的班级里,绝大部份学生从未摸过电烙铁,但在老师指导下,没有一个做不出的,仅有个别同学由于不听指挥,乱焊导致线路板损坏而重做。
1、材料清单表1给出了所用实验材料的清单。
其中电阻均使用1/16W 的型号,体积最小的一种,以便卧式安装,电容是普通的,集成电路全部使用插座,除U1外,各插座可以购买普通插座,U1最好是使用一种质量较好的圆孔型插座(如图1所示),这种插座价格略高一些,但多次拨插也不易损坏;跳线JP1、JP2和JP5使用单排针,这种针是方体、金黄色,每排由40根针通过塑料底座连成一体,安装时切3根为一组使用,该针可以方便地插入短路子,这种短路子在电脑上也常用,其外形如图2所示;按钮采用小型轻触式按钮(图2右侧所示);SP1采用无源型的蜂鸣器,可直接安装在印板上;元件中可能稍难购买的是两个数码管,市场上常见的是共阴型,共阳型可能会断货,但作者认为在89C51类单片机的应用中,共阳型数码管更有优势,尤其中数码管数量不很多时,驱动方便,价格低廉,所以坚持采用了这种设计。
标号值说明标号值 说明 R1 1K 1/16W 碳膜 Q2-Q6 8550 PNP R2,R3 100K 1/16W 碳膜 Y1 11.0592M 晶振(卧式)R4 470 1/16W 碳膜 JP4470 9脚排阻 R5-R12 5K1 1/16W 碳膜 S1-S4 轻触按钮 小型 R13-R20 62 1/16W 碳膜 U1 AT89C51 C1,C2 27P 小圆磁片 U2 NE555C3-C9 0.1U小圆磁片 U3HIN232E1 22U 电解 U4 AT24C01A E2 1000U 电解 U5 X5045 D1-D9Φ5 LED白发红 DISP1 LG4021BH 2位数码管Q1 8050 NPNDISP2 LG4301BH 3位数码管图1 质量较好的圆孔型插座 图2 短路子和轻触按钮2、制作印板图以PCB 文件的形式随无线电杂志光盘提供,读者可以使用PROTEL FORWINDOWS软件打开该文件,并用打印机打印出来,打印出来以后,可以根据自己的条件自行制作单面印板,建议同时打印一份顶层丝印层(Top Overlay layer)图,这样在安装时可以比较方便。
基于STC89C51单片机的智能避障小车
西华大学“西华杯”学生课外学术科技作品
项目申报书
项目名称:基于STC89C51单片机的智能避障小车学院名称:电气信息学院
申报者姓名
(集体名称):
指导老师:
类别:
□自然科学类
□哲学社会科学类
□科技发明制作类
1.本项目申报书,在申报项目批准后,方为有效。
2.本项目申报书填写一式一份,报校团委。
3.本项目申报书各项内容,要实事求是,逐条认真填写。
表达要明
确、严谨。
4.本项目申报书要求用A4纸打印,双面复印(项目组成员签
名由本人亲笔填写)装订成册;填写、装订不符合要求者,申报项目不予受理。
5.项目原则上在一年内完成。
6.项目完成时,按照本项目申报书第二栏填写的成果形式结题
(验收、鉴定),请各学院(直属系)严格审定。
7.如有未尽事宜,可另附材料说明。
第2章89C51单片机硬件结构和原理李朝青--单片机原理及接口技术北京航空航天大学出版社(第3版)课件 共163页P

23.09.2
返回 单片机原理及接口技术
§2.1.2 89C51单片机芯片内部结构
一、结构图 二、结构组成
23.09.2
返回 单片机原理及接口技术
一、结构图
• 由 中央处理单元(CPU)、存储器 (ROM及RAM)和I/O接口组成。
• 89C51单片机内部结构如 图2-2所示。
23.09.2
3、I/O接口
89C51有四个8位并行I/O接口P0~P3。 它们都是双向端口,每个端口各有8
条I/O线。 P0-P3口四个锁存器同RAM统一编址,
可作为SFR来寻址。
23.09.2
返回 单片机原理及接口技术
2.2 89C51单片机引脚及其功能
§2.2.1 89C51单片机引脚 §2.2.2 89C51单片机引脚功能
89C51RAM均为128B,地址为00H~7FH。
用于存放运算的中间结果、数据暂存以及数据缓 冲等。
这128B的RAM中有32个字节单元可指定为工作寄 存器。
片内还有21个特殊功能寄存器(SFR),它们同 128字节RAM统一编址,地址为80H~FFH。后面详 细介绍。
23.09.2
返回 单片机原理及接口技术
23.09.2
单片机原理及接口技术
三、控制信号引脚:
RST、ALE、PSEN和EA
• ALE/PROG(30脚):
ALE:地址锁存允许信号端。正常工作时,
该引脚以振荡频率的1/6固定输出正脉冲。 CPU访问片外存储器时,该引脚输出信号作 为锁存低8位地址的控制信号。它的负载能 力为8个LS型TTL负载。
内中断 外中断
64KB 总线 扩展控制器
控制
可编程I/O 并行口
基于STC89C51单片机的多功能智能小车设计

W a ng R ui qi ( Xi ’ a n Ae r o na ut i c a l Un i ve r s i t y,Xi a n 7 1 00 77,Chi na )
Ab s t r a c t :Th i s p a p e r p r e s e n t s t he d e s i g n o f a s ma r t c a r b a s e d o n STC8 9 C5 1 M CU ,whi c h c a n a v o i d o b s t r u c t i o n,t r a c k a n d b e r e mo t e l y c o n t r o l l e d . Th e p h o t o e l e c t r i c s wi t c h c a n d e t e c t b a r r i e r s ,a n d c a r r y o u t i t b y d r i v i n g t h e mo t o r s t e e r i n g .
2 硬 件 设 计 及 电 路
设计 的智 能小 车 由 S T C 8 9 C5 1控制 部 分 、 避 障部 分 、
循迹 部分 、 电源部 分 、 驱动 部分和显 示部 分组 成 , 系 统 框 图
如图 1 所示。
有 一定 的军 用价值 , 能代 替 人类 去 “ 危 险 地 带” 或“ 不 可 接 触 的地方 ” 执行任 务 。前 人研 究设 计的 智能 小 车有 避 障小
Ke y wo r d s :S TC8 9 C5 1;s ma r t c a r ;i n f r a r e d s e n s o r
1 引 言
智 能小 车是一 个集传 感探 测技术 、 智 能 控 制 技 术 和 电 机 拖动 技术 为一体 的机 器人 , 是 目前 电 子 设 计 的 一 个 热 门 话 题 ] 。智能小 车可 用于 探测 、 搜 救和 科研 等领 域 , 甚 至
基于STC89C51单片机智能化小车控制

专业整理基于 STC89C51 单片机智能小车控制项目名称:基于单片机 STC89C51 智能小车控制 小组成员:xx 班级:xx 指导教师:xx 开发结束时间:2011 年 7 月 10 日 星期日WORD 完美格式专业整理目录 1.1 项目概述................................................................. 3 1.2 项目要求................................................................. 3 1.3 系统设计................................................................. 31.3.1 框图设计 ........................................................... 3 1.3.2 知识点 ............................................................. 4 1.4 硬件设计................................................................. 4 1.4.1 电路原理图 ......................................................... 4 1.4.2 原件清单........................................................... 6 1.4.3 L293D 驱动单片机的原理简介 ......................................... 7 1.4.4 STC89C51 单片机管脚图及其功能 ...................................... 7 1.5 软件设计................................................................. 9 1.5.1 程序流程图......................................................... 9 1.5.2 L293D 驱动器管脚赋值表 ............................................ 10 1.5.3 程序清单.......................................................... 10 1.6 软件仿真及硬件调试...................................................... 21 1.6.2 硬件调试.......................................................... 21 1.6.1 软件仿真.......................................................... 22 1.7 总结.................................................................... 23 1.8 文献参考................................................................ 23WORD 完美格式专业整理1.1 项目概述随着单片机技术的不断发展和完善已经大量的运用在工业的控制、数据的采集、智能化 仪表、机电一体化、家用电器等领域,极大地提高了这些领域的技术水平和自动化控制水平。
(完整版)STC89C51芯片资料
3.1.1STC89C51芯片及最小系统介绍:STC89C51是一种低功耗、高性能CMOS 8位微控制器,具有4K 在系统可编程Flash 存储器。
使用Atmel 公司高密度非易失性存储器技术制造,与工业80C51 产品指令和引脚完全兼容。
片上Flash允许程序存储器在系统可编程,亦适于常规编程器。
在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使得STC89C51在众多嵌入式控制应用系统中得到广泛应用。
2.3.1.1主要功能列举1、拥有灵巧的8位CPU和在系统可编程Flash2、晶片内部具时钟振荡器(传统最高工作频率可至 12MHz)3、内部程序存储器(ROM)为 4KB4、内部数据存储器(RAM)为 256字节5、32 个可编程I/O 口线6、8 个中断向量源7、两个 16 位定时器/计数器8、三级加密程序存储器9、全双工UART串行通道10、低功耗空闲和掉电模式;11、掉电后中断可唤醒;12、看门狗定时器;13、双数据指针;14、掉电标识符。
2.3.1.2 各引脚功能VCC:STC89C51电源正端输入,接+5V。
GND:电源地端。
XTAL1: 单芯片系统时钟的反相放大器输入端。
XTAL2:系统时钟的反相放大器输出端,一般在设计上只要在 XTAL1 和XTAL2 上接上一只石英振荡晶体系统就可以动作了,此外可以在两引脚与地之间加入一 20PF 的小电容,可以使系统更稳定,避免噪声干扰而死机。
RESET:STC89C51的重置引脚,高电平动作,当要对晶片重置时,只要对此引脚电平提升至高电平并保持两个机器周期以上的时间,AT89S51便能完成系统重置的各项动作,使得内部特殊功能寄存器之内容均被设成已知状态,并且至地址0000H处开始读入程序代码而执行程序。
EA/Vpp:"EA"为英文"External Access"的缩写,表示存取外部程序代码之意,低电平动作,也就是说当此引脚接低电平后,系统会取用外部的程序代码(存于外部EPROM中)来执行程序。