液压支架同步升降系统设计
液压支架液压系统设计

液压支架液压系统设计1. 引言液压支架是一种常见的起重设备,采用液压系统作为动力来源,实现起重、下降和平衡等功能。
本文将介绍液压支架液压系统的设计。
2. 液压系统的工作原理液压支架液压系统由液压油箱、液压泵、液压缸、液压阀和控制系统等组成。
其工作原理如下:1.液压油箱:储存液压油,并通过滤油器保证液压油的清洁。
2.液压泵:将液压油从油箱中抽取出来,并提供所需的压力。
3.液压缸:接受由液压泵提供的液压力,产生线性位移或力。
4.液压阀:通过控制液压油的流通,实现液压系统的各种功能。
5.控制系统:根据需要,控制液压阀的开关,从而控制液压缸的运动。
3. 液压系统的设计要点在设计液压支架液压系统时,需要考虑以下几个要点:3.1. 压力需求液压系统根据使用场景的需要,确定所需的最大工作压力。
根据工作压力来选择液压泵和液压缸的类型和规格。
3.2. 流量需求根据液压系统所需的最大流量来确定液压泵的流量大小。
同时,也需要考虑液压管路的直径和长度,以保证流量传输的顺畅。
3.3. 控制方式液压支架液压系统可以采用手动控制或自动控制方式。
手动控制需要人工操作控制阀,而自动控制可以通过传感器和控制器实现。
3.4. 安全考虑在设计液压系统时,需要考虑安全因素,例如应采用双重液压回路设计,避免单点故障导致系统失效;选择具有过载保护功能的液压阀,以保护系统和操作人员的安全。
4. 液压系统的组成部分液压支架液压系统由以下几个组成部分构成:4.1. 液压油箱液压油箱用于储存液压油,具有适当的容量和良好的密封性能。
油箱上还需设置油面高度计和油温计等监测装置,方便操作人员了解液压系统的工作状态。
4.2. 液压泵液压泵负责将液压油从油箱中抽取出来,并提供所需的压力。
常见的液压泵有齿轮泵、叶片泵和柱塞泵等,选择时需考虑流量、压力和效率等因素。
4.3. 液压缸液压缸接受液压泵提供的液压力,产生线性位移或力。
液压缸的规格取决于所需的工作压力、位移和力大小。
液压支架系统设计说明书

本论文要紧论述了一样掩护式液压支架的设计进程。
设计内容包括:选架型、整体设计、要紧零部件的设计、要紧零部件的校核和液压系统的设计。
支架采纳正四连杆机构,以改善支架受力状况。
顶梁、掩护梁均做成箱体结构;立柱采纳双伸缩作用液压缸,以增加工作行程来知足支架调高范围的需要。
推移千斤顶采纳框架结构,以减少推溜力和增大移架力。
为了提高移架速度,确保对顶板的及时支护,采纳锥阀液压系统。
The article mainly elaborated the general shield type hydraulic pressure support design process. The design content includes: Chooses, the system design, the main spare part design, the main spare part examination and the hydraulic system design.The support uses the four link motion gear, improves the support stress condition. The top-beam, caving shield, the foundation makes the packed in a box body structure; The column uses the double expansion and contraction function hydraulic cylinder, increases the power stroke to satisfy the support to adjust the high scope the need. Passes the hoisting jack to use the portal frame construction, reduces pushes slides the strength and increases moves a strength. In order to enhance moves a speed, guarantees is prompt to the roof support, uses the mushroom valve hydraulic system.目录1概述 (4)液压支架的组成和分类 (4)液压支架的工作原理 (7)支架选型的大体参数 (8)2整体设计 (10)液压支架大体参数的确信 (10)四连杆机构设计 (12)立柱及柱窝位置的确信 (14)平稳千斤顶位置的确信 (33)其它千斤顶位置的确信 (36)3支架的受力计算 (39)液压支架受力分析 (39)确信支架的支护强度 (40)底座接触比压计算 (40)支架支护效率 (40)4液压支架的要紧部件的设计 (42)前梁 (43)主顶梁 (43)掩护梁 (44)前、后连杆 (45)底座 (45)立柱 (46)千斤顶 (47)5要紧零、部件的强度校核 (49)校核的大体要求 (49)前梁的校核 (50)主顶梁的校核 (52)掩护梁的强度校核 (55)底座强度校核 (57)销轴和耳座的强度校核 (59)立柱强度校核 (62)6液压系统设计 (68)液压支架的液压系统的简介 (68)液压支架的液压系统拟订 (69)液压元件的选取 (71)液压操纵系统 (72)终止语 (76)参考文献 (77)1 概述液压支架的组成和分类、液压支架的组成液压支架的种类很多,但其大体功能是相同的。
液压支架试验加载台移动梁升降液压缸同步控制系统
时控制等方 面的教学 和科研工作 , 致力于各 行业液压试 验设 备
的开 发 和研 究 。
3 结 论
首先 , 应 提 高转 子端 面 与配 流 盘 这 对 主要 摩 擦 副 之 间 的平面度 要 求 , 使 摩 擦更 加 均 匀 ; 其次 , 可在 配 流 盘 卸荷 槽 的尖部 增设 一 个 泄 油 和 消音用 的卸 荷 孔 , 再 适 当加大 卸荷 槽 的长度 , 以缓 冲油 液 的压力 冲击 , 改善
根据被试液压支架参数设计的加载台参数如下 :
加 载 台有效 加 载空 间 ( 长 ×宽 ×高 )= 5 5 0 0 mm×
2 6 0 0 mm ×7 5 0 0 mm :
加 载 台移 动梁 重量 : 6 0 t 。
升降油缸 : ① 最大工作压力 : 2 0 M P a ; ② 工作形式 : 双伸缩 ;
2 0 1 3年第 1 2期
液压与 气动
1 技 术参 数
1 2 1
形式如图 1 所示 。主要 由四立柱 、 移 动梁 、 升降油缸 、 插拔销及插拔油缸等组成。根据被试液压支架的试验 高度 , 采用 4个升降油缸 同步运动实现移动梁上下移
动, 调整 加载 台移 动梁 与底 座 之间 的距 离 。
明, 此控制 系统工作稳定可靠 , 终点控制精度可达 1 m m。
关 键词 : 液 压 支架 ; 加载台; 液 压 系统 ; 同步控 制
中图分类 号 : T H1 3 7; T P 2 7 1 . 3 1 ; T K 4 4 1 . 3 1 文献标 志 码 : B 文章编 号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 3 ) 1 2 - 0 1 2 0 - 0 4
双曲柄连杆同步升降平台液压系统设计-甘肃科技
㊀㊀升降平台的工作方式为垂直运动, 根据力学原 理采用双曲柄连杆同步机构, 有利于节省能源, 减少 振动, 增加运动的稳定性。液压系统采用主油路和 控制油路相结合, 在控制方式上能够进一步提高升 降平台的工作性能, 以达到预期的效果。根据升降 台负载情况计算得到了液压系统的工作参数及工作 状况, 设计了液压传动的方案, 确定了液压系统原理
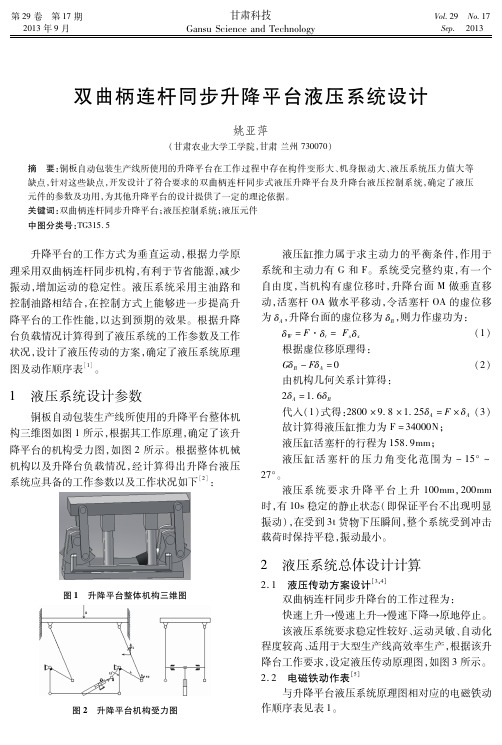
根据整体机械机构以及升降台负载情况经计算得出升降台液压系统应具备的工作参数以及工作状况如下液压缸推力属于求主动力的平衡条件作用于系统和主动力有系统受完整约束有一个自由度当机构有虚位移时升降台面做垂直移动活塞杆oa做水平移动令活塞杆oa的虚位移故计算得液压缸推力为f34000n
第2 9卷㊀第 1 7期 2 0 1 3. 3 ㊀液压元件参数和功用 [ 升降台液压原理图中各元件的参数及功用如下
所述: 1 ) 滤油器( 1 ) : 排除杂物, 保持液压油清洁; 2 ) 液压泵( 2 ) : 采用 Y B 1- 6单级叶片泵, 额定 压力 P= 6 . 3 M P a , 额定流量 Q= 6 L / m i n , 叶片泵转动 平稳, 输出流量均匀, 压力脉动小, 广泛用于中压系 统, 为液压系统提供压力油, 所以, 被称为液压系统 的动力元件; 3 ) 电动机( 3 ) : 采用 0 . 7 5 k W、 n= 9 6 0 r / m i n ( 三 相异步电动机) ; 4 ) 主溢流阀( 4 ) : 作背压阀, 保证液压系统稳定 性; 5 ) 电磁换向阀( 5 ) : 采用 3 4 D Y- 2 5 B Z三位四 通电磁换向阀, 适时改变液压油流动方向, 为液压系 统中的控制元件; 6 ) 调速阀( 6 ) 、 ( 7 ) : 改变升降台上升速度; 7 ) 二位二通换向阀( 8 ) 、 二位三通换向阀( 9 ) : 速度切换, 实现差动连接; 8 ) 外泄式液控单向阀( 1 0 ) : 起锁紧作用, 防止 升降台晃动; 9 ) 液压缸( 1 1 ) : 活塞直径 D= 9 0 m m , 活塞杆直 径d = 6 0 m m ; 活塞行程 s = 1 6 0 m m , 缸体壁厚为 δ = 5 m m , 作为液压传动的执行元件, 将液压能转变为机
液压升降设备刚性同步机构的一种创新设计
B i igo timetSa im l fEt n tdu u n d ne an r
压升降设备 刚性同 机构的一神创新设计
● ● ■ ,
【 摘
要 】 针 对 双 片剪 叉 式 液 压 升 降 设备 左 右 两 片 台不 同 步 的 问题 ,运 用 系统探 求 创 新 法 分析 了现 有各 种 同 步技 术 的利
力变 化而 引起流 量变化 的原理来 调节 流量变 化的 ,而动态
特 性列举 法是技 术创新活 动中 常用的 有效 系统探求 方 频繁的系统速度调节误差较大 ;
C 分流 一集流 阀要求其 阀芯水 平安装 ,由于 安装条件 .
部分 :名词性 、形容 词性 及动词性 等特征 ;编 制其本质 特 及安 装精度 较差 ,加之机 械阻尼 的差 别等 因素 ,也影 响到 征表 并分析所 有特征 ;在分 析的基 础上用 取代 、替换 、简 其分流精度。 化 、组合 等方 法加 以改进 。
较 其误 差 ,尔 后指令 控制 电液 比例流量 阀调节 各自流量 , 达到 调节活塞 同步运 动的 目的。此方案 能 比较 准确地控 制 设备 同步运行 ,但当油 缸内置 传感器后 ,造成缸 体结构加 而 受力 。因此 ,都有其局限性 。
2 刚性 同步 机构的 创新 没 计
为 了使 双片剪叉 式液压 升降台左右 片台简单 可靠地 同
[ e rs ss m sac ig d u l f ts g ;y c rn u c; eoma o ; E K yWod] yt erhn ; obe a ae snho o sak dfr t n F M e st l r i
剪 叉 式 升 降 台 具 有 设 备 自 高 低 、 升 降 行 程 放 大 作 用 突
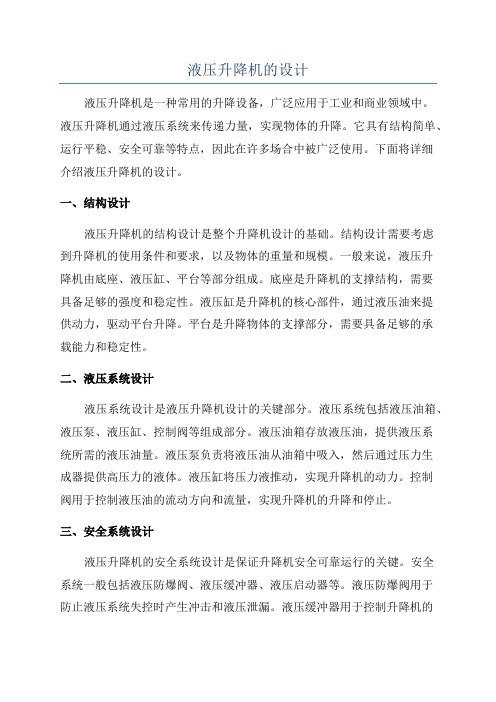
液压升降机的设计
液压升降机的设计液压升降机是一种常用的升降设备,广泛应用于工业和商业领域中。
液压升降机通过液压系统来传递力量,实现物体的升降。
它具有结构简单、运行平稳、安全可靠等特点,因此在许多场合中被广泛使用。
下面将详细介绍液压升降机的设计。
一、结构设计液压升降机的结构设计是整个升降机设计的基础。
结构设计需要考虑到升降机的使用条件和要求,以及物体的重量和规模。
一般来说,液压升降机由底座、液压缸、平台等部分组成。
底座是升降机的支撑结构,需要具备足够的强度和稳定性。
液压缸是升降机的核心部件,通过液压油来提供动力,驱动平台升降。
平台是升降物体的支撑部分,需要具备足够的承载能力和稳定性。
二、液压系统设计液压系统设计是液压升降机设计的关键部分。
液压系统包括液压油箱、液压泵、液压缸、控制阀等组成部分。
液压油箱存放液压油,提供液压系统所需的液压油量。
液压泵负责将液压油从油箱中吸入,然后通过压力生成器提供高压力的液体。
液压缸将压力液推动,实现升降机的动力。
控制阀用于控制液压油的流动方向和流量,实现升降机的升降和停止。
三、安全系统设计液压升降机的安全系统设计是保证升降机安全可靠运行的关键。
安全系统一般包括液压防爆阀、液压缓冲器、液压启动器等。
液压防爆阀用于防止液压系统失控时产生冲击和液压泄漏。
液压缓冲器用于控制升降机的运行速度,防止运行过程中产生冲击力。
液压启动器用于控制液压油的流动,实现升降机的启动和停止。
四、电气系统设计液压升降机的电气系统设计是液压升降机设计中的一部分。
电气系统一般包括电机、电源、电控柜等组成部分。
电机用于提供动力,驱动液压泵和液压油泵。
电源用于提供电能,保证电气系统正常工作。
电控柜用于控制电气系统的运行,实现升降机的控制和调试。
总之,液压升降机的设计是一个复杂的过程,需要考虑到结构、液压系统、安全系统和电气系统等多个方面。
在设计过程中,需要根据实际情况和需求,选择适当的结构和技术方案,以确保液压升降机的安全可靠运行。
汽车维修液压升降同步平台系统设计-答辩PPT
液压平台的控制部分设计
控制部分主要采用西门子PLC200 采用扩展模块EM235(四模拟量输入、 一模拟量输出) 采用扩展模块EM232(两模拟量输出)
控制系统
软件设计
控制主要采用PID控制 通过检测设定缸的位移,检测追踪缸的 位移,通过比较,然后进行PID运算将信 号输出控制比例阀 PID的梯形图编程主要采用PID向导编制, 具体梯形图在说明书上有详细的讲解
汽车维修液压升降同步平台系统 设计
选题背景
随着轿车使用的普遍,汽车维修行业的不断扩 大,对汽车维修的效率要求越来越高 为减轻维修人员的工作强度,需要维修设备的 自动化程度不断改善 为满足汽车维修所需的功能,要求液压平台可 以实现两前、两后、两左、两右以及四轮的分 别同步升降控制
设计的总体方案
液压系统原理图来自下边为液压系统的原理图和工作原理
液压系统设计的优点
在液压系统原理图的设计中,采用蓄能器依靠重力的 驱动驱使平台下降,可以节省电机的频繁启停,节约 能源。 可以满足汽车维修所要求的两前轮、两左轮、两后轮、 两右轮以及四轮同时上升的同步功能。 保证同步精度,系统响应快速稳定。 通过液控单向阀可以随时实现自锁功能。
总结
以上是对液压升降平台的机械结构、液 压系统结构和控制系统设计的简单讲解 通过毕业设计过程使我进一步了解了设 计过程和设计方法。
该设计主要是对液压同步平台的的机械结构、液压系 统以及控制部分的设计。 实现同步设计主要采用的是液压系统,通过对液压缸 的位移检测,比较两两缸位移的差值,然后通过PLC的 PID计算消除差值,将控制信号输出给电液比例方向阀, 控制比例阀的开口大小来调节,以实现电液比例位置 控制系统,来保证同步精度。 机械结构采用的是四个液压缸进行主要的升降功能。
液压支架同步升降系统设计

置信 号 , 指令 输 入 信 号 进行 比较 运 算 , 与 发 出 比 例 伺 服 换 向 阀 的 控 制 信 号 。 制 器 由 控
PC机 、 A/D及 D/A转 换 构 成 ; 体 控 制 编 程 具 实现 。
2 同步升 降控制 系统构 成及建模
电液 伺 服 升 降 同步 控 制 系 统 由四 个 同
步 子 系 统 构 成 , 个 动 力机 构 的 组 成 和 主 四 要液 压 、 器元 器 件 基 本 参 数 如 下 。 电 () 1比例 伺服 阀 : 四个 系统均采 用BOS CH 公 司NG 非 线 性 ( 0 比例 伺 服 阀 。 本 参 6 6 %) 基 数如 下 : 定 供 油 压 力 : 1 额 2 MPa; 定 流 量 : 额 2 1 mi 额 定 工 作 电流 : l mA{ 宽 : 4 / n; 士 0 频 5 HZ 响应 时 间(0 %)<l ms O ; 10 : 0 。 ( ) 例溢 流 阀BOSCH公司 NG6 2比 比例 溢 流阀 , 公称压 力为3 .MP ; 1 5 a 响应时 间(0 %) 10 :
工 业 技 术
SI0 C NE&TCNLG E EHO0Y.
匪圜
液 压 支 架 同步 升 降 系学 院 机 电 工 程 学 院 西 安 陕
7 3 1 00) 0
摘 要 : 文分析 了液 压 同步系统 的研 究现 状及 存在 的问题 , 本 并据此设 计 出运 用 电液比 例伺服 阀实现 四缸 同步的液 压控 制系统 , 立 了升 建 降 同 步控 制 系统 的 解 析 模 型 , 分 析 模 型 时 作 了一 些 假 设 , 忽略 了某 些 参 数 的 影 响 , 而从 分 析 简化 的 数 学 模 型 得 出 了优 化 系统 静 , 在 并 进 动 态 特 性 的 条 件 。 对 建 模 结 果 存 在 的 同 步 误 差 , 析 了误 差 产 生 的 原 因 , 出 了减 小 误 差 的 方 法 。 针 分 提 关 键 词 : 步控 制 电液 伺服 机 构 同 PD控 制 I 中图 分 类 号 : H1 7 T 3 文献标识码 : A 文 章编 号 : 6 2 3 9 ( 0 10 ( ) O 1 —0 1 7 - 7 1 2 1 ) 7b- 1 1 2 防 随 着 液 压 技 术 在 工 程 领 域 中 的 广 泛 采 要 求 在 升 降 过 程 中 速 度 平 稳 一 致 , 止 梁 一 用 , 同 液 压 机 构 之 间 的 同 步 问 题 日益 得 体 扭 曲 变 形 。 般 多 点 同 步 升 降 电 液 伺 服 不 阀 阀 到 重 视 。 于 每 一 套 液 压机 构 负 载 存 在 差 系 统 具 有 两 种 形 式 : 控 和 泵 控 方 式 。 控 由 压 异 、 件 性 能 不 同 以及 制 造 误 差 , 耗 等 使 式 由 集 中 泵 站 提 供 动 力 源 , 力 油 通 过 控 元 损 系 得 多 执 行 机 构 在 同 步 运 动 中 会 产 生 误 差 。 制 阀 组 的 分 配 进 入 液 压 缸 , 统 通 过 各 路 电 液 伺 服 系 统 是 一 种 由 电信 号 处 理 装 置 和 阀 件 通 断控 制 流 量 , 而 实 现 同 步 ; 控 式 从 泵 液 压 动 力 机 构 组 成 的 反馈 控 制 系 统 , 过 的 动 力 源 为 分 散 形 式 , 个 缸 体 由独 立 油 通 每 油 通 使 用 电液 伺 服 阀 , 小 功 率 的 电 信 号 转 换 泵 驱 动 , 泵 为 变 频 调 速 电机 驱 动 , 过 调 将 为 大 功 率 的 液 压 动 力 , 而 可 实 现 一 些 重 从 型 大 功 率 机 械 设 备 的 伺 服 控 制 , 有 结 构 具
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液压支架同步升降系统设计
摘要:本文分析了液压同步系统的研究现状及存在的问题,并据此设计出运用电液比例伺服阀实现四缸同步的液压控制系统,建立了升降同步控制系统的解析模型,在分析模型时作了一些假设,并忽略了某些参数的影响,进而从分析简化的数学模型得出了优化系统静,动态特性的条件。
针对建模结果存在的同步误差,分析了误差产生的原因,提出了减小误差的方法。
关键词:同步控制电液伺服机构PID控制
0 引言
随着液压技术在工程领域中的广泛采用,不同液压机构之间的同步问题日益得到重视。
由于每一套液压机构负载存在差异、元件性能不同以及制造误差,损耗等使得多执行机构在同步运动中会产生误差。
电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统,通过使用电液伺服阀,将小功率的电信号转换为大功率的液压动力,从而可实现一些重型大功率机械设备的伺服控制,具有结构简单、控制精度高、易于实现自动控制等特点。
本文以阀控非对称缸形式的电液伺服机构为研究对象,采用计算机控制技术,在提高控制精度的同时,降低同步误差。
1同步升降系统简介
液压支架同步升降系统为周边四位结构,四个液压缸处于四个支点处。
整个系统要求在升降过程中速度平稳一致,防止梁体扭曲变形。
一般多点同步升降电液伺服系统具有两种形式:阀控和泵控方式。
阀控式由集中泵站提供动力源,压力油通过控制阀组的分配进入液压缸,系统通过各路阀件通断控制流量,从而实现同步;泵控式的动力源为分散形式,每个缸体由独立油泵驱动,油泵为变频调速电机驱动,通过调节油泵电机转速来调节各路流量,实现同步控制。
本系统采用高精度比例换向伺服阀控制液压缸实现高精度同步效果,整个升降系统由控制部分和液压升降装置构成。
液压升降装置由液压缸、液压泵站、三位四通比例换向伺服阀、平衡阀及连接管构成,单点升降装置液压系统如图1所示。
系统工作时要求四个液压缸位置同步、速度同步,这将由控制器发出的信号控制实现,控制器接收位置传感器发回的位置信号,与指令输入信号进行比较运算,发出比例伺服换向阀的控制信号。
控制器由PC机、A/D及D/A转换构成;具体控制编程实现。
2同步升降控制系统构成及建模
电液伺服升降同步控制系统由四个同步子系统构成,四个动力机构的组成和主要液压、电器元器件基本参数如下:
(1)比例伺服阀:四个系统均采用BOSCH公司NG6非线性(60%)比例伺服阀。
基本参数如下:额定供油压力:21Mpa;额定流量:24L/min;额定工作电流:士10mA;频宽:50Hz;响应时间(100%):<10ms
(2)比例溢流阀BOSCH公司NG6比例溢流阀,公称压力为31.5MPa;响应时间(100%):<30ms
(3)四个动力机构共用一个液压泵,泵的额定压力:12MPa;额定流量:50L/min。
(4)非对称液压缸基本参数:缸径:140mm;杆径:100mm;行程:3000mm;工作压力:12MPa
(5)位移传感器:四套同步子系统使用相同的MRU磁致伸缩传感器。
工作电源:士12V,分辨率:优于0.002%FS;精度:士0.lmm;额定信号输出:0-5V(两液压缸活塞杆缩到底,即0mm处,位置传感器输出0V)
该同步升降控制系统由四路相同的阀控缸液压缸回路组成,系统建模时以一路为研究对象再综合分析。
非接触式磁致伸缩位移传感器用来检测液压缸的活塞运动位移量,以构成液压缸的活塞位置控制闭环。
控制器的输出指令经过D/A转换卡,向比例伺服阀放大器输入控制电压,经放大器给比例电磁铁提供电流,若忽略衔铁运动速度对电流动态过程的影响(表现为运动反电动势),则其传递函数由下式表
示:
根据阀控液压缸的三个基本方程推导得出阀控液压缸同步控制系统的误差传递函数数学模型。
传递函数中流量增益K;的值会随着比例伺服阀的阀口压差的变化而变化,公式中的部分参数值也会随着液压系统油温、压力等参数的变化而变化。
因此系统控制策略的研究和选择,对于获得良好的控制性能显得尤为重要。
3阀控液压缸式位置系统中PID控制器研究
3.1PID控制概述
PID控制是比例积分微分控制的简称。
PID控制是在工业过程中历史最久、生命应用最广泛的基本控制算法。
PID控制的优点是原理简单,使用方便,鲁棒性较强。
也就是说,其控制品质对特性变化灵敏度比较低,调节器参数调整比较容易;具有无余差能力,精度较高;可用于各类工业过程控制,并已商品化。
计算机过程控制的基本算法也仍然是PID控制,据估计工业控制中PID应用占90%以上。
3.2控制算法在计算机中的实现
3.2.1信号输入
采用计算机(包括微型计算机)来实现离散PID控制时,一台计算机往往要控制多个回路。
输入信号须经过多路开关采样,送往放大器及A/D转换器,然后由CPU进行运算。
输入信号必须经过模拟和数字滤波。
计算机控制多个控制回路必须按顺序进行。
不同物理量的采样时间可以不同。
对于每一个控制回路,每巡回一次完成输入采样、PID运算和输出三个步骤。
输入信号除模拟量外,还有开关量和脉冲量,他们不需要A/D转换。
3.2.2信一号的量化
在计算机中是用二进制代码进行运算的,因此,输入的测量值和设定值都必须经量化变为数字量。
3.2.3信号的非线性化处理
有许多变送器输出的标准信号与被控量之间关系不是线性的,为使它们的关系线性化,需对代表流量的差压变送器输出进行开方;对流量进行温度、压力补偿;对代表温度的热电偶输出的电势进行分段线性化,可采用下式计算
3.2.4 输出
信号非线性处理后经过圆整误差、抑制噪声后进行输出。
计算机输出有模拟量、脉冲量和开关量三种。
数字计算机运算结果经过D/A 转换后就是模拟输出,它经电器转换后可操纵调解阀。
在采样间隔必须采用保持器进行保持。
脉冲量输出可以直接驱动步进电机,这时采样算法应采用增量型。
步进电机带动电位器,转换成电流信号,再经电器转换来操纵调解阀。
开关量输出用来控制阀门的开闭或电动机的启停,常用于连锁保护或程序(顺序)控制。
4 结论
系统分成两步进行了测试。
在工控机进行同步控制系统控制软件和电模拟试验。
其主要准备工作是采购位移传感器、工控机、PCI接口板卡、高精度的伺服电源等。
主要是调试控制软件的运行质量,验证其可行性,同事对各传感器进行测试,试验其位移反馈信号能否与工控机的容量和运算速度相互匹配。
是否能够满足整个同步控制系统的精度要求。
然后对液压支架试验台的液压系统进行调试,确保PLC 能够正确读入和输出控制信号,逻辑程序准备无误的情况下,在一定的时间间隔下测得四个液压缸的实际位置数值,通过对数据的处理,验证所选控制策略的控制效果良好。
参考文献
[1] 刘金馄等. 先进PID控制及其MATLAB仿真,北京:电子工业出版社,2003
[2]刘春芳,吴伟. 双电液伺服系统同步模糊控制研究[M].北京:机械工业出版社. .2005
[3]王积伟、陆一心、吴振顺. 现代控制理论与工程[M]. 北京:高等教育出版社2003
[4] 路角祥. 液压气动技术手册[M].北京:机械工业出版社.2002
[5] 吴根茂、邱敏秀、王庆丰. 新编实用电液比例技术[M].杭州:浙江大学出版社. 2006。