最小机器重量问题
(完整word版)最小重量机器设计问题

最小重量机器设计问题1。
问题描述设某一机器由n个部件组成,每一个部件都可以从m个不同的供应商处购得。
设wij是从供应商j处购得的部件i的重量,cij是相应的价格。
试设计一个算法,给出总价格不超过c的最小重量机器设计.算法设计:对于给定的机器部件重量和机器部件价格,计算总价格不超过d的最小重量机器设计。
2.算法流程分析设开始时bestx=[-1,—1,…,—1]则相应的排列树由x[0:n—1]的所有排列构成。
找最小重量机器设计的回溯算法Backtrack是类machine的公有成员。
私有数据成员整型数组Savex保存搜索过的路径,到达叶节点后将数据赋值给数组bestx。
成员bestw记录当前最小重量,cc表示当前花费,cw表示当前的重量。
在递归函数Backtrack中,在保证总花费不超过c的情况下:当i=n时,当前扩展结点是排列树的叶节点。
此时搜索到一个解,判断此时的最小重量是否小于当前最小重量,若小于则更新bestw, 并得到搜索路径bestx.当i〈n时,当前扩展结点位于排列树的第i—1层.当x[0:i]的花费小于给定最小花费时,算法进入排列树的第i层,否则将减去相应的子树。
算法用变量cc记录当前路径x[0:i]的费用。
3。
算法正确性证明通过几组实例证明合法的输入可以得到正确的输出.实例见附录第2部分。
4.算法复杂度分析时间复杂度是O(n2)5.参考文献[1] 王晓东编著,计算机算法设计与分析(第4版)。
北京:电子工业出版社,2012。
26。
附录(1)可执行代码如下:#include<iostream〉using namespace std;#define N 50class MinWmechine{int n; //部件个数int m;//供应商个数int COST; //题目中的Cint cw; //当前的重量int cc;//当前花费int bestw; //当前最小重量int bestx[N];int savex[N];int w[N][N];int c[N][N];public:MinWmechine();void machine_plan(int i);void prinout();};MinWmechine::MinWmechine(){cw=0; //当前的重量cc=0; //当前花费bestw=-1;//当前最小重量bestx[N];savex[N];cout<<”请输入部件个数:";cin〉〉n;cout〈〈”请输入供应商个数:"; cin>〉m;cout<<”请输入总价格不超过:"; cin>〉COST;for(int j=0;j<m;j++){for(int i=0;i〈n;i++)cout〈〈"请输入第"〈〈j+1〈<" 个供应商的第"〈〈i+1<〈”个部件的重量:”;cin>>w[i][j];cout〈〈”请输入第”〈<j+1〈<”个供应商的第”〈<i+1<<”个部件的价格:";cin〉>c[i][j];if(w[i][j]〈0 ||c[i][j]<0){cout〈<"重量或价钱不能为负数!\n";i=i—1;}}}}void MinWmechine::machine_plan(int i){if(i>=n){if(cw 〈bestw || bestw==—1){bestw=cw;for(int j=0;j〈n; j++) //把当前搜过的路径记下来savex[j]=bestx[j];return;}for(int j=0; j<m; j++)//依次递归尝试每个供应商{if(cc+c[i][j]〈COST){cc+=c[i][j];cw+=w[i][j];bestx[i]=j;machine_plan(i+1);bestx[i]=-1;cc-=c[i][j];cw—=w[i][j];}}}void MinWmechine::prinout(){int i,j,ccc=0;for(j=0;j〈m;j++){for(i=0;i〈n;i++){cout<〈"第”<<j+1〈<”供应商的第”<〈i+1〈〈”部件重量:”<〈w[i][j]〈〈" 价格:"<〈c[i][j]<<"\n”;}}for(j=0; j<n; j++){bestx[j]=-1;}machine_plan(0);cout<<”\n最小重量机器的重量是:"〈<bestw〈〈endl;for(int k=0;k〈n;k++){cout<<" 第"〈〈k+1〈〈" 部件来自供应商”〈<savex[k]+1<〈"\n”;ccc+=c[k][savex[k]];}cout〈〈"\n该机器的总价钱是: "<〈ccc<<endl;cout〈<endl;}int main(void){MinWmechine Y;Y。
起重机械主要参数

起重电磁铁
1. 非磁性材料 2. 极掌 2. 3. 铁壳 4. 线圈
(二) 起重电磁铁旳使用要求
6. 起吊钢材时,吸着面或板间不能 有异物或间隙等。 7. 用一台起吊时,吊重量倾斜,甚 至在钢材间滑动,出现危险。应在 水平状态吸吊物长度方向旳中心吊 运。用二台起吊时,一样要注意偏 心问题。如无特殊要求,起重机电 磁铁一般重心偏移应在间距旳10% 范围内。两台起重电磁铁假如间距 很小而偏心很大,如重心位于起重 电磁铁下方,虽然两台起吊也仅一 台承受负荷,非常危险。。
(六) 吊钩组
吊钩组就是吊钩与 动滑轮旳组合体,吊 钩组有长型与短型两 种,如右图
长型吊钩组采用一 般旳钩柄较短旳短吊 钩,支承在吊钩横梁 上,滑轮支承在单独 旳滑轮轴上。它旳高 度较大,使有效起升 高度减小。
(a)、(b)长型吊钩组 (c)、(d)短型吊钩组
二、起重电磁铁
(一) 用途及构造
起重电磁铁、真空吸盘、抓斗 这三类吊具旳本身质量,均须涉 及在起重机旳额定起重量内。即 起吊重物时,一定要用重物质量 与此类吊具本身质量之和去衡量 起重机是否超载。不然将造成事 故。
二、起重机械旳主要参数
起重机械旳参数是体现起重机械工作性能旳技术经济指标, 也是设计、使用和检验起重机械旳根据。掌握有关参数,对 确保起重吊运安全是至关主要旳。起重机械旳主要参数如下。
1、额定起重量 。 2、最大起重量 。 3、跨度 。 4、幅度 。 5、起重力矩 6、起升高度和下降深度 7、运动速度
(三) 根据钢丝绳捻绕旳方向分
3. 混绕绳:
如图e所示,这 种钢丝绳是由 两种相反绕向 旳股捻制而成 旳。其性能介 于顺绕、交绕 绳之间。因为 制造工艺复杂, 极少采用。
机械原理习题及答案
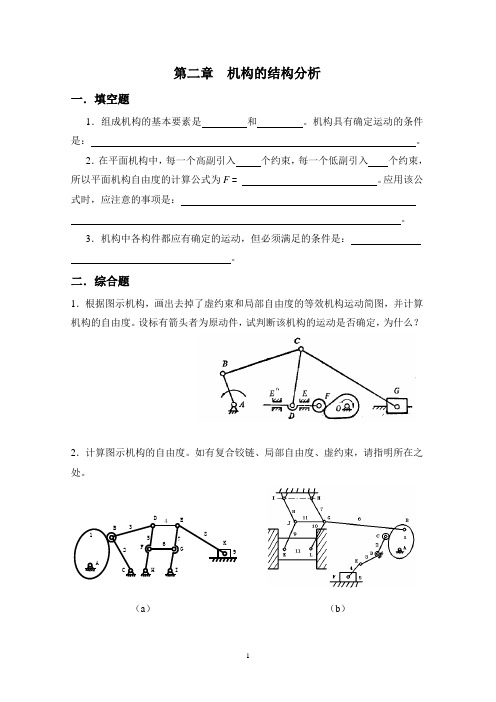
第二章 机构的结构分析一.填空题1.组成机构的基本要素是 和 。
机构具有确定运动的条件是: 。
2.在平面机构中,每一个高副引入 个约束,每一个低副引入 个约束,所以平面机构自由度的计算公式为F = 。
应用该公式时,应注意的事项是: 。
3.机构中各构件都应有确定的运动,但必须满足的条件是: 。
二.综合题1.根据图示机构,画出去掉了虚约束和局部自由度的等效机构运动简图,并计算机构的自由度。
设标有箭头者为原动件,试判断该机构的运动是否确定,为什么?2.计算图示机构的自由度。
如有复合铰链、局部自由度、虚约束,请指明所在之处。
(a ) (b )ADECHGF IBK1234567893.计算图示各机构的自由度。
(a)(b)(c)(d)(e)(f)4.计算机构的自由度,并进行机构的结构分析,将其基本杆组拆分出来,指出各个基本杆组的级别以及机构的级别。
(a)(b)(c)(d)5.计算机构的自由度,并分析组成此机构的基本杆组。
如果在该机构中改选FG 为原动件,试问组成此机构的基本杆组是否发生变化。
6.试验算图示机构的运动是否确定。
如机构运动不确定请提出其具有确定运动的修改方案。
(a)(b)第三章平面机构的运动分析一、综合题1、试求图示各机构在图示位置时全部瞬心的位置(用符号P直接在图上标出)。
ij2、已知图示机构的输入角速度ω1,试用瞬心法求机构的输出速度ω3。
要求画出相应的瞬心,写出ω3的表达式,并标明方向。
3、在图示的齿轮--连杆组合机构中,试用瞬心法求齿轮1与3的传动比ω1/ω2。
4、在图示的四杆机构中,AB l =60mm, CD l =90mm, AD l =BC l =120mm, 2ω=10rad/s ,试用瞬心法求:(1)当ϕ=165°时,点C 的速度c v ;(2)当ϕ=165°时,构件3的BC 线上速度最小的一点E 的位置及其速度的大小; (3)当0c v =u u u v时,ϕ角之值(有两个解)。
重量稽核整改报告范文

重量稽核整改报告范文尊敬的领导:您好!咱们之前的重量稽核工作出了点小岔子,就像一个原本整齐的拼图缺了几块,不过没关系,我们已经找到了那些缺失的部分并且正在努力把这个拼图重新拼好。
现在就给您详细说说我们的整改情况。
一、问题发现。
在之前的重量稽核过程中,我们发现了一些问题,就像在一场寻宝游戏里发现了陷阱一样。
1. 测量工具不准。
有一部分秤就像喝醉了酒的士兵,测出来的重量摇摇晃晃,一点都不稳定。
比如说,同一袋东西,在不同时间称,重量能差个半斤八两,这可太离谱了。
经过检查,原来是有些秤的传感器老化了,就像人的眼睛老花了一样,看东西模糊不清,导致测量不准。
2. 操作流程不规范。
有些员工在称重的时候就像在赶火车一样匆匆忙忙,步骤丢三落四。
没有对秤进行校准就直接开始称重,或者称重的时候物品摆放位置不规范,有的东西都快掉秤外面了,这样称出来的重量肯定不准确。
3. 数据记录混乱。
数据记录就像是一团乱麻,让人摸不着头脑。
有时候字迹潦草得像天书,有的时候记录不及时,等想起来写的时候,可能都已经忘了具体数字是多少,就随便写了一个。
而且不同的人记录的格式也不一样,就像每个人都有自己的一套小规则,这给后续的数据核对和分析带来了巨大的麻烦。
二、整改措施。
# (一)测量工具的修复与更新。
1. 我们请来了专业的“秤医生”(维修人员),对那些老弱病残的秤进行了一次大检查。
把那些老化的传感器都换了,就像给生病的士兵换上了新的眼睛,让他们重新能够精准地看清重量。
总共修好了[X]台秤,花费了[具体金额],不过这钱花得值,就像给汽车换了新的轮胎,能跑得又稳又快。
2. 对于那些已经病入膏肓、修不好的秤,我们毫不留情地把它们淘汰了,就像把一匹老马送去安享晚年一样。
然后购买了[X]台新的、高精度的秤,这些新秤就像刚入伍的新兵,充满活力,能够准确地测量重量。
新秤都附带了校准证书,确保一上岗就能提供准确的数据。
# (二)规范操作流程。
1. 我们制定了一份像游戏攻略一样详细的操作手册。
机器设备评估常用数据与参数
机器设备评估常用数据与参数一、性能参数:1.功率:机器设备的功率是指其在单位时间内完成工作的能力,通常以千瓦(kW)为单位。
功率的大小直接影响机器设备的工作效率和生产能力。
2. 转速:机器设备的转速表示机器设备旋转的速率,通常以每分钟转数(rpm)为单位。
转速的快慢对机器设备生产效率和工作质量都有一定的影响。
3.扭矩:机器设备的扭矩是指机器设备旋转时的力矩大小,通常以牛顿·米(N·m)为单位。
扭矩的大小直接影响机器设备的驱动能力和抗负载能力。
二、质量参数:1.重量:机器设备的重量是指其整体重量,包括设备本身及其附件等。
重量的大小与机器设备的稳定性、承载能力有关,对安全性和工作效率有一定的影响。
2.材料强度:机器设备的材料强度反映了材料的抗拉、抗压、抗弯等性能,通常以抗拉强度、屈服强度等方式表示。
材料强度对机器设备的使用寿命和抗负载能力有很大影响。
三、可靠性参数:1.故障率:机器设备的故障率是指其在使用过程中出现故障的频率。
故障率低的机器设备具有较高的可靠性和稳定性。
2.平均无故障时间(MTBF):机器设备的MTBF是指运行一段时间内平均无故障的时间。
MTBF的大小反映了机器设备的可靠性。
四、维修参数:1.维修周期:机器设备的维修周期是指需要进行维修保养的时间间隔。
维修周期的长短决定了机器设备的连续工作时间和维修成本。
2.维修时间:机器设备的维修时间是指进行维修保养的时间长度。
维修时间的长短直接影响机器设备的可用性和工作效率。
五、使用寿命参数:1.设计寿命:机器设备的设计寿命是指该设备在设计时预期的使用年限。
设计寿命长的机器设备具有较长的使用寿命和持久的性能稳定性。
2.使用寿命:机器设备的使用寿命是指该设备实际使用过程中的寿命。
使用寿命与设备的质量、维护情况等有关,经过合理维护的机器设备使用寿命长。
对于不同种类的机器设备,其评估所使用的数据与参数可能有所不同。
综上所述,在机器设备评估中,常用的数据与参数包括性能参数、质量参数、可靠性参数、维修参数和使用寿命参数。
算法实验报告范文

算法实验报告范文《算法设计与分析》实验报告班级姓名学号年月日目录实验一二分查找程序实现…………………………………………………………………03页实验二棋盘覆盖问题(分治法).…………………………………………………………08页实验三0-1背包问题的动态规划算法设计……………………………………………….11页实验四背包问题的贪心算法………………………………………………………………14页实验五最小重量机器设计问题(回溯法)………………………………………………17页实验六最小重量机器设计问题(分支限界法)…………………………………………20页指导教师对实验报告的评语成绩:指导教师签字:年月日2实验一:二分查找程序实现一、实验时间:2022年10月8日,星期二,第一、二节地点:J13#328二、实验目的及要求目的:1、用c/c++语言实现二分搜索算法。
2、通过随机产生有序表的方法,测出在平均意义下算法比较次数随问题规模的变化曲线,并作图。
三、实验环境平台:Win732位操作系统开发工具:Codeblock10.05四、实验内容对已经排好序的n个元素a[0:n-1],现在要在这n个元素中找出一特定元素某。
五、算法描述及实验步骤算法描述:折半查找法也称为二分查找法,它充分利用了元素间的次序关系,采用分治策略,可在最坏的情况下用O(logn)完成搜索任务。
它的基本思想是,将n个元素分成个数大致相同的两半,取a[n/2]与欲查找的某作比较,如果某=a[n/2]则找到某,算法终止。
如果某a[n/2],则我们只要在数组a的右半部继续搜索某。
二分搜索法的应用极其广泛,而且它的思想易于理解。
确定算法复杂度基本步骤:1、首先设定问题规模n;2、随即产生递增数列;3、在n个有序数中随机取一个作为待查找量,搜索之;4、记录查找过程中的比较次数,再次生成新的有序表并查找,记录查找次数,每个数组重复10次;5、改变问题规模n重复上述步骤2~4,n取100、200……1000;6、依实验数据作图,并与理论图作比较;7、二分搜索算法平均查找次数:问题规模为n时,平均查找次数为:A(n)=Int(logn)+1/2//Int()函数为向下取整3即二分搜索算法对于含有n个数据的有序表L平均作了约Int(logn)+1/2次的查找操作。
工业机器人试题(含答案)
工业机器人试题(含答案)一、判断题(共100题,每题1分,共100分)1、( ) 在 ABB 工业机器人的程序结构中, 记录了机器人索要搬运重物的重量、重心等参数的是 loaddata。
A、正确B、错误正确答案:A2、控制系统是包括硬件和软件两部分。
( )A、正确B、错误正确答案:A3、在使用三点法确定工件坐标时, Y1 点用于确定 Y 轴正方向。
A、正确B、错误正确答案:A4、( ) 任何复杂的运动都可以分解成为由多个平移和绕轴转动这样的简单运动合成的A、正确B、错误正确答案:A5、( ) tool0 的坐标是指用户自定义的工具坐标。
A、正确B、错误正确答案:B6、渐开线齿轮的齿廓在其基圆以外的部分必然都是渐开线。
A、正确B、错误正确答案:B7、负载电功率为正值表示负载吸收电能,此时电流与电压降的实际方向一致A、正确B、错误正确答案:A8、( ) ABB 机器人的示教器在默认情况下,正面面对机器人, 摇杆左摇动, TCP 向左运动。
A、正确B、错误正确答案:A9、换向阀靠近弹簧一侧的方框(位)为常态。
A、正确B、错误正确答案:A10、电控柜内电路接线配线应符合的要求:动力配线电路采用电压不低于500V 的铜芯绝缘导线,在满足载流量和电压降及有足够机械强度的情况下, 可采用不小于 1mm2 截面的绝缘导线。
( )(A96)A、正确B、错误正确答案:B11、( ) 示教器编程用于示教——再现型机器人A、正确B、错误正确答案:A12、电源开关为总电源开关闭按钮。
( )A、正确B、错误正确答案:B13、机器人编程就是针对机器人为完成某项作业进行程序设计。
( )A、正确B、错误正确答案:A14、机器人世界的描述是指与机器人进行作业的环境。
( )A、正确B、错误正确答案:B15、硅钢可以用来制造变压器的铁芯。
A、正确B、错误正确答案:A16、安装保险丝时,应做到:固定熔丝应加平垫片。
( )(A96)A、正确B、错误正确答案:A17、默认情况下,正面面对机器人, 摇杆上下摇动,TCP 沿 X 轴运动。
最小的地下金属探测器是什么

虽然天降横财是很少发生的事情,但是英国的很多土地下面却埋藏了数不尽的宝藏。
这不一对英国夫妇就使用简简单单的金属探测仪多年来在各地发现了上千枚的古币,有些古币的历史甚至可以追溯到一千多年前,而这些文物也是价值连城。
当这些新闻一经播出,有些人也按捺不住了,想购买这类器材进行寻宝。
下面罗列一下各类地下金属探测器最小的型号一:MINELAB型号GOLD MONSTER 1000,这是目前全球高端探金市场最小巧便携的产品,金龙1000.探测天然金对探测器有着极高的要求,在堆叠技术的同时,体重也是相当可观,这款机器解决了探金爱好者的一个难题,尤其是全球探金的人们地区非洲,轻便又廉价的觅宝金龙1000广受好评。
它的参数是:最大起重量:1.33kg;功率:12kW;关键技术:超宽动态范围45khz VLF;歧视:黄金机会指标(高/低);地面平衡:自动追踪;噪声消除:自动;灵敏度调整:1–10。
功能特色是:全自动操作;额外的敏感的45 kHz低频性能;适应性强的,包括2个搜索线圈,方便快速启动;优于其他单一频率的低频黄金探测器;改善了黑色和有色歧视的处理,使其最大限度地发挥你的黄金回收的选择之一;自动噪声消除、自动地平衡、更快的处理器、自动灵敏度。
一款探测器能顺利探测地下金属的前提是最基层的地平衡降噪技术,澳大利亚觅宝,美国盖瑞特,怀特,费舍尔等品牌的地平衡技术都不错,尤其是觅宝,在探盘机,探金机,军工排雷,海滩等领域都是第一,尤其是后三者,其他品牌的地平衡处理还不足以进入这几个领域,为什么地平衡这么重要,在1926年电磁波金属探测器运用以来直到60年代才可以探测地下金属,之前只是运用在战争中探测人体的子弹等其他行业应用,因为土壤中含有的金属,金属颗粒,金属氧化物吗,无机盐成分非常多,探测器的探盘在发射电磁波以后“听”到的土壤矿化信号非常强,是地下一枚钱币的几十倍,所以探测器只能乱叫报警,无法正常工作。
直到地平衡降噪技术出现以后,金属探测器可以消除土壤矿化的信号,顺利探测到地下埋藏的金属。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
int n = 3;
int d = 4;
int[][] c = {{1,3,2},{2,2,2},{3,1,2}};
int [][] w = {ห้องสมุดไป่ตู้1,3,2},{2,2,2},{3,1,2}};
int minWeight = Integer.MAX_VALUE;
int nowValue = 0;
nowValue -= c[j][t];
}
}
return flag;
}
public static void main(String[] args){
getMinWeight gm = new getMinWeight();
if(gm.Backtrack(0)== false)
System.out.println("未找到符合条件的解");
else{
System.out.println("零件能够达到的最小重量为"+gm.minWeight); System.out.print("购买路径为: ");
for(int i : gm.bestWay)
System.out.print(i+" ");
}
}
}
3.
nowValue += c[j][t]; way[t] = j; //进行剪枝函数,在当前节点符合条件,才继续迭代搜索下去,不符合条件,直接跳过进行下一个商家的搜索。
if(tempWeight < minWeight && nowValue <= d)
Backtrack(t+1); tempWeight -= w[j][t];
int tempWeight;
int[] bestWay = new int[n];
int[] way = new int[n];
boolean flag = false;
//开始回溯算法,假设目前搜索到子集树的第t层。
public boolean Backtrack(int t){
//如果t已经大于了n-1,表明之前的搜索已经到达了叶子节点,现在的tempWeight已经是当前的最小值了。
最小机器重量问题
1.
最小重量机器设计问题:设某一机器由n个部件组成,每一种部件都可以从m个不同的供应商处购得。设wij是从供应商j处购得的部件i的重量,cij是相应的价格。试设计一个算法,给出总价格不超过c的最小重量机器设计。
2.
package BackTrack;
public class getMinWeight {
if(t > n-1 ){
minWeight = tempWeight;
for(int i=0;i<n;i++)
bestWay[i] = way[i];
flag = true;
}
//当搜索还没有到叶子节点时,对于每一层,选定每个商家继续搜索下去。
else{
for(int j=0;j<m;j++){
tempWeight += w[j][t];