自动控制理论(邹伯敏)第四章答案
自动控制原理参考答案-第4章

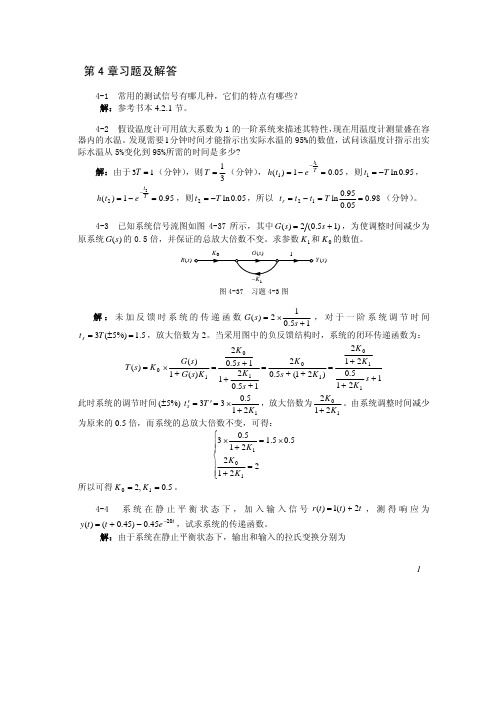
d) 与虚轴交点:
特征方程: s3 + 2s2 + (2 + Kg )s + 3Kg = 0
s3
1
2+ Kg
s2
2
3Kg
s1 2 − 0.5Kg
s0
3Kg
当 Kg = 4 时, 2s2 +12 = 0 ⇒ s = ±2.45 j
e) 出射角: βsc = ±180(1+ 2n) − ∑ β + ∑α
s3
1
7
s2
2
Kg −10
s1 12 − 0.5Kg
s0 Kg −10
当 Kg = 24 时, 2s2 +14 = 0 ⇒ s1,2 = ±2.65 j
劳斯表的 s0 行为正 ⇒ Kg > 10 ,即10 < Kg < 24 根轨迹如下图:
题 4-6:已知负反馈控制系统的开环传递函数为
G(s)H(s)
b) 根轨迹趋向: n − m≥ 2 ,则极点-5,-10 之间的根轨迹向右渐进.
c)
渐近线: ⎧⎪⎨ϕk
=
±180(1 + 2
2n)
=
±90o
⎪⎩−σ k = −6.5
d) 分离点与会合点:令 ∂Kg = 0 ∂s
即: 2s3 + 21s2 + 60s +100 = 0 ⇒ s1 = −7.34 ; s2,3 = −1.5794 ± 2.0776j (舍去) 根轨迹如下图:
(4) 稳态速度误差系数是多少?
(5) 系统指标比该点的二阶指标大还是小?如果要求系统有该点二阶指标
的超调量,能否通过改变阻尼线而获得?是增大阻尼比还是减小它?
自动控制理论 第三版(邹伯敏)第04章
求解根轨迹的分离点和会合点
令
G s H s
KB s As
图4-10 根轨迹的分离点和会合点
方程出现重根的条件是 S必须同时满足下列方程 Ds As KB s 0 D s As KB s 0
由上述两式导出确定分 离点和会合点的方程 As B s As B s 0 或 dK 0 ds
根轨迹终点就是当
K0
m l i 1
时根的位臵;
i
1 K0
s p s z 0
l 1
n
当K 0 时,则有
s z 0
i i 1
m
由 此 式 可 知 , 开 环 传 递 函 数 的 零 点 支 的 终 点
zi i 1,2, ,m 是 m条 根 轨 迹 分
i 1 m
p
l 1
n
,n m
4 - 14
l
绘制根轨迹的基本规则
规则1:根轨迹的对称性 由于系统特征方程式的系数均为实数,因而特征根或为实数,或为共轭复 数.根轨迹必然对称于S平面的实轴 规则2:根轨迹的分支数及其起点和终点 闭环特征方程:
n m
s p K s z 0
2
自动控制理论 稳定性:根轨迹若越过虚轴进入S右半平面,与虚轴交点处的K即为临界增益; 稳态要求:根据坐标原点的根数,确定系统的型别,同时可以确定对应的静态误差。 动态性能:对于不同的K值,系统有下列三种不同的工作状态 1) 0≤K<¼ , s1、 s1为两相异的实数根(过阻尼状态) 2) K=¼ , s1、 s1为两相等实根,s1 = s2 =-0.5,(临界阻尼) 3) ¼ <K<≦, s1 、s2为一对共轭复根(欠阻尼) 如要求系统在阶跃信号的作用下,超调量为49%。
自动控制理论邹伯敏第3版课后答案总.doc

《自动控制理论 第2版》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+= (b) ()()141112+⋅-=Cs R R R s U s U (c) ()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++= (b) ()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b) ()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为 ()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 322202202220012000=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
自动控制原理第四章习题解答

4-1 设单位反馈控制系统的开环传递函数 1)(+=∗s K s G试用解析法绘出∗K 从零变到无穷时的闭环根轨迹图,并判断下列点是否在根轨迹上: (-2+j0), (0+j1), (-3+j2) 解:有一个极点:(-1+j0),没有零点。
根轨迹如图中红线所示。
(-2+j0)点在根轨迹上,而(0+j1), (-3+j2)点不在根轨迹上。
4-2 设单位反馈控制系统的开环传递函数 )12()13()(++=s s s K s G 试用解析法绘出开环增益K 从零增加到无穷时的闭环根轨迹图。
解:系统开环传递函数为)2/1()3/1()2/1()3/1(2/3)(++=++=s s s K s s s K s g G 有两个极点:(0+j0),(-1/2+j0),有一个零点(-1/3,j0)。
根轨迹如图中红线所示。
4-3 已知开环零、极点分布如图4-28所示,试概略绘出相应的闭环根轨迹图。
图4-28 开环零、极点分布图4-4 设单位反馈控制系统开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标d): (1) )15.0)(12.0()(++=s s s Ks G解:系统开环传递函数为)2)(5()2)(5(10)(++=++=s s s K s s s Ks g G 有三个极点:(0+j0),(-2+j0),(-5+j0)没有零点。
分离点坐标计算如下:051211=++++d d d 3解方程的010142=++d d 7863.31−=d ,d 88.02−=取分离点为88.0−=d根轨迹如图中红线所示。
(2) )12()1()(++=s s s K s G解:系统开环传递函数为)5.0()1()5.0()1(2/)(++=++=s s s K s s s K s g G有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。
分离点坐标计算如下:115.011+=++d d d 解方程的05.022=++d d 7.11−=d ,d 29.02−=取分离点为7.11−=d ,29.02−=d 根轨迹如图中红线所示。
自动控制理论邹伯敏第3版课后答案总.doc
《自动控制理论 第2版》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+= (b) ()()141112+⋅-=Cs R R R s U s U (c) ()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++= (b) ()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b) ()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为 ()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 322202202220012000=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
自动控制理论基础答案

C
G1G3 G1G2 G3 H 1 G1G2 C R ( s) R( s ) 1 G2 H 1 G1G3 G1G2 G3 H 1 G1G2
2)令R(s)=0, 求出CN(s)
R+ +
G1 (s)
G4 (s)
N
G 2(s) H 1(s) G3(s)
+
+
+ +
C
U r (s)
R2
u c u o -
-
图E2.3 题2-3 RLC电路
+
R1 ur
u u co
C
L
+
IR1
IC
IL
R2 uo c u -
-
Ur -
1 R1
IR1
-
IC
1 C1 s
UC
-
1 R Ls IL 2
Uo
U o ( s) R2 G( s) U r ( s) ( R1Cs 1)(Ls R2 ) R1
C(s)
G4 (G1G3 G1G2 G3 H 1 G1G2 ) 1 G2 H 1
N(s)
+ + G1G3 G1G2 G3 H 1 G1G2 1 G2 H 1
C(s)
G4 (G1G3 G1G2 G3 H 1 G1G2 ) 1 G2 H 1
C (s) 1 G2 H1 G4 (G1G3 G1G2 G3 H1 G1G2 ) 则 N ( s) 1 G2 H1 G1G3 G1G2 G3 H1 G1G2 1 G2 H 1 G4 (G1G3 G1G2 G3 H 1 G1G2 ) C N ( s) N ( s) 1 G2 H 1 G1G3 G1G2 G3 H 1 G1G2
《自动控制理论(第版)》邹伯敏课件第4章
i1
n
n
s n pl s n1
pl
l 1
l 1
3、用分子除以分母得
GsH s
K0
s nm
n l 1
pl
m i 1
zi s nm1
2020/5/4
第四章 根轨迹法
14
自动控制理论
当s 时,
令某系统的开环传递函数为W s
s
K0
A
nm
K0
snm
n
m
s nm1
A
1 W s 0,有n m条根轨迹分支,它们是由实轴上s σA点出发的射线,
图4-4 一阶系统
2020/5/4
图4-5 图4-4系统的等增益轨迹和根轨迹
第四章 根轨迹法
6
自动控制理论
结论:
根轨迹就是s 平面上满足相角条件点的集合。由于相角条件是绘制根轨迹 的基础,因而绘制根轨迹的一般步骤是:
➢找出s 平面上满足相角条件的点,并把它们连成曲线 ➢根据实际需要,用幅值条件确定相关点对应的K值
例4-4
已知GsH s
ss
K0
4s 2
4s
20
求根的分离点
图4-12 例4-4的根轨迹
解:1)有4条根轨迹分支,它们的始点分别为0,-4,-2±j4
2) 渐近线与正实轴的夹角
2k 1 , 3 , 5 , 7 , k 0,1,2,3
4
44 4 4
渐近线与实轴的交点为
2020/5/4
-A
422 4 第四章
规则2:根轨迹的分支数及其起点和终点
闭环特征方程:
n
m
s pl K 0 s zi 0
l 1
自动控制原理 4-5章习题与解答习题课后校对稿
可知: K 增大时, % , t p 。
4
4-9 设电子心率起搏器系统如图 4-41 所示,其中模仿心脏的传递函数相当于一个纯积 分器。要求:
(1)若 0.5 对应于最佳响应情况,问该情况下起搏器的增益 K 应为多大?
(2)若期望心速为 60 次/min,并突然接通起搏器,问 1 s 后实际心速为多少?瞬时最大 心率为多大?
10(s 2) , s2 (s 20)
以及 R(s) 1 s
2 s2
则 T (s) Y (s) 10 。 R(s) s 20
4-5 某控制系统结构图如图 4-38 所示,其中 K1 5 , T1 0.5 。 (1)求系统的单位阶跃响应; (2)计算系统的性能指标 tr , t p , ts ( 5% ), % ;
T1 5T1
(1)该系统的单位阶跃响应为
y(t) 2.51
e nt 1 2
sin(d t
)
2.51
23 3
e nt
sin(
3t
)
3
2.51
1.1547e t
sin(1.7321t
3
)
(2)系统的性能指标为:
解之得: K 25 , n 25
(2)闭环传递函数写为: T (s)
s2
625 25s 625
,闭环极点 s1,2
12.5
j12.5
3。
方法一:系统的阶跃响应为
y(t) 1
1 1
2
e nt
sin( n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(a)(b) (c)
(d)(e) (f)
题4-2
解:
由开环传递函数容易得到 ,三个极点分别为 ,因此,有3条根轨迹趋于无穷远,其渐近线倾角为 ,渐近线与实轴交点为 。
下面确定根轨迹的分离点和汇合点
计算根轨迹的出射角与入射角
确定根轨迹与虚轴的交点
题4-5
解:
由开环传递函数容易得到 ,三个极点分别为 ,因此,有3条根轨迹趋于无穷远,其渐近线倾角为 ,渐近线与实轴交点为 。
下面确定根轨迹的分离点Байду номын сангаас汇合点
(2) 过s平面原点,与实轴负方向夹角为 作射线,与根轨迹的交点即为主导极点。由图知,主导极点为 。又 ,所以
题4-9
解:
系统的闭环传递函数 ,等效开环传递函数为 。
由等效开环传递函数容易得到 ,两个极点和一个零点分别为 ,因此,有1条根轨迹趋于无穷远,其渐近线倾角为 。
所以
(2)系统的闭环传递函数可以近似为
下面确定根轨迹的分离点和汇合点
计算根轨迹的出射角与入射角
题4-12
解:
由开环传递函数容易得到 ,三个极点分别为 ,因此,有3条根轨迹趋于无穷远,其渐近线倾角为 ,渐近线与实轴交点为 。
下面确定根轨迹的分离点和汇合点
确定根轨迹与虚轴的交点
(1)令
过s平面原点,与实轴负方向夹角为 作射线,与根轨迹的交点即为主导极点。由图知,主导极点为 。又
下面确定根轨迹的分离点和汇合点
确定根轨迹与虚轴的交点
(2)要产生阻尼振荡,需要 。当 ,所以,当 系统呈阻尼振荡。
(3)当 ,系统产生持续等幅振荡,振荡频率为
(4) 过s平面原点,与实轴负方向夹角为 作射线,与根轨迹的交点即为主导极点。由图知,主导极点为 。又
所以
题4-6
解:
(1)由开环传递函数容易得到 ,三个极点和一个零点分别为 ,因此,有2条根轨迹趋于无穷远,其渐近线倾角为 ,渐近线与实轴交点为 。