基于组态王单容水箱控制课程设计
基于组态王的水箱液位控制系统
理 器 ,具有 四则运算 、逻辑 判断、命 态 王 图形 界 面 开 发 功 能使 用 方 便 ,对
/ O 设 备 广 泛 支 持 ,是 国 内 研 发 的 最 2 工艺简述 令识别等运算功 能 ,有 的还能够进行 l
湖北师 范 学院机 电 与控制 工程 学院 叶 梦君 胡长 晖 张 先鹤 万里 光 詹 习生
Y e Me n g j u n Hu Ch a n g h u i Z h a n g X i a n h e Wa n L i g u a n g Z h a n X i s h e n g
对 于相关 的工 程应 用具 有一 定 的价值 。 关键 词 :组态 王 智 能仪 表 P I D
Ab st r a c t :Th i s ar t i c l e d e s c r i b e s t h a t Ki n g Vi e w s o f t wa r e d e s i gn Mo n i t o r i n g i n t er f a c e wh i c h o f s i n g l e c ap a c i t y wa t e r t a n k l e ve l PI D c o n t r o l s y s t e m an d Ki n g Vi e w c o mm u n i c a t i on wi t h
基于组态王的水箱液位控 制系统
De s i g n an d I mp l eme n t a t i o n o f Si n g l e Cap a c i t y Wa t e r L e v el PI D Con t r ol Sy s t e m B a s e d o n Ki n g v i e w
组态王-水箱水位控制
自动化应用软件实训1 绪论组态王Kingview是一种通用的工业监控软件,它融过程控制设计、现场操作及工厂资源管理于一体,将一个企业内部的各种生产系统和应用以及信息交流汇集在一起,实现了最优化管理。
适用于从单一设备的生产运营管理和故障诊断,到网络结构分布式大型集中监控管理系统的开发。
在日常生活中,我们最常见的就是对储水罐液位的控制,系统是根据用户使用水的情况自动向储水罐中注水,确保储水罐也为保持在一定范围内。
在这里我们运用组态王对单容水箱液位控制系统进行自动控制。
2 系统需求分析为了保证系统所需用水的供给,供水系统必须能够及时的对各种用水对象进行供水。
这就要求水塔和储水箱的水位不能低于一定的下限以免断水对人们的正常生活所带来的影响,同时水塔和储水箱的水位又不能高于一定的上限,从而使得水资源可以合理的分配利用。
如果使用组态王来实现软硬结合的控制,将会给系统的各性能带来良好的提升。
3 系统方案论证整个供水系统可以抽象为原水箱和储水箱两个容器的液位控制。
原水箱的水来自地下,储水箱的液位由水塔的水泵和储水箱的出水阀门综合决定。
各种工业用水和生活用水可以用其对应的储水箱的出水管道代替。
这样系统就组态好了。
单容水箱液位控制系统主要有以下几个基本环节组成:被控对象(水箱)、液位测量变送器、控制器(计算机)、执行机构(电动调节阀)、水泵、储水箱。
本文的设计原理:当注水阀和用户阀同时打开时,水箱液位以较小的速度增长,增到(60,80)范围内,水位达到动态平衡;当用户阀关闭时,水箱液位以较快速度增长,增到(80,90)范围内,注水阀自动关闭;当注水阀关闭,用户阀打开时,水位下降到30以下,注水阀自动打开。
水位高于80和低于30时,报警指示灯开始闪烁,提醒工作人员系统是否正常工作。
这样便实现了单容水箱液位的自动控制。
4 系统监控界面设计设计的界面有:水箱水位监控界面,实时曲线界面,实时报表界面,报警记录界面、历史曲线界面。
基于组态王的水箱液位控制系统设计与开发
数据 的方 式进 行性 阐述 。这表 明需要进行数据 库 的设计 。而且 工控 对 象中 的所有 属 性都 是通 过 该数 据 库 中的变 量 进行 描述
的 。 最 后 就 是 所 谓 的连 接 。 如 何 将 数 据 以及 图 形 界 面 里 面 的 相 关 图 素 进 行 连 接 ,指 的 是 通 过 采 取 特 定 的一 种 动 画对 现 场 中 的 设 备 进 行 模拟 。 而 且 还 需 要 涉 及 到 控 制 设 备 的 输 入 指 令 如 何 进
变 量 如就是所谓 的可编程 序控制器 ,P L C在
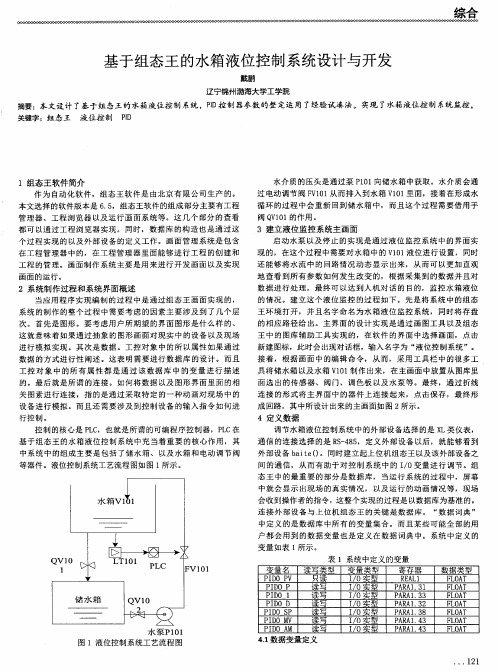
基 于 组 态 王 的 水 箱 液 位 控 制 系 统 中 充 当着 重 要 的 核 心 作 用 , 其 中 系 统 中 的 组 成 主 要 是 包 括 了 储 水 箱 、 以及 水 箱 和 电动 调 节 阀 等 器 件 。 液位 控 制 系 统 工 艺 流程 图 如 图 1 所示 。
现 的,在这个过程 中需要对水箱 中的 V I O l液位进行设置 ,同时
还 能 够 将 水 流 中 的 回路 情 况 动 态 显 示 出来 ,从 而 可 以更 加 直 观 地 查 看 到 所 有 参 数 如 何 发 生 改 变 的 , 根 据 采 集 到 的数 据 并 且 对 数 据 进 行 处 理 ,最 终 可 以达 到 人 机 对 话 的 目的 , 监 控 水 箱 液 位 的情 况 。 建 立 这 个 液 位 监 控 的过 程 如 下 。先 是将 系 统 中 的 组 态 王 环 境 打 开 ,并 且 名 字 命 名 为 水 箱 液 位 监 控 系 统 , 同 时将 存 盘 的相 应 路 径 给 出 。 主 界 面 的 设 计 实现 是 通 过 画 图工 具 以及 组 态 王 中 的 图库 辅 助 工 具 实 现 的 ,在 软 件 的 界 面 中选 择 画 面 , 点 击 新 建 图标 ,此 时会 出现 对 话 框 ,输 入 名 字 为 “ 液位控制系统”。 接 着 , 根 据 画 面 中 的编 辑 命 令 ,从 而 , 采 用 工 具 栏 中 的 很 多 工
组态王单容水箱控制课程设计

过程控制系统课程设计基于组态软件单容水箱过程控制系统姓名:学号:班级:专业:指导教师:目录1 设计目的与要求 (1)1.1 设计目的 (1)1.2 设计要求 (1)2 系统结构设计 (1)2.1 控制方案 (1)2.2 系统结构 (2)3 过程仪表选择 (2)3.1 液位传感器 (2)3.2 电磁流量传感器 (3)3.3 电动调节阀 (3)3.4 水泵 (3)3.5 变频器 (4)3.6 模块选择 (4)4 系统组态设计 (4)4.1工艺流程图与系统组态图设计 (5)4.2 组态画面 (5)4.3 数据字典 (6)4.4 应用程序 (6)4.5 动画连接..................................... 错误!未定义书签。
总结. (12)参考文献 (12)附录A 单回路控制系统PID控制算法 (13)附录B PID控制算法流程图 (13)1. 设计目的与要求1.1 设计目的通过组态软件,结合实验已有设备,按照定值系统的控制要求,根据较快较稳的性能要求,采用但闭环控制结构和PID控制规律,设计一个具有美观组态画面和较完善组态控制程序的液位单回路过程控制系统。
1.2 设计要求(1) 根据液位单回路过程控制系统的具体对象和控制要求,独立设计控制方案,正确选用过程仪表。
(2) 根据液位单回路过程控制系统A/D、D/A和开关I/O的需要,正确选用过程模块。
(3) 根据与计算机串行通讯的需要,正确选用RS485/RS232转换与通讯模块。
(4) 运用组态软件,正确设计液位但回路过程控制系统的组态图、组态画面和组态控制程序。
(5) 提交包括上述内容的课程设计报告。
2. 系统结构设计2.1 控制方案整个过程控制系统由控制器、调节器、测量变送、被控对象组成。
在本次控制系统中控制器为计算机,采用算法为PID控制规律(见附录A和附录B),调节器为电磁阀,测量变送为HB、FT两个组成,被控对象为流量PV。
单容水箱液位组态控制实验报告

4 单容水箱液位组态控制实验报告学院:自动化学院班级:学号:姓名:单容水箱液位组态一.实验目的:1.熟悉单容水箱液位调节阀PID 控制系统工作原理2.熟悉单用户项目组态过程3.掌握WINCC 画面组态设计方法4.掌握WINCC 过程值归档的组态过程5.掌握WINCC 消息系统的组态过程6.掌握WINCC 报表系统的组态过程二:单容水箱实验原理1、实验结构介绍水流入量Qi 由调节阀u 控制,流出量Qo 则由用户通过闸板开度来改变。
被调量为水位H 。
分析水位在调节阀开度扰动下的动态特性。
直接在调节阀上加定值电流,从而使得调节阀具有固定的开度。
(可以通过智能调节仪手动给定,或者AO 模块直接输出电流。
)调整水箱出口到一定的开度。
突然加大调节阀上所加的定值电流观察液位随时间的变化,从而可以获得液位数学模型。
通过物料平衡推导出的公式:μμk Q H k Q i O ==,那么 )(1H k k Fdt dH -=μμ, 其中,F 是水槽横截面积。
在一定液位下,考虑稳态起算点,公式可以转换成μμR k H dtdH RC =+。
公式等价于一个RC 电路的响应函数,C=F 就是水容,k H R 02=就是水阻。
给定值 图4-1单容水箱液位数学模型的测定实验如果通过对纯延迟惯性系统进行分析,则单容水箱液位数学模型可以使用以下S 函数表示: )1()(0+=TS S KR S G 。
相关理论计算可以参考清华大学出版社1993年出版的《过程控制》,金以慧编著。
2、控制系统接线表测量或控制量 测量或控制量标号使用PLC 端口 使用ADAM 端口下水箱液位 LT103 AI0 AI0调节阀FV101 AO0 AO03参考结果单容水箱水位阶跃响应曲线,如图4-2所示:图4-2 单容水箱液位飞升特性此时液位测量高度184.5 mm ,实际高度184.5 mm -3.5 mm =181 mm 。
实际开口面积5.5x49.5=272.25 mm²。
基于组态王的双储液罐单水位PID控制系统设计课程设计报告

专业方向课程设计报告题目:基于组态王的双储液罐单水位PID控制系统设计摘要本文主要实现基于组态王的双储液罐单水位PID控制系统,通过对实验系统结构的研究,运用所学的MATLAB知识建立了单容水箱实验系统的数学模型,并对系统的参数进行了辨识,用工业控制软件组态王6.5,使其具有报警画面,历史曲线,实时曲线,报表画面。
关键词:双储液罐,PID控制系统,单容水箱,组态王6.5ABSTRACTThis paper based on the configuration of the double tank water level single PID control system ,make water tank water level, water tank temperature detection, and water tank level control at a given value.Through the study on the structure of the experimental system, uselearned knowledge of MATLAB to establish a single volume tank experimental system mathematical model, and the parameters of the system are identified,use industrial control software kingview 6.5, enables it to have the alarm screen, historical curve, real-time curve, statements frame.KEY WORDS:Double liquid storage tank,PID control system,single volume tank,Configuration king 6.5目录摘要 (Ⅰ)ABSTRACT (Ⅱ)第1章绪论 0第2章系统总体方案 (1)2.1控制系统构成 (1)2.1控制系统过程 (1)第3章水箱建模及参数整定 (2)3.1 水箱的建模过程 (2)3.2 水箱液位的PID整定 (4)第4章组态王6.5简介与操作界面的设计 (5)4.1组态软件介绍 (5)4.2基于组态王6.5的液位控制系统上位机部分设计 (6)4.2.1上位机主控画面 (6)4.2.2上位机功能画面 (9)第5章结论与展望 (8)致谢 (9)参考文献 (10)第1章绪论随着现代科学技术的迅猛发展,工业生产的规模越来越大,结构也越来越复杂,从而使控制对象、控制器以及控制任务和目的日益复杂,而对系统的精度、响应速度和稳定性的要求却越来越高。
基于组态王的水箱液位设计
基于组态王的水箱水位控制设计1 任务要求本系统为基于组态王的储液罐液位的自动控制。
该系统有进水阀、用户阀、水源阀、主水箱、蓄水池,水泵等组成。
系统初始液位为20米,要求控制主水箱的水位在10—80米之间。
主要的两个阀门分别为进水阀和用户阀,刚开始进水阀打开给主水箱进水,同时由于主水箱水位为20米,所以用户阀打开给用户送水,开始之初蓄水池水位高度为80米,所以水源阀会自动关闭。
当主水箱水位下降,水位降至10米时,用户阀会自动关闭,从而让主水箱蓄水保证水位不低于10米。
当主水箱的水位高于80米时,进水阀会自动关闭,从而由于蓄水池水位过低,水源阀将自动打开为蓄水池蓄水。
当水位高于80米或低于10米时会发生高高报警和低低报警,同时弹出报警画面。
同时系统除了设置报警和事件画面还有实时趋势曲线画面、历史趋势曲线画面、实时数据报表画面等,通过各个画面对系统运行情况进行实时监测。
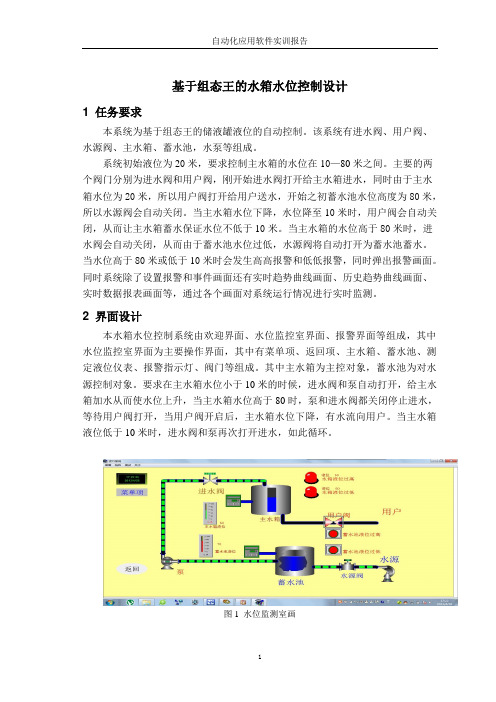
2 界面设计本水箱水位控制系统由欢迎界面、水位监控室界面、报警界面等组成,其中水位监控室界面为主要操作界面,其中有菜单项、返回项、主水箱、蓄水池、测定液位仪表、报警指示灯、阀门等组成。
其中主水箱为主控对象,蓄水池为对水源控制对象。
要求在主水箱水位小于10米的时候,进水阀和泵自动打开,给主水箱加水从而使水位上升,当主水箱水位高于80时,泵和进水阀都关闭停止进水,等待用户阀打开,当用户阀开启后,主水箱水位下降,有水流向用户。
当主水箱液位低于10米时,进水阀和泵再次打开进水,如此循环。
图1水位监测室画3 数据字典设计本系统中主要设计了12个变量,其中a代表具体主水箱的液位,其设定为内存整型,水源1用于提供用水变量设定为内存实型。
阀1,阀3分别为主水箱的进水阀和出水阀,定义为内存离散的,阀2用于为水源蓄水池供水。
泵和指示灯变量都为开关量,也被定义为内存离散型。
下面是数据字典的设计:图2 数据字典4 命令代码设计if(\\本站点\a<15)\\本站点\阀1=1;if(\\本站点\水源1<80){\\本站点\阀2=1;\\本站点\水源1=\\本站点\水源1+10;}if(\\本站点\阀1==1){if(\\本站点\水源1>=80){\\本站点\泵=1;\\本站点\水流控制=10;\\本站点\水源1=\\本站点\水源1-10;if(\\本站点\a<71)\\本站点\a=\\本站点\a+10;else{\\本站点\a=80;\\本站点\阀1=0;\\本站点\泵=0;\\本站点\水流控制=0;}}else{\\本站点\泵=0;\\本站点\水流控制=0;}}if((\\本站点\阀3==1)&&(\\本站点\a>=10)){\\本站点\a=\\本站点\a-5;}5 软件运行演示界面如图所示,图3是水位监控界面即整体的控制中心。
组态软件课程设计

.成绩课程设计报告设计题目组态软件MCGS实现单容水箱PID控制课程名称监控系统程序设计技术姓名张安辉学号2009001107班级自动化0901 导师刘昱光设计日期2012 年 1 月10 日MCGS组态软件实现单容水箱液位PID控制概要开发经济使用的教学实验装置、开拓理论联系实际的实验内容,对提高课程教学实验水平,具有重要的实际意义。
就高校学生的实验课程来讲,由于单容水箱液位控制系统本身具有的复杂性和对实时性的高要求,使得在该系统上实现基于不同控制策略的实验内容,需要全面的掌握自动控制理论及相关知识。
本文通过对单容水箱液位控制系统现状的研究,选取了组态王软件MCGS6.2及PID 控制等策略对实验系统进行实时控制,建立了单容水箱的数学模型。
介绍了PID控制的基本原理及PID算法,并根据算法的比较选择了增量式PID算法,建立了基于组态王MCGS6.2的脚本语言的PID液位控制模拟界面和算法程序,进行系统仿真,并通过PID 参数整定。
过对实验系统结构的研究,建立了单容水箱实验系统是数学模型,并对系统的参数进行了辨识,验证了在组态王MCGS6.2控制下系统具有良好的可控制性和稳定性。
关键字:单容水箱 PID控制增量式PID 组态王MCGS6.2MCGS configuration software to realize the single tankwater level control of PIDAbstractThe development of economic use of the teaching experimental device, develop the theory and practice of the experiment content, to improve the experiment teaching level, has important practical significance. On the college students' experimental course, because the single tank water level control the complexity of this system and the real-time requirements of the high, the system control strategy based on different experimental content, need comprehensive grasp of automatic control theory and related knowledge.This article through to the single tank water level control system and Study on the current status of the Kingview software, select MCGS6.2 and PID control strategy on the experimental system for real-time control, establishes the mathematical model of single water tank. Introduces the basic principle of PID control and PID algorithm, and according to the algorithm comparison and selection of the incremental PID algorithm, based on Kingview MCGS6.2 script language PID level control simulation interface and the algorithm program, system simulation, and by adjusting the parameter of PID. The experimental system structure research, established a single water tank experiment system is a mathematical model, and the system parameters identification, authentication in MCGS6.2 Kingview control system has good controllability and stability.Keywords: Single water tank PID control Incremental PID MCGS6.2 Kingvi目录概要 (I)Abstract (II)第一章设计目的和要求 (1)1.1.设计目的 (1)1.2.设计要求 (1)第二章PID和组态软件MCGS (3)2.1.PID控制算法的介绍 (3)2.1.1.PID算法的历史 (3)2.1.2.PID各个环节的作用 (3)2.1.3.增量式PID控制 (4)2.1.4.PID参数的整定 (5)2.2.流量系数介绍 (6)2.3.MCGS软件介绍 (7)第三章系统设计 (8)3.1.监控系统总体设计 (8)3.1.1.系统介绍 (8)3.1.2.系统设计思想 (8)3.1.3.系统设计框架 (9)3.2.实时数据库组态 (10)3.3.窗口界面组态设计 (11)3.4.实时数据和历史数据的趋势、曲线、报表组态设计 (12)3.5.实时报警信息和历史报警记录的组态设计 (15)3.6.报表输出组态设计 (16)3.7.参数设置界面组态设计 (16)3.8.对象特性组态设计 (17)3.9.运行策略组态设计 (18)3.9.1.各个策略块设置 (18)3.9.2.脚本程序 (19)第四章系统调试和改进 (21)4.1.系统调试 (21)4.1.1系统运行画面 (21)4.1.2系统运行调试 (22)4.2.系统改善 (25)第五章设计总结 (26)参考文献 (27)第一章设计目的和要求1.1.设计目的通过组态软件,按照定值系统的控制要求,根据较快较稳的性能要求,采用单闭环控制结构和pid控制规律,设计一个具有美观组态画面和较完善组态控制程序的液位单回路过程控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
过程控制系统课程设计基于组态软件单容水箱过程控制系统姓名:学号:班级:专业:指导教师:目录1 设计目的与要求 (1)1.1 设计目的 (1)1.2 设计要求 (1)2 系统结构设计 (1)2.1 控制方案 (1)2.2 系统结构 (2)3 过程仪表选择 (2)3.1 液位传感器 (2)3.2 电磁流量传感器............................... 错误!未定义书签。
3.3 电动调节阀 (3)3.4 水泵 (3)3.5 变频器 (4)3.6 模块选择 (4)4 系统组态设计 (4)4.1工艺流程图与系统组态图设计 (5)4.2 组态画面 (5)4.3 数据字典 (6)4.4 应用程序 (6)4.5 动画连接..................................... 错误!未定义书签。
总结. (12)参考文献 (12)附录A 单回路控制系统PID控制算法 (13)附录B PID控制算法流程图 (13)1. 设计目的与要求1.1 设计目的通过组态软件,结合实验已有设备,按照定值系统的控制要求,根据较快较稳的性能要求,采用但闭环控制结构和PID控制规律,设计一个具有美观组态画面和较完善组态控制程序的液位单回路过程控制系统。
1.2 设计要求(1) 根据液位单回路过程控制系统的具体对象和控制要求,独立设计控制方案,正确选用过程仪表。
(2) 根据液位单回路过程控制系统A/D、D/A和开关I/O的需要,正确选用过程模块。
(3) 根据与计算机串行通讯的需要,正确选用RS485/RS232转换与通讯模块。
(4) 运用组态软件,正确设计液位但回路过程控制系统的组态图、组态画面和组态控制程序。
(5) 提交包括上述内容的课程设计报告。
2. 系统结构设计2.1 控制方案整个过程控制系统由控制器、调节器、测量变送、被控对象组成。
在本次控制系统中控制器为计算机,采用算法为PID控制规律(见附录A和附录B),调节器为电磁阀,测量变送为HB、FT两个组成,被控对象为流量PV。
结构组成如下图2.2所示。
当系统启动后,水泵开始抽水,通过管道将水送到上水箱,由HB返回信号,是否还需要抽水到水箱。
若还需要(即水位过低),则通过电磁阀控制流量的大小,加大流量,从而使下水箱水位达到合适位置;若不需要(即水位过高或刚好合适),则通过电磁阀使流量保持或减小。
其整个流程图如图2.1所示。
图2.1 液位单回路控制系统图2.2 系统结构过程控制系统由四大部分组成,分别为控制器、调节器、被控对象、测量变送。
本次设计为流量回路控制,即为闭环控制系统,如下图2.2.图2.2 液位单回路控制系统框图3.过程仪表选择3.1 液位传感器液位传感器用来对上水箱液位的压力进行检测,采用工业的DBYG扩散硅压力变送器,本变送器按标准的二线制传输,喜爱用高品质低耗精密器件,稳定性、可靠性大大提高。
可方便的与其他DDZ—3X型仪表互换配置,并能直接替换进口同类仪表。
校验的方法是通电预热15分钟后,分别在零压力和满程压力下检查输出电流值。
在零压力下调整量程电位器,使输出电流为4mA,在满量程压力下调整量程电位器,使输出电流为20mA。
本传感器精度为0.5级,因为为二线制,故工作时需串24V直流电源。
压力传感器用来对上水位水箱和中水位水箱的压力进行检测,采用工业用的DBYG扩散硅压力变送器,0.5级精度,二线制4-20mA 标志信号输出。
3.2 电磁流量传感器(1)流量传感器用来对电动调节阀的主流量和干扰回路的干扰流量进行检测。
根据本试验装置的特点,采用工业用的LDS-10S型电磁流量传感器,公称直径10mm,流量0~.03m3/h,压力1.6Mpmax,4-20mA标准信号输出。
可与显示,记录仪表,积算器或调节器配套。
避免了涡轮流量计非线性与死区大的致命缺点,确保实验效果能达到教学要求。
主要优点:1)采用整体焊接结构,密封性好;2)结构简单可靠,内部无活动部件,几乎无压力损失;3)采用低频矩形波励磁,抗干扰性能好,零点稳定;4)仪表反映灵敏,输出信号与流量呈线性关系,量程比宽;(2)流量转换器采用LDZ-4型电磁流量传感器配套使用,输入信号:0~0.4mV 输出信号:4~20mA DC, 许负载电阻为0~750欧姆,基本误差:输出信号量程的0.5%。
3.3 电动调节阀电动调节阀对控制回路流量进行调节。
采用德国PSL202型智能电动调节阀,无需配伺服放大器,驱动电机采用高性能稀土磁性材料制造的同步电机,运行平稳,体积小,力矩大,抗堵转,控制精度高。
控制单元与电动执行机构一体化,可靠性高,操作方便,并可与计算机配套使用,组成最佳调节回路。
有输入控制信号4-20mA及单相电源即可控制与转实现对压力流量温度压力等参数的调节,具有体积小,重量轻,连线简单,泄漏量少的优点。
采用PS电子式直行程执行机构,4-20mA阀位反馈信号输出双导向单座柱塞式阀芯,流量具有等百分比特性,直线特性和快开特性,阀门采用弹簧连接,可预置阀门关断力,保证阀门的可靠关断,防止泄露。
性能稳定可靠,控制精度高,使用寿命长等优点。
3.4 水泵采用丹麦兰富循环水泵。
噪音低,寿命长,不会影响教师授课减少使用麻烦。
功耗小,220V供电即可,在水泵出水口装有压力变送器,与变送器一起可构成恒压供水系统。
3.5 变频器三菱FR-S520变频器,4-20mA控制信号输入,可对流量或压力进行控制,该变频器体积小,功率小,功能非常强大,运行稳定安全可靠,操作方便,寿命长,可外加电流控制,也可通过本身旋钮控制频率。
可单相或三相供电,频率可高达200Hz。
3.6 模块选择当需要构成计算机控制系统时,过程控制装置的数据采集和控制采用目前最新的牛顿7000系列远程数据采集模块和组态软件组成,完全模拟工业现场环境,先进性与实用性并举。
有效的拉近了实验室与工业现场的距离。
它体积小,安装方便,可靠性极高。
1) D/A模块:采用牛顿7024模块。
4路模拟输出,电流(4-20mA)电压(1~5V)信号均可。
2) A/D 模块:采用牛顿7017模块。
8路模拟电压(1~5V)输入。
3) DO模块:采用牛顿7043模块。
4)通讯模块:采用牛顿7520转换模块。
485/232转换模块,转换速度极高(300~115KHz),232口可长距离。
4. 系统组态设计组态王是运行在Windows98/NT/2000上的一种组态软件。
使用组态王,用户可以方便地构造适应自己需要的“数据采集和监控系统”,在任何需要的时候把生产现场的信息处理和判断决策的控制信号传向现场实施有效的生产控制。
组态王的网络功能使企业的基层和其它部门建立起联系,现场操作人员和工厂管理人员都可以看到各种数据。
管理人员不需要深入生产现场,就可以获得实时和历史数据,优化控制现场作业,提高生产率和产品质量。
组态网易于学习和使用,拥有丰富的工具箱、图库和操作向导,既可以节省您的大量时间,又能提高系统性能。
组态王可用于电力、制冷、化工、机械制造、交通管理等多种工程领域。
无论您的应用场合如何,您都可以使用组态王构造有效的监控和数据采集系统。
4.1工艺流程图与系统组态图设计图4.1.1 工艺流程图 图4.1.2 系统组态图设计4.2 组态画面4.3 数据字典4.4 应用程序if(\\本站点\开关转换==1){\\本站点\Ti=8;\\本站点\Kp=15;\\本站点\Td=10;if(\\本站点\电机==1 &&\\本站点\开关==0){\\本站点\ek0=\\本站点\Sp-\\本站点\水箱液位;\\本站点\微分液位差=\\本站点\ek0+\\本站点\ek2-2*\\本站点\ek1;站点\ek0+\\本站点\Td*\\本站点\微分液位差)/500;\\本站点\水箱液位=\\本站点\水箱液位+\\本站点\Uk;\\本站点\液位传递值=\\本站点\ek1;\\本站点\ek1=\\本站点\ek0;\\本站点\ek2=\\本站点\液位传递值;\\本站点\储水箱液位=300-\\本站点\水箱液位;}if(\\本站点\电机==1 &&\\本站点\开关==1){\\本站点\ek0=\\本站点\Sp-\\本站点\水箱液位;\\本站点\微分液位差=\\本站点\ek0+\\本站点\ek2-2*\\本站点\ek1;\\本站点\Uk=(\\本站点\Ti*(\\本站点\ek0-\\本站点\ek1)+\\本站点\Kp*\\本站点\ek0+\\本站点\Td*\\本站点\微分液位差)/500+\\本站点\水流;\\本站点\水箱液位=\\本站点\水箱液位+\\本站点\Uk-\\本站点\水流;\\本站点\液位传递值=\\本站点\ek1;\\本站点\ek1=\\本站点\ek0;\\本站点\ek2=\\本站点\液位传递值;\\本站点\水流=\\本站点\水箱液位/100;\\本站点\储水箱液位=300-\\本站点\水箱液位;}if(\\本站点\电机==0 &&\\本站点\开关==1){\\本站点\水流=\\本站点\水箱液位/100;\\本站点\水箱液位=\\本站点\水箱液位-\\本站点\水流;\\本站点\储水箱液位=300-\\本站点\水箱液位;if(\\本站点\水箱液位<1)\\本站点\水流=0;}}if(\\本站点\开关转换==0){if(\\本站点\电机==1 &&\\本站点\开关==0){\\本站点\ek0=\\本站点\Sp-\\本站点\水箱液位;\\本站点\微分液位差=\\本站点\ek0+\\本站点\ek2-2*\\本站点\ek1;站点\ek0+\\本站点\Td*\\本站点\微分液位差)/500;\\本站点\水箱液位=\\本站点\水箱液位+\\本站点\Uk;\\本站点\液位传递值=\\本站点\ek1;\\本站点\ek1=\\本站点\ek0;\\本站点\ek2=\\本站点\液位传递值;\\本站点\储水箱液位=300-\\本站点\水箱液位;}if(\\本站点\电机==1 &&\\本站点\开关==1){\\本站点\ek0=\\本站点\Sp-\\本站点\水箱液位;\\本站点\微分液位差=\\本站点\ek0+\\本站点\ek2-2*\\本站点\ek1;\\本站点\Uk=(\\本站点\Ti*(\\本站点\ek0-\\本站点\ek1)+\\本站点\Kp*\\本站点\ek0+\\本站点\Td*\\本站点\微分液位差)/500+\\本站点\水流;\\本站点\水箱液位=\\本站点\水箱液位+\\本站点\Uk-\\本站点\水流;\\本站点\液位传递值=\\本站点\ek1;\\本站点\ek1=\\本站点\ek0;\\本站点\ek2=\\本站点\液位传递值;\\本站点\水流=\\本站点\水箱液位/100;\\本站点\储水箱液位=300-\\本站点\水箱液位;}if(\\本站点\电机==0 &&\\本站点\开关==1){\\本站点\水流=\\本站点\水箱液位/100;\\本站点\水箱液位=\\本站点\水箱液位-\\本站点\水流;\\本站点\储水箱液位=300-\\本站点\水箱液位;if(\\本站点\水箱液位<1)\\本站点\水流=0;}}if(\\本站点\Uk<=1)\\本站点\uk=\\本站点\Uk*100;else\\本站点\uk=100;if(\\本站点\电机==0)\\本站点\Uk=0;if(\\本站点\水箱液位>\\本站点\Sp)\\本站点\水箱液位=\\本站点\水箱液位-\\本站点\水流;4.5 动画连接(1)自动控制(2)手动控制(3)实时曲线(4)历史曲线总结通过此次设计,我掌握了流量单回路控制系统的构成。