位移传感器的安装方法
拉绳位移传感器使用方法
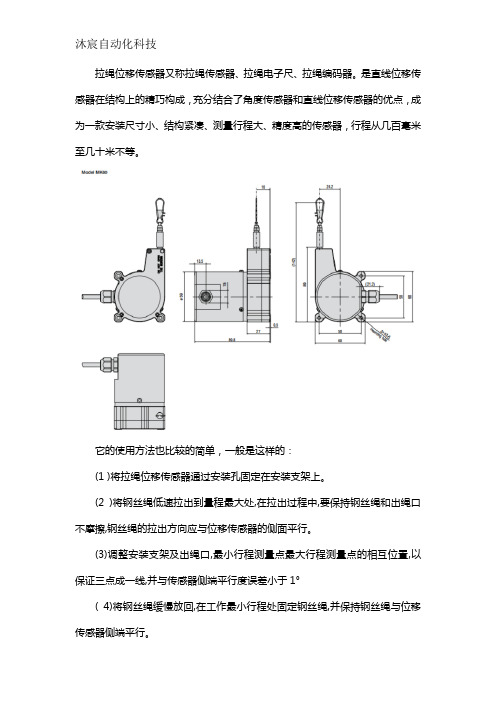
拉绳位移传感器又称拉绳传感器、拉绳电子尺、拉绳编码器。
是直线位移传感器在结构上的精巧构成,充分结合了角度传感器和直线位移传感器的优点,成为一款安装尺寸小、结构紧凑、测量行程大、精度高的传感器,行程从几百毫米至几十米不等。
它的使用方法也比较的简单,一般是这样的:
(1 )将拉绳位移传感器通过安装孔固定在安装支架上。
(2 )将钢丝绳低速拉出到量程最大处,在拉出过程中,要保持钢丝绳和出绳口不摩擦,钢丝绳的拉出方向应与位移传感器的侧面平行。
(3)调整安装支架及出绳口,最小行程测量点最大行程测量点的相互位置,以保证三点成一线,并与传感器侧端平行度误差小于1°
( 4)将钢丝绳缓慢放回,在工作最小行程处固定钢丝绳,并保持钢丝绳与位移传感器侧端平行。
(5)如果在工作最大行程处固定钢丝绳掉头,应将钢丝绳拉出至最大行程处,在出绳口用用工具夹紧钢丝绳,再固定钢丝绳头。
需要注意的是:
①安装拉绳位移传感器时,应根据被测点的运动轨迹,使拉线头拉出的钢绳尽量与传感器出口端面保持垂直。
②请确认在电源关闭的状态下进行接线,注意错误接线可能会损坏传感器。
③传感器拉线头的拉出量应在其有效长度范围内工作,避免拉出到极限,使钢绳受力过大遭受损伤。
④严禁松动传感器上的螺钉,转动固紧环位置。
⑤钢丝绳为不锈钢材料,在室外使用时,可定期上油。
这时大家如还有不清楚的或者是想购买拉绳位移传感器,可咨询郑州沐宸自
动化科技有限公司的工作人员进行了解。
我们目前已涵盖的传感器类别有力传感器、多维力传感器、扭矩传感器、位移传感器、压力传感器、加速度传感器、液位传感器等,同时可根据客户的需求,定制各类传感器,值得大家的选择。
机器人末端位移传感器的安装位置标定方法

机器人末端位移传感器的安装位置标定方法袁康正;朱伟东;陈磊;薛雷;戚文刚【摘要】针对机器人末端激光位移传感器位置的标定问题,基于平面和球面模板拟合的标定模型,设计一种同时标定位移传感器方向和位置参数的标定方法.以机器人离线编程与机器人运动学仿真为基础,对2种标定算法进行系统的仿真对比实验.分析影响2种标定模板标定精度的影响因素,如传感器测量误差、测量长度以及标定参数数量.引入可观测指数来评价机器人运动空间中测量姿态的标定效率.通过优化算法计算得出一组近似最优测量姿态以及最佳评价指数,减少非建模误差以及测量误差对标定结果的影响,有效地提高算法的抵抗噪声能力、标定精度以及标定效率.实验结果表明,使用该标定方法标定后的位置参数标准差为0.37 mm,方向参数标准差为0.35°.【期刊名称】《浙江大学学报(工学版)》【年(卷),期】2015(049)005【总页数】6页(P829-834)【关键词】机器人TCP标定;激光位移传感器;最小二乘法;可观测指数【作者】袁康正;朱伟东;陈磊;薛雷;戚文刚【作者单位】浙江大学机械工程学系,浙江杭州310027;浙江大学机械工程学系,浙江杭州310027;上海飞机制造有限公司,上海200436;上海飞机制造有限公司,上海200436;上海飞机制造有限公司,上海200436【正文语种】中文【中图分类】TP242将激光位移传感器、激光扫描仪、照相机等非接触式测量设备安装于机器人末端法兰盘上,构成对环境具有一定感知功能的智能机器人是机器人的主要发展趋势[1].对于在法兰上装有传感器设备的机器人,传感器相对于法兰盘的位置和方向需要事先标定,这一过程称为机器人刀尖点标定(tool center point,TCP)[2].另外,随着机器人仿真和离线编程技术在工业中的应用日益增加[3],为了更加有效地使用机器人离线编程,需要进行准确的机器人标定和机器人TCP标定.国内外对机器人TCP标定问题的研究已经取得较大进展,但主要是用于解决机器人与工业相机、3D扫描仪之间的标定问题.Shiu等[4]通过四元代数法和线性最小二乘法来分步求解相机位姿的旋转矩阵和平移矩阵.Li等[5-6]以标准球作为标定对象,并通过机器人的平移运动和旋转运动分步求解扫描仪与机器人之间的旋转和平移矩阵.而针对机器人末端执行器夹持激光位移传感器的TCP标定问题,目前采取的方法主要是通过求解机器人在特定几何约束(点、线、面)下的闭环运动链方程[2].王胜华等[1]采用多次改变机器人位姿对同一点进行测量,利用运动学方程和最小二乘原理求出机器人末端坐标系与传感器坐标系之间的齐次变换矩阵.此标定方法很难保证每次测量点都在同一点上,且标定结果受实验环境、实验操作影响较大.吴聊等[7]采用基于平面模板的标定方法,在不同位姿下对平面进行测量,利用非线性最小二乘法拟合平面求解标定问题.该方法虽然能够快速标定出结果,但是参数分布对结果影响较大,因此标定精度受实验操作影响.Zhu等[8]提出了基于球面拟合的标定算法,标定精度较高.但该方法首先需要机器人视觉伺服控制系统辅助标定位移传感器方向参数,不具有通用性.Awei等[9]通过设计圆柱面和锥面复合标定对象,提出了一种串联坐标测量机标定以及TCP标定新算法.卢科青等[10]通过设计一种方向可调的标定面,在三坐标测量机平台上对点激光测头激光束方向进行了标定.这2种方法虽然能满足标定精度的要求,但标定过程往往需要将位移传感器的方向和位置参数分步标定,标定过程较为繁琐,而且需要复杂的标定对象或者精密的辅助测量设备,标定成本高.同时,在位移传感器标定过程中,机器人的测量姿态和测量条件对标定结果的影响很大,而国内外学者在姿态选择问题上研究较少,使得标定算法的移植性较差.为了实现TCP标定算法的快速性和通用性,本文在非线性最小二乘优化算法的基础上,建立了基于平面和球面拟合的标定理论模型,对位移传感器的方向和位置参数进行同时标定,简化了标定步骤.通过引入可观测指数和优化算法得出最优测量姿态以及最佳评价指数,提高了算法的抗干扰能力、标定精度和标定效率.1.1 平面标定模型激光位移传感器基于平面拟合标定算法的数学模型如图1所示.机器人底座base 坐标系为X w Y w Z w O w,法兰盘坐标系为X t Y t Z t O t,位移传感器参考点在法兰盘坐标系下坐标p(x 0,y 0,z 0)、方向固定板在机器人base坐标系下的平面方程为ax+by+cz+1=0(不考虑特殊情况),位移传感器参考点到测量点的距离为l.法兰盘坐标系X t Y t Z t O t与机器人base坐标系之间的变换矩阵 T 可由机器人正向运动模型得出.测量点在法兰坐标系X t Y t Z t O t下的坐标x可以表示为式中:x=[x,y,z]T,x 0=[x 0,y 0,z 0]T,n=[n x,n y,n z]T.测量点在机器人base坐标系下的坐标为p w(x w,y w,z w).由法兰盘和机器人base坐标系之间齐次变换关系可得由于测量点在固定板平面上,因此p w满足平面方程:联立方程(2)、(3)可得位移传感器测量点到平面的距离为操作机器人到不同的位姿进行测量,获取m组测量结果,可得d i=f i(x 0,y 0,z 0,α,β,a,b,c)(i=1,2,….,m),其中(cosα=n x,cosβ=n y).即可以通过非线性最小二乘法求解待标定参数,问题转化为求解如下最小二乘问题:1.2 球面标定模型与平面拟合标定模型相似,球面拟合标定模型如图2所示.测量点p w(x w,y w,z w)在已知半径R的固定球面上,满足空间球面方程:联立方程(2)、(6)可得到测量点到球心p c(x c,y c, z c)的距离为通过控制机器人使激光位移传感器在不同姿态下测量球面上m个点,可以得到m个形式如式(7)的等式.则位移传感器标定问题即为求解非线性最小二乘问题:针对建立的平面和球面标定模型,在三维设计软件CATIA中建立相应的三维模型并在拟合面上选取若干个离散测量点.通过离线编程前置处理软件提取测量点信息并导入到DELMIA软件中的离线编程模块进行机器人测量仿真,获取机器人法兰位姿矩阵 T以及测量长度l数据,仿真实验平台如图3所示.在测量值l上添加均匀分布噪声来近似模拟机器人运动误差、传感器测量误差、拟合面误差等因素对测量值的影响.最后,非线性最小二乘问题可通过数值分析软件MATLAB中Levenberg-Marquardt算法求解[11].2.1 2种标定算法标定结果对比分别在l上添加随机测量误差±Δε,对2种标定算法进行多次优化实验.2种标定算法标定的传感器参考点位置绝对误差Δd和激光束方向角度绝对误差Δθ与Δε的关系如图4(a)和(b)所示.在Δε=±0.2 mm的噪声等级下,分别对平面和球面标定算法随机进行2 000次优化计算,位置绝对误差Δd和方向角度绝对误差Δθ的直方图如图5所示,其中f为频率数.从仿真结果图4和5可知,球面算法与平面算法相比,球面算法的标定精度高、收敛性好,且误差越大效果越明显.2.2 参数影响仿真分析测量长度:针对球面标定算法,分析了位移传感器测量值分布情况对标定结果的影响.在传感器测量位置、方向相同,噪声大小相同,测量长度l均值¯l分别为20、40、60、80、100 mm条件下进行优化计算.5种情况下的标定结果如图6所示.标定参数个数:针对球面标定算法,位移传感器需标定的参数个数n对位置标定精度影响较大.在所有参数都未知的情况下,此时标定参数个数n=8(传感器位置、方向、球心位置).若球心在机器人base下坐标已知,则需要标定参数个数n=5.若传感器方向参数事先通过其他方法标定,此时需要标定参数个数n=6.在不同标定参数个数下,球面算法的位置标定误差和噪声误差的关系如图7所示.2.3 姿态仿真优化针对图2球面标定理论模型,可得式中:ω为待标定参数(x,y,z,α,β,x c,y c,z c),ε为传感器测量误差、机器人运动误差等引起的测量点到球心距离误差.将上式对 T进行微分可得式中:ΔF为函数误差,J为雅克比辨识矩阵,ΔT为机器人姿态矩阵误差,对J进行奇异值分解可得式中:U、V为正交矩阵,Σ为对角矩阵,对角元素为σi(i=1,…,m),其中σ1≥σ2…≥σm≥0.可观测指数[12]基于雅克比辨识矩阵的奇异值分解,量化在特定位姿下参数辨识的可观测性.指数数值越大,则位置误差对于参数误差的贡献越大,即未建模误差和测量误差的影响越小[13].5种可观测指数定义如下:最优姿态优化算法流程如下:1)在机器人测量运动空间内随机选取足够多的N组测量姿态作为候选姿态.2)在候选姿态中选取n(n<N)组姿态作为初始标定姿态集合,用Ω表示.3)从余下的(N-n)组候选姿态中,选取一个姿态ξ+增加到Ω,使得增加后的标定姿态Ω+1的可观测指数与Ω相比增加最大.4)从Ω+1中去掉一个姿态ξ-,使得去掉后的标定姿态Ω可观测指数减小最少.5)重复步骤3和4直到ξ+与ξ-相等.由仿真模型获取N=2 000组候选姿态,分别应用5种可观测指数对候选姿态进行优化计算.5种可观测指数优化前后对比如图8所示.2.4 仿真结论由仿真实验结果可以得出以下结论:球面标定算法比平面算法收敛性好,且标定精度高.在实验条件允许情况下,方向参数通过辅助设备单独标定,能够有效地提高球面算法的标定精度,而球心坐标参数在已知的情况下对传感器位置标定精度的提高不大.在测量姿态相同的情况下,传感器的测距越小位置参数标定精度越高.5种可观测指数优化姿态在一定程度上均能提高球面标定算法的稳定性和精度,其中O 5指数优化效果最好.为了检验球面标定算法的有效性,进行了基于球面拟合的位移传感器标定实验,实验平台如图9所示.实验中采用KUKA KR360-2型号六自由度机器人,重复定位精度±0.08 mm.机器人法兰末端执行器上安装由Baumer公司生产的ch-8501型号激光位移传感器,最大测距120 mm,分辨率0.01 mm,线性误差0.08 mm.固定的标定球采用直径为30 mm的标准球,其球面圆度0.08μm.通过改变机器人姿态使激光位移传感器对标定球面进行30次测量,并记录相关数据.将待标定参数的粗略测量值作为迭代计算的初始值,通过Matlab优化工具箱中lsqnonlin函数,求解球面标定模型中的非线性最小二乘问题.采用球面算法求解参数的优化结果如表1所示.位移传感器位置参数标准差为0.37 mm,接近传统视觉测量方法标定精度(标准差为0.2 mm)[8].本文详细分析了基于平面和球面拟合的位移传感器标定理论模型,并通过仿真分析对比得出球面模板方法在收敛性和标定精度上要优于平面模板方法.为了避免使用额外的附加测量设备,本文同时标定位移传感器方向和位置参数,简化了标定流程.为了减小传感器测量误差和测量姿态对球面标定算法的精度、稳定性和标定效率的影响,本文引入了可观测指数对标定姿态进行评价,进而获得最优姿态.实验结果显示,采用本文的标定方法,激光位移传感器的标定结果位置参数最大标准差为0.37 mm,方向参数最大标准差0.35°,接近传统视觉测量方法标定精度.【相关文献】[1]王胜华,都东,张文增,等.机器人定点变位姿手-眼标定方法[J].清华大学学报:自然科学版,2007,47(2):165-168.WANG Sheng-hua,DU Dong,ZHANG Wen-zeng,et al.Hand-eye calibration for the robot by measuring a fixed point from different poses[J].Journal of Tsinghua University:Science and Technology,2007,47(2):165-168.[2]GAN Z,TANG Q.Visual sensing and its applications: integration of laser sensors to industrial robots[M].Hangzhou:Zhejiang University Press,2011.[3]MITSI S,BOUZAKIS K D,MANSOUR G,et al.Offline programming of an industrial robot for manufacturing[J].The International Journal of Advanced Manufacturing Technology,2005,26(3):262-267.[4]SHIU Y C,AHMAD S.Calibration of wrist-mounted robotic sensors by solving homogeneous transform equations of the form AX=XB[J].Robotics and Automation,IEEE Transactions on,1989,5(1):16-29.[5]LI J,ZHU J,DUAN K,et al.Calibration of a portable laser 3-D scanner used by a robot and its use in measurement[J].Optical Engineering,2008,47(1):017202-017202-8. [6]REN Y J,YIN S B,ZHU J G.Calibration technology in application of robot-laser scanning system[J].Optical Engineering,2012,51(11):114204-114204.[7]吴聊,杨向东,蓝善清,等.基于平面模板的机器人TCF标定[J].机器人,2012,34(1):98-103.WU Liao,YANG Xiang-dong,LAN Shan-qing,et al.Robotic TCF calibration based on a planar template[J].Robot,2012,34(1):98-103.[8]ZHU Z,TANG Q,LI J,et al.Calibration of laser displacement sensor used by industrial robots[J].Optical Engineering,2004,43(1):12-13.[9]ZHOU A,GUO J,SHAO W,et al.A segmental calibration method for a miniature serial-link coordinate measuring machine using a compound calibration artefact[J].Measurement Science and Technology,2013,24(6):065001.[10]卢科青,王文,陈子辰.点激光测头激光束方向标定[J].光学精密工程,2010,18(4):880-886.LU Ke-qing,WANG Wen,CHEN Zi-chen.Calibration of laser beam-direction for point laser sensors[J].Optics and Precision Engineering,2010,18(4):880-886.[11]陈淑铭,乔田田.一个求解非线性最小二乘问题的新方法[J].烟台大学学报:自然科学与工程版,2004,01:14 -22.CHEN Shu-ming,QIAO Tian-tian.A new method of solving problem of nonlinear least square[J].Journal of Yantai University:Natural Science and Engineering Edition,2004,17(1):14-22.[12]SUN Y,HOLLERBACH J M.Observability index selection for robot calibration[C]//IEEE International Conference on Robotics and Automation.Pasadena:IEEE,2008:831-836.[13]JOUBAIR A,BONEV I parison of the efficiency of five observability indices for robot calibration[J].Mechanism and Machine Theory,2013,70:254-265.。
WYDC位移传感器
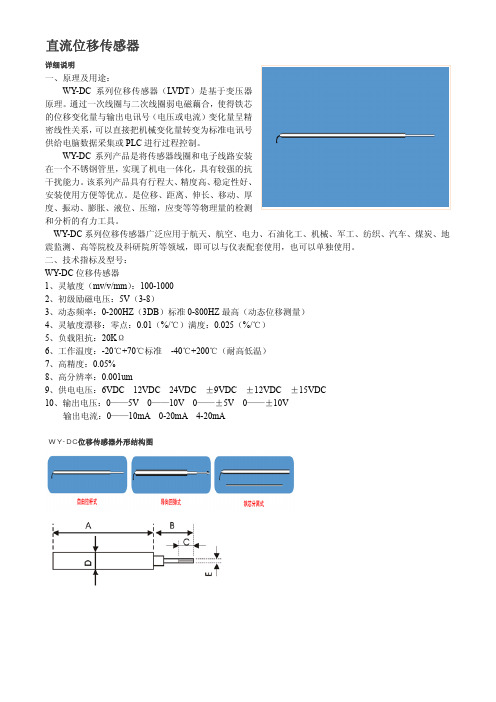
直流位移传感器详细说明一、原理及用途:WY-DC 系列位移传感器(LVDT)是基于变压器原理。
通过一次线圈与二次线圈弱电磁藕合,使得铁芯的位移变化量与输出电讯号(电压或电流)变化量呈精密线性关系,可以直接把机械变化量转变为标准电讯号供给电脑数据采集或PLC进行过程控制。
WY-DC系列产品是将传感器线圈和电子线路安装在一个不锈钢管里,实现了机电一体化,具有较强的抗干扰能力。
该系列产品具有行程大、精度高、稳定性好、安装使用方便等优点。
是位移、距离、伸长、移动、厚度、振动、膨胀、液位、压缩,应变等等物理量的检测和分析的有力工具。
WY-DC系列位移传感器广泛应用于航天、航空、电力、石油化工、机械、军工、纺织、汽车、煤炭、地震监测、高等院校及科研院所等领域,即可以与仪表配套使用,也可以单独使用。
二、技术指标及型号:WY-DC位移传感器1、灵敏度(mv/v/mm):100-10002、初级励磁电压:5V(3-8)3、动态频率:0-200HZ(3DB)标准0-800HZ最高(动态位移测量)4、灵敏度漂移:零点:0.01(%/℃)满度:0.025(%/℃)5、负载阻抗:20KΩ6、工作温度:-20℃+70℃标准-40℃+200℃(耐高低温)7、高精度:0.05%8、高分辨率:0.001um9、供电电压:6VDC 12VDC 24VDC ±9VDC ±12VDC ±15VDC10、输出电压:0——5V 0——10V 0——±5V 0——±10V输出电流:0——10mA 0-20mA 4-20mAWY-DC位移传感器外形结构图B(mm)型号量程(mm)精度A(mm)C(mm)D(mm)E(mm)最小最大WYDC-1L、WYDC-0.5D1、±0.50.5%0.2%0.1%0.05%49305415ф20M4 M5 回弹WYDC-2L、WYDC-1D2、±10.5%0.2%0.1%0.05%49305415ф20M4 M5 回弹WYDC-5L、WYDC-2.5D5、±2.50.5%0.2%0.1%0.05%71308015ф20M4 M5 回弹WYDC-10L、WYDC-5D10、±50.5%0.2%0.1%0.05%71308015ф20M4 M5 回弹WYDC-20L、WYDC-10D20、±100.5%0.2%0.1%0.05%71309515ф20M4 M5 回弹WYDC-30L、WYDC-15D30、±150.5%0.2%0.1%0.05%91309515ф20M4 M5 回弹WYDC-40L、WYDC-20D40、±200.5%0.2%0.1%0.05%1093011115ф20M4 M5 回弹WYDC-50L、WYDC-25D50、±250.5%0.2%0.1%0.05%1093015515ф20M4 M5 回弹WYDC-100L、WYDC-50D100、±500.5%0.2%0.1%1693020515ф20M4 M5 回弹WYDC-150L、WYDC-75D150、±750.5%0.2%0.1%2724026515ф20M4 M5 回弹WYDC-200L、WYDC-100D200、±1000.5%0.2%0.1%3004032115ф20M4 M5 回弹WYDC-300L、WYDC-150D300、±1500.5%0.2%0.1%4894048515ф20M5 WYDC-400L、WYDC-200D400、±2000.5%0.2%0.1%5684064415ф20M5 WYDC-500L、WYDC-250D500、±2500.5%0.2%0.1%6885074915ф20M5 WYDC-600L、WYDC-300D600、±3001%0.5%0.2%9085074915ф20M5 WYDC-700L、WYDC-350D700、±3501%0.5%0.2%9505079120ф20M5 WYDC-800L、WYDC-400D800、±4001%0.5%0.2%10145084520ф20M5 WYDC-900L、WYDC-450D900、±4501%0.5%0.2%116350100420ф20M6 WYDC-1000L、WYDC-500D1000、±5001%0.5%0.2%124750108820ф20M6 WYDC-1200L、WYDC-600D1200、±6001%0.5%0.2%145150129220ф20M6 WYDC-1500L、WYDC-750D1500、±7501%0.5%0.2%179050163120ф20M6 WYDC-2000L、WYDC-1000D2000、±10001%0.5%0.2%225150209220ф20M6注:L为单向,D为双向,如需不同型号和尺寸的传感器可订制作三、安装及使用方法:拉杆式位移传感器可以水平安装,也可垂直安装,首先将传感器壳体放在参照物(基准)的安装支架孔里,使传感器拉杆和被测物移动的方向保持一致,根据传感器的量程,估算大致的间隙,然后用镙母将拉杆和被测物固定起来,通上电源等传感器稳定下来,再慢慢的移动传感器壳体,使传感器的输出零位对应于被测物机械零位,然后将传感器壳体夹紧(不可松动),安装好就可以通过计算机数据采集对被测验物的位移进行检测或监测或PLC进行系统控制,回弹式位移传感器和拉杆式位移传感器安装基本相似。
霍尔位移传感实验报告
一、实验目的1. 理解霍尔位移传感器的工作原理。
2. 掌握霍尔位移传感器的安装和调试方法。
3. 分析霍尔位移传感器的性能特点。
4. 验证霍尔位移传感器的测量精度和稳定性。
二、实验原理霍尔位移传感器是基于霍尔效应原理设计的。
当电流通过半导体材料,并受到垂直于电流方向的磁场作用时,在半导体材料的两侧会产生电压,这个电压称为霍尔电压。
霍尔电压的大小与磁感应强度、电流强度和半导体材料的厚度有关。
霍尔位移传感器通常由一个线性霍尔元件、永久磁钢组和测量电路组成。
当传感器沿轴向移动时,由于磁场分布的变化,霍尔元件的输出电压也随之变化,从而实现位移的测量。
三、实验仪器与设备1. 霍尔位移传感器2. 永久磁钢组3. 信号调理电路4. 数据采集器5. 移动平台6. 精密尺四、实验步骤1. 将霍尔位移传感器安装在移动平台上,确保传感器轴线与移动平台轴线一致。
2. 将传感器连接到信号调理电路,并进行电路调试,确保信号输出稳定。
3. 使用数据采集器记录传感器在不同位移位置下的输出电压。
4. 将实验数据与理论计算结果进行对比分析。
5. 改变传感器轴线与磁场方向的夹角,观察霍尔电压的变化,分析传感器的性能特点。
五、实验数据与结果分析1. 实验数据记录表| 位移(mm) | 霍尔电压(mV) | 理论计算值(mV) ||------------|----------------|------------------|| 0 | 0 | 0 || 1 | 0.5 | 0.5 || 2 | 1.0 | 1.0 || 3 | 1.5 | 1.5 || 4 | 2.0 | 2.0 |2. 实验结果分析(1)实验数据与理论计算值基本一致,说明霍尔位移传感器的测量精度较高。
(2)当传感器轴线与磁场方向的夹角为90°时,霍尔电压最大;当夹角为0°时,霍尔电压最小。
这表明霍尔位移传感器的输出电压与传感器轴线与磁场方向的夹角有关。
位移传感器的结构和安装方法
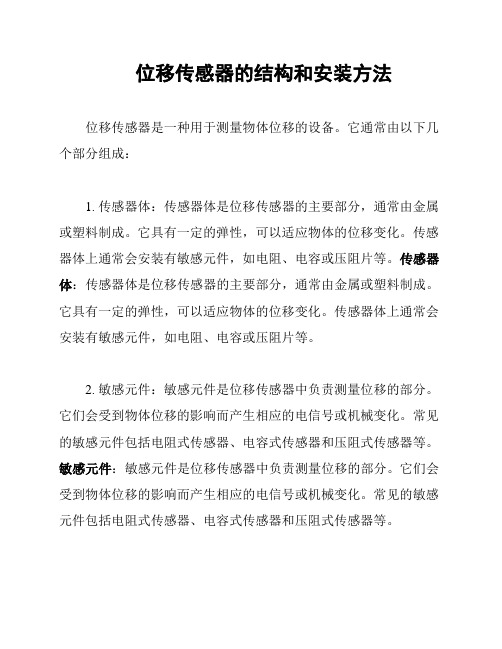
位移传感器的结构和安装方法位移传感器是一种用于测量物体位移的设备。
它通常由以下几个部分组成:1. 传感器体:传感器体是位移传感器的主要部分,通常由金属或塑料制成。
它具有一定的弹性,可以适应物体的位移变化。
传感器体上通常会安装有敏感元件,如电阻、电容或压阻片等。
传感器体:传感器体是位移传感器的主要部分,通常由金属或塑料制成。
它具有一定的弹性,可以适应物体的位移变化。
传感器体上通常会安装有敏感元件,如电阻、电容或压阻片等。
2. 敏感元件:敏感元件是位移传感器中负责测量位移的部分。
它们会受到物体位移的影响而产生相应的电信号或机械变化。
常见的敏感元件包括电阻式传感器、电容式传感器和压阻式传感器等。
敏感元件:敏感元件是位移传感器中负责测量位移的部分。
它们会受到物体位移的影响而产生相应的电信号或机械变化。
常见的敏感元件包括电阻式传感器、电容式传感器和压阻式传感器等。
3. 信号处理电路:信号处理电路是位移传感器中将敏感元件输出信号进行处理的部分。
它可以将敏感元件输出的电信号转换为数字信号或模拟信号,以便进行后续的数据处理或控制。
信号处理电路:信号处理电路是位移传感器中将敏感元件输出信号进行处理的部分。
它可以将敏感元件输出的电信号转换为数字信号或模拟信号,以便进行后续的数据处理或控制。
位移传感器的安装方法可以根据具体的应用需求来选择。
以下是一些常见的安装方法:1. 固定安装:将位移传感器直接固定在需要测量位移的物体上。
这种安装方法适用于需要测量物体整体位移的情况,如机械臂、汽车悬挂系统等。
固定安装:将位移传感器直接固定在需要测量位移的物体上。
这种安装方法适用于需要测量物体整体位移的情况,如机械臂、汽车悬挂系统等。
2. 引导安装:在位移传感器和被测物体之间使用引导装置,如导轨或传动装置。
通过引导装置的作用,位移传感器可以跟随被测物体的位移变化,从而实现准确的位移测量。
引导安装:在位移传感器和被测物体之间使用引导装置,如导轨或传动装置。
位移传感器安装使用说明及注意事项
位移传感器安装使用说明及注意事项位移传感器是一种用于测量物体位置变化的装置,广泛应用于机械设备、自动化系统和工程测量等领域。
在安装和使用位移传感器时,有一些重要的注意事项需要遵守,以确保精确的测量和设备的正常运行。
下面是位移传感器的安装使用说明及注意事项:1.安装位置的选择:-与要测量的物体位置一致,以确保测得准确的位移值;-避免外部干扰,如振动、冲击等;-不受高温、低温、湿度等环境因素的影响;-方便安装和维护。
2.安装步骤:-清洁安装位置:安装位置应清洁无尘,避免灰尘和杂物进入传感器。
-固定传感器:使用合适的固定方式将传感器牢固地固定在安装位置上,避免松动或移位。
-连接电缆:将传感器的接线端子与测量系统的接口连接,确保接触良好。
-调整传感器:根据实际需要,调整传感器的工作范围和增益,使其适应要测量的位移范围。
3.注意事项:-避免过量应力:在安装传感器时,避免施加过大的力量,以免损坏传感器或测量物体。
-防止振动和冲击:位移传感器对振动和冲击非常敏感,因此应注意避免安装在振动和冲击较大的位置上。
-避免过温和低温:传感器通常有工作温度范围限制,应尽量避免超出该范围的温度环境。
-防护措施:按照传感器的防护等级要求,采取相应的防护措施,如防尘、防水等。
-定期校准:位移传感器在使用一段时间后可能出现漂移或误差,建议定期对传感器进行校准,以保证测量精度。
4.维护保养:-定期清洁:定期清洁传感器的表面和接线端子,避免灰尘、油污等物质积聚。
-固定检查:定期检查传感器的固定方式,确保其稳固可靠,并根据需要进行调整。
-良好保护:避免传感器受到机械撞击、弯曲、拉伸等损坏,减少意外事故的发生。
总之,位移传感器的安装和使用需要仔细操作,并注意以上的注意事项,以确保传感器正常运行和精确测量物体的位移变化。
在实际应用过程中,还应根据具体设备和使用要求,遵循制造商提供的安装和使用说明。
位移传感器的工作原理

位移传感器的工作原理概述:位移传感器是一种用于测量物体位移的装置,广泛应用于工业自动化、机械制造、航空航天等领域。
它能够将物体的位移转化为电信号输出,以实现对位移的准确测量和控制。
本文将详细介绍位移传感器的工作原理及其应用。
一、工作原理:位移传感器的工作原理基于物理量的变化与电信号的转换。
常见的位移传感器有电阻式、电容式、电感式、光电式等多种类型,下面以电阻式位移传感器为例来介绍其工作原理。
1. 电阻式位移传感器:电阻式位移传感器是利用电阻值随着物体位移的变化而发生变化的原理来测量位移的。
它通常由电阻元件和测量电路组成。
(1)电阻元件:电阻元件是位移传感器的核心部分,它通常采用导电材料制成,如碳膜电阻、金属薄膜电阻等。
电阻元件的形状可以是线性的,也可以是非线性的,根据不同的应用需求选择不同的电阻元件。
(2)测量电路:测量电路用于测量电阻元件的电阻值,并将其转化为电信号输出。
常见的测量电路有电压分压法、电流源法等。
其中,电压分压法是最常用的方法,它通过在电阻元件两端加上一个恒定电流,测量电阻元件两端的电压来计算电阻值。
2. 工作过程:电阻式位移传感器的工作过程如下:(1)传感器安装:将位移传感器固定在需要测量位移的物体上,使其能够随着物体的位移而发生相应的变化。
(2)位移测量:当物体发生位移时,位移传感器内部的电阻元件也会随之发生变化。
通过测量电路,可以将电阻元件的变化转化为电信号输出。
(3)信号处理:位移传感器输出的电信号通常需要进行进一步的处理,以满足实际应用的需求。
常见的信号处理方法有放大、滤波、线性化等。
(4)数据显示与控制:经过信号处理后,位移传感器的输出结果可以通过显示装置进行实时显示,也可以通过控制装置进行自动控制。
二、应用领域:位移传感器广泛应用于各个领域,以下列举几个常见的应用领域:1. 工业自动化:位移传感器在工业自动化领域中用于测量机器人的位置、运动轨迹等信息,以实现精准控制和操作。
BGK-4450型振弦式多点位移计传感器安装使用手册(REV.B)
传感器不能转动。 5. 继续拉动传感器, 直到在读数仪上获得所需读数(调节量参见表 1,实际应用以现场
要求确定)。 6. 紧固传基座上的传感器固定锚,同时注意传感器不被转动。 变化量 5,000 最小读数 2000 2000 最大读数 8500 8500 中间范围 5500 5500 1/3 压缩量 1/3 拉伸量 1/3 拉伸量 1/3 压缩量 6500 6500 4000 4000
BGK-4450 型多点位移计传感器
安装使用手册
(REV.A)
基康仪器(北京)有限公司版权所有 Copyright ©2010
本仪器的安装、维护、操作都要由专业技术人员进行。基康仪器(北京)有限公司对产品有更改的权利,产品 更改信息恕不另行通知。 本文件所含信息归基康仪器(北京)有限公司所有。本文件中所有信息、数据、设计、以及所含图样都属基康 仪器(北京)有限公司所有,未经基康仪器(北京)有限公司书面许可,不得以任何形式(包括影印或其他任何方 式)翻印或复制、间接或直接透露给外界团体。
图 1-4450 位移传感器示意图 注意:不可转动位移传感器的滑动杆,这可能导致传感器的永久损坏!滑动杆上的定 位销与外同上的定位槽则起调整定位的作用。
2.安装调试 2.1初步测试
收到该仪器后,即应用测量仪表(如 BGK-408)对传感器作适当地检查。滑动杆出厂时 通常以被拉出大约 50%量程的位置定位(见图 1) ,原因是传感器的钢弦在保持一定张力的 情况下,可减少在运输途中造成的损坏。把传感器连接到读数议上,读数应该是稳定的,其 频率模数大约在 4000~5000 字范围内。当去掉尼龙扣或半圆保护管后,滑动杆会弹回外筒 内,此时读数应该是 2000~3000 之间。注意,通常在定位销落入定位槽时,往往不能获取 读数或读数不稳定,此时只要将滑动杆拉出 2~3mm 后即可得到正确读数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
位移传感器的功能是将机械的位移量转换成电信号,在我们选择位移传感器的时候需要考虑的有安装方式线性精度和供电情况,同样需要知道你的大概测量范围去选择更加合适的位移传感器。
首先我们在选择位移传感器规格范围时需留有余量,一般情况下最好是在实际行程的基础上选大一规格的即可。
同样还需要注意的是你选择的是电涡流位移传感器,拉线位移传感器还是滑块位移传感器。
如果你的位移传感器不便于进行对中调整的场合使用的话,最好是使用滑块位移传感器。
而就位移的量程而言,大量程的建议使用的拉线位移传感器,电涡流位移传感器只是相对精度比较高的去测量。
滑块位移传感器可以减少调整对中性的工作量,但辅助加长杆不能取消,否则,会出现由于对中性不好而导致稳定性和使用寿命,所以类似的位移传感器安装要是相当严格的。
位移传感器的安装要求根据你测量的是振动和位移,如果是轴的径向振动测量就得要求轴的直径大于探头直径的三倍以上。
每个测点应同时安装两个传感器探头,两个探头应分别安装在轴承两边的同一平面上相隔90度。
轴的径向振动测量时探头的安装位置应该尽量靠近轴承。
探头中心线应与轴心线正交,探头监测的表面必须是无裂痕或其它任何不连续的表面现象。
如果是轴的轴向位移测量测量面应该与轴是一个整体,这个测量面是以探头的中心线为中心,宽度为1.5倍的探头圆环。
探头安装距离距止推法兰盘不应超过305mm,否则测量结果不仅包含轴向位移的变化,而且包含胀差在内的变化,这样测量的不是轴的真实位移值。
对于位移传感器的测量方式不一样,对应的安装就需要有不一样的要求。
艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。
如需进一步了解相关传感器产品的选型,报价,采购,参数,图片,批发等信息,请关注艾驰商城。