数字图像处理复习试卷(照片整理)
数字图像期末考试试题

数字图像期末考试试题# 数字图像处理期末考试试题## 一、选择题(每题2分,共20分)1. 在数字图像处理中,灰度化处理通常使用以下哪种方法?A. 直接取RGB三个通道的平均值B. 只取红色通道C. 只取绿色通道D. 只取蓝色通道2. 边缘检测是图像处理中的一个重要步骤,以下哪个算法不是边缘检测算法?A. Sobel算子B. Canny算子C. Laplacian算子D. Gaussian模糊3. 在图像增强中,直方图均衡化的目的是什么?A. 增加图像的对比度B. 减少图像的噪声C. 改善图像的色彩D. 锐化图像的边缘4. 以下哪个是图像滤波中常用的高通滤波器?A. 高斯滤波器B. 均值滤波器C. Laplacian滤波器D. 中值滤波器5. 在图像分割中,阈值分割法是基于什么原理?A. 图像的纹理特征B. 图像的灰度分布C. 图像的颜色分布D. 图像的几何形状## 二、简答题(每题10分,共30分)1. 简述数字图像的基本属性及其在图像处理中的重要性。
2. 描述图像锐化的基本步骤,并解释为什么锐化可以提高图像的可读性。
3. 解释什么是图像的傅里叶变换,并简述其在图像处理中的应用。
## 三、计算题(每题25分,共50分)1. 给定一个大小为 \( 256 \times 256 \) 的灰度图像,其像素值范围从0到255。
计算该图像的直方图,并说明如何根据直方图进行图像的对比度增强。
2. 假设有一个图像,其尺寸为 \( 100 \times 100 \) 像素,且每个像素的灰度值为 \( g(x, y) \)。
请写出使用高斯滤波器对图像进行平滑处理的公式,并描述其对图像噪声的影响。
## 四、综合应用题(共30分)1. 描述如何使用Canny边缘检测算法进行图像边缘的提取,并解释其算法的步骤和原理。
2. 给出一个实际应用场景,说明如何利用图像分割技术来解决该场景中的问题。
## 五、论述题(共30分)1. 论述数字图像处理在医学成像领域的应用,并讨论其对提高诊断准确性的潜在影响。
(完整版)数字图像处理试题集复习题

(完整版)数字图像处理试题集复习题⼀.填空题1. 数字图像是⽤⼀个数字阵列来表⽰的图像。
数字阵列中的每个数字,表⽰数字图像的⼀个最⼩单位,称为像素。
2. 数字图像处理可以理解为两个⽅⾯的操作:⼀是从图像到图像的处理,如图像增强等;⼆是从图像到⾮图像的⼀种表⽰,如图像测量等。
3. 图像可以分为物理图像和虚拟图像两种。
其中,采⽤数学的⽅法,将由概念形成的物体进⾏表⽰的图像是虚拟图像。
4. 数字图像处理包含很多⽅⾯的研究内容。
其中,图像重建的⽬的是根据⼆维平⾯图像数据构造出三维物体的图像。
5、量化可以分为均匀量化和⾮均匀量化两⼤类。
6. 图像因其表现⽅式的不同,可以分为连续图像和数字离散图像两⼤类。
5. 对应于不同的场景内容,⼀般数字图像可以分为⼆值图像、灰度图像和彩⾊图像三类。
8. 采样频率是指⼀秒钟内的采样次数。
10. 采样所获得的图像总像素的多少,通常称为图像分辨率。
11. 所谓动态范围调整,就是利⽤动态范围对⼈类视觉的影响的特性,将动态范围进⾏压缩,将所关⼼部分的灰度级的变化范围扩⼤,由此达到改善画⾯效果的⽬的。
12 动态范围调整分为线性动态范围调整和⾮线性动态范围调整两种。
13. 直⽅图均衡化的基本思想是:对图像中像素个数多的灰度值进⾏展宽,⽽对像素个数少的灰度值进⾏归并,从⽽达到清晰图像的⽬的。
14. 数字图像处理包含很多⽅⾯的研究内容。
其中,图像增强的⽬的是将⼀幅图像中有⽤的信息进⾏增强,同时将⽆⽤的信息进⾏抑制,提⾼图像的可观察性。
15. 我们将照相机拍摄到的某个瞬间场景中的亮度变化范围,即⼀幅图像中所描述的从最暗到最亮的变化范围称为动态范围。
16. 灰级窗,是只将灰度值落在⼀定范围内的⽬标进⾏对⽐度增强,就好像开窗观察只落在视野内的⽬标内容⼀样。
17. 图像的基本位置变换包括了图像的平移、镜像及旋转。
18. 最基本的图像形状变换包括了图像的放⼤、缩⼩和错切。
19. 图像经过平移处理后,图像的内容不发⽣变化。
数字图像处理复习试题
数字图像处理复习试题⼀、判断题1. 灰度直⽅图既能反映⼀幅图像各灰度级像素占图像的⾯积⽐,⼜能包含图像各像素之间的空间位置信息。
( )2.数字图像是由模拟图像经采样之后就可以得到的图像。
( )3.灰度直⽅图既能反映⼀幅图像各灰度级像素占图像的⾯积⽐,但不包含图像各像素之间的空间位置信息。
( )4. 图像的⼆值化是⼀种图像的局部运算。
( )5.⼀幅640×480分辨率的图像,表⽰这幅图像是由640×480个像素点组成。
( )6. 常⽤的数字图像有损压缩编码⽅法包括算术编码、傅⾥叶变换和DCT变换编码。
( )7. 图像的滤波处理既能在空域进⾏,⼜能在频域进⾏。
( )8. 点运算的实质是灰度到灰度的映射过程。
( )9. 直⽅图修正的⽬的是使修正后的图像的灰度间距拉开或者使图像灰度分布均匀,图像细节清晰,达到增强图像的⽬的。
( )10. 图像的代数运算和⼏何运算都是在空间域进⾏图像处理的⽅法。
( )11. 空域滤波器的功能可分为平滑滤波和锐化滤波。
平滑的⽬的是消除噪声,锐化的⽬的是增强细节。
( )12. fft2⽤于执⾏⼆维快速傅⾥叶变换,会造成零频率在输出数据矩阵的四个⾓,可以使⽤fftshift把零频率移动到图像中间。
( )13. DCT变换是对实信号定义的⼀种频域变换。
( )14.图像中存在的冗余主要有空域冗余、时域冗余和频域冗余。
( )15. 空域滤波器的功能可分为平滑滤波和锐化滤波。
平滑的⽬的是增强细节,锐化的⽬的是消除噪声。
( )16.RGB⾊彩空间⽆论对于图像编辑还是对于打印⾊彩来说均是最佳的⾊彩模式。
( )17.彩⾊图像可以看成是三个灰度图像的叠加。
( )18.图像的伪彩⾊和假彩⾊处理都是为了达到图像增强的效果。
( )19.伪彩⾊和假彩⾊处理⼀样,处理的均是⿊⽩图像。
( )20.把图像从空域变换到频域,低频部分表⽰图像的细节信息,⽽⾼频部分表⽰的是图像的背景信息。
( )⼆、选择题1.⼀幅数字图像是______。
数字图像处理总复习题(答案)
复习题1一填空1 数字图像具有(精度高、处理内容丰富、方法易变、灵活度高)的优点。
2 平面上彩色图像的表达式为(I=f(x,y,); 平面上静止灰度图像的表达式为(I=f(x,y)).3 采样点数越多,(空间分辨率)越高。
4 灰度级数越多,(图像幅度分辨率)越高。
5 图像信息的频域有快速算法,可大大减少(计算量),提高(处理效率)。
6 正交变换具有(能量集中)作用,可实现图像的(高效压缩编码)。
7 图像的几何变换包括(图像平移、比例缩放、旋转、仿射变换和图像插值)。
8 哈达玛变换仅由(+1, -1)组成,与(数值逻辑)的两个状态对应。
9 图像增强的频域法主要包括(图像的灰度变换、直方图修正、图像空域平滑和锐化处理、彩色增强)。
10 灰度图像的对数变换作用是(扩展图像的低灰度范围),同时(压缩高灰度范围),使得图像灰度(均匀分布)。
11灰度图像的指数变换作用是(扩展图像的高灰度范围),同时(压缩低灰度范围)。
12 灰度图像的直方图定义为(数字图像中各灰度级与其出现频数间的统计关系)。
13 当直方图(均匀分布)时,图像最清晰。
14 直方图均衡化的原理是通过原始图像的(灰度非线性变换)使其直方图变为均匀分布,以增加(图像灰度值的动态范围),从而达到增强图像的(整体对比度),使图像更清晰。
15 图像平滑的目的是(去除或衰减图像的噪声和假轮廓)。
16 图像平滑的中值滤波器法适合滤除(椒盐噪声和干扰脉冲),特别适合(图像目标物是块状的图像滤波)。
17 具有丰富尖角几何结构的图像,一般采用(十字形滤波窗)。
18 图像锐化的目的是(加重目标轮廓,使模糊图像变清晰)。
19.图像的退化过程一般被看作(噪声的污染)过程,而且假定(噪声为加性白噪声)。
20.按照图像压缩的原理,图像分为(像素编码,预测编码,变换编码,其他编码)等四类。
21.衡量图像编码的客观保真度性能指标有(均方根误差RMS, 均方根信噪比SNR,峰值信噪比PSNR).22. 正交变换编码能够高压缩比的原因是(实现了图像能量的集中,使得大多数系数为0或者数值很小)。
数字图像处理复习练习题
练习题1、图像灰度量化用6比特编码时,量化等级为(B )A 32个B 64个C128 个 D 256 个2.下面说法正确的是:(B )A、基于像素的图像增强方法是一种线性灰度变换;B、基于像素的图像增强方法是基于空间域的图像增强方法的一种;C、基于频域的图像增强方法由于常用到傅里叶变换和傅里叶反变换,所以总比基于图像域的方法计算复杂较高;D、基于频域的图像增强方法比基于空域的图像增强方法的增强效果好。
3、采用幂次变换进行灰度变换时,当幂次取大于1时,该变换是针对如下哪一类图像进行增强。
(B)A图像整体偏暗B图像整体偏亮C图像细节淹没在暗背景中 D图像同时存在过亮和过暗背景4、采用模板[-1 1] T主要检测(A )方向的边缘。
A.水平B.45。
C.垂直D.135。
5、下列算法中属于图象锐化处理的是(C )A.低通滤波B.加权平均法C.高通滤波D.中值滤波 6、维纳滤波器通常用于(C )A、去噪B、减小图像动态范围C、复原图像口、平滑图像7、彩色图像增强时,(C )处理可以采用RGB彩色模型。
A.直方图均衡化B.同态滤波C.加权均值滤波D.中值滤波8、( B )滤波器在对图像复原过程中需要计算噪声功率谱和图像功率谱。
A.逆滤波B.维纳滤波C.约束最小二乘滤波D.同态滤波9、高通滤波后的图像通常较暗,为改善这种情况,将高通滤波器的转移函数加上一常数量以便引入一些低频分量。
这样的滤波器叫 B )。
A.巴特沃斯高通滤波器B.高频提升滤波器C.高频加强滤波器D.理想高通滤波器10、下列算法中属于图象锐化处理的是:(C )A.低通滤波B.加权平均法C.高通滤D.中值滤波11、一幅256*256的图像,若灰度级数为16,则存储它所需的比特数是:(A )A、256KB、512KC、1M C、2M12、噪声有以下某一种特性(D )A、只含有高频分量B、其频率总覆盖整个频谱C、等宽的频率间隔内有相同的能量D、总有一定的随机性13.利用直方图取单阈值方法进行图像分割时:(B )a.图像中应仅有一个目标b.图像直方图应有两个峰c.图像中目标和背景应一样大d.图像中目标灰度应比背景大14.在单变量变换增强中,最容易让人感到图像内容发生变化的是(C )A亮度增强觉B饱和度增强C色调增强D不一定哪种增强15、利用平滑滤波器可对图像进行低通滤波,消除噪声,但同时模糊了细节。
【数字图像处理】期末复习资料及期末模拟试卷(含答案)doc(DOC)
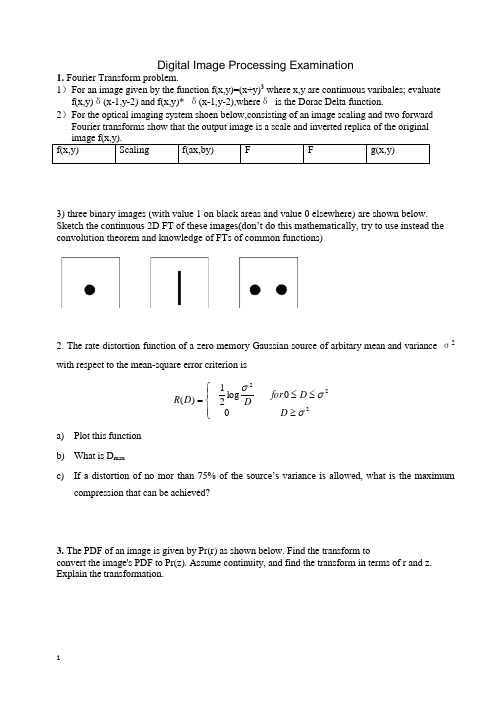
Digital Image Processing Examination1. Fourier Transform problem.1) F or an image given by the function f(x,y)=(x+y)3 where x,y are continuous varibales; evaluatef(x,y)δ(x-1,y-2) and f(x,y)* δ(x-1,y-2),where δ is the Dorac Delta function.2) F or the optical imaging system shoen below,consisting of an image scaling and two forwardFourier transforms show that the output image is a scale and inverted replica of the original3) three binary images (with value 1 on black areas and value 0 elsewhere) are shown below. Sketch the continuous 2D FT of these images(don’t do this mathematically, try to use instead the convolution theorem and knowledge of FTs of common functions)2. The rate distortion function of a zero memory Gaussian source of arbitary mean and variance σ2 with respect to the mean-square error criterion is⎪⎩⎪⎨⎧≥≤≤=2220log 21)(σσσD D for D D Ra) Plot this functionb) What is D max c) If a distortion of no mor than 75% of the source’s variance is allowed, what is the maximumcompression that can be achieved?3. The PDF of an image is given by Pr(r) as shown below. Find the transform toconvert the image's PDF to Pr(z). Assume continuity, and find the transform in terms of r and z. Explain the transformation.4. A certain inspection application gathers black & white images of parts as they travel along a con-veyor belt. It is necessary to sort the parts into two categories: parts with holes and parts with-out holes. An example of an image that might be taken by the inspection camera is shown at the right. Propose a method to identify and locate the objects of each category in the image so that they can be picked up by a robotic system and placed in different bins. Assume that the imaging system knows where each image pixel is located on the conveyor belt at every point in time.Provide an annotated flow chart of the algorithm you propose.5.In a given application, an averaging mask is applied to input images to reduce noise and then aLaplacian mask is applied to enhance small details. Would mathematics predict that the result should be the same if the order of the operations were reversed? What practical issues would be encountered in computer implementation?Digital Image Processing Examination1. A preprocessing step in an application of microscopy is concerned with the issue ofisolating individual round particles from similar particles that overlap in groups of two or more.Assuming that all particles are of the same size, propose a morphological algorithm that will produce an image that contains only the isolated (non-overlapping) particles that are not in contact with the boundary of the image.2. An image represented by a continuous function f(x, y) is w = 2 cm wide and h = 3 cm high. The imageis to be converted to an array of pixels by a scanner whose response is zero above 80 lines/centimeter in both the horizontal and vertical directions. The discrete image is represented by an array ˆf(n, m) where n and m take on integer values, 0 ~ n ~ N - 1, 0~ m ~ M-1.(a)Determine suitable values for N and M.(b)Assume that ˆf(n, m) = f(na, mb). Determine the values of a and b.(c)Determine constants A, B, C, D, E such that the DFT of fˆ can be expressed as)(00) ,() , (EvmDuniBnCmemnfAvu F+-==∑∑=(d)Find numbers (P1, P2) such that F(u + jP1, v + kP2) = F(u, v) for any integers j, k, u, v.3. The arithmetic decoding process is the reverse of the encoding procedure. Decode the message 0.23355 given the coding model.4. The gradient of a function f (x) is defined as⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∂∂∂∂=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=∇y f x f G G f y xComputationally, the first derivative is implemented by calculating the difference between adjacent pixels.(a) Is the following a linear operator?2122⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛∂∂+⎪⎭⎫ ⎝⎛∂∂=∇y f x f f (b) State how would you implement the above operator using differences between pixels.(c) A Sobel operator uses two masks, Hx and Hy to process an image. Explain why are two masksneeded and what do they measure?(d)Write down the masks Hx and Hy, and identify them in the followingfigures:5. The three images shown were blurred using square averaging masks of sizes n=23, 25 , and 45, respectively. The vertical bars on the left lower part of (a) and (c) are blurred, but a clear separation exists between them. However, the bars have merged in image (b), in spite of the fact that the mask that produced this image is significantly smaller than the mask that produced image (c). explain this.Digital Image Processing Examination1. An image array f(m, n) of size M1 × N1 is to be convolved with a filter array h(m, n) of size M2 × N2 to produce a new image array g(m, n).1)Write a pseudo code program that describes a method to compute g(m, n) throughthe use of Fourier transforms. The result should be the same size as would beachieved with direct convolution.2)Modify the algorithm so that it does the correlation f ~ h rather than theconvolution.2. You have the job of designing an algorithm that will count the number of objects with holes and the number of objects without holes in images of the kind shown here. Assume that the images are binary with 0 corresponding to black and 1 correspondingto white. The imaging system is of low quality and produces images that are corrupted with salt and pepper noise.The objects do not overlap or touch, but may be close to each other in any direction.They may be of any shape or size. The algorithm should not be confused by the salt and pepper noise, and should not count noise pixels as objects.Write a pseudo-code description of your algorithm. You may also include a block diagram and other information to make it understandable to a programmer. State any assumptions you make, such as: “Objects must contain at least 50 pixels.”least 50 pixels.”3. Suppose that an image has the gray-level probability density functions shown. Here, p 1(z) corresponds to objects and p 2(z) corresponds to the background. Assume that p 1=p 2 and find the optimal threshold between object and back ground pixels.4. The Sobel operator computes the following quantity at each location (x, y) in an image array, A:Gx[j,k]=(A[j+1,k+1]+2A[j+1,k]+A[j+1,k-1])-(A[j-1,k+1]+2A[j-1,k]+A[j-1,k-1]) Gy[j,k]=(A[j-1,k-1]+2A[j,k-1]+A[j+1,k-1])-(A[j-1,k+1]+2A[j,k+1]+A[j+1,k+1]) G[j,k] = |Gx[j,k]| + |Gy[j,k]|The position of A[j, k] is column j and row k of the array.The operation is implemented as the convolution of the image array A with two masks, Mx and My followed by the magnitude operation.1) Write a 3 × 3 array for each mask, Mx and My.2) What mathematical operation on an image array is approximated by the Sobeloperator? Show how the Sobel operator is related to the mathematical operation.5. Answer the following questions about morphological image processing.(a) Shown below are two tables with expressions that relate to binary morphological image processing. Associate each expression in the left table with one from the right table.(b) A well-known morphological algorithm uses the following iteration with a structuring element B.(1) Initialize X[p] = 1 for some pixel A p ∈(2) A B X Y )(⊕=(3) If X Y ≠ then set X = Y and repeat (2)An original set A is shown in (A) and an initial pixel p 2 A is shown in (B). The result after one iteration of the algorithm with structuring element⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=010111010Bis shown in (C). Fill in the result of the next two iterations by marking theappropriate pixels for the set Y in (D) and (E). In frame (F) show the result for Y that would be reached after a large number of iterations.Digital Image Processing Examination1. Consider the edge model depicted below. Sketch the gradient and Laplacian of the signal. It is not needed to compute exact numerical values in your answer. Plot of approximate shapes of the responses will be sufficient.2. The white bars in the test pattern shown are 7pixels wide and 210 pixels high. The separation between bars is 17 pixels. What would this image look like after application of .1) A 3*3 arithmetic mean filter?2) A 7*7 median filter.3) A 9*9 contraharmonic mean filter with Q=13. The video coding system introduced in the class utilizes several major components –inter-frame motion estimation, motion compensated prediction, DCT, Huffman coding,and quantization.(a)When an encoded signal can be used to reconstruct the exact value of theoriginal signal, we say the encoding method is lossless; otherwise, it’s calledlossy. A lossy coding technique introduces distortion to the signal.Which component in the above video coding system is lossy?(b)The motion compensation process in the encoder generates a motion vectorand prediction errors for each image block in the video signal. Suppose duringthe transmission of the encoded video stream, one motion vector is lost (e.g.,due to the network erasure error). What will be the visual effects of suchtransmission errors on the decoded image sequence?4.Consider a black-and-white image consisting of round and rectangular objects, as shown in the image below. Assume the sizes of the objects are fixed and known. We also know that the width and length of the rectangles are larger than the diameter of the circles. None of the rectangles are tilted. In general, the objects may overlap with each other.Design a morphological operation based system to automatically detect all the instances of the rounds objects that overlap with rectangular objects.5. An image A, represented by an N × M array of bytes, has a uniform brightnesshistogram. It is desired transform A into an image B in a way that produces a triangular brightness histogram2550,36240][≤≤=k k MNk h bDescribe a process that will accomplish the transformation. If possible, derive an equation for the transformation function. At a minimum, sketch the transformation function and indicate how you would use it in a program to compute the array B.模拟试卷一1.对将一个像素宽度的8通路转换到4通路提出一种算法。
数字图像处理考试试题

数字图像处理考试试题一、选择题(每题 3 分,共 30 分)1、以下哪个是数字图像处理的主要研究内容?()A 图像增强B 图像压缩C 图像分割D 以上都是2、图像数字化的过程不包括()A 采样B 量化C 编码D 滤波3、灰度直方图反映了图像中()A 灰度级的分布情况B 像素的分布情况C 图像的清晰度D 图像的对比度4、中值滤波的主要作用是()A 去除噪声B 增强边缘C 平滑图像D 锐化图像5、图像旋转后出现的空白区域通常采用()方法进行填充。
A 最近邻插值B 双线性插值C 均值插值D 零值填充6、以下哪种图像压缩算法是无损压缩?()A JPEGB MPEGC Huffman 编码D 小波变换7、在图像分割中,阈值分割法是基于图像的()特征。
A 灰度B 纹理C 形状D 颜色8、边缘检测算子中,对噪声比较敏感的是()A Roberts 算子B Sobel 算子C Prewitt 算子D Canny 算子9、图像的几何变换不包括()A 平移B 旋转C 缩放D 傅里叶变换10、以下哪个指标用于评价图像增强的效果?()A PSNRB MSEC SNRD 以上都是二、填空题(每题 3 分,共 30 分)1、数字图像可以用矩阵来表示,矩阵中的元素值对应图像的______。
2、图像的分辨率越高,包含的______越多。
3、图像锐化是为了增强图像的______。
4、常见的彩色模型有 RGB、HSV 和______。
5、图像平滑处理中,均值滤波的窗口越大,平滑效果越______,但同时也会导致图像细节丢失越多。
6、图像的傅里叶变换将图像从______域转换到______域。
7、基于区域的图像分割方法通常依据图像的______特性来划分区域。
8、图像压缩的目的是减少图像的______,以便于存储和传输。
9、形态学图像处理中的膨胀操作可以使图像中的目标______。
10、图像的对比度是指图像中______的差异程度。
三、简答题(每题 10 分,共 20 分)1、简述图像增强的目的和常用方法。
数字图像处理考试卷
一、填空题1、数字图像处理研究的内容概括起来主要有__图像数字化___、图像变换、图像增强、图像复原、图像分割与分析、图像压缩编码、模式识别和图像融合等。
2、位图可以表示为:灰度图、黑白图、彩色图。
3、根据光源的性质,成像可分为:反射成像,透射成像。
4、彩色可以用:亮度、色调、饱和度来描述。
5、傅里叶变换在图像处理中的应用有:特征提取、空间频率与滤波、图像恢复、纹理分析。
6、图像处理中用到的频域变换方式有:傅里叶变换、离散余弦变换、小波变换等。
二、判断1、图像分辨率越高,图像质量越好,占用的存储空间越小(×)2、图像出现马赛克是由于量化层次太少造成(×)3、假彩色图像处理的是自然彩色图像,伪彩色图像处理的是灰度图像(√)4、GPEJ图像压缩标准用的是快速傅里叶变换(×)5、图像的光滑化,会导致图像模糊不清(√)6、对比度拉伸能增强图像的对比度(√)7、电影中的“蓝幕”采用的是灰度窗口变换的方法(√)8、骨架化是图像轮廓逐次增加边缘,最终变为具有某一宽度的骨架(×)9、直方图均衡化可以增强整个图像对比度,增加灰度分层(×)10、预测编码是一种无损压缩编码(×)三、选择题1、下列哪一个模板可用于图像平滑(A)A、1/9 1/9 1/9B、1 1 1C、1/3 1/3 1/3D、-1 -1 -11/9 1/9 1/9 1 -8 1 1/3 1/3 1/3 -1 8 -11/9 1/9 1/9 1 1 1 1/3 1/3 1/3 -1 -1 -12、对于含有孤立线噪声的图像,既要保证图像的边缘,又要去除噪声应该用那种滤波器(B)A、box模板B、中值滤波器C、gauss模板D、prewitt模板3、将图像“name.tif”存储到文件中的命令(C)A、imread(’name.tif’)B、loadC、imwrite(’name.tif’)D、imshow(’name.tif’)4、对一幅二值图像做腐蚀的结果(B)A、图像面积放大B、图像面值缩小C、图像面积不变D、图像边界变圆5、下列算法中属于局部处理的是(D)A、灰度线性变换B、二值化C、傅里叶变换D、中值滤波四、简答题1、什么是数字图像处理系统?他有那几部分组成?答:数字图像处理系统是应用计算机或专用数字设备对图像信息进行处理的信息系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.填空题1.灰度图像中,f表示灰度值,对应客观景物被观察到的亮度。
文本图像常为二值图像,f只能取两个值。
分别对应文本与空白。
彩色图像在每一个图像点同时具有红绿蓝3个值。
2.基本的坐标变换包括平移、放缩、旋转。
3.灰度映射是根据原始图像中每一个像素的灰度值。
按照某种映射规则,直接将其变换或转化为另一种灰度值。
从而达到增强图像视觉效果的目的。
4.图像工程中,图像处理着重强调在图像之间进行的转换。
图像分析主要是对图像中感兴趣的目标进行检测和测量。
图像理解重点在图像分析的基础上,进一步把握图像中各目标的性质和他们之间的相互联系。
指导和规划行动5.视觉效果有趋向于过低或过高估计不同亮度边缘值,这种现象被称为马赫带效应。
6.低通滤波器是要保留图像中的低频分量而除去高频分量。
高通滤波器是要保留图像中的高频分量而除去低频分量。
7.图像处理和分析系统由采集、显示、储存、通信、处理分析五个部分组成。
8.根据解码结果对图像的保真程度,图像分析方法可以分为两大类:信息保存型、信息损失型。
9.YIQ是NSTC彩色电视的颜色模型。
其中Y表示亮度,I表示色彩,Q表示饱和度。
10.拉伸变换是一种在一个方向上放大而在正交方向上缩小的变换,剪切变换对应像素仅其水平坐标或垂直坐标之一发生平移变化的变换。
11.直方图变换的具体方法主要有直方图均衡化和直方图规定化。
12.一般情况下表示100*100的彩色图像的数据量大小是240000比特。
为了减少信道噪声对传输信息的影响,引入了信道编码。
规定每传输8bits加入2bits的校正码。
那么以100kbits的传输速率传输一幅彩色图像所需的时间是3秒。
13.灰度变换是基于点操作的增强方法,这种处理方法不改变点操作的位置,只改变像素的灰度值。
14.无约束恢复方法是将图像看做一个数字矩阵,从数字角度进行恢复**,而不考虑恢复后的图像所受到的物理约束。
15.色调和饱和度合起来称为色度,彩色可用亮度和色度共同表示。
16.RGB是光的三原色,CMY是颜料的三原色。
17.图像编码的目的是在保证一定视觉质量的前提下减少数据量(从而也减少图像传输所需的时间)。
这也可以看做使用较少的数据量来获得较好地视觉质量。
18.多尺度小波的尺度变化使得对图像的小波分析可以聚集到间断点,奇异点和边缘。
也可以获得全局的视点。
这个特性是小波变换独有的。
19.保真度因子是滤波器的带宽除中心频率,相对带宽的倒数。
20.图像中的边缘和噪声对应傅里叶变换域中的高频高频部分,图像的主体对应着低频部分。
二.选择题。
1.数字图像中的数字冗余有3种。
对数字图像处理来说,信源编码器可以由映射器、量化器和符号编码器组成。
其中为了消除编码冗余的是C,消除主观视觉冗余的是B,如果是有损编码的话,肯定含有B。
A.映射器 B.量化器 C.符号编码器 D.采样器2.下面那一项不属于图像处理的A。
A.图像描述B.改善人的视觉效果C.为自动识别打基础。
D.压缩编码3.对一组噪点较多的数码图像片进行增强处理。
为了尽可能的去除噪声,但是保留图像的细节,应该采用B效果最好。
A.邻域平均滤波器B.中值滤波器C.锐化滤波器D.高通滤波器4.图像采集中如果需要实现紫外线成像。
需要采用的光电传感器件类型为D。
A.CMOS器件 B.CID器件 C.电荷注射器件D。
CCD器件5.一幅512*512像素的彩色图像容量大小为A。
A.6.291456Mbit B。
3.14522Mbit C.9.43718Mbit D.32.582Mbit6. 在计算机中表示的一幅640*800的数字图像f(x,y),下面表示A是合法的。
A.f(200,120)=100 B.f(300,200)=271 C。
f(210.5,76)=82 D.f(3,90)=23.67.对一组噪点较多的数码图像片进行增强处理。
为了尽可能的去除噪声,但是保留图像的细节,应该采用B效果最好。
A. 邻域平均滤波器B.中值滤波器C.锐化滤波器D.高通滤波器8.虚假轮廓形成的原因主要由于B。
A.噪声 B.量化失误 C.采样不合适 D.空间分辨率过高9.投影重建技术是根据对场景的投影数据获取对场景中数据分布信息。
其中PET成像属于A 成像。
A.发射断层投影 B.投射断层C。
电阻抗断层 D.反射10.如果在频域中同时将图像亮度范围进行压缩的同时提高图像的对比度。
需要用到A。
A.同态滤波B.低通滤波C.高频滤波D.带通滤波11.下面哪个选项不是属于HIS彩色模型中的分量A。
A.色度B.亮度 C.饱和度D.色调12.水印的B是指图像水印低于外界干扰。
在图像产生失真的条件下仍能坚持其自身完整性和对其检测准确性的能力。
A.显著性B.稳健性C.低复杂性D.通用性13.投影重建技术是根据对场景的投影数据获取对场景中数据分布信息。
其中PET成像属于A 成像。
A.发射断层投影 B.投射断层C。
电阻抗断层 D.反射14.对于一幅在拍摄中由于拍摄对象运动而得到的图像,需要采用C图像处理技术。
A.直方图均衡B.空域增强C.图像恢复技术D.图像重建15.滤除脉冲噪声的效果好,但是滤除加性高斯噪声的效果差的滤波器是B。
A.低通滤波器B.中值滤波器C.均值滤波器D.高通滤波器16.JPEG格式的图片能够去除多种数据冗余。
下面答案中由一种是不属于的C。
A.编码冗余B.像素间冗余C.前后帧像素冗余D.主观视觉冗余17.虚假轮廓形成的原因主要由于B。
A.噪声 B.量化失误 C.采样不合适 D.空间分辨率过高18.人眼对不同亮度区域噪声视觉敏感性不同,通常对C较为敏感。
A.低灰度B.高灰度C.中等灰度D.高亮度19.下列哪一项不属于数据冗余C.A.心里视觉冗余B.像素间冗余C.译码冗余D.编码冗余三.判断题。
1.直方图均匀化能增强整个图像对比度。
也可以用来突出感兴趣灰度范围。
即修正直方图,使其具有要求的形式。
(F)2.频域图像增强是对像素将进行操作,而空域图像增强是在频域面进行操作。
(F)3.中值滤波器是线性滤波器的一种,它是依靠模板来实现滤波的。
(T)4.对一定色调的彩色,加入白色或者深色光,亮度变化色调不变。
(T)5.图像减法运算可以确定物体边缘位置的梯度。
(F)6.在空间采集中,随着采样间隔的降低,空间分辨率反而提高。
(T)7.水印按特性可分为鲁棒数字水印和易损数字水印,鲁棒数字水印一般用于数字作品中的标识著作权信息。
(T)8.有损编码和无损编码的区别,主要在于是否对主观冗余去除,引入不可逆的量化器步奏。
(T)。
9.离散余弦变换是一种可分离正交变换,并且是对称的。
(T)10.维纳滤波器是一种最小的均方差滤波器。
(T)11.无损编码和有损编码的最大区别是压缩比。
(F)12.二维余弦变换的最大特点是变换后图像有用的信息集中在左上方。
(T)四.简答题1.请简述什么是马赫带效应?答:马赫带效应是指人的视觉系统有趋于过高或过低估计不同亮度趋于边界值的现象。
即从一个物体表面感受到的主观亮度并不是物体所受照度的简单比例函数。
2.简述算术编码的特点。
答:算数编码的特点:1.只需用到加法和移位运算(算术)。
2.从整个符号序列出发采用递推形式连续编码。
3.一个算术码字要赋予整个信源符号序列。
4.码字本身确定0和1之间的一个实数区间。
5.源符号和码字间的押题一对应关系并不存在,算术码不是块码。
3.简述图像恢复技术和图像增强技术的异同。
答:相同点:希望改进输入图像的视觉质量。
不同点:1.增强技术借助视觉特性。
而图像恢复技术要根据相应的退化模型。
2.图像恢复技术的处理目的是希望使退化图像恢复本来的面目。
而图像增强只关心图像局部信息,不管增强后图像是否符合原图像,是否失真。
4.请简述什么是数据冗余?答:数据是用来表示信息的,如果不同的方法为表示给定量的信息使用了不同的数据量,那么使用较多数据量的方法中。
有些数据代表了无用的信息,或者重复地表达了数据已表达的信息。
5.请简述什么是同态滤波器。
答:同态滤波是一种在频域中同时将图像亮度范围进行压缩和将图像对比度进行增强的方法:实现的方法是先利用非线性的对数噪声变换将乘性噪声变换为加性噪声。
然后用线性滤波器消除噪声后再进行非线性的指数反变换获得原始的“无噪声”图像。
6.简述无失真编码定理和率失真编码定理。
答:无失真编码定理给出在没有失真的条件下(无损压缩),编码表示每个信源时可达到最小平均码字长度。
率失真编码定理简称率失真定理。
也称作信源编码定理。
该定理将对固定字长编码方案的失真(重建误差)D与编码所用的数据率(如每像素比特率)R联系在一起。
它给出由于压缩而产生的平均误差被限制在某个最大允许水平D时的最小R。
五.论述题。
1.论述小波水印水印嵌入的主要步骤。
答:(1)确定小波基。
对原始图像L级小波变换,分别得到一个最低频子图像和3L个高频子图像。
(2)计算高频子图像的人眼视觉掩盖特性的视觉阀值T(u,v,l,s),并选择小波系数插入水印。
(3)嵌入水印(即用水印序列来调制前N个小波系数)。
F1(u,v)=F(u,v)+qwi(4)将嵌入水印的高频子图像结合低频子图像一起进行小波反转换。
得到嵌水印图像f1(x,y)2.论述傅里叶反变换重建的基本步骤。
答:基本步骤:(1)建立数学模型,其中已知量和未知量都是连续实数的函数。
(2)利用反变换公式(可有多个等价的)解未知量。
(3)调节反变换公式以适应离散,有噪声应用的需求。
3.讨论空间滤波中平滑滤波器和锐化滤波器的关系。
答:平滑滤波器的目的可以分为两类:一是模糊,目的是在提取较大的目标前区出台小的细节或者是将区域内的小间断连接起来。
另一类是消除噪声。
也就是减弱或消除了图像中的高频成分。
达到增强低频成分,平滑图像中细节的目的。
而锐化滤波器的目的是增强被模糊的细节,减弱或者消除图像中的低频成分。
达到增强高频成分,锐化图像中细节的效果。
两者的效果相反,互为补充。
从原始图像中减去平滑滤波器的结果就可以得到锐化滤波器的效果。
而从原始图像中减去锐化滤波器的结果就可以得到平滑滤波器的效果。
4.论述为什么图像压缩又被称为图像编码?答:由于一幅图像存在数据冗余和主观视觉冗余,我们的压缩方式就是从这两方面着手开展的。
(1),因为有数据冗余,当我们将图像信息描述方式改变后,可以压缩掉这些冗余。
(2)因为有主观视觉冗余,当我们忽略一些视觉不太明显的微小差异,可以进行所谓的“有损压缩”。
而图像压缩,从本质上讲,就是对要处理的图像源数据用一定的规则进行变换和组合。
从而达到以尽可能小的代码(符号)来表示尽可能多的数据信息的目的。
压缩通过编码来实现,或者说编码带来压缩的效果。
所以一般把此项处理称为压缩编码。
5.论述什么叫做变长编码?答:变长编码是一种统计编码压缩方式。
可减少编码冗余。