V90伺服应用之内部设定位置模式
基于西门子S7-200 SMART的SINAMICS V90位置控制应用
1收稿日期:2020-05-27作者简介:翟雳(1981—),男,江苏常州人,本科,高级讲师,研究方向:机电一体化。
随着自动化水平的不断提高,越来越多的工业控制场合需要精确的位置控制。
因此,如何更方便、更准确地实现位置控制是工业控制领域内的一个重要问题。
位置控制的精确性主要取决于伺服驱动器和运动控制器的精度。
1 SINAMICS V90伺服驱动简介西门子SINAMICS V90是2013年推出的小型、高效便捷的标准运动控制伺服驱动系统,配合使用SIMOTICS S-1FL6伺服电机。
SINAMICS V90伺服驱动支持九种控制模式,包括四种基本控制模式(外部脉冲位置控制模式、内部设定值位置控制模式、速度控制模式、转矩控制模式)和五种复合控制模式。
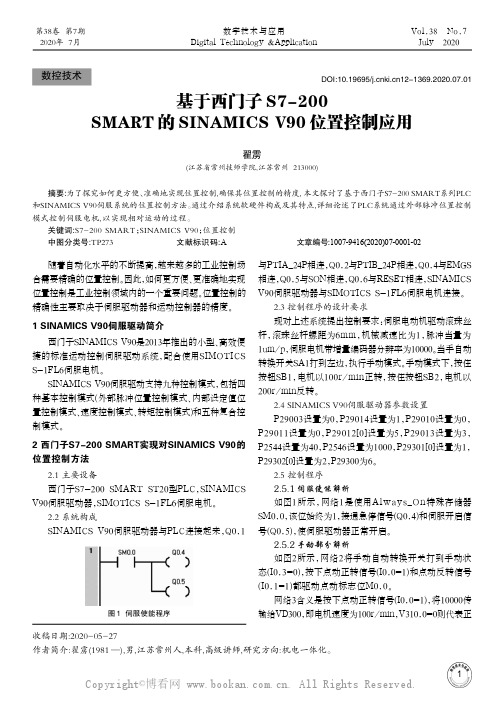
2 西门子S7-200 SMART实现对SINAMICS V90的位置控制方法2.1 主要设备西门子S7-200 SMART ST20型PLC,SINAMICS V90伺服驱动器,SIMOTICS S-1FL6伺服电机。
2.2 系统构成SINAMICS V90伺服驱动器与PLC连接起来,Q0.1与PTIA_24P相连,Q0.2与PTIB_24P相连,Q0.4与EMGS 相连,Q0.5与SON相连,Q0.6与RESET相连,SINAMICS V90伺服驱动器与SIMOTICS S-1FL6伺服电机连接。
2.3 控制程序的设计要求现对上述系统提出控制要求:伺服电动机驱动滚珠丝杆,滚珠丝杆螺距为6mm,机械减速比为1,脉冲当量为1um/p,伺服电机带增量编码器分辨率为10000。
当手自动转换开关SA1打到左边,执行手动模式。
手动模式下,按住按钮SB1,电机以100r/min正转,按住按钮SB2,电机以200r/min反转。
2.4 SINAMICS V90伺服驱动器参数设置P29003设置为0,P29014设置为1,P29010设置为0,P29011设置为0,P29012[0]设置为5,P29013设置为3,P2544设置为40,P2546设置为1000,P29301[0]设置为1,P29302[0]设置为2,P29300为6。
西门子V90伺服系统优势分析
SINAMICS V90伺服驱动和SIMOTICS S-1FL6 伺服电机组成了性能优化,易于使用的伺服驱动系统,八种驱动类型,七种不同的电机轴高规格,功率范围从0.05kW到7.0kW以及单相和三相的供电系统使其可以广泛用于各行各业,如:定位,输送,收放卷等设备中,同时该伺服系统可以与S7-1500T/S7-1500/S7-1200 进行完美配合,实现丰富的例如凸轮/齿轮等运动控制功能,应用在横切、追剪等设备中。
SINAMICS V90 伺服驱动系统特点概述伺服性能优异1、先进的一键优化及自动实时优化功能使设备获得更高的动态性能2、自动抑制机械谐振频率3、1 MHz 的高速脉冲输入4、20 位分辨率的多圈绝对值编码器性价比高1、集成所有控制模式:外部脉冲位置控制、内部设定值位置控制(通过程序步或Modbus或PROFINET)、速度控制和扭矩控制2、集成内部设定值位置控制功能3、全功率驱动标配内置制动电阻4、集成抱闸继电器(400V 型),无需外部继电器使用方便1、集成了PTI, PROFINET, USS, Modbus RTU多种上位接口方式2、与控制系统的连接快捷简单3、西门子一站式提供所有组件4、快速便捷的伺服优化和机械优化5、简单易用的SINAMICS V-ASSISTANT 调试工具6、通用SD 卡参数复制运行可靠1、更宽的电压范围:200 V ... 240 V –15% / +10% (230V 型) 及380 V (480)V –15% / +10% (400V 型)2、高品质的电机轴承3、电机防护等级IP 65,轴端标配油封4、集成安全扭矩停止(STO)功能5、驱动与电机可靠组合Sinamcs V90集成了丰富的控制模式,如外部脉冲位置控制(PTI)、USS/Modbus 连接、内置定位(IPos)以及转速和转矩控制等,方便用户使用。
全功率集成的制动电阻也降低了用户成本。
此外,伺服驱动器还具有高达1MHz的高速脉冲输入,并支持20位分辨率的绝对编码器。
S7-1500对V90 PN进行位置控制的三种方法

S7-1500(T) 对V90 PN 进行位置控制的三种方法目录1概述 (3)2SINA_POS(FB284)介绍 (3)3SINA_POS功能说明 (6)3.1概述 (6)3.2功能块的运行模式介绍 (6)3.2.1运行条件 (6)3.2.2相对定位运行模式 (7)3.2.3绝对定位运行模式 (8)3.2.4连续运行模式(按指定速度运行) (9)3.2.5主动回零 (9)3.2.6直接设置回零位置 (10)3.2.7运行程序段 (10)3.2.8按指定速度点动 (11)3.2.9按指定距离点动 (12)3.3基于ModePos 值的运行模式切换说明 (12)4项目配置 (13)4.1V90 PN项目配置要点 (13)4.2S7-1500项目配置步骤 (15)1概述S7-1200/1500可以通过PROFINET通信连接V90 PN伺服驱动器,PLC通过西门子提供的驱动库中的功能块FB284可实现V90的基本定位控制。
获得FB284功能块的两种方法如下,可选择其中一种:1.安装Startdrive软件,在TIA Portal软件中就会自动安装驱动库文件,2SINA_POS(FB284)介绍功能块FB284在命令库中的位置如图2-1所示:图2-1 功能块FB284功能块可在下述组织块(OB)中进行调用:·循环组织块:OB1·循环中断组织块:如OB32此功能块可配合SINAMICS驱动中的基本定位功能使用,需注意在驱动侧必须激活基本定位功能,并使用西门子111通信报文。
FB284功能块介绍见表2-1。
表2-1 FB284功能块说明类型默认值描述类型默认值描述输入0运行模式:ModePos INT1 = 相对定位2 = 绝对定位3 = 连续运行模式(按指定速度运行)4 = 主动回零5 = 直接设置回零位置6 = 运行程序段 0~157 = 按指定速度点动8 = 按指定距离点动EnableAxis BOOL0伺服运行命令:0 = 停止(OFF1)1 = 启动CancelTraversing BOOL 1 0=取消当前的运行任务1 = 不取消当前的运行任务1暂停任务运行:IntermediateStop BOOL0 = 暂停当前运行任务1 = 不暂停当前运行任务0正方向Positive BOOLNegative BOOL 0 负方向0点动信号1Jog1BOOL0点动信号2Jog2BOOLPN无效FlyRef BOOL0此输入对V900故障复位AckError BOOL0激活请求的模式ExecuteMode BOOLPosition DINT0[LU]ModePos=1或2时的位置设定值ModePos=6时的程序段号Velocity DINT0ModePos=1、2、3时的速度设定值[1000LU/min]设定速度百分比0~199%OverV INT 100[%]OverAcc I NT 100[%] ModePos=1、2、3时的设定加速度百分比 0~100%=1、2、3时的设定减速度百分ModePosOverDec INT 100[%]比 0~100%ConfigEPOS DWORD0可以通过此参数控制基本定位的相关功能,位的对应关系如下表所示:ConfigEPos位功能说明ConfigEPos.%X0 OFF2停止ConfigEPos.%X1 OFF3停止ConfigEPos.%X2 激活软件限位ConfigEPos.%X3 激活硬件限位ConfigEPos.%X6 零点开关信号ConfigEPos.%X7 外部程序块切换ConfigEPos.%X8 ModePos=2、3时类型默认值描述支持设定值的连续改变并且立即生效注意:如果程序里对此进行了变量分配,必须保证初始数值为3(即ConfigEPos.%X0 和ConfigEPos.%X1等于1,不激活则OFF2和OFF3停止始终生效)HWIDSTW HW_IO 0 V90设备视图中报文111的硬件标识符HWIDZSW HW_IO0V90设备视图中报文111的硬件标识符输出0驱动已使能AxisEnabled BOOL0目标位置到达AxisPosOk BOOL0设定位置到达AxisSpFixed BOOLAxisRef BOOL0已设置参考点0驱动报警AxisWarn BOOL0驱动故障AxisError BOOL0驱动处于禁止接通状态,检查Lockout BOOLConfigEPos管脚控制位中的第0位及第1位是否置1。
实例200Smart与V90伺服modbus通信如何实现内部控制?

实例200Smart与V90伺服modbus通信如何实现内部控制?V90伺服可实现内部位置控制,但使用PLC的I/O口控制接线及应用相对比较复杂,V90集成了Modbus和USS通信,可以利用通信控制伺服实现内部位置控制和速度控制,只需要一根通信电缆即可实现控制大为的简化了接线。
关键在于如何编写modbus通信程序。
一.位置模式IPOS伺服的关键参数进行设置:1. 为驱动设置RS485 总线地址。
· p29004 = 12. 通过参数 p29007 选择 Modbus 协议。
· p29007 = 23. 通过参数p29008 选择Modbus 控制源。
· p29008 = 1(p29008 = 1:设定值和控制字来自于Modbus PZD)4. 通过参数p29009 设置传输波特率。
· p29009 = 6 (9600 波特率)5. 保存参数并重启驱动。
6. 设置驱动的工作模式为IPOS 控制模式。
7. 配置 PLC 相关参数。
编写程序:控制字每位设置方法如下表:位信号描述(IPOS内部位置模式)SON_OFF1 通过上升沿伺服使能(脉冲可以被使能)0:OFF1(通过斜坡函数发生器停车,脉冲被取消,准备上电就绪)1OFF2 1:无OFF2(允许使能)0:OFF2(立即取消脉冲,上电被禁止)2OFF3 1:无OFF3(允许使能)0:OFF3(快速停车,脉冲被消除且上电被禁止)3 OPER 1:允许运行(脉冲可以被使能)0:禁止运行(取消脉冲)4 SETP_ACC 触发上升沿来接收 MDI 设定值5 TRANS_TYPESE 1:立即接收新的设定值0:通过触发上升沿来接收新的设定值6 POS_TYP 1:绝对定位0:相对定位7 RESET 复位故障8 预留9 预留10 PLC 使能 PLC 的控制权11 预留12 预留13 SREF 启动回参考点(对于回参考点模式0,用作 REF 信号)14 预留15 预留二.速度模式S参数设置:1. 为驱动设置 RS485 总线地址。
SINAMICS V90伺服转矩控制配置方法

SINAMICS V90伺服转矩控制配置方法关键词:SINAMICS V90伺服转矩控制摘要:在单独使用转矩控制时,如果电机输出转矩大于负载转矩,那么电机将进入加速状态,可能会出现飞车现象。
SINAMICS V90 系统在转矩控制时提供了速度监视功能,能够在发生飞车故障时封锁脉冲,并输出故障状态。
本文将对SINAMICS V90 的转矩控制配置方法进行介绍。
1、概述SINAMICS V90提供了四种基本控制模式:PTI 外部脉冲位置控制模式IPos 内部设定值位置控制模式S 速度控制模式T 转矩控制模式在SINAMICS V90 的转矩控制模式(T)下,电机将以设定的转矩进行输出。
一般情况下,转矩控制的电机需要配合速度控制的电机使用,以实现对生产线张力等的控制。
在单独使用转矩控制时,如果电机输出转矩大于负载转矩,那么电机将进入加速状态,可能会出现飞车现象。
SINAMICS V90 系统在转矩控制时提供了速度监视功能,能够在发生飞车故障时封锁脉冲,并输出故障状态。
本文将对SINAMICS V90 的转矩控制配置方法进行介绍。
2、SINAMICS V90 转矩控制功能描述2.1 激活转矩控制通过设置参数P29003 = 3 激活转矩控制。
注意:重新上电后,SINAMICS V90 才能使转矩控制模式生效!2.2 转矩设定值源转矩设定值有两个来源可以使用,这两个源可以通过命令TSET 来选择:TSET = 0 (默认设置)使用AI2 设定转矩TSET = 1 使用参数P29043 设定转矩2.2.1 使用AI2 设定转矩在转矩模式下,在TSET 为低电平时,AI2 作为转矩设定值。
AI2 的电压值对应的转矩参考值为P29041[0]。
比如:P29041[0] = 100% 10V 对应额定转矩*100%P20041[0] = 50% 10V 对应额定转矩*50%2.2.2 使用参数P29043 设定转矩在转矩模式下,在TSET 为高电平时,参数P29043 作为转矩设定值。
V90 EPOS控制相关参数设置

V90 EPOS控制相关参数设置
PLC通过PROFINET与V90 PN伺服驱动器搭配进行位置控制,使用V90 PN的其本定位功能(EPOS)时,需要使用调试软件V-Assistant对V90 PN进行项目配置。
1. 设置控制模式为"基本位置控制(EPOS)"
2. 配置通信报文为西门子报文111
3. 点击"设置PROFINET->配置网络",设置V90的IP地址及设备名称
注意:设置的设备名称一定要与PLC项目中配置的相同。
参数保存后需重启驱动器才能生效。
4. 设置机械结构相关参数
需要设置正确的齿轮比,以及设置负载转动一圈物体移动距离所对应的长度单位(LU),例如定义1LU对应0.001mm,齿轮比为1:1,而负载
移动一圈的距离为10mm,则此时负载转动一圈对应的长度单位为10000LU。
5. 设置基本定位功能的相关参数
可设置最大加减速度,运行程序段的参数、Jog点动参数和定位监控窗口参数。
6. 设置回零相关参数
7. 其他相关基本定位参数,在参数列表中设置。
基于西门子S7-200SMART的SINAMICSV90位置控制应用
基于西门子S7-200SMART的SINAMICSV90位置控制应用作者:***来源:《数字技术与应用》2020年第07期摘要:为了探究如何更方便、准确地实现位置控制,确保其位置控制的精度,本文探讨了基于西门子S7-200 SMART系列PLC和SINAMICS V90伺服系统的位置控制方法。
通过介绍系统软硬件构成及其特点,详细论述了PLC系统通过外部脉冲位置控制模式控制伺服电机,以实现相对运动的过程。
关键词:S7-200 SMART;SINAMICS V90;位置控制中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2020)07-0001-02随着自动化水平的不断提高,越来越多的工业控制场合需要精确的位置控制。
因此,如何更方便、更准确地实现位置控制是工业控制领域内的一个重要问题。
位置控制的精确性主要取决于伺服驱动器和运动控制器的精度。
1 SINAMICS V90伺服驱动简介西门子SINAMICS V90是2013年推出的小型、高效便捷的標准运动控制伺服驱动系统,配合使用SIMOTICS S-1FL6伺服电机。
SINAMICS V90伺服驱动支持九种控制模式,包括四种基本控制模式(外部脉冲位置控制模式、内部设定值位置控制模式、速度控制模式、转矩控制模式)和五种复合控制模式。
2 西门子S7-200 SMART实现对SINAMICS V90的位置控制方法2.1 主要设备西门子S7-200 SMART ST20型PLC,SINAMICS V90伺服驱动器,SIMOTICS S-1FL6伺服电机。
2.2 系统构成SINAMICS V90伺服驱动器与PLC连接起来,Q0.1与PTIA_24P相连,Q0.2与PTIB_24P 相连,Q0.4与EMGS相连,Q0.5与SON相连,Q0.6与RESET相连,SINAMICS V90伺服驱动器与SIMOTICS S-1FL6伺服电机连接。
2.3 控制程序的设计要求现对上述系统提出控制要求:伺服电动机驱动滚珠丝杆,滚珠丝杆螺距为6mm,机械减速比为1,脉冲当量为1um/p,伺服电机带增量编码器分辨率为10000。
伺服参数设置很重要(位置控制模式、速度控制模式、力矩控制)
伺服参数设置很重要(位置控制模式、速度控制模式、力矩控制)伺服在自动化设备的组成中占有重要地位。
伺服是在其额定转速范围内,属于恒力矩输出。
且本身具有多种反馈调节,用来保证伺服的运行精度以及输出力矩的精度。
全功能的伺服控制器拥有3多种控制模式,每种控制模式的控制方法也不一样,那么我们在不同的控制模式下,应该如何接线,又应该怎样调试其参数呢?1:位置控制模式,这是我们最常用的伺服控制模式,我们可以利用伺服控制器控制伺控制伺服走不同的工作位置,想要达到控制要求,我们就需要了解其硬件接线以及其相应的参数调试。
位置控制接线图根据接线图我们可以看出,伺服的功能强大,拥有很多引脚,很多功能。
但是我们可以根据自己的需求,只接其中的部分引脚即可。
(其中7号引脚需接12~24v,41号引脚和29号引脚短接到0v,必须要接的)然后如果我们用PLC对伺服进行控制,若是我们接的3,4,5,6号引脚,则我们需要将3号和5号引脚短接到24v,4号和6号引脚串接2KΩ的电阻后分别接到PLC的脉冲输出和方向输出端子上。
如果我们用的是1,4,2,6号引脚,则我们不需要串电阻即可。
那么接好线后,我们需要更改伺服的哪些参数呢?位置控制参数调节参数的设置,小伙伴们可以参考一下伺服的综合手册。
2:速度控制模式,此模式使用较少,此种模式,伺服控制器的功能相当于一个变频器,能够用模拟量对伺服的运行速度进行控制,其硬件接线图如下图所示:速度控制接线图此种控制模式下,(其中7号引脚需接12~24v,41号引脚和29号引脚短接到0v,必须要接的),我们可以将0~10v的电压接到14以及15号引脚上,设置好相关参数之后,我们就可以通过改变0~10v 的电压来控制电机的运行速度,其中有一点要注意,我们可以将电压变为0v用来停止电机的运行,但是通常情况下,模拟量不会完全为0,因此我们可以控制26号引脚,通过接通26号引脚,将伺服停止。
想要使用此功能,需要对Pr315设置,将其值改为1后,保存到驱动器中即可。
FB284控制V90伺服的位置控制下的位置和速度实时改变方法(绝对实用)
FB284控制V90伺服的位置控制下的位置和速度实时改变方法(绝对实用)S7-1200/S7-1500通过FB284控制V90伺服的位置控制时,很多场合我们需要随时改变位置或者随时改变速度的控制。
比如以下例子:1,对V90伺服走绝对定位,需要绝对位置,首先走到绝对位置100MM,然后到达后马上走到绝对位置500MM,然后走到绝对位置150MM,等等。
2,需要实时改变速度,比如伺服在往绝对位置500MM行进中,而速度通过外部随时在更改,比如以10MM/S,根据要求要改成11MM/S,12MM/S,15MM/S。
3,伺服正在往绝对位置800MM行走中,此时改变目标为绝对位置300MM,伺服迅速放弃800MM的位置指令,立即往300MM位置行走。
如果更改了速度,速度也随之改变。
以上很多场合都会用到,常规的做法是利用新的EXECUTE上升沿来覆盖原来的指令。
这很麻烦,比如速度实时改变的场合。
怎么做才能快速有效的达到上述要求呢?其实很简单。
先上一张图:这个是FB284功能块的相关引脚解释,其中对ConfigEPOS这个字有上图的说明,图中说明将第8位置1,就可以激活V90的连续设定点功能。
那么在程序中我们调用FB284之前,先把这个位一直置1,即ConfigEPOS.X8=1即可。
这样在调用FB284功能时,Execute只要在程序中触发并一直为1即可,我们需要改变位置或者速度,只需要对Postion和Velocity这两个随时进行更改就可以实现位置和速度的实时改变。
比如第一次写入Postion的值是500MM的转化值,也就是说伺服走到500MM,如果你改变了这个值,伺服马上就会更新,走到你的新的值,比如此时你设定是800MM的转化值,此时伺服就会直接走到800,同理,Velocity一旦改变,也会马上执行新的速度。
其实这个功能,用MODBUS控制V90伺服也是一样,也是可以实时改变的。
另外关于FB284回原点,如何判断伺服回原点已经完成了呢?看下图:。
西门子S7-1200对V90伺服进行位置控制的三种方法(一)
西门子S7-1200对V90伺服进行位置控制的三种方法(一)S7-1200系列PLC通过PROFINET与V90 PN伺服驱动器搭配进行位置控制,实现的方法主要有以下三种:· 方法一、在PLC中组态位置轴工艺对象,V90使用标准报文3,通过MC_Power、MC_MoveAbsolute等PLC Open标准程序块进行控制, 这种控制方式属于中央控制方式(位置控制在PLC中计算,驱动执行速度控制)。
· 方法二、在PLC中使用FB284(SINA_POS)功能块,V90使用西门子111报文,实现相对定位、绝对定位等位置控制,这种控制方式属于分布控制方式(位置控制在驱动器中计算)。
· 方法三、在PLC中使用FB38002(Easy_SINA_Pos)功能块,V90使用西门子111报文,此功能块是FB284功能块的简化版,功能比FB284少一些,但是使用更加简便。
V90 PN配置要点· 对于方法一:设置控制模式为'速度控制(S)',配置通信报文为标准报文3· 对于方法二或三:设置控制模式为'基本定位器控制(EPOS)',配置通信报文为西门子报文111· V90在线后点击'设置PROFINET->配置网络',设置V90的IP地址及设备名称:注意:设置的设备名称一定要与1200项目中配置的相同。
参数保存后需重启驱动器才能生效。
方法一使用标准报文3和工艺对象V90 PN与PLC采用PROFINET RT通信方式并使用报文3,项目步骤如下:1. 创建项目后,添加新设备S7-1200 PLC2. 在网络视图中添加V90 PN设备(使用GSD)2. 建立V90 PN与PLC的网络连接,并分别设置S7-1200及V90 PN的IP地址及设备名称:3. 在设备视图中为V90配置标准报文3'驱动器'选择'PROFIdrive' :配置轴的驱动,选择连接到PROFINET总线上的V90 PN:可以手动设置参考转速及最大转速,也可以选择'自动传送设备中的驱动装置参数'。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V90伺服应用之内部设定位置模式
内部设定值位置控制模式(IPos)p29003=1
• 1 断开主电源。
• 2 将伺服驱动断电,并使用信号电缆将其连接至控制器(例
如,SIMATIC S7-200 SMART)。
为确保正常运行,数字量信
号 CWL、CCWL 和EMGS 必须保持在高电平(1)。
• 3 打开 DC 24 V 电源。
• 4 检查伺服电机类型。
• • 如果伺服电机带有增量编码器,请输入电机ID(p29000)-46
• • 如果伺服电机带有绝对编码器,伺服驱动可以自动识别
伺服电机。
• 5.设置P29003=1脉冲位置控制模式(必须在使能关闭状态
修改,默认p29003=0)。
• 6 保存参数并重启伺服驱动以应用内部设定位置控制模式
的设定。
• 7 、通过参数 p29247、p29248 和 p29249 设置机械齿轮
比。
p29247:LU 负载每转;p29248:负载转数; p29249:电机转数
• 8 、通过设置参数 p29245 选择轴类别。
若使用模态轴,
则需通过设置参数 p29246 定义模态取值范围。
p29245 = 0:
线性轴p29245 = 1:模态轴
• 9 、通过参数 p29241 检查并选择定位模式。
• 当选择线性轴时,存在两种定位模式:p29241=0:增量
p29241=1:绝对
• 当选择模态轴时,存在四种定位模式:p29241=0:增量
p29241=1:绝对
p29241=2:绝对,正向(仅适用于带模校正的旋转轴)
p29241=3:绝对,负向(仅适用于带模校正的旋转轴) • 10、 根据实际机械结构配置内部位置设定值(p2617[0] 至
p2617[7] 以及 p2618[0] 至p2618[7])。
• 11 、设置扭矩限值和转速限值。
• 12 、通过设置下列参数来配置必要的数字量输入信号。
• 出厂设置如下:
• p29301[1]: 1 (SON) p29302[1]: 2 (RESET)
• p29303[1]: 3 (CWL) p29304[1]: 4 (CCWL)
• p29305[1]: 5 (G-CHANGE) p29306[1]: 6 (P-TRG)
• p29307[1]: 21 (POS1) p29308[1]: 22 (POS2) • 说明:如果使用增量编码器,则必须根据所选的回参考点
方式配置数字量输入信号 REF 或SREF。
• 13 、检查编码器类型并执行回参考点操作:回参考点模式
• ● p29240=0通过数字量输入信号 REF 设置回参考点 • ● p29240=1外部参考点挡块(信号 REF)和编码器零脉冲
• ● p29240=2仅编码器零脉冲
• ● p29240=3外部参考点挡块(信号 CWL)和编码器零脉冲
• ● p29240=4外部参考点挡块(信号 CCWL)和编码器零脉冲
• 如伺服驱动带绝对编码器,共计五种回参考点模式可用:也可以通过 BOP 功能"ABS"调整绝对编码器(虚拟参考点)一旦使用“ABS”功能,该四种回零方式将不再生效。
• 设置回参考点的前提。
• 伺服电机必须处于伺服开启状态且保持静止状态。
• 信号 REF 在以下情况下必须是 OFF 状态:
• – 上电前。
• – 从另一个回参考点模式切换到该模式时。
• – 从另一种控制模式切换到内部设定值位置控制模式时。
• 1.通过数字量输入信号 REF 设置回参考点(p29240=0) • 该模式只需要将信号 REF 接通,感应到上升沿时,当前位置设为零,伺服不会有任何动作,类似smart建立虚拟参考点,伺服驱动回参考点模式如下:
• 2.外部参考点挡块(信号 REF)和编码器零脉冲(p29240=1)• 回参考点由信号 SREF 触发。
然后,伺服驱动加速到 p2605 中指定的速度来找到参考点挡块。
搜索参考点挡块的方向(CW 或 CCW)由 p2604 定义。
当参考点挡块到达参考点时(信号 REF:0→1),伺服电机减速到静止状态。
然后,伺服驱动再次加速到 p2608中指定的速度,运行方向与 p2604 中指定的方向相反。
信号 REF(1→0)应该关闭。
达到第一个零脉冲时,伺服驱动开始向 p2600 中定义的参考点以p2611 中指定的速度运行。
伺服驱动到达参考点(p2599)时,信号 REFOK 输出。
关闭信号SREF(1→0),回参考点成功。
• ● p29240=2仅编码器零脉冲
• 由SREF触发,伺服以P2608的速度和P2604的方向到达第一个零脉冲时,再加载偏移量,完成后REFOK输出成功。
• P29240=3和4时,寻找参考点与1号模式类似,只是外部信号为CWL和CCWL。
• 14、 设置编码器脉冲输出。
• 编码器脉冲输出(PTO)(提供脉冲信号)可以将信号传输给控制器,从而在控制器侧实现闭环控制系统,或者将信号作为同步轴的脉冲输入设定值传输给另一驱动。
• 15、 通过 BOP 保存参数。
• 16 打开主电源。
• 17 清除故障和报警。
Fxxxxx为故障,必须应答,Axxxxx 为报警 消除原因自动复位。
• 18 将数字量信号 SON 置为高电平。
• 19 通过配置数字量输入 POS1、POS2 和 POS3 选择一个内部位置设定值,然后通过触发信号 PTRG开始定位。
• POS3 : POS2 : POS1
• 0 :0 :0:内部位置设定值 1(p2617[0])
• 0 :0 :1:内部位置设定值 2(p2617[1])
• 0 :1 :0:内部位置设定值 3(p2617[2])
• 0 :1 :1:内部位置设定值 4(p2617[3])
• 1 :0 :0:内部位置设定值 5(p2617[4])
• 1 :0 :1:内部位置设定值 6(p2617[5])
• 1 :1 :0:内部位置设定值 7(p2617[6])
• 1 :1 :1:内部位置设定值 8(p2617[7])
• 20 、内部设定值位置控制模式下的系统调试结束。