define_grid_motion的使用形式
FLUENT动网格需要的常用宏
FLUENT动网格需要的常用宏虽然瞬态PROFILE文件可以在一定程度上定义网格运动,然而其存在着一些缺陷。
最主要的一些缺陷存在于以下一些方面:(1)PROFILE无法精确的定义连续的运动。
其使用离散的点值进行插值。
如果想获得较为精确的运动定义,势必要定义很多点。
(2)一些情况下无法使用profile。
比如稳态动网格。
在FLUENT中定义网格运动,更多的是采用UDF宏。
fluent中与动网格有关的UDF 宏一共有5个,其中四个用于常规的网格运动定义,一个用于6DOF模型。
这些宏分别为:DEFINE_CG_MOTION、DEFINE_DYNAMIC_ZONE_PROPERTY、DEFINE_GEOM、DEFINE_GRID_MOTION、DEFINE_SDOF_PROPERTIES注意:动网格宏只能为编译型UDF。
1、DEFINE_CG_MOTION最常用的运动网格宏。
用户可以使用该宏定义每一时间步上的线速度或角速度来指定fluent中某一特定区域的运动。
DEFINE_CG_MOTION(name,de,vel,omega,time,dtime)参数说明:name:UDF的名字。
体现在fluent中表现为可选择的函数列表。
Dynamic_Thread *dt:存储了用户所指定的动网格属性和结构指针。
real vel[]:线速度。
vel[0]为x方向速度,vel[1]为y方向速度,vel[2]为z 方向速度real omega[]:角速度。
与线速度定义相同。
real time:当前时间。
real dtime:时间步长。
函数返回值为:void从函数的参数类型,配合c语言的参数调用方式可知,vel,omega为数值类型,属于传入类型。
因此只需在函数体中显式定义vel与omega即可将速度传入fluent求解器。
time与dtime是用于定义速度的。
详细实例可参看fluent udf 文档p182。
2、DEFINE_DYNAMIC_ZONE_PROPERTY该宏能用于以下一些场合:(1)在in-cylinder应用中定义旋转中心。
一段Fluent中动态网格的代码-2

f_node_loop (f, tf, n)
{
v = F_NODE (f, tf, n);
Message("Ori:f=%d,n=%d,NODE_X(v)=%g,NODE_Y(v)=%g\n",f,n,NODE_X(v),NODE_Y(v));
}
}
end_f_loop (f, tf);
}
DEFINE_GRID_MOTION(qi_wall_move, domain, dt, time, dtime)
{
Thread *tf,*t_sto;//取当前线的指针
face_t f,f_sto;//面
Node *v;//节点指针
Message(" C0 T: %g\n",T);//输出温度值
//side 0 的cell由F_C0(f,tf)求出,cell的Thread由THREAD_T0(tf)求出
//T=C_T(F_C1(f,tf),THREAD_T1(tf));//取side1的cell的温度
begin_f_loop (f, tf)
{
F_CENTROID(a_ga,f,tf);
dis=0;
min_dis=1E8;
begin_f_loop (f_sto, t_sto)
{
F_CENTROID(a_sto,f_sto, t_sto);
dis=sqrt((a_ga[0]-a_sto[0])*(a_ga[0]-a_sto[0])
Message("Ori:f=%d,n=%d,NODE_X(v)=%g,NODE_Y(v)=%g\n",f,n,NODE_X(v),NODE_Y(v));
(完整版)NACA0012翼型俯仰振荡实例进行讲解动网格

以NACA0012翼型俯仰振荡实例进行讲解动网格的应用过程;首先需要声明的是,这个例子也是来源于网络,原作者不详,在此向他表示感谢。
1、问题描述本例是想对作简谐振荡运动的NACA0012翼型的气动特性(升力系数,阻力系数和力矩系数)进行数值计算,来流速度为V,攻角的变化规律为:Alpha(t)=A/2*sin(omega*t)其中,A=10度,omega=10*pi 弧度/秒。
2、该例需要使用动网格来实现,首先需要编写刚体运动UDF实现翼型的俯仰运动,由于在FLUENT的UDF中只能指定速度,角速度;所以,需要将攻角对时间求导,得到转动角速度的规律:D(alpha)/dt=A*omega/2*cos(omega*t)编写的UDF在附件中。
3、由于本例只是为了讲述动网格的实现,至于其他方面的设置及分析就不再讨论;这里详细讲述下动网格的建立以及动网格的预览的结果。
步骤如下:1)将mesh文件读入到FLUENT中,Grid:check,scale…,Smooth/Swap…;Display Grid;2)定义求解器为,Define:pressure-based,2D,unsteady,Implicit,Green-Gauss Node Based(因本例使用的是三角形单元).3)编译UDF,Define->User-Defined->Functions->Complied…此时打开了Complied UDFs的窗口,Add…在选择UDF的对话框中找到NACA0012DM文件夹中的airfoil.c文件,选中,ok;此时返回到Complied UDFs的窗口点击Build,FLUENT开始进行编译,可以在FLUENT窗口看到编译的一些过程提示;等编译完成,点击Load;就将已经编译好的UDF加载到FLUENT中了。
4)定义动网格参数,Define->Dynamic Mesh(选勾,激活动网格模型)->Parameters…此时打开了Dynamic Mesh Parameters 窗口,在Models中只选取Dynamic Mesh,本例的网格类型为三角形单元,要实现的运动为小幅度的转动,因此选用的动网格更新方法为Smoothing+Remeshing;开始依次对这两种更新方法进行参数设定:Smoothing中的参数设定:Spring Constant Factor(弹簧倔强系数),该值设定为一个较小的值,在0.01到0.1之间,本例选取0.08;Boundary Node Relaxation(边界节点松弛),设定为0.5;Convergence Tolerance(收敛判据),保持默认的0.001;Number of Iterations(迭代次数),保持默认的20;Remeshing中的参数设定:为了得到较好的网格更新,本例在使用局部网格重新划分方法时,使用尺寸函数,也就是Remeshing+Must Improve Skewness+Size Function的策略。
动网格系列(一)
b = NV_DOT(rvec, axis);
NV_V_VS(Pp, =, origin, +, axis, *, b);
/*节点沿径向运动*/
NV_VV(dvec, =, NODE_COORD(v), -, Pp);
在动网格设置面板中,点击按钮【Create/Edit…】按钮,弹出动网格区域定义对话框。如图1-5、图1-6所示。
在图1-6所示面板中,设置Zone Names为fluid-cylinder,设置Type为User-Defined,在下方的Motion Attributes标签页中设置Mesh Motion UDF为scale_cyl::libudf,点击按钮【Create】创建动网格区域。
点击按钮【Load】加载UDF文件。如图1-2所示。
UDF加载成功后,input.txt文件内容将会被显示在命令窗口中。如图1-3所示。
图1-2编译UDF
图1-3input.txt文件内容
Step 4:设置网格运动及缩放圆柱区域
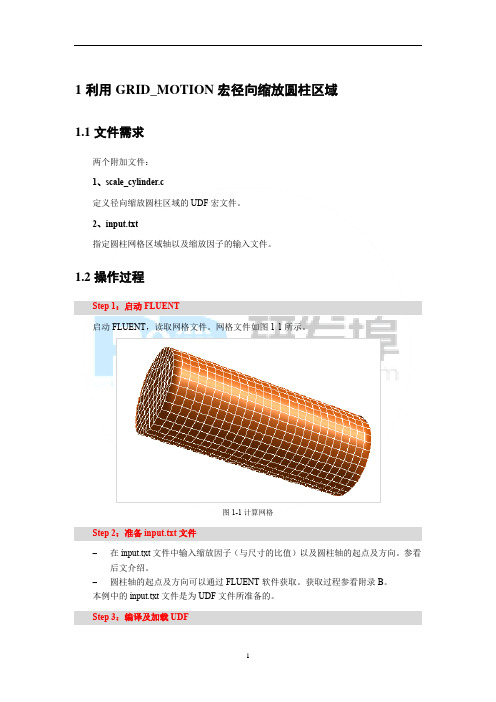
点击模型树节点【Dynamic Mesh】,在右侧面板中勾选【Dynamic Mesh】,本例不需要设置Mesh Methods,如图1-4所示。
{
v = C_NODE(c,tc,n);//取得节点
if (NODE_POS_NEED_UPDATE(v))
{
NODE_POS_UPDATED(v);
/* direction vector of node wrt origin of cylinder axis */
NV_VV(rvec, =, NODE_COORD(v), -, origin);
FLUENT操作过程及参数选择
振动流化床仿真操作过程及参数选择1创建流化床模型。
根据靳海波论文提供的试验机参数,创建流化床模型。
流化床直148mm,高1m,开孔率9%,孔径2mm。
在筛板上铺两层帆布保证气流均布。
因为实验机为一个圆形的流化床,所以可简化为仅二维模型。
而实际实验中流化高度远小于1m,甚至500mm,所以为提高计算时间,可将模型高度缩为500mm。
由于筛板上铺设两层帆布以达到气流均分的目的,所以认为沿整个筛板的进口风速为均匀的。
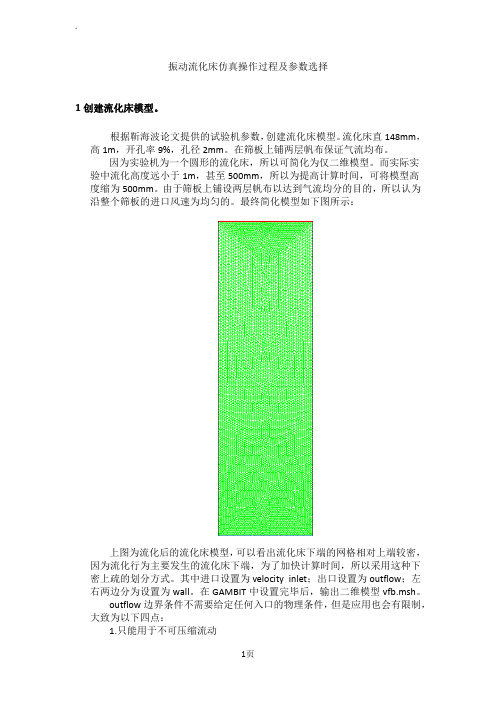
最终简化模型如下图所示:上图为流化后的流化床模型,可以看出流化床下端的网格相对上端较密,因为流化行为主要发生的流化床下端,为了加快计算时间,所以采用这种下密上疏的划分方式。
其中进口设置为velocity inlet;出口设置为outflow;左右两边分为设置为wall。
在GAMBIT中设置完毕后,输出二维模型vfb.msh。
outflow边界条件不需要给定任何入口的物理条件,但是应用也会有限制,大致为以下四点:1.只能用于不可压缩流动2.出口处流动充分发展3.不能与任何压力边界条件搭配使用(压力入口、压力出口)4.不能用于计算流量分配问题(比如有多个出口的问题)2打开FLUENT 6.3.26,导入模型vfb.msh点击GRID—CHECK,检查网格信息及模型中设置的信息,核对是否正确,尤其查看是否出现负体积和负面积,如出现马上修改。
核对完毕后,点击GRID-SCALE 弹出SCALE GRID窗口,设置单位为mm,并点击change length unit按钮。
具体设置如下:3设置求解器保持其他设置为默认,更改TIME为unsteady,因为实际流化的过程是随时间变化的。
(1)pressure based 求解方法在求解不可压流体时,如果我们联立求解从动量方程和连续性方程离散得到的代数方程组,可以直接得到各速度分量及相应的压力值,但是要占用大量的计算内存,这一方法已可以在Fluent6.3中实现,所需内存为分离算法的1.5-2倍。
Fluent使用指南2
Fluent使用指南2第一步:网格1、读入网格(File→Read→Case)2、检查网格(Grid→Check)3、平滑网格(Grid→Smooth/Swap)4、更改网格的长度单位(Grid→Scale)5、显示网格(Display→Grid)第二步:建立求解模型1、保持求解器的默认设置不变(定常)2、开启标准K-ε湍流模型和标准壁面函数Define→Models→Viscous第三步:设置流体的物理属性ari→Density→viscosity→第四步:设置边界条件对outflow、velocity-inlet、wall 采用默认值第五步:求解1、Solv→Controls→Solution中,Discretitation→Pressure→standardPressure→Momentum→2、Solution Initialization→all zone3、Residual Monitors→Plot第六步:迭代第七步:进行后处理第八步:1、Define→Model→Evlerian2、在Vissous Model→K-epsilon Multiphase Model→Mixture 第九步:在Define Phase Model→Discrete phase ModelInteraction↓选中→Interaction With Continuous Phase Nomber of Continuous PhaseInteractions per DPM Interaction第十步:设置物理属性第十一步:Define→Operating →重力加速度Define→Boondary Conditionsflvid→Mixture→选中Sovrce Terms 其他默认Phase-1→选中Sovrce Terms 其他默认Phase-2→选中Sovrce Terms 其他默认inflow→Mixture→全部默认Phase-1→全部默认Phase-2→Multiphase→Volume Fraction→其他默认outflow→Mixture→默认Phase-1→默认Phase-2→默认wall→Mixture→全部默认Phase-1→默认Phase-2默认第十二步:Slove→Controls→Slution Controls→Pressure→Momentum→其余默认第十三步:千万不能再使用初始化第十四步:进行迭代计算截Z轴上的图:在Surface→iso↓Surface of constant↓Grid↓然后选x、y、z轴(根据具体情况而定)↓在Iso-Values→选取位置C的设置在New Surface Name中输入新各字→点创建然后在Display→Grid→Edge type→Feature→选中刚创建的那个面,然后Display查看刚才那面是否创建对最后在Display→Contours→Options→Filled→Surface→选中面,然后Display。
离心泵CFD应用---Fluent计算
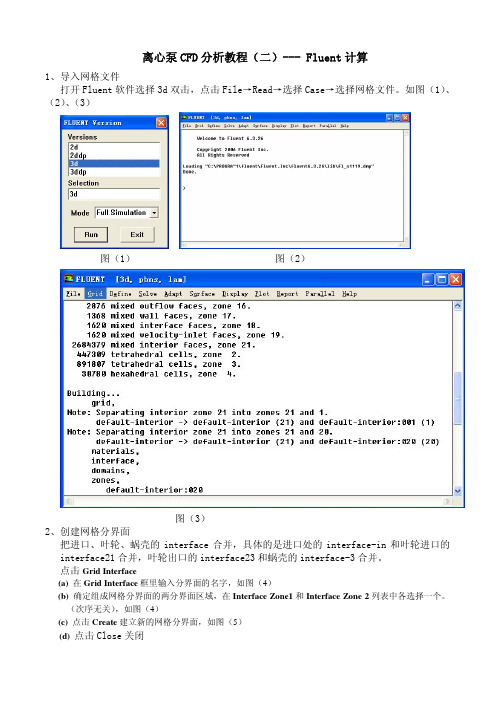
离心泵CFD分析教程(二)--- Fluent计算1、导入网格文件打开Fluent软件选择3d双击,点击File→Read→选择Case→选择网格文件。
如图(1)、(2)、(3)图(1) 图(2)图(3)2、创建网格分界面把进口、叶轮、蜗壳的interface合并,具体的是进口处的interface-in和叶轮进口的interface21合并,叶轮出口的interface23和蜗壳的interface-3合并。
点击Grid Interface(a) 在Grid Interface框里输入分界面的名字,如图(4)(b) 确定组成网格分界面的两分界面区域,在Interface Zone1和Interface Zone 2列表中各选择一个。
(次序无关),如图(4)(c) 点击Create建立新的网格分界面,如图(5)(d) 点击Close关闭图(4)图(5)注:1)创建网格分界面要在check网格之前,否则check网格时就会出错。
2)在创建网格分界面之后你会发现在Boundary Conditions里面多了四个边界(wall-13、wall-25、wall-27、wall-28),如图(6)图(6)3、check网格点击Grid → check,要留意如图(7)所示的volume statistics三项数据是否为正数,若为负数的话就要重新划分网格。
图(7)4、单位换算(scale Grid)点击Grid → scale Grid,在选择㎜,点击→,如图(8)图(8)5、平滑、交换网格点击Grid → Smooth/Swap Grid 如图(9)图(9)点击→,如图(10),继续→直到多次为零而止,如图(11)图(10) 图 (11)注:这对于非结构网格来说非常重要。
6、求解器设置点击Define→Modles→Solver,在Time下面选择steady(定常),点击OK,如图(12) 一般离心泵可选择定常,如果要测算瞬态流的话就要选择Unsteady图(12)7、湍流模型选择点击Define→Modles→Viscous Modle,选择k-epsilon(2kqn), 点击OK,如图(13)图(13)8、设置流体物性点击Define→Materials→右侧Fluent Database(如图14)→在Fluent Fluid Materials 里面选择Water-liquid(H2o<l>)(如图15),点击Copy→Close图(14).9、设置旋转单位点击Define→Units→angular-velocity→rpm→Close,如图(16)如图(16)10、设置运行条件点击Define→Operating Conditions→点击Gravity(重力)前面的小方块,在重力的作用坐标线上填上大小,负号表示重力的方向和坐标方向相反→点击OK在Operating Pressure可以设置参考压力,一般默认为一个大气压。
define_grid_motion的使用形式 -回复
define_grid_motion的使用形式-回复问题:define_grid_motion的使用形式define_grid_motion是一个功能强大的工具,用于定义和控制网格动画的移动。
它通常用于Web开发中,通过对元素的位置和动画进行精细控制,实现更流畅和吸引人的用户体验。
本文将详细介绍define_grid_motion的使用形式,并提供一步一步的指导。
第一步:安装和导入define_grid_motion库首先,确保你的项目已经安装了define_grid_motion库。
你可以通过在终端中运行以下命令来安装它:npm install define_grid_motion或者,你可以在HTML文件中使用script标签直接导入库的最新版本:html<script src="一旦库安装完毕,你就可以在你的代码中导入它。
javascriptimport { defineGridMotion } from 'define_grid_motion';第二步:创建一个容器元素来进行动画在HTML文件中,你需要创建一个用于显示动画的容器元素。
你可以使用任何HTML元素来作为容器,比如一个div元素。
html<div id="animation-container"></div>第三步:定义和配置网格动画在你的JavaScript代码中,你需要定义和配置网格动画。
首先,获取容器元素的引用:javascriptconst animationContainer =document.getElementById('animation-container');接下来,创建一个网格动画实例,并将它附加到容器上:javascriptconst gridMotion = new defineGridMotion(animationContainer);现在你可以开始定义和配置动画了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
define_grid_motion的使用形式
define_grid_motion是一个常用的物理模型,用于描述物体的运动轨迹。
它基于格子模型,通过定义网格的坐标和速度,来模拟物体的运动。
在许多科学计算和工程应用中,define_grid_motion模型被广泛使用。
一、使用形式
1. 定义网格
首先需要定义网格的坐标,通常使用一组离散的点来表示网格。
这些点可以是二维或三维空间中的任意位置,具体取决于问题的性质。
在定义网格时,需要指定每个点的坐标和相应的索引。
2. 定义速度
速度是物体运动的属性之一,通常表示为每个网格点的加速度。
在define_grid_motion模型中,需要为每个网格点定义一个速度向量,表示该点的运动方向和速度大小。
速度向量通常是一个三维向量,对应于每个方向上的加速度。
3. 定义运动方程
根据牛顿运动定律,每个网格点的运动都受到重力和其他力的作用。
在define_grid_motion模型中,需要定义这些力的作用方式,并建立相应的运动方程。
通常需要指定重力方向、大小和其他力的作用方式,以及它们如何影响每个网格点的速度。
4. 模拟运动
在定义了网格、速度和运动方程之后,可以使用模拟工具来模拟物体的运动。
通常需要设定一定的时间步长,并在每个时间步长内更
新每个网格点的速度和位置。
通过重复这个过程,可以模拟物体的长时间运动轨迹。
二、常见应用场景
define_grid_motion模型在许多领域都有应用,包括但不限于:
1. 流体动力学模拟:在流体动力学模拟中,可以使用
define_grid_motion模型来模拟流体运动。
通过定义网格和速度,可以模拟流体在不同条件下的流动行为,如湍流、流体绕过障碍物等。
2. 粒子系统模拟:在粒子系统模拟中,可以使用
define_grid_motion模型来描述大量粒子的运动轨迹。
通过定义每个粒子的速度和位置,可以模拟粒子之间的相互作用和演化过程。
3. 结构力学模拟:在结构力学模拟中,可以使用
define_grid_motion模型来模拟结构在不同载荷条件下的变形和应力分布。
通过定义网格和材料属性,可以模拟结构的动态响应和稳定性。
4. 地质力学模拟:在地质力学模拟中,可以使用
define_grid_motion模型来模拟地壳的运动和变形。
通过定义网格和地震波传播特性,可以模拟地震的发生、传播和影响范围。
三、总结
define_grid_motion是一种常用的物理模型,用于描述物体的运动轨迹。
它基于格子模型,通过定义网格的坐标和速度来模拟物体的运动。
在许多科学计算和工程应用中,define_grid_motion模型被广泛使用。
它适用于流体动力学模拟、粒子系统模拟、结构力学模拟和地质力学模拟等多种领域。