sobel算子边缘检测
图像识别中的轮廓提取算法探索(七)

图像识别中的轮廓提取算法探索引言:图像识别技术如今已经广泛应用于各个领域,其关键之一就是图像中的轮廓提取算法。
轮廓提取的准确与否直接影响到图像识别的效果。
本文将探索图像识别中常用的轮廓提取算法,并对其原理和优缺点进行分析。
一、边缘检测算法边缘检测是图像处理中最基础的一步,是进行轮廓提取的前提。
常用的边缘检测算法有Sobel算子、Laplacian算子和Canny算子等。
1. Sobel算子Sobel算子是一种基于梯度的边缘检测算法,其原理是通过计算每个像素点的梯度值来判断其是否为边缘点。
然后根据梯度值的大小确定边缘的强度,进而提取轮廓。
Sobel算子的优点是计算简单,对噪声鲁棒性强。
但其缺点也较为明显,容易产生边缘断裂的情况,并且对角线边缘检测效果较差。
2. Laplacian算子Laplacian算子是一种基于二阶导数的边缘检测算法,其原理是通过计算图像中每个像素点的二阶导数来判断其是否为边缘点。
Laplacian算子的优点是能够检测出边缘的交叉点,能够更精准地定位边缘。
但其缺点是对噪声比较敏感,容易产生误检。
3. Canny算子Canny算子是一种综合考虑多种因素的边缘检测算法,其原理是通过梯度计算、非极大值抑制和阈值处理来提取目标轮廓。
Canny算子的优点是能够提取清晰且连续的边缘,对噪声抑制效果好。
但其缺点是计算量较大,算法较为复杂。
二、区域生长算法区域生长算法是一种基于种子点的轮廓提取方法,其原理是在图像中选择若干个种子点,然后通过像素点之间的相似性判断来逐渐生长成为一个完整的区域。
区域生长算法的优点是能够提取出连续且相似的轮廓,适用于要求较高的图像识别任务。
但其缺点是对种子点的选择比较敏感,容易受到图像质量和噪声的影响。
三、边缘跟踪算法边缘跟踪算法是一种基于边缘连接的轮廓提取方法,其原理是通过追踪边缘点的连接关系,形成完整的轮廓。
边缘跟踪算法的优点是能够提取出精细的轮廓,并且对噪声抑制效果好。
几种常用边缘检测算法的比较

几种常用边缘检测算法的比较边缘检测是在数字图像上寻找图像亮度变化的过程,它对于图像处理和计算机视觉任务非常重要。
常见的边缘检测算法有Sobel算子、Prewitt算子、Roberts算子和Canny边缘检测算法。
本文将对这几种算法进行比较。
1. Sobel算子:Sobel算子是一种常见的边缘检测算法,它通过计算图像像素点与其邻域像素点之间的差异来检测边缘。
Sobel算子具有简单、快速的优点,可以检测水平和垂直方向的边缘,但对于斜向边缘检测效果较差。
2. Prewitt算子:Prewitt算子也是一种常用的边缘检测算法,它类似于Sobel算子,通过计算图像像素点与其邻域像素点之间的差异来检测边缘。
Prewitt算子可以检测水平、垂直和斜向边缘,但对于斜向边缘的检测结果可能不够精确。
3. Roberts算子:Roberts算子是一种简单的边缘检测算法,它通过计算图像像素点与其对角线方向上的邻域像素点之间的差异来检测边缘。
Roberts算子计算简单,但对于噪声敏感,容易产生干扰边缘。
4. Canny边缘检测算法:Canny边缘检测算法是一种经典的边缘检测算法,它包含多个步骤:高斯滤波、计算梯度、非最大抑制和双阈值处理。
Canny算法具有良好的边缘定位能力,并且对于噪声和细节边缘具有较好的抑制效果。
但Canny算法计算复杂度较高,在处理大规模图像时可能较慢。
综上所述,不同的边缘检测算法具有各自的优缺点。
若要选择适合应用的算法,需要综合考虑图像特点、计算复杂度和应用需求等因素。
如果对图像边缘的方向要求不高,可以选择Sobel或Prewitt算子;如果对图像边缘的方向要求较高,可以选择Canny算法。
另外,为了获得更好的边缘检测结果,通常需要进行适当的预处理,如灰度化、滤波和阈值处理等。
最后,对于不同的应用场景,可能需要使用不同的算法或算法组合来满足特定需求。
sobel边缘检测算法参数
Sobel边缘检测算法是一种离散微分算子,主要用于边缘检测。
该算法结合了高斯平滑和微分操作,因此具有强大的抗噪声能力。
在具体应用中,Sobel算子包括两组3*3的矩阵,左边的用于检测垂直边缘,右边的用于检测水平边缘。
在使用Sobel算子进行边缘检测时,可以设置不同的参数来控制算法的灵敏度。
主要的参数包括:
1. 图像深度(ddepth):指输入图像的深度。
2. 求导阶数(dx, dy):0表示这个方向上没有求导,取值为0、1。
3. Sobel算子的大小(ksize):即卷积核的大小,必须为奇数如1、3、5、7,默认为3。
如果ksize = -1,则使用3*3的Scharr算子。
4. 缩放导数的比例常数(scale):默认情况为没有伸缩系数。
5. 图像边界的模式(borderType):默认cv2.BORDER_DEFAULT。
Sobel边缘检测算子
经典边缘检测算子比较一各种经典边缘检测算子原理简介图像的边缘对人的视觉具有重要的意义,一般而言,当人们看一个有边缘的物体时,首先感觉到的便是边缘。
灰度或结构等信息的突变处称为边缘。
边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。
需要指出的是,检测出的边缘并不等同于实际目标的真实边缘。
由于图像数据时二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地方不一定能被检测出来,而检测出的边缘也不一定代表实际边缘。
图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。
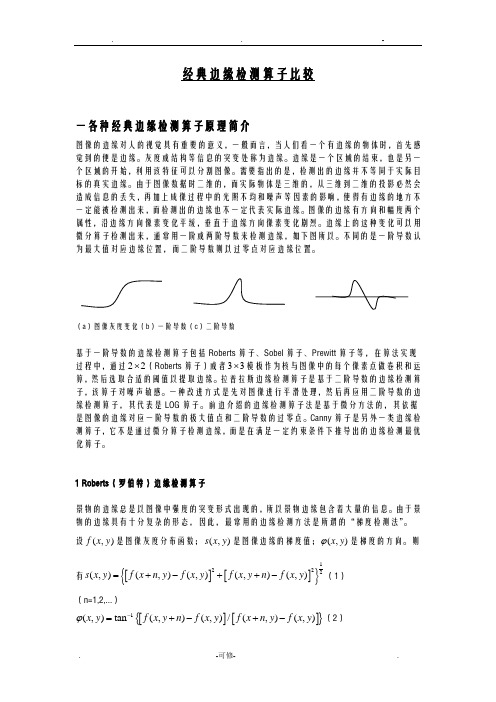
边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘,如下图所以。
不同的是一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。
(a )图像灰度变化(b )一阶导数(c )二阶导数基于一阶导数的边缘检测算子包括Roberts 算子、Sobel 算子、Prewitt 算子等,在算法实现过程中,通过22⨯(Roberts 算子)或者33⨯模板作为核与图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。
拉普拉斯边缘检测算子是基于二阶导数的边缘检测算子,该算子对噪声敏感。
一种改进方式是先对图像进行平滑处理,然后再应用二阶导数的边缘检测算子,其代表是LOG 算子。
前边介绍的边缘检测算子法是基于微分方法的,其依据是图像的边缘对应一阶导数的极大值点和二阶导数的过零点。
Canny 算子是另外一类边缘检测算子,它不是通过微分算子检测边缘,而是在满足一定约束条件下推导出的边缘检测最优化算子。
1 Roberts (罗伯特)边缘检测算子景物的边缘总是以图像中强度的突变形式出现的,所以景物边缘包含着大量的信息。
由于景物的边缘具有十分复杂的形态,因此,最常用的边缘检测方法是所谓的“梯度检测法”。
设(,)f x y 是图像灰度分布函数;(,)s x y 是图像边缘的梯度值;(,)x y ϕ是梯度的方向。
sobel算子边缘检测原理

sobel算子边缘检测原理Sobel算子是一种常用于边缘检测的算子。
它采用了离散微分算子的方法,通过计算像素点与其周围像素点的灰度差异来检测边缘。
边缘是图像中明显的灰度变化的地方,是图像中物体间的分界线。
边缘检测的目的就是找到图像中的这些边缘。
Sobel算子是基于图像的灰度梯度的计算来实现边缘检测的。
在图像中,像素点处的灰度值代表了其周围像素的强度值。
梯度是指一个函数在其中一点的变化率。
在图像处理中,梯度可以指的是图像灰度值的变化率。
Sobel算子通过计算像素点的灰度梯度来检测边缘。
Sobel算子的原理是通过对图像进行两次卷积操作来计算梯度。
一次卷积操作用于在水平方向上计算梯度,另一次卷积操作用于在垂直方向上计算梯度。
对于一个图像中的像素点A,它的灰度梯度可以通过以下公式计算得到:G = abs(Gx) + abs(Gy)其中,G是像素点A的灰度梯度,Gx是像素点A在水平方向上的梯度,Gy是像素点A在垂直方向上的梯度。
Sobel算子采用了以下两个3×3模板来进行卷积操作:水平方向上的Sobel算子模板:[-101-202-101]垂直方向上的Sobel算子模板:[-1-2-1000121]在进行卷积操作时,将模板分别与图像中的像素点进行对应位置上的乘法运算,并将结果相加得到像素点的梯度值。
这样就可以得到整个图像的灰度梯度图像。
通过计算像素点的灰度梯度,我们可以找到图像中的边缘。
边缘通常具有较大的梯度值,因为边缘上存在明显的灰度变化。
因此,我们可以通过设定一个阈值来筛选出图像中的边缘。
Sobel算子在实际应用中有一些优点。
首先,它是一种简单而高效的边缘检测方法。
其次,Sobel算子可以用来检测水平和垂直方向上的边缘,因此可以检测到更多的边缘信息。
此外,Sobel算子还可以通过调整模板的尺寸来适应不同大小图像的边缘检测需求。
然而,Sobel算子也存在一些缺点。
首先,Sobel算子对噪声比较敏感,可能会在噪声处产生较大的边缘响应。
sobel边缘检测算法

sobel边缘检测算法
Sobel边缘检测算法比较简单,实际应用中效率比canny边缘检测效率要高,但是边缘不如Canny检测的准确,然而在很多实际应用的场合,sobel边缘却是首选,Sobel算子是高斯平滑与微分操作的结合体,所以其抗噪声能力很强,用途较多。
尤其是在对效率要求较高,而对细纹理不太关系的时候。
使用Sobel算子提取图像边缘分3个步骤:
1.提取X方向的边缘,X方向一阶Sobel边缘检测算法为:
[ − 1 0 1 − 2 0 2 − 1 0 1 ] (1) \left[
−1−2−1000121−101−202−101
\right] \tag{1}⎣⎡−1−2−1000121⎦⎤(1)
2.提取Y方向的边缘,Y方向一阶Sobel边缘检测算法为:
[ − 1 − 2 − 1 0 0 0 1 2 1 ] (2) \left[
−101−202−101−1−2−1000121
\right] \tag{2}⎣⎡−101−202−101⎦⎤(2)
3. 综合两个方向的边缘信息得到整幅图像的边缘。
图像处理中的边缘检测算法研究与性能评估

图像处理中的边缘检测算法研究与性能评估引言:在当今数字图像处理领域,边缘检测一直是一个重要且挑战性的问题。
边缘提取是图像处理中的一项基本操作,对于目标检测、图像分割和图像识别等任务都具有重要意义。
边缘检测的目标是找到图像中明显的灰度跃变区域,以准确地确定物体的边缘位置。
本文将介绍几种常见的图像处理中的边缘检测算法,并对其性能进行评估。
一、经典边缘检测算法1. Sobel算子Sobel算子是一种基于差分的边缘检测算子,它结合了图像梯度的信息。
Sobel算子使用一个3×3的模板对图像进行卷积操作,通过计算水平和垂直方向上的梯度来找到边缘位置。
Sobel算子虽然简单,但在边缘检测中表现良好。
2. Prewitt算子Prewitt算子是另一种基于差分的边缘检测算子,与Sobel 算子类似,它也使用一个3×3的模板对图像进行卷积操作。
该算子通过计算水平和垂直方向上的梯度来检测边缘。
Prewitt 算子在边缘检测中也有较好的性能。
3. Canny边缘检测Canny边缘检测是一种广泛应用的边缘检测算法。
与Sobel 和Prewitt算子相比,Canny算法不仅能够检测边缘,还能够进行边缘细化和抑制不必要的边缘响应。
它通过多阶段的边缘检测过程,包括高斯滤波、计算梯度幅值和方向、非极大值抑制和双阈值处理等步骤,来提取图像中的边缘。
二、边缘检测算法的性能评估1. 准确性评估准确性是评估边缘检测算法好坏的重要指标。
在进行准确性评估时,可以使用一些评价指标,如PR曲线、F值等。
PR 曲线是以检测到的边缘像素为横坐标,以正确的边缘像素为纵坐标绘制的曲线,用于评估算法的召回率和准确率。
F值则是召回率和准确率的综合评价指标,能够综合考虑算法的检测效果。
2. 实时性评估实时性是边缘检测算法是否适用于实际应用的重要因素。
在实时性评估时,可以考虑算法的运行时间,以及算法对硬件资源的要求。
边缘检测算法应尽量满足实时性的要求,并能够在不同硬件平台上高效运行。
Sobel边缘检测

Sobel边缘检测Sobel算⼦:[-1 0 1-2 0 2-1 0 1]⽤此算⼦与原图像做卷积,可以检测出垂直⽅向的边缘。
算⼦作⽤在图像的第⼆列,结果是:200,200,200;作⽤在第三列,结果是:200,200,200;边缘 – 是像素值发⽣跃迁的地⽅(变化率最⼤处,导数最⼤处),是图像的显著特征之⼀,在图像特征提取、对象检测、模式识别等⽅⾯都有重要的作⽤。
Sobel算⼦和Scharr算⼦(1)Sobel算⼦:是离散微分算⼦(discrete differentiation operator),⽤来计算图像灰度的近似梯度,梯度越⼤越有可能是边缘。
Soble算⼦的功能集合了⾼斯平滑和微分求导,⼜被称为⼀阶微分算⼦,求导算⼦,在⽔平和垂直两个⽅向上求导,得到的是图像在X⽅法与Y⽅向梯度图像。
缺点:⽐较敏感,容易受影响,要通过⾼斯模糊(平滑)来降噪。
算⼦是通过权重不同来扩⼤差异。
梯度计算:(在两个⽅向求导,假设被作⽤图像为 I)⽔平变化: 将 I 与⼀个奇数⼤⼩的内核 Gx进⾏卷积。
⽐如,当内核⼤⼩为3时, Gx的计算结果为:垂直变化: 将 I 与⼀个奇数⼤⼩的内核 Gy进⾏卷积。
⽐如,当内核⼤⼩为3时, Gy的计算结果为:在图像的每⼀点,结合以上两个结果求出近似梯度:有时也⽤下⾯更简单公式代替,计算速度快:(最终图像梯度)。
(2)Scharr:当内核⼤⼩为3时, 以上Sobel内核可能产⽣⽐较明显的误差(毕竟,Sobel算⼦只是求取了导数的近似值)。
为解决这⼀问题,OpenCV提供了 Scharr 函数,但该函数仅作⽤于⼤⼩为3的内核。
该函数的运算与Sobel函数⼀样快,但结果却更加精确,不怕⼲扰,其内核为:(3)Sobel/Scharr提取边缘(求导)步骤:1)⾼斯模糊平滑降噪:GaussianBlur( src, dst, Size(3,3), 0, 0, BORDER_DEFAULT ); 2)转灰度:cvtColor( src, gray, COLOR_RGB2GRAY );3)求X和Y⽅向的梯度(求导):Sobel(gray_src, xgrad, CV_16S, 1, 0, 3);Sobel(gray_src, ygrad, CV_16S, 0, 1, 3);Scharr(gray_src, xgrad, CV_16S, 1, 0);Scharr(gray_src, ygrad, CV_16S, 0, 1);4)像素取绝对值:convertScaleAbs(A, B); //计算图像A的像素绝对值,输出到图像B5)相加X和Y,得到综合梯度,称为振幅图像:addWeighted( A, 0.5,B, 0.5, 0, AB); //混合权重相加,效果较差或者循环获取像素,每个点直接相加,效果更好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
源程序如下:#include<math.h>
#include <iomanip.h>
#include <stdlib.h>
#include <windows.h>
#include <stdio.h>
#include <stdlib.h>
#include <iostream.h>
#include <fstream.h>
#define ff(x,y) pBmpBuf0[256*(y)+(x)]
#define gg(x,y) pBmpBuf9[256*(y)+(x)]
//---------------------------------------------------------------------------------------
unsigned char *pBmpBuf;//读入图像数据的指针
int bmpWidth;//图像的宽
int bmpHeight;//图像的高
RGBQUAD *pColorTable;//颜色表指针
int biBitCount;//图像类型,每像素位数
//-------------------------------------------------------------------------------------------
//读图像的位图数据、宽、高、颜色表及每像素位数等数据进内存,存放在相应的全局变量中
bool readBmp(char *bmpName)
{
FILE *fp=fopen(bmpName,"rb");//二进制读方式打开指定的图像文件
if(fp==0) return 0;
//跳过位图文件头结构BITMAPFILEHEADER
fseek(fp, sizeof(BITMAPFILEHEADER),0);
//定义位图信息头结构变量,读取位图信息头进内存,存放在变量head中
BITMAPINFOHEADER head;
fread(&head, sizeof(BITMAPINFOHEADER), 1,fp); //获取图像宽、高、每像素所占位数等信息
bmpWidth = head.biWidth;
bmpHeight = head.biHeight;
biBitCount = head.biBitCount;//定义变量,计算图像每行像素所占的字节数(必须是4的倍数)
int lineByte=(bmpWidth * biBitCount/8+3)/4*4;//灰度图像有颜色表,且颜色表表项为256
if(biBitCount==8)
{
//申请颜色表所需要的空间,读颜色表进内存
pColorTable=new RGBQUAD[256];
fread(pColorTable,sizeof(RGBQUAD),256,fp);
}
//申请位图数据所需要的空间,读位图数据进内存
pBmpBuf=new unsigned char[lineByte * bmpHeight];
fread(pBmpBuf,1,lineByte * bmpHeight,fp);
fclose(fp);//关闭文件
return 1;//读取文件成功
}
//-----------------------------------------------------------------------------------------
//给定一个图像位图数据、宽、高、颜色表指针及每像素所占的位数等信息,将其写到指定文件中
bool saveBmp(char *bmpName, unsigned char *imgBuf, int width, int height,
int biBitCount, RGBQUAD *pColorTable)
{
//如果位图数据指针为0,则没有数据传入,函数返回
if(!imgBuf)
return 0;
//颜色表大小,以字节为单位,灰度图像颜色表为1024字节,彩色图像颜色表大小为0 int colorTablesize=0;
if(biBitCount==8)
colorTablesize=1024;
//待存储图像数据每行字节数为4的倍数
int lineByte=(width * biBitCount/8+3)/4*4;
//以二进制写的方式打开文件
FILE *fp=fopen(bmpName,"wb");
if(fp==0) return 0;
//申请位图文件头结构变量,填写文件头信息
BITMAPFILEHEADER fileHead;
fileHead.bfType = 0x4D42;//bmp类型
//bfSize是图像文件4个组成部分之和
fileHead.bfSize= sizeof(BITMAPFILEHEADER) + sizeof(BITMAPINFOHEADER) + colorTablesize + lineByte*height;
fileHead.bfReserved1 = 0;
fileHead.bfReserved2 = 0;
//bfOffBits是图像文件前3个部分所需空间之和
fileHead.bfOffBits=54+colorTablesize;
//写文件头进文件
fwrite(&fileHead, sizeof(BITMAPFILEHEADER),1, fp);
//申请位图信息头结构变量,填写信息头信息
BITMAPINFOHEADER head;
head.biBitCount=biBitCount;
head.biClrImportant=0;
head.biClrUsed=0;
head.biCompression=0;
head.biHeight=height;
head.biPlanes=1;
head.biSize=40;
head.biSizeImage=lineByte*height;
head.biWidth=width;
head.biXPelsPerMeter=0;
head.biYPelsPerMeter=0;
//写位图信息头进内存
fwrite(&head, sizeof(BITMAPINFOHEADER),1, fp);
//如果灰度图像,有颜色表,写入文件
if(biBitCount==8)
fwrite(pColorTable, sizeof(RGBQUAD),256, fp);
//写位图数据进文件
fwrite(imgBuf, height*lineByte, 1, fp);
//关闭文件
fclose(fp);
return 1;
}
void sobel(unsigned char *pBmpBufsobel);
void main(){
char readPath[]="C:\\Users\\Administrator\\desktop\\0.bmp";
readBmp(readPath);
sobel(pBmpBuf);
delete []pBmpBuf;
delete[]pColorTable;
}
void sobel(unsigned char *pBmpBufsobel){
unsigned char *pBmpBuf0;
unsigned char pBmpBuf9[256*256];
pBmpBuf0=pBmpBufsobel;
int i,j,vx=0,vy=0;
for (i=1;i<255;i++)
{for(j=1;j<255;j++)
{
vx=(ff(i-1,j-1)+2*ff(i-1,j)+ff(i-1,j+1))-(ff(i+1,j-1)+2*ff(i-1,j)+ff(i-1,j+1));
vy=(ff(i-1,j-1)+2*ff(i,j-1)+ff(i+1,j-1))
-(ff(i-1,j-1)+2*ff(i,j+1)+ff(i+1,j+1));
gg(i,j)=abs(vx)+abs(vy);
}
}
char writePath[]="C:\\Users\\Administrator\\desktop\\3.bmp"; saveBmp(writePath,pBmpBuf9,bmpWidth,bmpHeight,biBitCount,pColorTable);
}
运行前效果图:。