卫星导航定位基准站网数据处理基线重复性、相关表格、ITRF框架转换参数及其速率、欧拉矢量
ITRF框架间转换精度分析
测绘技术装备Geomatics Technolony anU Equipmevt Voi.22No.0 Dee.2420第22卷第4期202。
年12月ITRF框架间转换精度分析杨雄1龚川2,高智刚1(1.中国地震局第二监测中心,陕西西安710054;2.中国地震局地震研究所,湖北武汉433071)Accuracy Analysis of Coordinate Transforming between ITRF FrameworksK4NG Xiong,GONG⑴呃几,GAO Zhinang摘要:坐标框架是进行高精度测量的基础,为了实现不同坐标框架间的高精度快速转换,针对七参数法推导了程序化设计的转换公式,并自编程序实现程序化快速转换,通过实际算例验证其转换精度,同时系统地分析影响转换精度的因素。
结果表明,采用七参数转换法的转换精度在毫米级,最大误差不超过厘米级,符合坐标转换精度要求;不同框架间板块运动对转换精度影响较大,对于不同历元、不同框架之间的转换,历元对转换精度的影响大于框架的影响。
关键词:ITRF框架;坐标转换;七参数法;精度分析Keyworcls:ITRF Frameworo;Cooroinaiv Transformation;SnBdomPar M p S o U;Acchracc Analvsii;中图法分类号:P222.21引言地心四维参考框架[1-5],即国际地球参考框架(ITRF),是目前应用最广泛、精度最高的参考框架。
由于地球形状不断变化,随着各种大地测量技术的发展,为了更好地契合应用的协议地球参考系并尽可能与之接近,国际地球自转服务局每隔一定年限便会推出精度更高的ITRF框架版本[3],所有参考框架都包括站点位置和速度。
由于不同时期、不同框架下观测得到的坐标数据采用的坐标框架以及历元并不统一,在利用不同参考框架和不同时期的数据时,需要将其归算到同一框架、同一历元下才能进行数据处理,即对数据进行ITRF框架和历元间的转换。
GPS卫星导航定位技术与方法知识点总结
知识点总结的不容易一页一页总结的,用积分来换吧!第一章全球定位系统概论全球导航卫星系统GNSS目前包括全球定位系统GPS、俄罗斯的格罗纳斯系统GLONASS。
中国的北斗卫星定位系统COMPASS以及欧洲联盟正在建设的伽利略系统GALILEO GPS利用卫星发射无线电信号进行导航定位,具有全球、全天候、高精度、快速实时的三维导航、定位、测速和授时功能。
GPS主要由GPS(GPS卫星星座)空间部分、地面监控部分、用户接受处理部分组成,GPS地面监控部分有分布在全球的若干个跟踪站组成的监控系统组成,跟踪站被分为主控站、监控站和注入站。
GPS用户部分有GPS接收机、数据处理软件及相应的用户设备(如计算机气象仪)组成。
GPS实施计划共分三个阶段:第一阶段为方案论证和初步设计阶段。
从1973年到1979年,共发射了4颗试验卫星。
研制了地面接收机及建立地面跟踪网。
第二阶段为全面研制和试验阶段。
从1979年到1984年,又陆续发射了7颗试验卫星,研制了各种用途接收机。
实验表明,GPS定位精度远远超过设计标准。
第三阶段为实用组网阶段。
1989年2月4日,第一颗GPS工作卫星发射成功,宣告了GPS系统进入了工程建设阶段,这种工作卫星称为Block Ⅱ和BlockⅡA型卫星。
这两组卫星差别是:Block Ⅱ只能存储14天用的导航电文(每天更新三次);而BlockⅡA卫星能存储180天用的导航电文,确保在特殊情况下使用GPS卫星。
实用的GPS网即(21颗工作卫星+3颗备用卫星)GPS星座已建立,今后将根据计划更换失效的卫星。
GPS的特点:定位精度高、观测时间短、测站无需通视、可提供三维坐标、操作简便、全天候作业。
功能多,应用广GPS卫星信号包括测距码信号(即P码和C/A码信号)、导航电文(或称D码,即数据码信号)和载波信号。
GPS卫星的导航电文主要包括:卫星星历、时钟改正参数、电离层时延改正参数、遥测码,以及由C/A码确定P 码信号时的交接码等参数。
云南省2000国家大地坐标系坐标转换部分
相同历元不同框架坐标比较
相同历元不同框架点位坐标差异,下表以昆明站为例
IGS坐标
X(m)
Y(m)
Z(m) ΔX(m) ΔY(m) ΔZ(m)
ITRF2000
-1281255.473
5640746.079
2682880.117
-0.0318,-0.0024,-0.0203
ITRF2005
ITRF2000 ITRF2005
-1281255.565
5640746.060
2682880.057
IGS站坐标和速度场的解算精度
σ X(mm)
10
σY(mm) 22
σZ(mm) 12
1.0
1.0
1.0
-0.0317, 0.0035.-0.0147
σX1(mm) σY1(mm) σZ1(mm)
3.7 8.3 4.3 0.2 0.4 0.2
顾及全部7参数和椭球大小变化的转化公式又称为广义大地坐 标微分公式或广义变换椭球微分公式。
dB
- sinBcosL M+H
dL
=
-
(N
sinL + H)cosB
dH
cosBcosL
- sinBsinL M+H cosL
(N + H)cosB cosBsinL
cosB
M+H 0
sinB
T (t) T (tk ) T (t tk )
GPS C级网转换到CGCS2000 坐标系
从ITRF2000转换到以前框架的转换参数与速率(历元1997. 0)
转换参数
T1(cm) T2(cm) T3(cm)
Dppb
R1.001" R2.001" R3.001"
itrf2014至cgcs2000坐标转换方法研究及精度分析
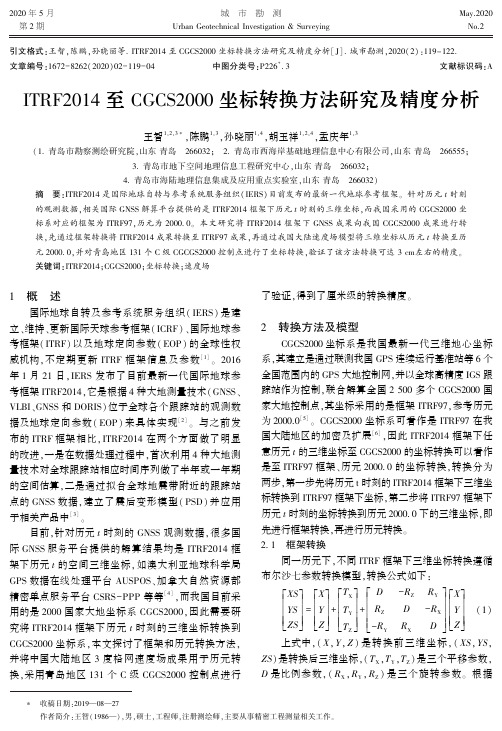
意历元 t 的三维坐标至 CGCS2000 的坐标转换可以看作
是至 ITRF97 框架、历元 2000 0 的坐标转换ꎬ转换分为
两步ꎬ第一步先将历元 t 时刻的 ITRF2014 框架下三维坐
标转换到 ITRF97 框架下坐标ꎬ第二步将 ITRF97 框架下
据及地球定向参数( EOP ) 来具体实现 [2] ꎮ 与之前发
布的 ITRF 框架相比ꎬITRF2014 在两个方面做了明显
的改进ꎬ一是在数据处理过程中ꎬ首次利用 4 种大地测
量技术对全球跟踪站相应时间序列做了半年或一年期
的空间估算ꎬ二是通过拟合全球地震带附近的跟踪站
点的 GNSS 数据ꎬ建立了震后变形模型( PSD) 并应用
2020 年 5 月
May.2020
城 市 勘 测
第2期
Urban Geotechnical Investigation & Surveying
No.2
引文格式:王智ꎬ陈鹏ꎬ孙晓丽等. ITRF2014 至 CGCS2000 坐标转换方法研究及精度分析[ J] . 城市勘测ꎬ2020(2) :119-122.
关键词:ITRF2014ꎻCGCS2000ꎻ坐标转换ꎻ速度场
1 概 述
了验证ꎬ得到了厘米级的转换精度ꎮ
立、维持、更新国际天球参考框架( ICRF) 、国际地球参
2 转换方法及模型
威机构ꎬ不定期更新 ITRF 框架信息及参数
ꎮ 2016
系ꎬ其建立是通过联测我国 GPS 连续运行基准站等 6 个
考框架 ITRF2014ꎬ它是根据 4 种大地测量技术( GNSS、
于相关产品中 [3] ꎮ
ITRF框架基准在高精度GPS测量中的统一
第22卷第6期孝感学院学报VO L.22 NO.6 2002年12月JOURNA L OF XIAOG AN UNIVERSITY DEC.2002 ITRF框架基准在高精度GPS测量中的统一余方达,郝国芳(孝感学院城建系,湖北孝感432100)摘 要:介绍了ITRF(国际地球参考框架)的建立及不同ITRF框架基准的转换关系,讨论了高精度G PS测量中地面点基准的转换。
关键词:ITRF;G PS;基准中图分类号:P208 文献标识码:A 文章编号:1671-2544(2002)06-0083-03 参考系统是为了表示位置坐标而定的类似于标尺作用的参照物。
例如,若将椭球体看作参照物,则椭球表面的经线、纬线、法线及相应刻度共同构成参考系统;若将3条笛卡儿坐标轴看作参照物,则坐标中心、坐标轴及其刻度共同构成参考系统。
在参考系统的具体实现中,不可能把椭球体或笛卡儿坐标这类人为定义的东西具体标出来,而只能代之以固定在地球上的一组标记及其坐标和其他一些参数间接地表示出来。
这组标记就是一个框架,换言之,框架就是参考系统的具体实现,例如,ITRF就是ITRS的具体实现[1]。
ITRF最初的实现是以BTS为基础(Boucher,Al2 tamini,1989)且其原点位于地球的质心但有10cm 的误差。
其方位与BTS一致。
1 ITRF框架的建立1.1 IERS国际地球自转服务IERS是ITRF的发布机构,IERS于1988年由国际大地测量学与地球物理学联合会和国际天文学联合会共同建立,用以取代BIH国际时间局的地球自转部分和原有的IPMS国际极移服务。
IERS 同时也是FAG S天文与地球物理数据分析服务联盟和成员之一。
根据创立时的委托协议,IERS的任务主要有以下几个方面:维持国际天球参考系统和框架, ICRS和ICRF维持国际地球参考系统和框架,即ITRS和ITRF为当前应用和长期研究提供及时准确的地球自转参数,即E OP’IERS采用了多种技术手段进行观测和分析,来完成对上述参考框架和地球自转的监测。
ITRF2008框架简介_成英燕
3
ITRF2008 站分布
ITRF2008 网站由 580 个站址的 934 站组成 ( 图 1) , 117 个在南半球。 其中 463 个在北半球, 包括装备 有目前运行的两个及以上技术手段的 84 个并置站, 84 个 并 置 站 中 除 了 提供各技术之间的 局 部 联 系。 Dionysos( 希 腊 ) 站 并 置 DORIS 和 移 动 的 SLR, Richmond( 弗吉尼亚州, SLR 和 美国 ) 并置 VLBI, DORIS 外, 其他所有的并置站都包括永久性 GPS [4 ] 站 。 VLBI, SLR 和 DORIS 并 置 站 比 较 少 ( 有 8 个 VLBISLR, 10 个 VLBIDORIS 和 10 个 SLRDORIS) , 无法将这 3 个独立技术进行可靠的综 GPS 在 ITRF 综合中起着很重要的作用, 合。 因此, 即 [5 ] GPS 与其他 3 个技术之间共 连接其他 3 个技术 。 137 个联系向量: 44 个联系 VLBI, 48 个联系 SLR, 45
1
引言
国际地球参考系统 ( ITRS) 由国际地球自转与
*
0916 收稿日期:2011基金项目:国家重大基础测绘项目 ( B2551 ) 1964 年生, 作者简介:成英燕, 女, 研究员, 主要研究方向: 大地测量及 GPS 数据处理. E - mail: yycheng@ casm. ac. cn
技术 中心
表1 Tab. 1
IAG 服务所提交的技术解情况
Technology solution submited by IAG
解类型 约束 不加 松驰 最小 最小 EOP 站
时间跨度
IVS 1980. 0 - 2009. 0 法方程 ILRS 1983. 0 - 2009. 0 IGS 1997. 0 - 2009. 5 IDS 1993. 0 - 2009. 0 方差与 协方差 方差与 协方差 方差与 协方差
ITRF2014框架下地面沉降GNSS数据处理方法研究
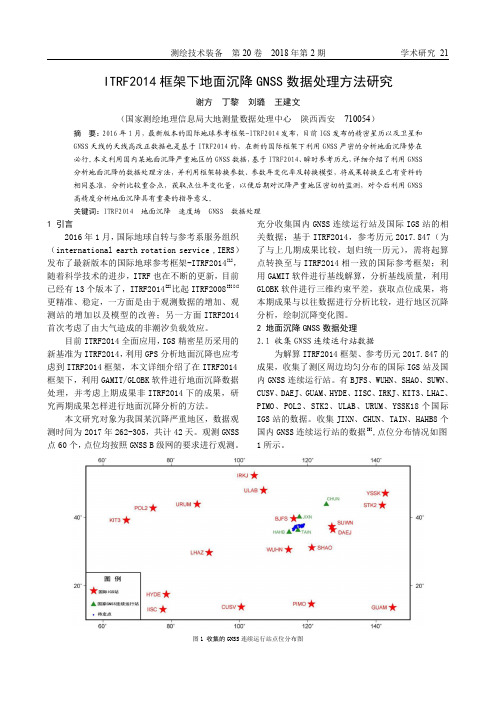
ITRF2014框架下地面沉降GNSS数据处理方法研究谢方丁黎刘璐王建文(国家测绘地理信息局大地测量数据处理中心陕西西安710054)摘要:2016年1月,最新版本的国际地球参考框架-ITRF2014发布,目前IGS发布的精密星历以及卫星和GNSS天线的天线高改正数据也是基于ITRF2014的,在新的国际框架下利用GNSS严密的分析地面沉降势在必行。
本文利用国内某地面沉降严重地区的GNSS数据,基于ITRF2014、瞬时参考历元,详细介绍了利用GNSS 分析地面沉降的数据处理方法,并利用框架转换参数、参数年变化率及转换模型,将成果转换至已有资料的相同基准,分析比较重合点,获取点位年变化量,以便后期对沉降严重地区密切的监测,对今后利用GNSS 高精度分析地面沉降具有重要的指导意义。
关键词:ITRF2014地面沉降速度场GNSS数据处理1引言2016年1月,国际地球自转与参考系服务组织(international earth rotation service,IERS)发布了最新版本的国际地球参考框架-ITRF2014[1],随着科学技术的进步,ITRF也在不断的更新,目前已经有13个版本了,ITRF2014[2]比起ITRF2008[3][4]更精准、稳定,一方面是由于观测数据的增加、观测站的增加以及模型的改善;另一方面ITRF2014首次考虑了由大气造成的非潮汐负载效应。
目前ITRF2014全面应用,IGS精密星历采用的新基准为ITRF2014,利用GPS分析地面沉降也应考虑到ITRF2014框架,本文详细介绍了在ITRF2014框架下,利用GAMIT/GLOBK软件进行地面沉降数据处理,并考虑上期成果非ITRF2014下的成果,研究两期成果怎样进行地面沉降分析的方法。
本文研究对象为我国某沉降严重地区,数据观测时间为2017年262-305,共计42天。
观测GNSS 点60个,点位均按照GNSS B级网的要求进行观测。
ITRF简介
ITRF站点坐标用大地坐标形式表示时推荐采用全球通用
的GPS的大地测量基本常数目前采用的GRS 80是 IUGG1979年推荐的,其椭球参数为:
a=6378137m α = 1:298.257 GM=3.986005*10^14 m^3s^-2 ω =7.2921115*10^-5 rad*s^-1
,计算时 大多给这些站很强的约束,这样建立的坐标系 应与ITRF有很好的一致性
国际大地参考框架
• 台站网的解通过内约束或者固定若干台站的坐标和速
度连到国际大地参考框架,解的时间序列可表为:
X(t) X 0 V (t t 0 ) X i (t)
i
X0 : 参考历元的台站位置 V : 线性运动速度
国际大地参考系(ITRF)简 介
国际大地参考框架
是迄今为止现行最适宜的参考框架。
融合了各种大地空间测量技术的力量。
比任何独立的参考框架都更为精准。 将ITRF作为共用的GNSS参考框架有利于框架的共考框架和ITRF参考框架易
于结合。
据我所知:GNSS参考框架已经与ITRF有了联系。 GNSS参考框架应该考虑到测站速度。
ITRF与IGS(国际GPS服务)
关系: ITRF为IGS提供绝对的长期基准
IGS提供全球GPS观测数据并改进ITRF解
ITR和维持地区性大地坐标系 中的作用
1、地区坐标系建立时用到了IGS的精密星历和地球定向
参数EOP,而IGS精密星历的参考框架是属于ITRF的
2、地区坐标系建立所用的起始站为ITRF框架中的站点
国际大地参考框架
国际大地参考框架是由IERS机构负责监测的对ITRS实现的
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附 录 A (规范性附录) 基线重复性
A.1 重复性定义
重复性定义见公式A.1:
()2
11
21
2211⎥⎥⎥⎥
⎥⎦
⎤⎢⎢⎢⎢⎢
⎣
⎡-•-=∑∑==n
i C n i C m i i
i C C n n R σσ ........................... (A.1) 式中:
n ——同一基线的总观测时段数;
i C ——一个时段的基线某一分量或边长;
2i C σ——该时段i 相应于i C 分量的方差;
m C ——各时段的加权平均值。
附录 B
(资料性附录)
数据处理相关表格
B.1 基准站测站信息表
表B.1给出了基准站测站信息的示例。
表B.1 测站信息表
B.2 数据质量分析统计表
数据质量分析统计表见表B.2
表B.2 数据质量分析统计表
附 录 C (资料性附录)
ITRF 框架转换参数及其速率
C.1 转换参数符号表示及单位
表C.1规定了转换参数的符号表示及单位。
表C.1 转换参数符号表示及单位
t 毫米/年(mm/y )
10 /年(ppb/y)
毫角秒/年(0.001"/y)
C.2 从ITRF 框架转参数与速率
表C.2~C.4规定了ITRF 框架的转换参数与速率。
表C.2 从ITRF2000转换到以前框架的转换参数与速率
x y T
z x y R
z 6.7 6.1 -18.5 1.55 0.00 0.00 0.00 1997.0
表C.3 ITRF2005转换到 ITRF2000的转换参数与速率
x T y T
z T x R y R
z R 0.1 -0.8 -5.8 0.40 0.000 0.000 0.000 表C.4 ITRF2008转换到以前框架的转换参数与速率
x y T
z T x y R z -2.0 -0.9 -4.7 0.94 0.00 0.00 0.00 2000.0
附 录 D (资料性附录) 欧拉矢量
D.1 测站速度计算
⎥⎥⎥
⎦
⎤
⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣
⎡ΩΩ-Ω-ΩΩΩ-=⎥⎥⎥⎦⎤⎢⎢⎢⎣
⎡Z Y X V V V X
Y X Z Y Z
Z Y X 000.......................... (D.1)
式中:
X V 、Y V 、Z V ——计算的速度值分量;
X 、Y 、Z ——测站坐标;
X Ω、Y Ω、Z Ω
——测站所在板块欧拉矢量,取值见表D.1。
表D.1 CPM- CGCS2000 20个板块欧拉矢量及板块拟合误差表
表D.1 (续)。