第三章神经网络控制及应用(基础)
神经网络原理及应用
神经网络原理及应用随着科技的不断进步,人们对于人工智能的热情也日趋高涨。
人工智能有很多种算法,其中神经网络是最为基础且应用最广泛的一种。
一、神经网络的原理神经网络是一种模拟人脑神经元的计算模型,它是由大量的神经元和它们之间的连接构成的。
每个神经元都有自己的输入和输出,这些输入通过一系列的“权重”给定了输入的影响程度,神经元通过函数将这些带权输入求和并送入输出函数得到输出。
其中,输入函数有不同的表现形式,一般来说,是将输入加权和的结果送入激活函数中,以输出神经元的值。
激活函数有很多种,常见有sigmoid函数、ReLU函数、tanh函数等。
而连接权重是神经网络中的一个非常重要的概念,它决定了神经元间的传递强度和方向。
在训练神经网络时,我们通常使用反向传播算法,根据训练数据来不断调整连接权重,以找到最小化损失函数的权重。
二、神经网络的应用神经网络有着广泛的应用,其中最为突出的有以下几个:1、图像识别神经网络可以对图像进行识别,这在计算机视觉和人机交互领域有着非常重要的应用。
神经网络学习识别图像的主要过程是输入训练数据,进行误差预测,然后调整网络权重以提高预测准确率。
2、自然语言处理神经网络可以通过训练学会自然语言处理任务,如语音识别、机器翻译和情感分析等。
在这些任务中,神经网络可以归纳出与自然语言相关的语法、语义和上下文信息,从而提高自然语言处理的准确性和速度。
3、推荐系统神经网络可以利用用户的历史行为和其他信息来推荐符合用户利益的商品、视频和新闻。
在这方面,神经网络可以识别隐藏在用户行为背后的模式和信号,以便提供更加精确的推荐服务。
4、游戏智能神经网络可以在游戏中进行决策,自动控制角色,提供游戏智能服务。
在这些应用中,神经网络开始了进化学习算法,以提高角色行动的判断力和反应速度,从而更好地帮助玩家取得游戏胜利。
三、神经网络的未来神经网络在许多领域的发展都取得了非常突出的成果。
随着硬件技术的不断进步和数据规模的不断增长,神经网络的未来前景也是一片光明。
人工神经网络学习总结笔记
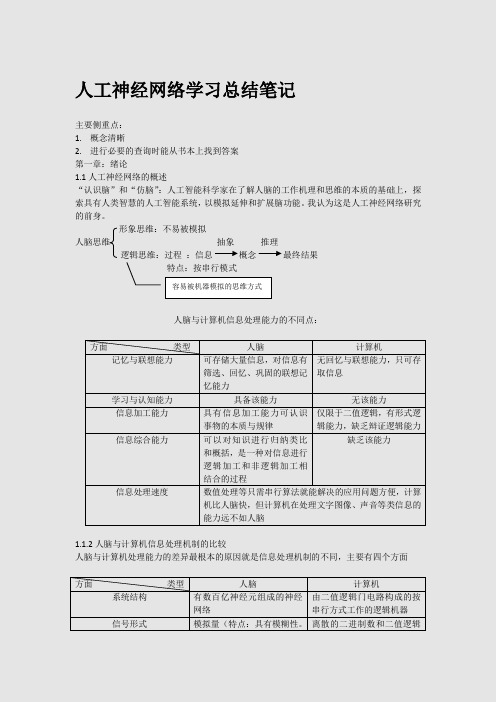
人工神经网络学习总结笔记主要侧重点:1.概念清晰2.进行必要的查询时能从书本上找到答案第一章:绪论1.1人工神经网络的概述“认识脑”和“仿脑”:人工智能科学家在了解人脑的工作机理和思维的本质的基础上,探索具有人类智慧的人工智能系统,以模拟延伸和扩展脑功能。
我认为这是人工神经网络研究的前身。
形象思维:不易被模拟人脑思维抽象推理逻辑思维:过程:信息概念最终结果特点:按串行模式人脑与计算机信息处理能力的不同点:方面类型人脑计算机记忆与联想能力可存储大量信息,对信息有筛选、回忆、巩固的联想记忆能力无回忆与联想能力,只可存取信息学习与认知能力具备该能力无该能力信息加工能力具有信息加工能力可认识事物的本质与规律仅限于二值逻辑,有形式逻辑能力,缺乏辩证逻辑能力信息综合能力可以对知识进行归纳类比和概括,是一种对信息进行逻辑加工和非逻辑加工相结合的过程缺乏该能力信息处理速度数值处理等只需串行算法就能解决的应用问题方便,计算机比人脑快,但计算机在处理文字图像、声音等类信息的能力远不如人脑1.1.2人脑与计算机信息处理机制的比较人脑与计算机处理能力的差异最根本的原因就是信息处理机制的不同,主要有四个方面方面类型人脑计算机系统结构有数百亿神经元组成的神经网络由二值逻辑门电路构成的按串行方式工作的逻辑机器信号形式模拟量(特点:具有模糊性。
离散的二进制数和二值逻辑容易被机器模拟的思维方式难以被机器模拟)和脉冲两种形式形式信息储存人脑中的信息分布存储于整个系统,所存储的信息是联想式的有限集中的串行处理机制信息处理机制高度并行的非线性信息处理系统(体现在结构上、信息存储上、信息处理的运行过程中)1.1.3人工神经网络的概念:在对人脑神经网络的基本认识的基础上,用数理方法从信息处理的角度对人脑神经网络进行抽象,并建立某种简化模型,称之为人工神经网络,是对人脑的简化、抽象以及模拟,是一种旨在模仿人脑结构及其功能的信息处理系统。
其他定义:由非常多个非常简单的处理单元彼此按某种方式相互连接而形成的计算系统,外部输入信息之后,系统产生动态响应从而处理信息。
深度学习原理与TensorFlow实践 第3章 神经网络
深度学习原理与Tensorflow实践
生物神经元
3.3
神经网络基础知识—MP模型
深度学习原理与Tensorflow实践
MP模型示意图
3.4
神经网络基础知识—MP模型
深度学习原理与Tensorflow实践
3.5
神经网络基础知识—MP模型
深度学习原理与Tensorflow实践
3.6
神经网络基础知识—感知机
3.9
神经网络基础知识—梯度下降法
梯度是一个向量(矢量),表示某一函数在该点处的方向导数沿着该方向取得最大值,即函 数在该点处沿着该方向(此梯度的方向)变化最快,变化率最大。
深度学习原理与Tensorflow实践
3.10
神经网络基础知识—梯度下降法
深度学习原理与Tensorflow实践
3.11
深度学习原理与Tensorflow实践
3.14
神经网络基础知识—三层感知机
三层感知机神经网络。 其中 L1层是输入层, L2层是隐含层, L3层是输出 层。与两层感知机不同的是三层感知机神经网络增加了隐含层。
深度学习原理与Tensorflow实践
3.15
神经网络基础知识—万能逼近定理
Cybenko等于1989年证明了具有隐含层(最少一层)感知机神经网络 在激励函数(也称激活函数)为sigmoid函数的情况下具有逼近任何函数 的作用。Hornik 等在1991年更加证明激励函数为任何非常数函数的情 况同样适用。这就是著名的万能逼近定理(universal approximation theorem)。也就是一个仅有单隐藏层的神经网络, 在神经元个数足够 多的情况下,通过非线性的激活函数,足以拟合任意函数。
神经网络控制基础人工神经网络课件ppt课件

其他工业领域应用案例
电力系统
神经网络控制可以应用于电力系统的负荷预测、故障诊断和稳定性 分析等方面,提高电力系统的运行效率和安全性。
化工过程控制
神经网络控制可以对化工过程中的各种参数进行实时监测和调整, 确保生产过程的稳定性和产品质量。
航空航天
神经网络控制在航空航天领域的应用包括飞行器的姿态控制、导航控 制和故障诊断等,提高飞行器的安全性和性能。
05 神经网络控制性能评估与优化
性能评估指标及方法
均方误差(MSE)
衡量神经网络输出与真实值之间的误差,值越小表示性能越好。
准确率(Accuracy)
分类问题中正确分类的样本占总样本的比例,值越高表示性能越好。
交叉验证(Cross-Validation)
将数据集分成多份,轮流作为测试集和训练集来评估模型性能。
强化学习在神经网络控制中应用
强化学习原理
通过与环境进行交互并根据反馈信号进行学习的方法,使神经网络能够自主学习 到最优控制策略。
强化学习算法
包括Q-learning、策略梯度等算法,用于求解神经网络控制中的优化问题,实现 自适应控制。
04 神经网络控制系统设计与实现
系统需求分析
功能性需求
明确系统需要实现的功能,如 数据输入、处理、输出等。
非监督学习
无需已知输出数据,通过挖掘输入数 据中的内在结构和特征进行学习,常 用于聚类、降维等任务。
深度学习在神经网络控制中应用
深度学习模型
通过构建深层神经网络模型,实现对复杂非线性系统的建模与控制,提高控制 精度和性能。
深度学习优化算法
采用梯度下降等优化算法对深度学习模型进行训练,提高训练效率和模型泛化 能力。
第3章 神经元、感知器和BP网络(1)
课程名:智能控制技术 2. 生物神经元工作状态
具有两种常规工作状态:兴奋与抑制。 当传入的神经冲动使细胞膜电位升高超过阈值时,细胞进入兴奋状态, 产生神经冲动并由轴突输出; 当传入的神经冲动使膜电位下降低于阈值时,细胞进入抑制状态,没 有神经冲动输出。
4
课程名:智能控制技术
二. 人工神经元模型 人工神经网络是利用物理器件来模拟生物神经网络的
课程名:智能控制技术
第三章 神经网络控制
神经网络是在生物功能启示下建立起来的一种数据处 理技术。它是由大量简单神经元互连而构成的一种计算结构, 在某种程度上模拟生物神经系统的工作过程,从而具备解决 实际问题的能力。
特点:
(1)非线性映射逼近能力。任意的连续非线性函数映射关系
可由多层神经网络以任意精度加以逼近。
下面介绍几种常见的网络结构: 1、 前向网络(前馈网络) 2、反馈网络
10
3.相互结合型网络
即网状结构,在这种神经 网络结构中,任何两个神经 元之间都可能双向联接。
课程名:智能控制技术
4.混合型网络
在前向网络基础上,在同层、 部分神经元之间也可双向联接。
11
课程名:智能控制技术
§3-2 监督学习及前馈神经网络
sgn(w1x1 w2 x2 T ) sgn(3x1 2x2 T )
根据题意:
x1 时: 3 5 T 0 得 T 2 x2 时: 12 12 T 0 得 T 0
x3 时: 38 T 0 得 T 5 为将样本按要求分两类, 5 T 2 ,根据题意选 T 3
8
课程名:智能控制技术
§3-1 神经网络的基本概念
3.1.1 神经元模型
一. 生物神经元模型 1、组成
前馈神经网络
§3.3 BP网d1络 d2
dr
dM
输输输输
误差反向传y1 播神y2经网络yr ,简yM称BP (Back
Propagation)网络,是一种单向传播输 输的输多层前向网络。 在模式识别、图像处理、系统辨识、函数拟合、优 化计算、最优预测和自适应控w制rk 等领域有输 着输 较为广
泛的应用。
则p=1,2,…,P;
21
3.1.3感知器的学习
(3)计算各节点的实际输出ojp(t)=sgn[WjT(t)Xp], j=1,2,...,m;
(4)调整各节点对应的权值,Wj(t+1)= Wj(t)+η[djp-ojp(t)]Xp, j=1, 2,…,m, 其中为学习率,用于控制调整速度,太大
会影响训练的稳定性,太小则使训练的收敛速度变慢,
入向量中第一个分量x0恒等于-1,权向量中第一个分量 为阈值,试根据以上学习规则训练该感知器。
24
3.1.3感知器的学习
解:第一步 输入X1,得 WT(0)X1=(0.5,1,-1,0)(-1,1,-2,0)T=2.5 o1(0)=sgn(2.5)=1
W(1)= W(0)+η[d1- o1(0)] X1
W(3)= W(2)+η[d3- o3(2)] X3
=(0.7,0.8,-0.6,0)T+0.1[1-(-1)](-1,-1,1,0.5)T =(0.5,0.6,-0.4,0.1)T
第四步 返回到第一步,继续训练直到dp- op=0,p=1,2,3。
27
3.1.4单层感知器的局限性
问题:能否用感知器解决如下问题?
x1
O
O
x2
28
3.1.4单层感知器的
神经网络在控制中的应用

1
28
角位移θ2 (rad)
1.2 0.8 0.4
0 -0.4 -0.8 -1.2
0
期望 RFNN
0.5
时间 t (Sec)
关节2的轨迹跟踪曲线
1
29
角位移θ1 (rad)
1.2 0.8 0.4
0 -0.4 -0.8 -1.2
0
期望 RFNNI
0.5
1
时间 t (Sec)
RNNI的第一个输出轨迹
期望轨迹:
1d (t) sin(2t)
d 2
(t)
cos(2t
)
摩擦项和扰动项 : F ( ) 0.5sign( )
Td
(
,
)
5 5
cos(5t) cos(5t)
27
角位移θ1 (rad)
1.2 0.8 0.4
0 -0.4 -0.8 -1.2
0
期望 RFNN
0.5
时间 t (Sec)
关节1的轨迹跟踪曲线
x2 y2 l12 l22 2l1l2 cos( 2 )
2
arccos
x2
y 2 l12 2l1l2
l22
,
0 2
Atny x
l22 x2 y2 l12 2l1 x2 y2 cos
arccos x2 y 2 l12 l22 , 0
2l1 x2 y 2
W (x, y)
W (k) J / W u p un / W
30
角位移θ2 (rad)
1.2
期望
0.8
RFNNI
0.4
0
-0.4
-0.8
-1.2
0
0.5
第三章神经网络控制及应用基础
类
〇
〇
反馈型网络
2019/9/16
31
3.1.3.3 人工神经网络的学习
神经网络能够通过对样本的学习训练, 不断改变网络的连接权值以及拓扑结构,以 使网络的输出不断地接近期望的输出。这一 过程称为神经网络的学习或训练,其本质是 可变权值的动态调整。
2019/9/16
32
3.1.3.2 人工神经网络模型
22
3.1.3.1 人工神经元模型
神 (1)阈值型转移函数
经 元
1 x≥0
f(x)=
的
0 x<0
转
f (x)
移
函
1.0
数
0
(3-7)
x
2019/9/16
23
3.1.3.1 人工神经元模型
神 (2)非线性转移函数
经
元 的
f
(
x)
1
1 e
x
(3-8)
1 ex f (x) 1 ex
型
n
o j (t 1) f {[ wij xi (t)] T j}
(3-2)
i 1
2019/9/16
20
3.1.3.1 人工神经元模型
n
神
netj (t) wij xi (t)
经
i 1
元
的
net’j=WjTX
数
学 Wj=(w1 w2 … wn)T
模 型
X=(x1 x2 … xn)T
人工神经网络是一种旨在模仿人脑结构及其功能 的信息处理系统。
2019/9/16
1
3.1.1神经网络的基本特征与功能
结构特征: 并行式处理 分布式存储 容错性
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
人工神经网络定义
神经网络是由多个非常简单的处理单元彼此按 某种方式相互连接而形成的计算系统,该系统是靠 其状态对外部输入信息的动态响应来处理信息的。
人工神经网络是一个由许多简单的并行工作的 处理单元组成的系统,其功能取决于网络的结构、 连接强度以及各单元的处理方式。
经 元 的
0 f(x)= cx
1
x≤0 0x<c<x≤x xc
f (x)
转
(3-9)
移
1.0
函
数
x
0
xc
2021/2/4
26
3.1.3.2 人工神经网络模型
按
神
经
○○○
元
连
接
○
○
○○
方
式
○
○○
○
○
分
类
层次型结构
2021/2/4
27
3.1.3.2 人工神经网络模型
按
神
经
○○ ○ ○ ○
元
连
○○○○
接
方
式
○ ○ ○○ ○
分
类
输出层到输入层有连接
2021/2/4
28
3.1.3.2 人工神经网络模型
i1
(3-1) (3-2)
2021/2/4
21
3.1.3.1 人工神经元模型
n
神
netj (t) wijxi (t)
经
i1
元
的
net’j=WjTX
数
学 Wj=(w1 w2 … wn)T
模 型
X=(x1 x2 … xn)T
(3-3) (3-4)
令x0=-1,w0=Tj,则有-Tj=x0w0
2021/2/4
输入样本
神经网络
自动提取 非线性映射规则
输出样本
非线性映射功能
2021/2/4
5
3.1.1 神经网络的基本特征与功能
2021/2/4
传统分类能力
ANN 分类能力
分类与识别功能
6
3.1.1 神经网络的基本特征与功能
2021/2/4
优化计算功能
7
2021/2/4
2021/2/4
17
3.1.2.3 生物神经网络
• 由多个生物神经元以确定方式和拓扑结构
相互连接即形成生物神经网络。
• 生物神经网络的功能不是单个神经元信息
处理功能的简单叠加。
• 神经元之间的突触连接方式和连接强度不
同并且具有可塑性,这使神经网络在宏观 呈现出千变万化的复杂的信息处理能力。
2021/2/4
3.1.1 神经网络的基本特征与功能
问题解答
知识分布式表示 知识获取、知识库
平行推理
输入数据
变量变换
求解的问题
由同一 神经网 络实现
神经网络专家系统的构成
知识处理功能
8
3.1.2 生物神经元及其信息处理
•生物神经元 •人工神经元模型
2021/2/4
9
3.1.2 生物神经元及其信息处理
人类大脑大约包含有1.41011个神经元, 每 个 神 经 元 与 大 约 103 ~ 105 个 其 它 神 经 元相连接,构成一个极为庞大而复杂的 网络,即生物神经网络。
18
3.1.3人工神经元模型及人工神经网络模型
神经元及其突触是神经网络的基本器件。因此, 模拟生物神经网络应首先模拟生物神经元。在人 工神经网络中,神经元常被称为“处理单元”。 有时从网络的观点出发常把它称为“节点”。人 工神经元是对生物神经元的一种形式化描述。
2021/2/4
19
神 经 元 模 型 示 意 图
22
3.1.3.1 人工神经元模型
神 经 元
n
ne tj Tj nejt wijxi WT j X (3-5)
的
i0
数
学
模 型
oj=f(netj)=f (WjTX)
(3-6)
2021/2/4
23
3.1.3.1 人工神经元模型
神 (1)阈值型转移函数
经 元
1 x≥0
f(x)=
的
0 x<0
转
f (x)
移
函
1 .0
数
0
(3-7)
x
2021/2/4
24
1 人工神经元模型
神 (2)非线性转移函数
经
元 的
f (x) 11ex (3-8)
f
( x)
1ex 1ex
转
f (x)
f (x)
移
函
1.0
数
0.5
x
0
1.0
0
x
-1.0
2021/2/4
25
3.1.3.1 人工神经元模型
神 (3)分段线性转移函数
2021/2/4
10
3.1.2 生物神经元及其信息处理
神经生理学和神经解剖学的研究 结果表明,神经元(Neuron)是脑组织 的基本单元,是人脑信息处理系统的 最小单元。
2021/2/4
11
3.1.2 生物神经元及其信息处理
3.1.2.1生物神经元的结构
生物神经元在结构上由
细胞体(Cell body) 树突(Dendrite) 轴突(Axon) 突触(Synapse)
人工神经网络是一种旨在模仿人脑结构及其功能 的信息处理系统。
2021/2/4
2
3.1.1神经网络的基本特征与功能
结构特征: 并行式处理 分布式存储 容错性
能力特征: 自学习 自组织 自适应性
2021/2/4
3
3.1.1 神经网络的基本特征与功能
联 想 记 忆 功 能
2021/2/4
4
3.1.1 神经网络的基本特征与功能
四部分组成。用来完成神经元间信息的接收、 传递和处理。
2021/2/4
12
2021/2/4
13
2021/2/4
14
3.1.2.2 生物神经元的信息处理机理
信息的产生
神经元间信息的产生、传递和处理是一 种电化学活动。
神经元状态:
静息
膜电位:
极化
兴奋
去极化
抑制
超极化
2021/2/4
15
3.1.2.2 生物神经元的信息处理机理
xn
(d)输 入 -输 出 函 数
20
3.1.3.1 人工神经元模型
n
神
oj(t)f{[ wijxi(tij)]Tj}
经
i1
元 的 数
τij—— 输入输出间的突触时延; Tj —— 神经元j的阈值; wij—— 神经元i到 j 的突触连接系数或称
学
权重值;
模 f ()——神经元转移函数。
型
n
oj(t1)f{[ wijxi(t)]Tj}
信
息
轴突
的
传
递
与
突触前
接
突触后
收
突触间隙 树突或胞体
2021/2/4
16
3.1.2.2 生物神经元的信息处理机理
信息的整合
空间整合:同一时刻产生的刺激所引起的膜电 位变化,大致等于各单独刺激引起的膜电位变 化的代数和。
时间整合:各输入脉冲抵达神经元的时间先后 不一样。总的突触后膜电位为一段时间内的累 积。
2021/2/4
3.1.3.1 人工神经元模型
x1
┆
oj
xi ┆
xn
(a)多 输 入 单 输 出
x1 w 1j ┆ w ij xI
┆ w nj xn
oj ∑
(c)输 入 加 权 求 和
x1 w 1j
┆ w ij
oj
xi ┆ wnj
xn
(b)输 入 加 权
x1 w 1j
┆ w ij xI
oj ∑f
┆ w nj