第5章_神经网络在控制中的应用
神经网络方法在自相关过程控制中的应用

A e u t P n u a ewo k s c e d n a g o d n i c t n r t . s a r s l ,B e r ln t r u c e s i o d i e t ai ae i f o Ke r s u o o r lt d p o e s P y wo d :a t c r eae r c s ;S C;n u a ewo k e r ln t r
A w n& R b r … 和 Wad l M0k wt 1a 0et s rel 。 s0 i z&Pat l e n 。
当过程 中存在显著 的相关性 时, 若仍使用传统
控制方 法 进行 过程 控 制 , 引发 大 量 虚 发 报 警 。很 将
多学者进行 了大量有益 的尝试 , 图找到一种可靠 试
哈特控制图进行修 正。但对于相关性 显著的过程 ,
这种 方 法 并 不 奏 效 。很 多 学 者 如 N l n、D na 、 eo s ucn
GatLaewr 等提供了若干补充规则 以加强休 rn evn o h & t 哈特控制图对于 自相关过程 的灵敏度 , 但这些规则 造成 了大量的虚发报警 , 使得传 统控制 图的可靠性 大大降低。 U U C S M控制图、 WM E A控制 图以及残差 控制 图都被尝试用 于 自相关过程控制 , 但效果 并不
HE Z e h n,L U Do g s e g I n —h n
(c ol f n gm n, i j n esy Taj 00 2 C ia S ho o ae et Ta i U i ri , i i 3 07 , h ) Ma nn v t nn n
Ab t a t T a i o a h wh r c n rl c a t i n t a p i a l n ma y a tma i p o e s b c u e d t sr c : r d t n l S e a t o t h r s o p l b e i n uo t r c s e a s a a i o c c f m h s n u t e r uo o r ltd n t i r s a c r t e e i d sr s a e a tc rea e .I h s e e r h,a B e r l ew r su i z d t e t y s i s o i P n u a t o k i t i o i n i h f n le d f t i r c s a a trv l e o t e e d 1 wih v r i g v l e ft e a t c rea in c efce t n p o e sp r me e au sf m i s r s mo es t a y n au s o h u o o r l t o f in . r me i o i
第5章 神经传感系统
第5章 神经传感系统
图5-5-tanh(x)函数及其导函数
第5章 神经传感系统
• ReLU(x)函数 ReLU(x)也是一种比较常见的神经网络激活函数,其映射 方法如式(5-5)、式(5-6)所示。
第5章 神经传感系统
ReLU(x)函数及其导函数曲线图如图5-6所示,从图中可 以看出 ReLU(x)是部分线性的,并且不会出现过饱和现象,使 用 ReLU(x)得到的随机梯度下降法(SGD)的收敛速度比 sigmoid和tanh(x)的都要快。利用 ReLU(x)函数计算,只需要 一个阈值就可以得到激活值,而不需要像sigmoid和tanh(x)一 样执行复杂的指数运算,原理易于理解,计算更为简单。
第5章 神经传感系统
图5-8 逻辑回归模型与神经网络模型对比
第5章 神经传感系统
对于具有多层或多个输出神经元的神经网络,其每个隐 藏层神经元或输出层神经元的值(激活值),都是由上一层神经 元经过加权求和与非线性变换得到的,网络拓扑图如图5-9所 示。
第5章 神经传感系统
图5-8 逻辑回归模型与神经网络模型对比
第5章 神经传感系统
图5-6 ReLU(x)函数及其导函数
第5章 神经传感系统
5.2.2 人工神经网络信息处理 人脑的每个神经元都可以看作一个处理单元,这些处理
单元互相连接形成了生物神经网络,网络中信号传递的强弱 由神经元之间的连接强度决定,连接的强弱又可以根据外部 的刺激信号作出自适应性的变化。信号可以产生刺激或抑制 的作用,每个神经元会根据接收到的多个信号的综合作用呈 现兴奋或抑制状态。
第5章 神经传感系统
轴突除了分出侧枝外,在其末端还会形成树枝样的神经 末梢,末梢分布于某些组织器官或骨骼肌肉内,形成各种神经 末梢装置(感受器或运动终端),比较典型的神经元结构图如图 5-1所示。
图神经网络在工业控制中的应用探讨(Ⅲ)
图神经网络在工业控制中的应用探讨随着人工智能技术的不断发展,图神经网络(Graph Neural Networks,GNN)作为一种新兴的深度学习模型,正在逐渐引起工业控制领域的关注。
图神经网络的特点在于能够处理图数据,而工业控制系统中常常涉及到复杂的图结构数据,因此图神经网络在工业控制中的应用具有广阔的前景。
本文将从图神经网络的基本原理、在工业控制中的应用场景以及存在的挑战和未来发展方向等方面展开探讨。
图神经网络是一种专门用于处理图数据的深度学习模型,其基本原理是利用节点和边的信息来学习图数据的特征表示。
与传统的深度学习模型相比,图神经网络能够有效地捕捉图数据中的局部特征和全局信息,从而更好地适用于工业控制系统中的复杂图数据。
在工业控制中,常常涉及到诸如电力系统、智能制造、交通运输等领域,这些系统往往具有大量的节点和边,而图神经网络的特性恰恰适合于对这些复杂系统进行建模和分析。
在工业控制领域,图神经网络可以应用于诸多场景。
首先,图神经网络可以用于故障诊断和预测。
通过对工业控制系统中的传感器数据进行建模,结合图神经网络的特征学习能力,可以更准确地识别系统中的故障节点,并预测可能出现的故障情况,从而提高系统的可靠性和稳定性。
其次,图神经网络还可以用于优化控制。
工业控制系统往往涉及到复杂的控制策略,而图神经网络可以通过学习系统的拓扑结构和节点之间的关联,帮助优化控制策略,提高系统的效率和性能。
此外,图神经网络还可以应用于资源调度、供应链管理等方面,为工业控制系统的优化提供技术支持。
然而,尽管图神经网络在工业控制中具有广泛的应用前景,但也面临诸多挑战。
首先,图神经网络的计算复杂度较高,特别是对于大规模图数据的处理,需要消耗大量的计算资源和时间。
其次,工业控制系统中的数据往往具有噪声和不确定性,如何有效地处理这些数据,提高模型的鲁棒性是一个亟待解决的问题。
此外,图神经网络在工业控制中的实际应用还需要更多的工程化工作,包括模型的部署和维护等方面的考虑。
模糊神经网络PID在恒气体流量控制中的应用

A () 4 X =k x( + i () x ( uk =f ・C pc1 k c2 + c3 ) x )
其中: x ( =ek c1 () ) x () () ( 一 ) c2 =P七 一ek 1
x( = c ) 3 = 一 e -) e - ) 2( 1 ( 2 k + k uk =uk 1十A () () ( 一 ) uk
禽j
运 算 ,根据F zy 统的推 理方 式 (f n e uz系 i A A dB t n h
C) , 确 定 F zy R F N的 模 糊 推 理 层 的 个 数 为 uz B N
5 5 2 个 ,也就 是系统 中4 条F zy 则前 件 。 x=5 9 uz 规 本层 每个 节点 的输 出 ( 每条 规则 的适用 度 )是 该 点所 i 了 有输 入信 号 的乘 积【, 即 4 1
() 6
第三层的节点数为N 552 。Fzy B N =x=5 uz F N的输出层节 R
点数为3 ,分别为PD I 控制器的 、K、 三个参数。 i
第 一层 :输入 层 。
() 7
采 用增 量式P D 制算法 : I控
() 8
输 入节 点个 数也 是输 入变 量个 数 ,输入 层 ( 第 层 )的 各节 点直接 与输 入量 的各 分量 相连 接 ,把 输 入量 传递 到下 一层 。第一 层 的每个节 点i 的输入 输
一
采用D l 学 习规则来调整参数,定义 }标函数为 ea t j
出关 系可表 示为
E= ( () yu k ÷, 一 ot ) ()
= = ,2 ] x, …, () 1
式 中 ,r () i k为网络 理想输 出:y u() 网络 实 际输 n ot 为 k 出;r () o t ) i k. u( 为每一 个迭 代步 骤k n y k 的控制 误差 。 网络 权值 的学 习算法 为
神经网络自学习模型控制器在直流蒸汽发生器控制中的应用

本 文 采 用 二 维模 糊 控 制 器 , 以误 差 和误 差 的变
化 为输 入变 量 , 以控 制 量 的 变化 为 输 出 变量 。描 述
输 入 变量 E 的语 言 值 的模糊 词 集 为 : E={ 大 , 中 , 小 , 零 , 零 , 负 负 负 负 正 正小 , 中 , 正
0 概
述
发生 很 大变 化 , 干点 是 变化 的 , 过热 蒸汽 压 力变 蒸 在
化很 小 时 , 热 蒸 汽温 度 变化 很 大 , 过 这对 于螺 旋盘 管
热疲 劳 分析 是相 当重要 的 。
在 国内 , 由于 新 型 船 用 核 动 力 装 置 拟 采 用 直 流
蒸 汽 发生 器 , 因此 对 直 流 蒸 汽 发 生 器 的研 究 和探 讨
描 述 输 出 变 量 U 和 输 入 变 化 E 的模 糊 词 集 C
为:
化 为 蒸汽 的 比例 也 降 低 , 因此 二 回路 蒸 汽 压 力 又 慢
慢 降低 。但一 回路载 热剂 温 度扰 动 相对 于 负 荷 与给 水扰 动 来说 , 二 回路蒸 汽 压力 的 变化 的影 响要 小 。 对
直 流 蒸 发 器 的各 段 长 度均 发 生 变 化 , 受 干 扰 所
也在 逐渐 展 开 。根 据新 型 船用 核 动 力装 置 的运 行方 案 的要 求 , 流蒸 汽 发 生 器 过 热 蒸 汽 的压 力 必 须 控 直 制在 规 定范 围之 内 , 且 船 用 核 动 力 装 置 变 负 荷 特 而 性 , 致产 生 蒸 汽量 的变化 , 导 如何 保证 要 求 的干 度 和 蒸 汽压 力 的稳定 , 必 须 进 行 蒸 汽 压 力 控 制 策 略研 也 究 。 由于 直 流蒸 汽发 生器 水 容积 小 , 蓄热 能 力 小 , 因
蚁群算法优化BP神经网络在主汽温控制中的应用
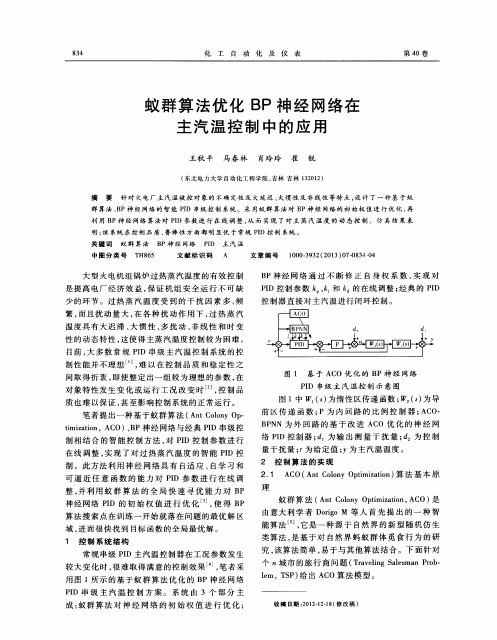
量 干扰量 ; r 为 给定值 ; 为 主汽温 温度 。
2 控 制算 法的 实现 2 . 1 A C O( A n t C o l o n y O p t i m i z a t i o n ) 算 法基 本 原
理
可逼 近 任 意 函数 的 能力 对 P I D参 数 进 行 在 线 调
利用 B P神 经 网络 算 法 对 P I D参数进行在线调 整 , 从 而 实现 了 对 主 蒸 汽 温 度 的 动 态控 制 。仿 真 结 果 表 明: 该 系统在 控 制 品质 、 鲁棒 性 方 面 都 明 显优 于常 规 P I D控 制 系统 。
关 键 词 蚁 群 算 法 中 图分 类 号 B P神 经 网络 P I D 主 汽 温 文章 编 号 1 0 0 0 — 3 9 3 2 ( 2 0 1 3 ) O 7 - 0 8 3 4 - 0 4
常规 串级 P 得 满 意的控 制效果 , 笔者 采 用图 1 所示 的基 于 蚁群 算 法优 化 的 B P神 经 网络 P I D 串级 主 汽 温 控 制 方 案 。系 统 由 3个 部 分 主
成: 蚁群 算 法 对 神 经 网络 的初 始 权 值 进 行 优 化 ;
整, 并利用 蚁 群 算 法 的全 局 快 速 寻 优 能 力 对 B P 神经 网络 P I D 的 初 始 权 值 进 行 优 化 , 使得 B P 算法 搜索 点在训 练一 开始就 落在 问题 的最优解 区 域, 进而很 快找 到 目标 函数 的全局 最优解 。
1 控 制 系统 结 构
8 3 4
化
工
自 动 化
及 仪
表
第4 O卷
蚁群 算 法优 化 B P神 经 网络在 主 汽 温 控 制 中 的 应 用
神经网络控制
从而使神经网络控制器逐渐在控制作用中占据主
导地位,最终取消反馈控制器的作用;
✓
一旦系统出现干扰,反馈控制器重新起作用。
✓
可确保控制系统的稳定性和鲁棒性,有效提高系
统的精度和自适应能力。
神经网络
控制器
期望输出
()
−1
()
+
-
()
传统控
网络实现;可进行离线辨识,也可进行在线辨识。
+
-
逆向建模
一般而言,建立逆模型对神经网络控制意义重大。
直接逆建模简化结构图:
可用于离线辨识,也可
用于在线辨识。
对 象
+
神经网络
逆模型
缺点:不是目标导向的,系统输入也不可能预先定义。
实际常采用正-逆建模结构。
正-逆建模
神经网络
逆模型
对 象
第3章 神经网络控制
第2部分 控制基础
3.5 神经网络控制基础
3.5.1 神经网络控制的优越性
神经网络可以处理那些难以用模型或规则描述的过
程或系统。
神经网络采用并行分布式信息处理,具有很强的容
错性。
神经网络是本质非线性系统,可实现任意非线性映
射。
神经网络具有很强的信息综合能力,能同时处理大
期望输出
()
稳定的参
考模型
参考模
型输入
()
+
()
()
+
-
神经网络
控制器
()
对象
()
神经网络控制

M—P模型的提出兴起了对神经网络的研究。
(2) 1949年心理学家D.O.Hebb提出神经元之间突触联系强度可变 的假设。他认为学习过程是在突触上发生的,突触的联系强度随其前 后神经元的活动而变化。根据这一假设提出的学习率为神经网络的学 习算法奠定了基础。
(3) 1958年,Rosenblatt提出感知机,第一次把神经网络的研究付 诸工程实践。这是一种学习和自组织的心理学模型,它基本上符合 神经生理学的知识,模型的学习环境是有噪声的,网络构造中存在 随机连接,这符合动物学习的自然环境。这种类型的机器显然有可 能应用于模式识别、联想记忆等方面。
3.兴盛阶段
再次兴起的原因:
(1)计算机不具备学习能力。在处理能明确定义的问题或运用能明 确定义的概念作为知识时,计算机比较容易对它们进行处理,但是对 一些知识背景不清楚、推理规则不明确、环境信息十分复杂的知识处 理或是算法难以提取的信息处理任务往往感到很困难。 (2)日本第五代机计划远未达到预想水平,也倾向使人觉得有必要 进一步弄清人们习以为常的认知功能是如何进行的.这些认知功能包 括视、听觉感知,学习记忆,运动控制等.从而使人们认识到不能拘 泥一格而必须开拓新的思路,探索新的人类智能实现途径。这时原来 已出现过的,与人脑的生理组织更为接近的神经网络模型就自然成为 理想的候选模型。
兴盛阶段的标志:
(1)近些年来.许多科学家提出了许多种具备不同信息处理能力的神 经网络模型,至今为止。约已开发出了三十多种。神经网络也 被应用到了许多信息处理领域,如模式别、自动控制、信号处理、辅助 决策、人工智能等等。 (2)神经计算机的研究也为神经网络的理论研究和应用研究促供了 强有力的支持,各大学、科研团体和公司开发了许多神经网络模拟软 件包、各种型号的电子神经计算机以及许多神经网络芯片。 (3)1987年6月在美国加州举行了第一届神经网络国际会议,并成立 了国际神经网络学会,以后每年召开两次国际联合神经网络大会 (IJCNN)。 1990年12月在北京召开了我国首届神经网络学术大会,在南 京召开的1991中国神经网络学术大会上成上了中国神经网络学会。当前 发行了两种专门介绍神经网络研究的刊物,《IEEE Transaction on Neural Network》和《Neural Network》