840D_PLC_OB100功能块
840D_810D的PLC启动与PLC高级功能应用解析

第7章840D/810D的PLC启动与PLC高级功能应用启动SINUMERIK 840D/810D数控系统的PLC必须借助于西门子提供的TOOLBOX工具盘,TOOLBOX工具盘提供了与系统版本相匹配的基本程序库以及硬件信息,同时还提供了一个NC变量选择器用于选择NC变量。
在本章中,主要介绍如何启动数控系统的PLC以及应用PLC基本程序块。
7.1 PLC调试SINUMERIK 840D系统的组件通过OPI接口连接在一起,传输速率为1.5Mbaud(810D 只能连接MPI接口传输波特率为187.5Kbaud),所有部件都被给予一个预定的MPI地址如图7-1所示。
只有当多个MMC和多个NC相连接(M:N连接器)才需要改变地址。
图7-1 SINUMERIK 840D系统组件的连接SINUMERIK 840D提供了2个接口。
当使用MPI接口(X122)时必须设MPI=2,而对OPI 接口(X101)则MPI=13,在PG/PC上对传送速度进行正确的设置。
上装站点项目到PC;通过菜单Destination station -> Load station to PG 可将PLC程序保存到SIMATIC项目中。
程序块和硬件组态都传到项目中。
在屏幕表格“Select station addres“中,要选择机架0和槽位0。
传送速度为187.5Kbit/s时选MPI地址2,而在1.5Mbit/s 选OPI地址13。
7.1.1 TOOLBOX的介绍840D/810D集成了PLC模块,PLC程序分为基本程序和用户程序,用户的程序是在基本程序的基础上建立的。
数控系统的TOOLBOX包含了840D系统地PLC基本程序,可以从Step7的SIMATIC管理器下打开,并下装到PLC中。
它包含的是SIEMENS编写的现成的块,这些块采用结构化编程,具有通用性,可以实现代码共用,对于用户来说只需要了解其形参的含义并正确地给它赋实际参数值。
840D S7 PLC简介
840D S7-300 简介2005年10月20日目 录〈1〉硬件组成 -------------------------------------------------------------------------- -4 〈2〉地址分配-----------------------------------------------------------------------------4 〈3〉联机软件必备工具-----------------------------------------------------------------4〈4〉通电后NC 和 PLC 的总清-----------------------------------------------------4〈5〉TOOLBOX的使用-----------------------------------------------------------------4〈6〉 840D PLC程序的编制-------------------------------------------------------5〈7〉语言的选择 ------------------------------------------------------------------------8〈8〉通讯口的设置-----------------------------------------------------------------------8〈9〉项目完成后的备份-----------------------------------------------------------------8〈10〉 840D 用户资源-------------------------------------------------------------------9 〈11〉 840D PLC 的组成--------------------------------------------------------------9 〈12〉 S7-300 指令----------------------------------------------------------------------10 〈13〉 比较指令--------------------------------------------------11〈14〉计数器指令------------------------------------------------12〈15〉定时器----------------------------------------------------13〈16〉逻辑控制指令----------------------------------------------14〈17〉程序控制指令----------------------------------------------15〈18〉逻辑字指令------------------------------------------------15〈19〉 内部累加器描述-------------------------------------------17〈20〉 状态字--------------------------------------------------17〈21〉利用编程器进行状态监控-----------------------------------18〈22〉Plc 诊断-------------------------------------------------18〈23〉S7-300 软件的安装与授权----------------------------------20 〈24〉附 PLC Diagnostcs300 简介1.硬件组成:S7-300 由电源模块 PS 中央处理器 CPU 输入输出模块 I/O组成.一条导轨最多可放8块I/O 模块.最多可扩展至4条导轨.840D PLC的CPU集成在数控系统内部,头8块I/O模块的地址被NC 内部占用,所以840D最多可扩展至三条导轨,即24块I/O模块。
840D_PLC功能块

手持操作面板输入起始地址 0 手持操作面板输入信号起始双字 手持操作面板输出信号起始双字 从手持操作面板接收的字节号 从手持操作面板发送的字节号 手持操作面板循环监控时间 手持操作面板循环时间 HHU GD循环参数 收到的GI号 传送GI的对象号 HHU GD循环参数 传送的GI号 传送GI的对象号码 0=OPI 1=MPI HHU停止:1=手持停止 0=发送和接收HHU信号 1=只接收HHU信号
WORD S7_POINTE R S7_POINTE R S7_POINTE R S7_POINTE R WORD ULONG ULONG
WORD
ULONG ULONG
VKE_TYPE
b#16#55: 以太网 只有IE装置 只有IE装置 激活查询 来自方式组的方式组号 来自通道的通道号 来自轴的轴号 有效通道的字符串 有效轴的字符串 机床输入数据DB20的整数号 机床输入数据DB20的十六进制号 机床输入数据FB20的实数号 类型 (HT2, HT8, ...) PLC输入数据信息长度 PLC输出数据信息长度
1 P#I 0.0 P#Q 0.0 P#Q 8.0 P#Q 12.0 6 S5T#700MS S5T#200MS
0
. 0
S5T#800MS S5T#80MS 2 2 1 2 1 1 1 0 0
S5T#200MS S5T#50S
ListMDecGrp NCKomm MMCToIF HWheelMMC ExtendAlMsg MsgUser UserIR IRAuxfuT IRAuxfuH IRAuxfuE UserVersion OpKeyNum Op1KeyIn Op1KeyOut Op1KeyBusAdr Op2KeyIn Op2KeyOut Op2KeyBusAdr Op1KeyStop Op2KeyStop Op1KeyNotSend Op2KeyNotSend OpKeyBusType IdentMcpBusAdr IdentMcpProfilNo IdentMcpBusType IdentMcpStrobe MaxBAG MaxChan MaxAxis ActivChan ActivAxis UDInt UDHex UDReal IdentMcpType IdentMcpLengthIn IdentMcpLengthOut
840D培训-启动与参数(徐咏祥)

PLC启动徐咏祥SINUMERIK 840D的PLC为SIMATIC S7-300基本模块有64K内存配置,并可扩展至96KB,PLC程序又可划分为基本程序和用户程序,其组成结构.(见图)PLC基本程序在随系统一起到货的工具盒(Toobox)中,我们可以找到Gp8xod.exe这一文件(在相应的版本目录下),将其拷贝到STEP7下的一个”S7 Libs”目录下.双击之,此文件遂自动解压.生成一个文件名为”Gp8xod43”(SW为 4.3).运行STEP7,然后操作如下:File→Open→Library→打开Gp8xod43→选中Blocks.将此Project拷贝到你新建的一个Blocks 下,存盘之后,可将这个新建的Project下装,成功后,MCP上的灯应不再闪烁.为了能使用MCP,还应在OB1中调用MCP应用的基本程序FC19(铣床版)或FC25(车床版),输入适当的参数即可.下装成功后有灯亮.对于机床制造商来讲,一般只需对下述几个程序块作研究即可:FB1、FC2、FC19/FC25、FC10等.FB1/DB7 ----Startup Baseprogram/Parameters for BaseprogramFC19----MCP-Signals to Interface,Variant MFC10-----用于传送报警和提示到用户接口若干重要信号急停:DB10.DBX56.1; DB10.DBX562; DB10.DBX106.1;在PLC基本程序装入后,首先要处理的就是急停信号与急停有关的信号有: DB10.DBX56.1 急停输入(PLC→NC)DB10.DBX562 急停确认(PLC→NC)DB10.DBX106.1 急停有效(NC→PLC)它们之间的时序图如下:急停确认接口信号急停有效接口信号复位接口信号①接口信号”急停确认”无作用②接口信号”复位”无作用③接口信号”急停确认”和”复位”将”急停有效”复位.★轴:DB3*.DBX1.5; DB3*.DBX1.6; DB3*.DBX2.1; DB3*.DBX21.7;轴:与轴有关的信号很多,但最基本的有:DB3*.DBX1.5: 测量系统1有效;DB3*.DBX1.6: 测量系统2有效;DB3*.DBX2.1: 轴伺服使能;DB3*.DBX21.7: 轴脉冲使能.如果要运行一个轴,必须激活以上信号,其中DB3*.DBX1.5和 DB3*.DBX1.6只需激活一个即可,若两个信号均为1,则测量系统1有效.★读入禁止: DB21.DBX6.1读入禁止:在进行换刀等处理时,需用到读入禁止信号,当此信号为1时,NC进入读入禁止状态,NC程序暂停执行;当此信号为零时,NC程序继续执行.几点说明在调试PLC程序时,应了解以下内容:(1) 你所编制的FC块或FB块如在OB块中不调用,则该程序块是不执行的.(2) 最好在离线状态下修改程序,存盘后再下传.(3) STEP7中PLC程序多次编辑,运行后适时作压缩,操作步骤为:在线→PLC→模块信息(Module Information) →内存(Memory) →压缩.(4)新建一个Project的步骤为:File→NEW→输入Project名字,点OK→Insert→Station→Simatic 300 Station→双击点开这个站→点online钮→点一下Hardware →PLC→Unload station.完成后,可将基本程序的内容拷贝到此站中.Start up Mode:恢复到出厂设置,会清掉所有的用户数据MD分为三大类:General MD 基本机床数据 10000开始Channel MD 通道机床数据 20000~Axis MD 轴的机床数据 30000~轴的类型:机床轴---机床上所有实际存在的轴,名称任意,最多15个字符,字母开头几何轴---组成假想直角坐标系的三个轴,数量最多三个,最好用X、Y、Z命名(影响G17、G18、G19和刀补)非几何轴(附加轴、特殊轴)---如转台、刀库、主轴等.关系:几何轴机床轴非几何轴(附加轴、特殊轴)通道轴---把某轴分配给某通道,该轴即为该通道的”通道轴”轴的配置分三级1) 机床级---定义机床轴名2) 通道级---指定在NC程序中用的轴名3) 编程级---指定几何轴名称NC Startup基本步骤(以2Ax+1sp为例)机床数据修改后的几种生效方式po—Power on(NCK reset)cf—(set MD to active(sk))或左下角红色∥reset键(MCP)Re-MCP上的reset键Im-立即生效在Channel中设20070-让机床轴在通道中重新排列,后面的数字从”1”开始,表示对应的机床轴没有的写”0”20080-通道轴的通道名,在程序中用到的名字,最好是单字符的(为了编程方便) 20050-在通道中定义的几何轴,没有的写”0”(1、2、3)20060-X、Y、Z20700设为0就不需要回零实际数据1 2 3机床轴X Y SPMD 10000 [0] X MD 20070[0] 1[1] Y [1] 2[2] SP [2] 3MD 20080 [0] X MD 20050[0] 1[1] Y [1] 2[2] C [2] 0MD 20060 [0] X[1] Y[2] ZAxis MD30310--为”1”表示实物存在的轴,为”0”表示虚拟轴30240—表示位置测量口的定义,增量型=1,绝对型=4驱动参数(Drive MD)在备份时生成的文件名为*.bot30330—以度显示30310—模态的,给定值小于360度,=1为模态30320—显示的为模态如果要转一圈以上可以用G91 C 361,要求转的角度35100—允许的主轴最大转速,编程速度大于此值时以此值运转36200—报警速度,此值应该比35100略大,给定速度大于此值时报警30300—轴的类型,线性轴还是旋转轴31000—直连/非直连,编码器在电机上的都属于非直连.Power on与Power up的区别. 840D启动小结1) 检查硬件设定,连线是否正常2) 通电检查NCK、PLC、MMC的Power-up是否正常,不正常的要排除故障3) 做NCK”基本启动”4) 做PLC”基本启动”5) 轴+主轴运行6) PLC用户报警文本7) 数据备份回参考点的功能设定.1、概述・返回R点的目的—实现机械零点与电气零点同步・Sinumerik 840D对位置测量系统的要求1) 增量式回转测量系统(编码器)2) 增量式线性测量系统(光栅尺)3) 带距离编码参考点标记的线性测量系统(海德哈因光栅尺可以快速回R点)2、详述・有两个位置测量系统的轴—要分别回R点・REF机床功能:在JOG或MDA方式下.启动方式1) 轴特定的回R点・由MCP上+/-方向键启动・可以若干轴同时启动运行(840D最多8个轴)・由操作者控制顺序(或PLC程序控制顺序)通道特定的回R点・由IS:DB21.DBX1.0启动(激活回R点)・本通道管辖的轴以MD34110中所定的顺序返回R点3增量式测量系统的返回R点,分三大阶段1) 找撞块2) 找零脉3) 找R点・阶段1(三种可能)(IS”delay”正常为0)1A.轴位于CAM前1B.轴位于CAM上1C.无CAM(MD34000=0,不用IS”DELAY”)(IS”DELAY”:DB31.DBX12.7”减速信号”又称CAM信号)动作过程1A.启动→高速(MD34020)→IS”DELAY”变”1”→减速至0→进入阶段2 1B.直接进入阶段21C.直接进入阶段2(不用IS”DELAY”)阶段2(两种可能)2A.用CAM信号下降沿同步(MD34050=0)2B.用CAM信号上升沿同步(MD34050=1)动作过程2A:向相反的方向启动→低速→IS”delay”恢复”0”→控制器等待最近一个零脉冲→同步完成→开始阶段32B:向相反的方向启动→高速→IS”delay”恢复”0”→减速至0→马上再反向启动→低速→IS”DELAY”变为”1”,控制器等待最近一个零脉冲→同步完成→开始阶段3阶段3—找R点+精调阶段3紧接阶段2(速度衔接)动作过程以MD34070定义的速度移动MD34080(找R点距离)+MD34090(精调偏置)的距离→完成阶段3.(若MD34080和MD34090皆为0,则无阶段3)・阶段3完成后,轴的实际值=MD34100(MD34100可设4个不同值,用IS(DB31.DBX2.4~7选择其中之一)・其它有关MD与阶段1有关的MD11300—方向键是否要保持按住MD34010—用+或-方向键启动MD34030—安全距离与阶段2有关的.MD34080—安全距离,默认值20mm(略大于1螺距)通道特定的回R点:MD34110—顺序0—所有轴不必回R点MD20700= =-1—本轴不必回R点1→MD34110≠-1本轴必须回R点增量测量系统返回参考点示意图R参数数字:全局变量物理:存储器R0~R99 为32位实数可扩展到999个G1 X=R0 Y=R1 Z=R2 F1000R0=R0+1 R1=R4*2+100 R5=SIN(R5)*COS(R6)a. 可以在菜单R参数下给其赋值b. 也可以在程序中给R参数赋值如:R0=50 R1=20 R2=40当程序中给R赋值后,菜单表格中的R参数自动修改.机床数据范围类别1000~1799 驱动机床数据9000~9999 操作面板机床数据10000~18999 通用机床数据19000~19999 预留20000~28999 通道机床数据29000~29999 预留30000~38999 轴机床数据概述基本机床数据(General)—用于NC基本设置,通过基本机床数据可以进行系统设定,偏置的设定,驱动数据及系统内存分配.特定通道的机床数据(Channel Specific)—通过特定通道的机床数据,管理某个通道的程序运行.例如:通道轴的分配.通过”Channel+”和”Channel-“软键进行通道的切换.特定轴的机床数据(Axis Specific)—对机床上的每一根轴进行参数设置.例如:给定值与实际置,轴的优化,主轴的设定等.通过”Axis+”和”Axis-“软键进行轴的切换.驱动机床数据(Drivers)—调整SIMODRIVE 611D驱动.主要用于设置电机参数,进行驱动优化,如果对这里面的数据进行了修改,必须将它们保存为启动文件(boot file),放在NCU RAM区中.通过”Drive+”和”Drive-“软键可以进行驱动的切换.显示机床数据(Display)—设置显示机床数据.机床数据的激活机床数据的激活机床数据设置完后并不是马上生效,机床数据最后一列显示出该机床数据的激活方式po—上电(POWER ON) NC上的RESET键或”reset”软键cf—新设定值(NEW CONFIG) “SET MD active”软键或MCP上的RESET键re—复位(RESET) MCP上的RESET键im—立即生效(Immediately) 输入后马上生效访问权限要想显示机床数据,用户的最低权限要为等级4(钥匙开关位置3)要想输入或修改机床数据,用户的最低权限要为2(密码:”EVENING”)切换机床数据显示内容切换显示内容通过机床数据MD9900可以在机床数据名和机床数据说明文档之间切换MD9900=0 以机床数据名方式显示MD9900=1 以机床数据的说明文档方式显示此数据对所有数据区都有效.“显示选项”和”搜索”软键”Search 通过点击”Search”软键.输入机床数据号或者机床数据名称,可以实现对机床数据的搜索,只搜索本数据区域内的机床数据.如果搜索的对象出现多次,通过”Continue search”软键可以进行再搜索显示设置使用显示过滤器,可以按照用户的要求减少显示数据,不同区域内的数据也可以定义为特定的数据组.机床数据的帮助文件帮助功能软键版本V5.2以上提供了机床数据的在线帮助.选好机床数据以后,通过帮助按键调用帮助文件.在线帮助内容与”功能描述”文档一致.通过修改键进行机床数据位操作用16进制机床数据的编辑器可以通过位编辑器,对机床数据的某一位进行设置,当光标位于16进制格式的数据上时,可以用修改键启动位编辑器.可以将光标移到相应的位上,通过修改键对该位进行置位或者复位.位编辑器只能用于MMC103/PCU50并且软件版本在4.1以上.文件功能文件功能 “File function”软键可以快速保存机床数据.当保存轴机床数据的时候,只有当前显示的轴数据被保存,通道及驱动数据也一样.相应的数据被保存在了”Diagnosis”文件夹中.机床数据文档文档在”List”中可以看到简单的机床数据描述,详细的解释可以参见”Cross-reference”状态栏中所提供的参考文档,相应的文档名称在”Cross-reference”栏中以缩写的方式表示.例如上图中的”K2”.数据备份在进行调试工作时,为了提高效率不做重复性工作,需对所调试数据适当地做备份。
西门子PLC中各个组织块OB作用

西门子PLC中各个组织块OB作用1.OB1:OB1是西门子PLC中最重要的一个组织块,也是原始程序的入口点。
OB1在PLC加电后首先执行,并决定其他OB组织块的执行顺序。
它包含了初始化程序、故障处理、中断处理等主要功能,它对整个控制过程起着关键性作用。
2.OB2:OB2是一个错误组织块,用于处理运行时的错误和异常。
在PLC运行过程中,如果发生错误,比如传感器故障、通信异常等,OB2将负责处理和记录这些错误。
它可以通过警报或报警灯等方式告知操作员错误的发生。
3.OB3:OB3是一个系统状态组织块,用于监控PLC系统运行状态。
它可以检测并记录PLC中的各种状态信息,比如CPU利用率、内存使用情况、网络通信状态等。
OB3可以帮助工程师了解系统的运行情况并进行优化。
4.OB10:OB10是一个周期性组织块,用于周期性地执行程序中的周期任务。
它可以通过设置时间周期和触发条件来执行周期性操作,比如定期更新数据、定时刷新显示等。
OB10可以根据实际需求进行灵活配置,以确保程序的正常运行。
5.OB20:OB20是一个中断组织块,用于处理外部中断事件。
当PLC接收到外部中断信号时,OB20将被触发,执行相应的任务。
这些中断事件可以是硬件设备的故障信号、紧急停机信号等。
OB20可以确保及时处理这些中断事件,并采取相应的措施。
6.OB40:OB40是一个硬件故障组织块,用于监测和处理与硬件设备相关的故障。
当硬件设备发生故障时,OB40将负责处理该故障,比如停止相应的操作、记录故障信息等。
OB40可以保护设备免受损坏,并防止故障进一步扩大。
7.OB80:OB80是一个厂商特定组织块,用于定制特殊功能和特定的控制逻辑。
它可以根据用户的需要进行编程,添加一些定制化的功能,比如与外部设备的通信、数据处理等。
OB80可以根据不同的应用场景进行灵活配置和调整。
除了以上介绍的几个典型的OB组织块外,西门子PLC还提供了其他一些特殊的组织块,如OB5、OB100等,它们各自具有不同的功能和作用。
840Dsl PLC的组态方法
设定PLC内部通讯接口
设定CP网络接口的属性
编译后下载
调用标准的库
拷贝标准程序块到建立的项目
修改OB100,设定MCP的地址和通讯类型
修改OB1,调用FC19,设定MCP点对应输出
下载到PLC里面去
MCP和NCU外部组态基本结束
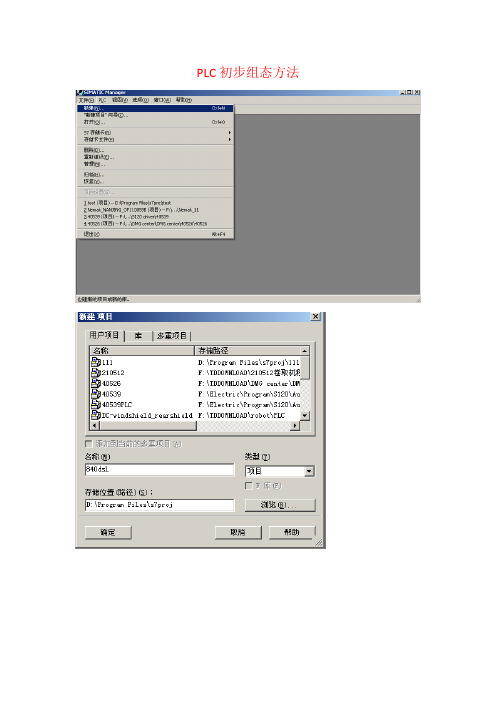
plc初步组态方法numerik找到对应的模块根据序列号双击设定cp网络接口的属性编译后下载保存并编译下载调用标准的库型号决定拷贝标准程序块到建立的项目修改ob100设定mcp的地址和通讯类型修改ob1调用fc19设定mcp点对应输出下载到plc里面去mcp和ncu外部组态基本结束
西门子_PLC_中各个组织块OB作用
西门子_PLC_中各个组织块OB作用1、自由循环组织块OB1S7 CPU启动完成后,操作系统循环执行OB1,OB1执行完成后,操作系统再次启动OB1。
在OB1中可以调用FB、SFB、FC、SFC等用户程序使其循环执行。
除OB90以外,OB1优先级最低,可以被其他OB中断。
OB1默认扫描监控时间为150ms(可设置),扫描超时,CPU自动调用)B80报错,如果程序中没有建立OB80,CPU进入停止模式。
2、日期中断组织块OB10~OB17在CPU属性中,可以设置日期中断组织块OB10~OB17触发的日期、执行模式(到达设定的触发日期后,OB只执行一次或按每分、每小时、每周、每月周期执行)等参数,当CPU的日期值大于设定的日期值时,触发相应的OB 并按设定的模式执行。
在用户程序中也可以通过调用SFC28系统函数设定CPU 日期中断的参数,调用SFC30激活日期中断投入运行,与在CPU属性中的设置相比,通过用户程序,可以在CPU运行时灵活地修改设定的参数,两种方式可以任意选择,也可以同时对一个OB进行设置。
3、时间延迟中断组织块OB20~OB23时间延迟中断组织块OB20~OB23的优先级及更新过程映像区的参数需要在CPU属性中设置,通过调用系统函数SFC32触发执行,OB号及延迟时间在SFC32参数中设定,延迟时间为1~60000ms,大大优于定时器精度。
4、循环中断组织块OB30~OB38循环中断组织块OB30~OB38按设定的时间间隔循环执行,循环中断的间隔时间在CPU属性中设定,每一个OB默认的时间间隔不同,例如)B35默认的时间间隔为100ms,在OB35中的用程序将每隔100ms调用一次,时间间隔可以自由设定,最小时间间隔不能小于55ms。
OB中的用户程序执行时间必须小于设定的时间间隔,如果间隔时间较短,由于循环中断OB没有完成程序扫描而被再次调用,从而造成CPU故障,触发OB80报错,如果程序中没有创建OB80,CPU 进入停止模式。
第七章 840D的扩展

7 840D的扩展7.1概述在本章主要介绍接口信号块:FB1起动功能块、FB2/FB3读/写NC的功能块、FB4基本服务功能块。
840D的S7 块结构:如图7-1图7-1 其中OB1为循环调用组织块OB40为硬件中断组织块OB100为初始化组织块7.2 FB1 起动功能块FB1的参数表:如图7-2图7-2说明:MCPNum:用几块MCP面板MCP1In,MCP2In:MCP输入最小地址从几开始Listmdecgrp:控制M功能NCKomm:该参数缺省为“0”,当用FB2/FB3/FB4时,该参数必须为“1”,否则报警例如:在OB100中调用FB1。
Call fb1,db7Mcpnum:=1Mcp1in:=p#i0.0Mcp1out:=p#q0.0Mcp1startsend:=p#q8.0Mcp1startrec:=p#q12.0Mcp1busadr:=6Mcp1timeout:=s5t#700msMcp1cycl:=s5t#200msNc-cycltimeout:= s5t#200msNc-runuptimeout:= s5t#50s7.3 FB2/FB3 读写NC的功能块7.3.1 FB2/FB3的功能简述NC_variable_selector图7-3如图7-3,FB2为PLC通过DB块来读取NCK内数据的功能能块;FB3 为PLC 通过DB块向NCK内写数据的功能块。
其中DB块是由NC变量选择器(NC_variable_selector)生成的数据块。
7.3.2 NC 变量选择器的用法在TOOLBOX盘里把NC_variable_selector安装到PC机中,自动安装,会在桌面上产生个NC_variable_selector的图标。
西门子已经把NC里的所有参数通过列表形式都写在这个NC变量选择器中。
通过NC_variable_selector的select功能把想要读/写的VAR选择出来,然后进行编译,生成一个S7的源文件,然后再通过S7软件把这个源文件反编译成一个DB块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
手持操作面板输入起始地址 手持操作面板输出起始地址 手持操作面板输入信号起始双字 手持操作面板输出信号起始双字 从手持操作面板接收的字节号 从手持操作面板发送的字节号 手持操作面板循环监控时间 手持操作面板循环时间 HHU GD循环参数 收到的GI号 传送GI的对象号 HHU GD循环参数 传送的GI号 传送GI的对象号码 0=OPI 1=MPI HHU停止:1=手持停止 0=发送和接收HHU信号 1=只接收HHU信号
NC循环时间 NC启动监控时间
0=不激活
NC通讯有效
1=激活扩展M功能组译码
1=传送从MMC、HMI信号到接口地址(方式、程序控制等等) 1=手轮由MMC/HMI选择 0=手轮由用户程序选择 激活扩展FC10功能 用户区消息号 从用户扩展数据信号传入OB40所需信号 在OB40赋值T功能 在OB40赋值H功能 在OB40赋值D功能 版本显示指定字符串变量 直接激活钥匙组件号 0=没有以太网,直接按键激活 直接控制钥匙组件的起始地址 直接控制钥匙组件输出的恰是地址 由以太网控制按键:TCU索引
MCP面板总线地址 192=网口 MCP面板循环监控时间 MCP循环时间
MCP2按键起始地址 MCP2指示灯起始地址 发给MCP2面板的起始双字 MCP2机床面板输出的起始双字 MCP2面板总线地址 MCP2面板循环监控时间 MCP2循环时间 1=所有机床面板连接到MCP总线(没有GD参数化) 0=开始接收机床控制面板信号 1=停止接收机床控制面板信号 0=开始接收机床控制面板信号 1=停止接收机床控制面板信号 0=发送和接收机床控制面板信号 1-至接收机床控制面板信号 0=发送和接收机床控制面板信号 1-至接收机床控制面板信号 0=MCP中没有SDB210 1=激活MCP的SDB210监控 1:在DB7上复制DB77和MCP指针 只能在DB77上配置标准的SDB210 0: MPI or OPI b#16#33: PROFIBUS MCP1和MCP2 b#16#55: MSTT (网线)
1
TRUE
1 0 0..32
1..191
1..254 b#16#5 Q Q Q Q Q Q Q Q Q Q Q
OB100:FB1,DB7
CALL "RUN_UP" , "gp_par"
MCP个数::0=没有MCP存在 MCP按键起始地址 MCP指示灯起始地址
发送给机床控制面板的起始双字 机床控制面板输出的起始双字
OB100:FB1,DB7
CALL "RUN_UP" , "gp_par"
MCPNum MCP1In MCP1Out MCP1StatSend MCP1StatRec MCP1BusAdr MCP1Timeout MCP1Cycl MCP2In MCP2Out MCP2StatSend MCP2StatRec MCP2BusAdr MCP2Timeout MCP2Cycl MCPMPI MCP1Stop MCP2Stop MCP1NotSend MCP2NotSend MCPSDB210 MCPCopyDB77 MCPBusType BHG BHGIn BHGOut BHGStatSend BHGStatRec BHGInLen BHGOutLen BHGTimeout BHGCycl BHGRecGDNo BHGRecGBZNo BHGRecObjNo BHGSendGDNo BHGSendGBZNo BHGSendObjNo BHGMPI BHGStop BHGNotSend NCCyclTimeout NCRunupTimeout
WORD S7_POINTE R S7_POINTE R S7_POINTE R S7_POINTE R WORD ULONG ULONG
WORD
ULONG ULONG
VKE_TYPE
b#16#55: 以太网 只有IE装置 只有IE装置 激活查询 来自方式组的方式组号 来自通道的通道号 来自轴的轴号 有效通道的字符串 有效轴的字符串 机床输入数据DB20的整数号 机床输入数据DB20的十六进制号 机床输入数据FB20的实数号 类型 (HT2, HT8, ...) PLC输入数据信息长度 PLC输出数据信息长度
1 P#I 0.0 P#Q 0.0 P#Q 8.0 P#Q 12.0 6 S5T#700MS S5T#200MS
0
S5T#800MS S5T#80MS 2 2 1 2 1 1 1 0 0
S5T#200MS S5T#50S
ListMDecGrp NCKomm MMCToIF HWheelMMC ExtendAlMsg MsgUser UserIR IRAuxfuT IRAuxfuH IRAuxfuE UserVersion OpKeyNum Op1KeyIn Op1KeyOut Op1KeyBusAdr Op2KeyIn Op2KeyOut Op2KeyBusAdr Op1KeyStop Op2KeyStop Op1KeyNotSend Op2KeyNotSend OpKeyBusType IdentMcpBusAdr IdentMcpProfilNo IdentMcpBusType IdentMcpStrobe MaxBAG MaxChan MaxAxis ActivChan ActivAxis UDInt UDHex UDReal IdentMcpType IdentMcpLengthIn IdentMcpLengthOut