温度控制器原理框图
控制系统框图

控制系统框图1. 引言控制系统框图是用于描述控制系统结构和组件之间关系的图表。
它通过显示控制系统中各个组件的连接和交互方式,帮助人们理解系统的工作原理和功能。
本文将介绍控制系统框图的基本概念和常用符号,并以一个简单的控制系统框图为例进行说明。
2. 控制系统框图的概念控制系统框图是一种图形化的表示方式,用于展示控制系统中各个组件之间的连接和关系。
它通常包括输入信号、控制器、执行器和输出信号等主要组件。
控制系统框图能够帮助人们直观地了解控制系统的结构和功能,方便进行系统的设计和分析。
3. 控制系统框图的符号控制系统框图使用一些特定的符号来表示各个组件和其之间的关系。
下面是一些常用的控制系统框图符号:3.1 输入信号输入信号通常用一个箭头表示,箭头的起点表示信号的源头,箭头的终点表示信号的目标。
输入信号可以是来自传感器或外部设备的信号,用于控制系统的输入。
3.2 控制器控制器通常用一个方框表示,方框内部可以包含控制器的具体功能描述。
控制器一般用于对输入信号进行处理和决策,并生成输出信号。
3.3 执行器执行器通常用一个圆形表示,圆形内部可以包含执行器的具体功能描述。
执行器用于接收控制器生成的输出信号,并执行相应的动作。
3.4 输出信号输出信号通常用一个箭头表示,箭头的起点表示信号的源头,箭头的终点表示信号的目标。
输出信号可以是执行器生成的动作信号,或者是控制系统的输出结果。
4. 示例控制系统框图下面是一个简单的控制系统框图示例,用于控制房间的温度:输入信号(外部温度)→ 控制器(温度调节器)→ 执行器(加热器)→ 输出信号(房间温度)该控制系统框图中,输入信号为外部温度信号,控制器为一个温度调节器,执行器为一个加热器,输出信号为房间的温度。
控制器根据输入信号判断房间温度的变化,并控制加热器的工作来调节房间温度。
5. 总结控制系统框图是描述控制系统结构和组件之间关系的图表。
它通过显示控制系统中各个组件的连接和交互方式,帮助人们理解系统的工作原理和功能。
机械式温度控制器原理
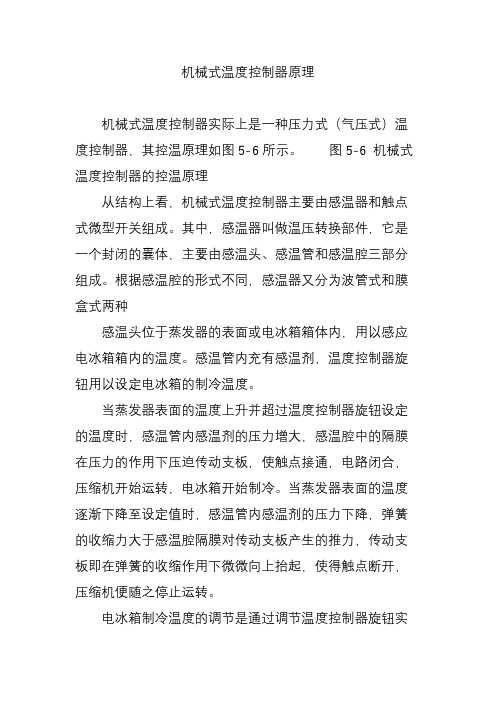
机械式温度控制器原理机械式温度控制器实际上是一种压力式(气压式)温度控制器,其控温原理如图5-6所示。
图5-6 机械式温度控制器的控温原理从结构上看,机械式温度控制器主要由感温器和触点式微型开关组成。
其中,感温器叫做温压转换部件,它是一个封闭的囊体,主要由感温头、感温管和感温腔三部分组成。
根据感温腔的形式不同,感温器又分为波管式和膜盒式两种感温头位于蒸发器的表面或电冰箱箱体内,用以感应电冰箱箱内的温度。
感温管内充有感温剂,温度控制器旋钮用以设定电冰箱的制冷温度。
当蒸发器表面的温度上升并超过温度控制器旋钮设定的温度时,感温管内感温剂的压力增大,感温腔中的隔膜在压力的作用下压迫传动支板,使触点接通,电路闭合,压缩机开始运转,电冰箱开始制冷。
当蒸发器表面的温度逐渐下降至设定值时,感温管内感温剂的压力下降,弹簧的收缩力大于感温腔隔膜对传动支板产生的推力,传动支板即在弹簧的收缩作用下微微向上抬起,使得触点断开,压缩机便随之停止运转。
电冰箱制冷温度的调节是通过调节温度控制器旋钮实现的。
当调整温度控制器旋钮时,温度控制器旋钮便带动调温凸轮转动,从而使温度控制板控制弹簧的张力。
图5-7为温度控制器的调温凸轮与温度控制板的关系示意图。
图5-7 调温凸轮与温度控制板的关系示意图调整温度控制器旋钮时,旋钮的转动实际上就带动调温凸轮转动,便会造成温度控制板的前移或后移,从而控制弹簧拉力的增大或缩小。
若弹簧拉力较大,就需要待蒸发器温度较高时使感温剂压力增大,产生较大的推动力使得传动支板前移,推动触点闭合,压缩机才会启动工作。
这就是调高电冰箱温度的方法。
反之,若弹簧拉力较小,当蒸发器温度稍微升高时,感温剂所产生的压力就足以推动传动支板,使触点闭合,启动压缩机工作,这样就将电冰箱的制冷温度调低了。
图5-7中的温度调节螺钉是用来调整温度范围的,将该螺钉顺时针转动(右旋),相当于加大了弹簧的拉力,使得温控点升高。
如果电冰箱出现不停机的故障,可将该调节螺钉顺时针旋转半周或一周。
温度控制器的工作原理

温度控制器的工作原理1. 温度控制器的定义与分类温度控制器是一种可编程控制器,主要用于控制热处理设备、热风炉、烤炉等工业领域中的温度。
根据其工作原理和应用场所的不同,温度控制器通常分为机械式温度控制器、电气式温度控制器和电子式温度控制器三种。
2. 机械式温度控制器的工作原理机械式温度控制器是一种最早的控温方式,由丝簧、传动杆、调节旋钮、电触点等部件组成。
当机械式温度控制器和温度探头相连后,随着温度变化,丝簧的形态也随之发生相应的变化,由此推动传动杆的运动,改变触点的开闭状态,从而控制温度的升降。
机械式温度控制器的优点是成本低廉,但其精度很难达到高精度温度控制的要求。
3. 电气式温度控制器的工作原理电气式温度控制器是通过电路的控制实现温度的测控。
其主要由温度探头、比较器、反馈电路等部件组成。
当温度探头采集到温度信号后,将信号通过比较器与设定温度进行比较,产生反馈信号。
反馈信号再经过比较和控制后,通过触点对电路进行控制,直接控制对应的工业设备,从而达到对温度进行控制的目的。
此控温方式的优点是精度高、维修方便,但适用范围有限,只适用于一些有明确要求或固定值的场合。
4. 电子式温度控制器的工作原理电子式温度控制器是集成电路控制的温度控制器,也是目前最常用的温度控制方式。
电子式温度控制器主要包括温度传感器、微处理器、触摸屏、LCD 显示器、输出驱动器等部分。
当温度传感器采集到温度信号后,将信号转换为数字信号,经由微处理器进行数字控制和比较后再通过输出驱动器控制工业设备,实现对温度的调控。
电子式温度控制器具有精度高、抗干扰能力强、实时性高等优点,同时由于方便维修和升级,所以应用范围非常广泛。
5. 温度控制器的在应用中的注意事项温度控制器在应用中需要注意以下几个方面:1. 应正确安装温度检测探头,不得插反或插松导致数据失真或误差。
2. 温度控制器应常保干燥,防潮,并清洁掉尘土等杂物。
3. 控制器应调整到合适的参考数值,依据具体生产要求选择恰当的PID调节参数,精确控制温度。
简单的温度控制器设计原理
简单的温度控制器设计原理温度控制器是一种用于控制某个系统或装置的温度的设备,可以自动调节温度并保持在特定范围内。
它通常由传感器、控制器、执行器等组成,通过不断监测环境温度,计算偏差并作出相应的调整来实现温度控制。
温度控制器的设计原理涉及到传感器、控制器和执行器的协同工作。
其中传感器用于检测环境温度,并将检测到的温度信号转化为电信号;控制器则对传感器的信号进行处理,计算出温度的偏差,并根据预设的控制算法作出相应的调节策略;执行器则根据控制器的指令,实现对系统的温度调节。
在温度控制器中,传感器是非常重要的一部分,通过传感器的准确测量,可以实现对环境温度的实时监测。
常见的传感器包括热电偶、热敏电阻、红外线传感器等。
这些传感器可以将温度转化为电信号,并通过连接到控制器的电路进行传递。
控制器是温度控制器的核心部件,主要负责对传感器的信号进行处理,并生成控制信号。
控制器通常包括一个微处理器或控制芯片,用于计算温度的偏差,并根据预设的控制算法来调节温度。
控制器通常具有一定的的控制逻辑,可以根据具体的场景要求来进行温度的控制模式选择。
执行器则是根据控制器发出的指令来实现温度调节的部分。
常见的执行器包括加热装置、冷却装置、换向阀等。
执行器的作用是根据控制器的指令来实现相应的温度调节操作,例如调节加热元件功率、打开或关闭冷却设备等,以使系统的温度保持在目标范围内。
整个温度控制器的工作过程可以描述为下面的流程:首先,传感器不断地检测环境温度,并将检测到的温度数据转化为电信号。
然后,控制器接收到传感器的信号后,计算出温度的偏差,并根据预设的控制算法生成控制信号。
最后,执行器根据控制器发出的控制信号来进行相应的操作,从而实现对系统温度的调节。
温度控制器的设计目标是使系统的温度能够稳定地控制在预设的目标范围内,以满足特定的环境要求。
为了实现这个目标,温度控制器的设计需要考虑以下几个方面:首先,传感器的选择和校准是非常重要的,确保传感器能够准确地反映环境温度。
温度控制器的工作原理
温度控制器的工作原理文件编码(GHTU-UITID-GGBKT-POIU-WUUI-8968)温度控制器的工作原理据了解,很多厂家在使用温度控制器的过程中,往往碰到惯性温度误差的问题,苦于无法解决,依靠手工调压来控制温度。
创新,采用了PID模糊控制技术,较好地解决了惯性温度误差的问题。
传统的温度控制器,是利用热电偶线在温度化变化的情况下,产生变化的电流作为控制信号,对电器元件作定点的开关控制器。
电脑控制温度控制器:采用PID 模糊控制技术 *用先进的数码技术通过Pvar、Ivar、Dvar(比例、积分、微分)三方面的结合调整形成一个模糊控制来解决惯性温度误差问题。
传统的温度控制器的电热元件一般以电热棒、发热圈为主,两者里面都用发热丝制成。
发热丝通过电流加热时,通常达到1000℃以上,所以发热棒、发热圈内部温度都很高。
一般进行温度控制的电器机械,其控制温度多在0-400℃之间,所以,传统的温度控制器进行温度控制期间,当被加热器件温度升高至设定温度时,温度控制器会发出信号停止加热。
但这时发热棒或发热圈的内部温度会高于400℃,发热棒、发热圈还将会对被加热的器件进行加热,即使温度控制器发出信号停止加热,被加热器件的温度还往往继续上升几度,然后才开始下降。
当下降到设定温度的下限时,温度控制器又开始发出加热的信号,开始加热,但发热丝要把温度传递到被加热器件需要一定的时候,这就要视乎发热丝与被加热器件之间的介质情况而定。
通常开始重新加热时,温度继续下降几度。
所以,传统的定点开关控制温度会有正负误差几度的现象,但这不是温度控制器本身的问题,而是整个热系统的结构性问题,使温度控制器控温产生一种惯性温度误差。
要解决温度控制器这个问题,采用PID模糊控制技术,是明智的选择。
PID模糊控制,是针对以上的情况而制定的、新的温度控制方案,用先进的数码技术通过Pvar、Ivar、Dvar 三方面的结合调整,形成一个模糊控制,来解决惯性温度误差问题。
LDB10干式变压器温度控制器
LD-B10-B220系列干式变压器温度控制器使用说明书2007年12月目录1、概述-----------------------------------------------42、技术指标-------------------------------------------43、工作原理-------------------------------------------54、型号与功能分类-------------------------------------65、面板-----------------------------------------------76、传感电缆总成---------------------------------------77、操作与显示-----------------------------------------88、功能模块-------------------------------------------99、B10-B220E电流输出型-------------------------------1410、B10-B220F通讯型-----------------------------------1411、现场故障处理小常识-------------------------------1612、接线端子定义-------------------------------------16附录 ----------------------------------------19一、概述LD-B10-B220系列干式变压器温度控制器(以下简称温控器)的主要设计特点有:▲采用WATCHDOG(看门狗)技术,可以让温控器避免进入死循环。
▲采用线性度高的铂电阻(Pt100)与非线性的热敏电阻(PTC)共同进行绕组温度检测与控制,大大地提高了系统的可靠性。
温度控制器的工作原理
温度控制器的工作原理
温度控制器是一种用于控制温度的设备,它可以通过测量温度并根据设定的温度范围来控制加热或冷却设备的工作。
温度控制器的工作原理可以分为三个部分:传感器、控制器和执行器。
传感器是温度控制器的核心部件,它可以测量环境温度并将其转换为电信号。
常见的传感器有热电偶、热敏电阻和红外线传感器等。
不同的传感器适用于不同的环境和温度范围。
控制器是温度控制器的大脑,它可以接收传感器发出的信号并根据设定的温度范围来控制加热或冷却设备的工作。
控制器通常采用微处理器或单片机来实现,可以实现精确的温度控制和多种控制模式。
执行器是温度控制器的输出部件,它可以根据控制器的指令来控制加热或冷却设备的工作。
常见的执行器有继电器、晶体管和三极管等。
不同的执行器适用于不同的负载和电压等级。
温度控制器的工作原理可以简单概括为:传感器测量环境温度并将其转换为电信号,控制器接收传感器发出的信号并根据设定的温度范围来控制执行器的工作,执行器根据控制器的指令来控制加热或冷却设备的工作。
通过这种方式,温度控制器可以实现精确的温度控制,保证设备的正常运行和产品的质量稳定。
自动控制原理

dt
原式拉氏变换后得: s 2 C(s) 2sC(s) 2C(s) 1
c(t) r(t) 1 1 C( s ) 2 s 2 s 2 ( s 1 )2 1
c(t ) e sin t
t
0
t
R1
I1(s)
U1(s)
R2
I2(s)
Ur ( s )
sc1
1 C 1
C(s)=
R(s)[ G3G2 (1-G1H1) +G1G2 ] + G2 (1-G1H1)N(s)
1 - G1H1 + G2H2
+ G1G2H3 - G1H1G2 H2
G3(s) R(s) R(s) R(s) R(s)
梅逊公式求E(s)
D(s) D(s) D(s)
G2(s) C(s) C(s) C(s)
H3(s)
H 3(s) H (s) H (s) 3 3
C(s)
R(s)
G2 H3 E(S) P1= – P =1 1 H1(s)
1= 1 H △△ =1+G 1 2 H 2 2(s)
E(s)=
第四节 动态结构图
二、 动态结构图的等效变换与化简
系统的动态结构图直观地反映了系统 内部各变量之间的动态关系。将复杂的动 态结构图进行化简可求出传递函数。
1.动态结构图的等效变换
等效变换:被变换部分的输入量和输出量
之间的数学关系,在变换前后 保持不变。
Ur(s)
R1
1
sc1
1
1
1 R2
sc2
1
Uc(s)
第四节 动态结构图
例 求系统传递函数。 解: R(S) R(S) R(S) _ R(S) (1) 用梅逊公式 _ _ _ P4 L= –– GG )s G ) 2 (s ) 1= 1(s 1(