基于FPGA的超声波测距系统设计详解
基于FPGA的高精度超声波测距系统的设计

基于FPGA的高精度超声波测距系统的设计汪才杰;张大名;张米露【期刊名称】《微型机与应用》【年(卷),期】2012(031)017【摘要】This paper designes an FPGA-based high-precision ultrasonic ranging module. For chip timing and signal processing, the Cyclone II series EP2C5T144C8 is used to design logic circuit module such as timing generator, high-speed counting, echo identification, variable threshold control, which can process signal quickly and orderly. In the speed of sound, it adds temperature compensation module to avoid the bias values which are introduced by the use of the fixed velocity, thereby improvingthe system accuracy. The system has high reliability, high integration and fast response characteristics. Experiments show that the relative error is less than 0.3% away from the obstacle 600 mm to 3 600 ram, the measurement accuracy is greatly improved.%设计了一种基于FPGA的超声波测距模块。
基于FPGA的超声波与红外测距的PWM控制
LOGO
Contents
功能设计
系统框图
超声波测距
红外测距
PWM控制 控制
Company Logo
功能设计
1,为了使移动小车能自动避障行走,就必须装备测 距系统,以使其及时获取距障碍物的距离信息 (距离和方向)。 2,基于此,系统介绍的三方向(前、左、右)超声 波与红外线测距系统,就是为小车了解其前方、 左侧和右侧的环境而提供一个运动距离信息。 3,利用传感器采集到的数据实时控制安装在小车前 端小轮上的两个电机,以实现自动跟随的目的。
为什么不用模拟电路控制: 1,模拟电路容易随时间漂移,因而难以调节 2,模拟电路笨重、昂贵 3,模拟电路功耗较高 4,模拟电路对噪声比较敏感
Company Logo
PWM的优点: 1,控制信号都是数字形式,无需数模转换 2,抗噪声能力曾强 3,可实现超远距离通信
logo基于fpga的超声波与红外测距的pwm控制companylogowwwthemegallerycomcontents功能设计系统框图超声波测距红外测距pwm控制功能设计1为了使移动小车能自动避障行走就必须装备测距系统以使其及时获取距障碍物的距离信息距离和方向
基于FPGA的超声波与红外测距的 PWM控制
红外线传感器测距
Company Logo
红外线测距
原理: 红外线传感器包括光学系统、检测元件和 转换电路。光学系统按结构不同可分为透 射式和反射式两类。检测元件按工作原理 可分为热敏检测元件和光电检测元件。热 敏元件应用最多的是热敏电阻。热敏电阻 受到红外线辐射时温度升高,电阻发生变 化,通过转换电路变成电信号输出。光电 检测元件常用的是光敏元件,通常由硫化 铅、硒化铅、等材料制成。
基于FPGA的超声波阵列测量定位系统设计

S = ( 33.145 + 0.607T ) t
(1)
式中,T 为环境温度。本文采用 TDoA 的方式测量距离,
即信号源通过蓝牙向超声波阵列发送开始测量信息,由
于电磁波的传播速度为 3 × 108 m/s,而超声波的传播速
本文基于 FPGA 硬件平台设计一套超声波阵列测 量 系 统 ,能 够 通 过 蓝 牙 先 接 收 信 源 发 来 的 同 步 信 号 ,并 采用 TDoA(Time Difference of Arrival )的方式分别测量
收稿日期:2017⁃08⁃28
修回日期:2017⁃10⁃27
基金项目:辽宁省教育厅项目(2017FWDF06)
1 超声波定位原理
超声波一般是指频率大于 20 kHz 的机械振动波。
超声波测距可采用传播时间检测法进行,即测量超声波
从发射换能器发出经空气传播到接收换能器的传播时
间 t,将 t 与其在空气中的传播速度 v 相乘,就得到超声
波此时的传播距离 S。由于超声波在空气中的传播速
度与温度相关[8⁃10],则传播距离为:
陈志彬,宋金堂,张 娜,乔怡豪
(辽宁科技大学,辽宁 鞍山 114051)
摘 要:为了实现对移动物体进行定位,提高超声波定位的精度,基于可编程逻辑门列阵(FPGA),设计一个 SoC 硬件
测量平台,对超声波信源到超声波接收阵列的角度和距离测量实现高精度定位。为提高系统的测量精度,补偿温度对测量
结果产生的影响,增加了温度传感器测量环境温度。在程序设计上将 TDoA 与 AoA 融合,并结合 MUSIC 算法,以提高测量的
精度。实际实验测量表明,该测量系统运行稳定可靠,测量速度快、精度高,有一定的实用性和推广价值。
基于FPGA的超声波双向测距报警系统

在1602显示屏上显示相关内容
判断测量距离与警戒距离的相差的程度
学会运用LCD1602的指令即可,注意LCD1602指令执行的延时
测量距离乘以2、3、4倍再分别与警戒距离比较
作品展示:
心得体会:
一开始,我们三个人只是抱着试一试的心态报名参加了这个比赛,因 为我们感觉自己的理论基础不够扎实,对于Verilog语言也没有很多的接触, 只在数电的课本上看过,而实际运用却很少。花费了一段时间,我们才确 定了做超声波测距及报警的项目,觉得这个项目实用性较强,难度对于我 们来说恰到好处。 在主体代码的编写过程中,出现的问题不是很大,都是一些小问题, 通过软件的提示和仔细的查找修改就可以解决。在仔细阅读了HC-SR04超声 波测距模块的使用说明后,连接外部电路也没有太大的问题。而在LCD1602 液晶显示屏的使用过程中,出现了比较大的问题。由于对该种显示屏之前 没有接触以及没有好好阅读相关资料,导致编写代码的时候指令之间没有 时间间隔,显示出现混乱。经过一段时间的研究之后我们才纠正了这个错 误。 对于这次的比赛,我们都从中学到了许多,将我们的课程学习和动手 操作很好地结合在一起,提高了我们的专业水平。
超声波从发射到接受的时间,从而计算得到距离;
2.
通过按键调整警戒距离,比较测得的距离与警戒距离的差别。当测得的距离 小于警戒距离时,就让蜂鸣器鸣响警报,同时根据测得的距离与警戒距离的
相差的程度,控制不同数目的LED灯闪烁;
3.
将测得距离和警戒距离都显示在LCD1602液晶显示屏上; 两个超声波模块各测一个方向的距离,两个方向共用一个蜂鸣器鸣响警报, 但LED灯闪烁警报分开使用。
Thank You !
关键问题:
基于FPGA的超声波测距系统设计详解

基于FPGA的超声波测距系统设计详解超声波测距是一种非接触式测量技术,具有定向性好以及对色彩、光照度、外界光线和电磁场不敏感的优点,当被测物处于黑暗、有灰尘或烟雾、强电磁干扰及有毒等恶劣的环境时,超声波有很强的适应性。
因此超声波传感器广泛用于工业测量、安全预警、车辆避障、自动导航以及现场机器人等相关领域。
目前绝大多数超声波测距系统都是以单片机作为信号发生和控制器,其测量精度严重受限于单片机的晶振频率(1.2 MHz~24 MHz),往往难以令人满意。
而且用单片机控制的测距系统需要辅助设计较多的由分立元件组成的外部模拟电路,故其抗干扰性能也相对较差。
FPGA作为一种高密度可编程器件,其内部可以集成较大规模的逻辑单元,适用于时序、组合等各种逻辑电路应用场合,具有运行速度快(100 MHz以上)、内部资源丰富等特点,为开发高精确度的超声测距系统提供了新的设计方案。
为此,本文设计了一种基于FPGA的超声波测距系统,有效提升了系统整体性能。
1 超声波测距原理目前,超声波传感器的种类有很多,一般采用压电式超声波传感器。
超声波测距原理如图1所示。
超声波信号由超声波发射探头发出的同时,计数器开始计数,超声波在传输过程中遇到障碍物会反射回来(称为回波),在超声波接收探头收到回波的同时,计数器停止计数。
由速度和时间即可得到障碍物与测距装置之间的距离:S≈L=V×t/2(1)其中,S为障碍物与测距装置之间的距离,V为超声波的传播速度,t为计数器测得时间。
2 测距系统与硬件电路本超声波测距系统整体结构如图2所示,包括发射模块、接收模块、显示模块、温度补偿模块和FPGA设计模块等。
CX20106A的2引脚与GND之间连接RC串联网络,改变它们的数值便能改变芯片内部前置放大器的增益和频率特性。
增大电阻R或是减小电容C,都将使负反馈量增大,放大倍数下降;反之则放大倍数增大。
这样便可以调节超声波接收探头R的接收灵敏度。
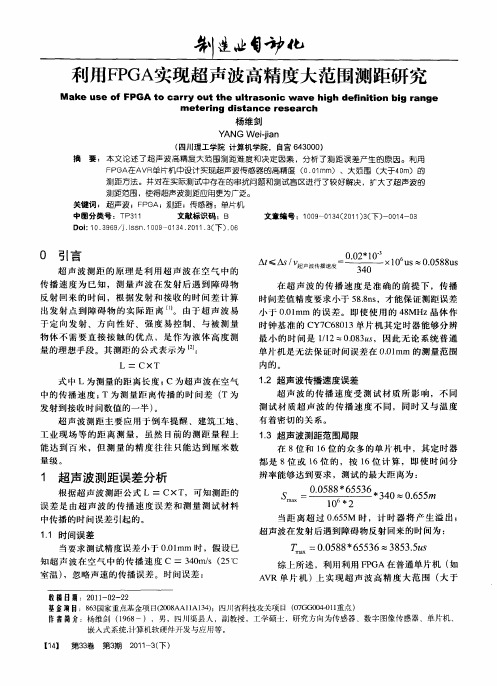
利用FPGA实现超声波高精度大范围测距研究
D i 1 .9 9 J i n 1 0 - 1 4 2 1 . ( ) 0 o : 3 6 / . s . 0 9 0 . 0 1 3 下 . 6 0 s 3
发射 到接 收时 间数值 的一 半 ) 。 超 声波 测距 主 要 应用于 倒 车提 醒 、建 筑 工地 、
工 业 现场 等 的距 离测 量 ,虽然 目前 的测 距 量程 上 能 达 到 百 米 ,但 测 量 的 精 度往 往 只能 达 到 厘米 数
量级 。
有 着密切 的关 系。 13 超声 波测 距范 围局 限 . 在 8位 和 1 的众 多 的单 片机 中 ,其 定 时器 6位
劳l 訇 化 造
利用F G P A实现超 声波高精度大 范围测距研究
M ak us e e of FPG A o c r outt t as t ar y he ulr oni a gh defnii g a c w ve hi i t on bi r nge
文章编号 :1 0 - 14 21 )( 一0 1-0 9 0 ( 0 1 3 下) 0 4 3 0 3
0 引 言
超 声 波 测距 的原 理 是 利 用 超 声 波 在 空气 中 的
/
=
x1 6 s ̄ 00 8 u 0u 58s
.
传 播 速 度 为 已知 ,测 量 声 波在 发 射 后 遇 到 障碍 物 反 射 回来 的时 间 ,根 据 发射 和 接 收 的 时 间差 计 算 出发 射 点 到 障 碍 物 的 实 际 距 离 … 由于超 声波 易 。
基于FPGA的调频连续波测距信号处理系统设计
仿真 、 合 、 综 综合后仿真 、 现、 实 布线后仿真 与验 证 、 级仿真 板 与验证等方面都有工具 " 。因此 , j 该信号处理 系统方案采用
以 FG P A为核心的信 号处理器 , 电路前端是预处理 电路 。 在预处理 电路 中, 自混 频器 的差频信 号经 高增益 、 来 大
调频连续波 的波 形参 数对微 波部件 和调频 连续 波信号
源 的设计要求较低 , 射功率 较脉 冲法也 较小 , 发 降低 了系统 对末级 功率放大器 1B压缩点 的要求 , d 这也增加 了器件芯片 的选择范 围 , 降低了整个系统的设 计难 度。 利用周期锯齿波对振荡源 V O进 行频率调 制。调频信 C
ht:/ cg jusr. o / t / sb . r v cm p o e
开发。F G P A信 号处理 系统设计原理如 图 2所示 。该 信号处
理系统 由 3个模块 , 即时 序产生 模块 siX 、 冲计数 模块 h— U 脉
p le us
—
cu tr dp组成 。其 中 ,hx one 和 s si u模块 产生 F G P A工作
号 经功率放 大后 , 通过 2个 发射 天线 辐射 出去。另外 , 调频
信号经定向耦 合器 取一 部分 能 量作 为混 频器 的本 振 信号 。
在电磁 波遇到 目标并返 回接收天线 的时间 内, 发射信号频率
收 稿 日期 :0 2— 5— 2 21 0 0 作者简介 : 李万峰 (9 9 )工 程师 , 17一 , 主要从事无线 电引信技术研究。
无测距盲 区 , 测距精度高 , 结构简单 , 体积小 。根 据发射信号
的波形可将雷 达分 为 2种体制 : 用脉 冲方式进 行距离测 量 采 的脉冲体制和采 用调频 连续波 ( MC 进行 距离测 量 的连 F W) 续波体制 。 目前 , 于调 频连 续 波 (r unym d l i ot u u 基 f q ec o u t ncni os e ao n w v ,MC 的测 距 系统能 满足人 们对 测距 精度 和 系统 在 aeF W)
基于FPGA的多通道超声波测距系统设计
收稿日期:2015 08 06; 修回日期:2015 09 07。 基金项目:天津理 工 大 学 育 苗 项 目 (LGYM201243);天 津 理 工 大 学 教 学 改 革 研 究 赞 助 项 目 (YB12-09)。 作者简 介:刘 君 (1980 ),男,天 津 人,博 士 在 读,讲 师,主 要 从 事 信号检测与处理方向的研究。
0 引 言
超声波具有稳定性强、易于制造、价格低廉、无辐射等优 点,在多个领 域 有 着 广 泛 应 用[1]。 通 常 谐 振 频 率 高 于 20kHz 的声波称为超声波,频率越高,反射能力越强,而绕射能力越 弱 。 [12] 利 用 超 声 波 的 这 种 特 性 , 常 常 用 渡 越 时 间 检 测 法 进 行 距 离 的 测 量 。 [34] 传 统 设 计 方 法 多 基 于 单 片 机 设 计 , 具 有 电 路 简单,成本低等优点,但无法满足现代测距立体化、多向性和 实时性的要求 。 [56] 本文设计了 一 种 基 于 FPGA 的 多 路 超 声 波 测距系统,采用渡越时间的测距原理,实现了四路超声测距通 道并行检测、同时显示,相对于传统的测量方法提高了测距的 速度与准确度,且系统具有较高的扩展性。
1 系 统 硬 件 设 计
传统的多通道超声测距系统多采用控制器顺序触发超声探 头并检测其回波信号,因此系统延时较大,无法真正实现多通 道的同时检测,因 此 本 文 设 计 了 一 种 基 于 FPGA 的 多 通 道 超 声波测距系统, 利 用 FPGA 的 并 行 处 理 的 特 点, 实 现 多 通 道 并行检测和处理,并 将 处 理 的 结 果 送 入 LCD 液 晶 显 示 器 进 行 显示,系统框图如图1所示。 11 开发板 犆犕犈_犎犚3及开发环境 犘狉犻犿犪犮犲
基于FPGA的超声波测距系统
基于FPGA的互相关无串扰超声测距系统
摘
要 :多传感器超声测距系统工作时存在超声 串扰 ,会导致测量结果失真并降低系统工作效率。为此 ,利用伪随机序列优越的
自相关性 ,通过对发射信号和回波信号进行互相关运算消除串扰 。提出一种利用异或运算代替乘法运算的并行数字相关技术捕获
算法 。可 编程 逻 辑 门阵列 ( F P G A ) 仿 真结 果表 明 ,该算 法可 以消除 实时超 声 测距 系统 的 串扰和 误码 干扰 ,明显 减少 算法运 算量 及数 据 处 理时 间 ,提 高 F P G A 逻辑 资源 利 用率 及超声 测 距系 统 的精度 。 关翻 :相 关捕获 ;伪 随机 序列 ;超 声 测距 ;超声 串扰 ;可 编程 逻 辑 门阵列
d e t e c t e d u l r t a s o n i c wa v e a n d a r t a n s mi t t e d u l t r a s o n i c wa v e .A p a r a l l e l d i g i t a l c o re l a t i o n a l g o r i t h m i s p r o p o s e d b y u s i n g x o r a n d a d d
W NG Ro n g : y a n g
,
QI A N Z h e n 。 h u a , Y I N Y o n g . h u i
( 1 . Hu z h o uI n d u s t r yAu t o ma t i c T e c h n o l o g yR&D Ce n t e r , Hu z h o uV o c a t i o n a l a n dT e c h n i c a l Co l l e g e , Hu z h o u 3 1 3 0 0 0 , C h i n a ;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于FPGA的超声波测距系统设计详解
超声波测距是一种非接触式测量技术,具有定向性好以及对色彩、光照度、外界光线和电磁场不敏感的优点,当被测物处于黑暗、有灰尘或烟雾、强电磁干扰及有毒等恶劣的环境时,超声波有很强的适应性。
因此超声波传感器广泛用于工业测量、安全预警、车辆避障、自动导航以及现场机器人等相关领域。
目前绝大多数超声波测距系统都是以单片机作为信号发生和控制器,其测量精度严重受限于单片机的晶振频率(1.2 MHz~24 MHz),往往难以令人满意。
而且用单片机控制的测距系统需要辅助设计较多的由分立元件组成的外部模拟电路,故其抗干扰性能也相对较差。
FPGA作为一种高密度可编程器件,其内部可以集成较大规模的逻辑单元,适用于时序、组合等各种逻辑电路应用场合,具有运行速度快(100 MHz以上)、内部资源丰富等特点,为开发高精确度的超声测距系统提供了新的设计方案。
为此,本文设计了一种基于FPGA的超声波测距系统,有效提升了系统整体性能。
1 超声波测距原理
目前,超声波传感器的种类有很多,一般采用压电式超声波传感器。
超声波测距原理如图1所示。
超声波信号由超声波发射探头发出的同时,计数器开始计数,超声波在传输过程中遇到障碍物会反射回来(称为回波),在超声波接收探头收到回波的同时,计数器停止计数。
由速度和时间即可得到障碍物与测距装置之间的距离:
S≈L=V×t/2(1)
其中,S为障碍物与测距装置之间的距离,V为超声波的传播速度,t为计数器测得时间。
2 测距系统与硬件电路
本超声波测距系统整体结构如图2所示,包括发射模块、接收模块、显示模块、温度补偿模块和FPGA设计模块等。
CX20106A的2引脚与GND之间连接RC串联网络,改变它们的数值便能改变芯片内部。