机械手开机操作步骤
注塑机机械手说明书

注塑机机械手说明书3、编程3 程序编辑3.1命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键3-1 File:CNC4-3C3、编程按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大3-2 File:CNC4-3C3、编程编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“MX”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
3-3 File:CNC4-3C3、编程2) 速度按键进入速度设定。
3) 计时按键进入延时功能设定。
3-4 File:CNC4-3C3、编程4)一般I/O按键进入侧姿回正等选择。
5) 成型I/O按键进入成型相关条件设定。
3-5 File:CNC4-3C3、编程6) 治具I/O按键进入治具相关功能设定。
7) 周边I/O按键进入周边相关功能设定。
3-6 File:CNC4-3C3、编程8) 回圈按键进入循环功能设定。
9) 跳跃按键进入跳转功能设定。
3-7 File:CNC4-3C3、编程10) 停止按键进入程序完成设定。
11) 宏按键进入调用已经编好的子程序。
编号为0~99共100个。
3-8 File:CNC4-3C3、编程12)堆叠按键进入装箱取物功能设定。
编号为0~3共4个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3-9 File:CNC4-3C3、编程3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面3-10 File:CNC4-3C3、编程点击档案按钮进入如下画面按钮,切换到如下画面在此页点击3-11 File:CNC4-3C3、编程点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
阿尔法机械手的操作方法

阿尔法机械手的操作方法
阿尔法机械手的操作方法可以分为以下几个步骤:
1. 软件设置:首先,确保机械手的软件已经正确安装和配置。
根据所使用的机械手型号,打开相应的软件界面。
2. 机械手定位:将机械手定位到所需的起始位置,以确保能够完成接下来的操作。
3. 编程或训练机械手:根据需要,可以使用编程语言或者机械手的训练功能来指导机械手进行特定的动作和操作。
这可以通过直接输入指令,或者通过示教(teach-in)的方式录制和编程机械手的运动轨迹。
4. 确定操作参数:根据具体的应用需求,设置机械手的操作参数,包括速度、加速度、力量等。
这些参数将影响机械手的运动和操作效果。
5. 执行操作:确认设置和参数后,启动机械手执行操作。
可以通过软件界面上的按钮或者命令来启动机械手,开始执行所编程或训练的动作。
6. 监控和调整:在机械手完成操作过程中,可以通过软件界面上的监控功能来实时观察机械手的运动路径和执行情况。
如有需要,可以随时进行调整和修改。
7. 关闭机械手:操作完成后,关闭机械手。
确保机械手回到起始位置,并断开与电源的连接。
需要注意的是,在操作机械手时要遵循相应的安全操作规程,避免造成意外伤害。
机械手操作说明书

机械手操作说明书一、简介机械手是一种自动化设备,通常用于重复、高精度的工业操控。
它由多个关节和执行器组成,可以模拟人手的动作,并在工业生产线上完成多种任务。
本操作说明书将为您提供机械手的基本操作步骤和注意事项。
二、安全操作1. 在操作机械手之前,请确保您已经接受过相关培训,并理解机械手的工作原理和操作规程。
2. 在操作机械手时,请穿戴好防护设备,如手套、护目镜等,以确保自身的安全。
3. 请确保机械手所处的工作环境符合安全要求,如地面干燥、通风良好等。
4. 不要尝试修理机械手的内部零部件,如果出现故障,请及时联系维修人员。
三、机械手操作步骤1. 开启机械手的电源,并确保电源指示灯已亮。
2. 操作控制器,选择合适的程序或模式,以实现所需的操作。
3. 通过控制器上的按钮或摇杆,控制机械手的关节和执行器进行动作。
4. 监视机械手的运动过程,确保它能够准确地执行所需的任务。
5. 在操作完成后,关闭机械手的电源,并将控制器放置在适当的位置,以防止损坏或误操作。
6. 定期清洁机械手的表面,确保其正常运行,并使用合适的润滑剂,保持关节的灵活性。
7. 如遇到故障或异常情况,请及时报告给上级或维修人员,不要擅自进行修理。
四、操作注意事项1. 避免将手或其他物体靠近机械手的活动部件,以避免夹伤或划伤。
2. 不要超过机械手的工作负荷范围,过载可能会导致机械手的损坏或事故发生。
3. 在移动机械手时,要先确保周围没有人员或障碍物,以免发生意外碰撞。
4. 当机械手执行任务时,请远离其工作范围,以免受伤。
5. 勿将机械手用于不适合的环境或任务,以免造成损坏或安全风险。
五、维护和保养1. 定期检查机械手的零部件,包括关节、执行器、传感器等,如有损坏或磨损,请及时更换。
2. 确保机械手的电气系统正常工作,如有异常,请及时检修或更换电气元件。
3. 定期清洁机械手的内部和周围的工作区域,以去除积尘、油污等物质。
4. 根据生产计划和实际使用情况,对机械手进行定期保养,包括润滑、调整等工作。
ABB机械手操作步骤
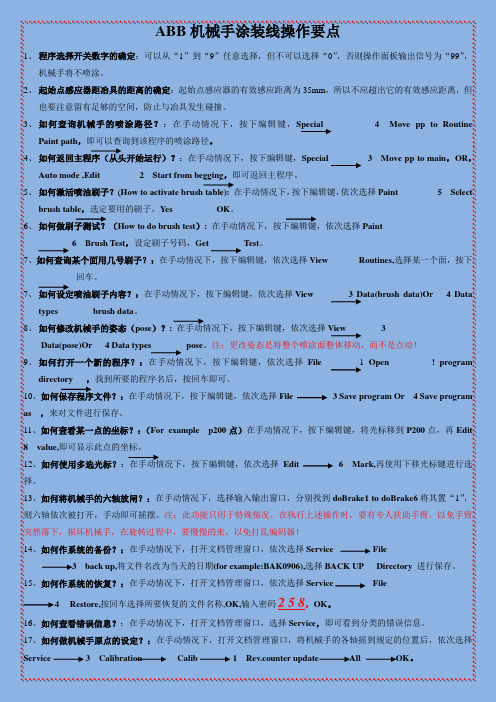
ABB机械手涂装线操作要点1、程序选择开关数字的确定:可以从“1”到“9”任意选择,但不可以选择“0”,否则操作面板输出信号为“99”,机械手将不喷涂。
2、起始点感应器距冶具的距离的确定:起始点感应器的有效感应距离为35mm,所以不应超出它的有效感应距离,但也要注意留有足够的空间,防止与冶具发生碰撞。
3、如何查询机械手的喷涂路径?:在手动情况下,按下编辑键,Special 4 Move pp to RoutinePaint path,即可以查询到该程序的喷涂路径。
4、如何返回主程序(从头开始运行)?:在手动情况下,按下编辑键,Special 3 Move pp to main,OR,Auto mode ,Edit 2 Start from begging,即可返回主程序。
5、如何激活喷油刷子?(How to activate brush table):在手动情况下,按下编辑键,依次选择Paint 5 Selectbrush table,选定要用的刷子,Yes OK。
6、如何做刷子测试?(How to do brush test):在手动情况下,按下编辑键,依次选择Paint6 Brush Test,设定刷子号码,Get Test。
7、如何查询某个面用几号刷子?:在手动情况下,按下编辑键,依次选择View Routines,选择某一个面,按下回车。
7、如何设定喷油刷子内容?:在手动情况下,按下编辑键,依次选择View 3 Data(brush data)Or 4 Datatypes brush data。
8、如何修改机械手的姿态(pose)?:在手动情况下,按下编辑键,依次选择View 3Data(pose)Or 4 Data types pose。
注:更改姿态是将整个喷涂面整体移动,而不是点动!9、如何打开一个新的程序?:在手动情况下,按下编辑键,依次选择File 1 Open ! programdirectory ,找到所要的程序名后,按回车即可。
机械手开机操作步骤

机械手开机操作步骤
开机准备:
1.接通机械手及液压设备的电源、气源。
2.启动液压机,并把液压机上、下模调回正常位置,修边机相同,
处理后把设备全部转入自动生产模式。
3.打开机械手急停开关,等待机械手自动定位完成,并转入自动生
产模式。
启动前操作:
1.补充工件:
1)在液压机模具上放上一个工件;
2)在二道机械手的工件位置上补齐3个工件;
注:缺少工件时,机械手将报警,如可以按“复位”键恢复运行。
2.检查一道机械手滚油输送带上是否有1张圆片,如果没有则人工
补充1张圆片。
启动操作
按下一道机械手的“启动按钮”或点击控制屏上的“启动”键,即可启动。
报警处理
一道拉伸失效:
检查模具上是否有一张圆片,如有,人工按下液压机拉伸按钮进行一次工件拉伸,即可自动回复生产。
一道计量失效:
检查计量托台上是否有多张圆片或者没有圆片,请人工处理计量托台上只有1张圆片后,点击控制屏上的“复位运行”键,即可回复生产。
二道真空吸件失效:
检查对应的吸盘,是否出现不合格工件,如有则人工清除掉该工件之后,点击二道控制屏上的“复位”键,即可回复生产。
注:如不熟练报警处理方法,请停机处理后,再重新启动生产。
伟立机械手说明书(1)
进至 700
i、点击“吸夹动作”,选取 SV1 吸盘输出、SG1 夹具 1 输出,单击“插入”;
j、插入 Z1 上升至 0;
k、点击“轴动作”设置 X 横入至 0,继续单击“同动轴”,选取 Y1 后退至 0;
l、返回 是否退出教导界面 是
5.1.2 运行新建模组
退出教导后,按 STOP 键切换到主画面,过程如下:
003 前进,Y1:0.0 700.0 004 吸夹,吸 1 通,夹 1 通 005 后退,Y1:700.0 0.0
006 上升,Z1:400.0 0.0 007 横出,X:0.0 900.0 008 下降,Z1:0.0 400.0
009 前进,Y1:0.0 700.0 010 吸夹,吸 1 断,夹 1 断
5
a、当手臂要下降时,要特别注意手臂是在安全区域内。 b、操作前,请先确认人员是否在手臂行程范围外。 c、如不遵守此忠告,可能发生设备损坏或人员伤害
手动界面下包括轴、吸夹、备用。 X:主手臂、副手臂的横行坐标 Y1:主手臂的引拔坐标 Y2:副手臂的引拔坐标 Z1:主手臂下移坐标 Z2:副手臂下移坐标 C:侧姿的位置(水平/垂直)
4.2.5 修改 修改 在此可修改轴行程(每次最大调整距离为 1mm),轴运行等待的延 时,及运行速度。
进入主画面后点击 修改 ,进入修改界面,显示如下:
4.2.6 复位 复位 机械轴回归原点。
7
进入主画面后点击 复位 ,进行复位。
复位
是
4.2.7 试运行
试运行 测试当前模组是否符合模具要求(注:试运行模式不能替代全自 动运行)
全伺服系列
1
2
1、按键与开关的功能说明 1)紧急停止按钮
当有异常状况发生时,按下此钮,设备会立即停止运转并发出警报音,提醒 使用者设备异常。 2)使用/不使用开关 如若不使用机械手,请先确认机械手位置安全,可将此开关切换至关闭的位 置,此时手控器不可使用;需要使用时,可将此开关切换至开启的位置,手 控器可正常使用。 3)语言切换快捷键 一键切换提示语言。提示语言种类的选择也可在开机时进行。 4)自动运行 运行程序的开启键。在试运行/全自动中,当系统出现“请按左上角绿色 RUN
机械手技术标准

设备编号机械手技术标准文件编号:P/MAJXS0012014通用发行日期:2014-02-13一、仪器设备简述:1)用途:用于自动化生产,代替人工操作。
对电表进行抓取。
二、工作环境:1)环境温度:无2)相对湿度:无3)干扰源:无4)其他要求:(主要是气压、电源、接地、信号线等特殊要求)三、设备技术参数;型式:可程式露天机械臂设计。
组成部件:XYZ三轴机械臂,传动电机,马达驱动,可编程主控板。
工作电压:单相交流220v50Hz安全保护:漏电保护、卡表保护等。
使用要求:可在线体上对电表进行感应抓取,并自动扫描条码。
条码扫描器可手动进行调节,使用过程中便于维修及维护保养。
符合生产噪音要求。
四、操作步骤:一部分:联机操作:1.上电开机。
(使用前务必对机械手进行维护点检)接通机械手主控电源,确认主控箱屏显内容正常:00坐标X轴保存位置选择00 微调+002.确认机械手恢复到原点位置。
XYZ三轴的感应电。
3.此时即可与电脑或自动工装进行联机操作。
二部分:脱机微调:1.上电开机接通机械手主控电源,至屏显如下所示2.调节表位电表放置位置 1.第一表位位置左右微调:左右键将光标移动至xyz 三轴选择处,按上下键选择X 轴, 按左右键旋至左上角00处,按上下键至位置选择变为0506,按左右键选择至微调,输入微调数值,点击+或者-,+表示远离电机方向,—表示靠近点击方向。
2.第一表位前后位置微调:在左右微调基础上,将光标旋至Y 轴。
按左右键选择至微调,输入微调数值,点击+或者-,+表示远离电机方向,—表示靠近点击方向。
3.第二三表位前后左右微调:第二三表位前后左右微调方法同第一表位,在X 轴坐标选择上分别为第二表位0708,第三表位0910 3.调节机械手取放表位置。
五、 注意事项:(重点是安全事项说明)1. 保养机器时禁止将身体各部位进入设备内部,防止设备运行对人体造成伤害2. 配电箱中非操作人员禁止打开,配电箱中线路密布,以免高压电伤人3. 机械臂运行过程中,严禁人身接触。
可为精密机械手面板按键说明书

可为精密机械手面板按键说明书一、精密机械手面板按键简介精密机械手面板按键是指安装在机械手操作界面上的各种功能按键,它们用于控制机械手的运行状态和实现各种功能。
本文将为大家详细介绍精密机械手面板按键的功能及操作方法,帮助大家更好地掌握机械手的使用技巧。
二、面板按键功能及操作方法1.电源开关:用于控制机械手的开启和关闭。
在开启机械手前,请确保电源开关处于关闭状态,以免发生意外。
2.模式切换:用于在不同工作模式间切换。
一般来说,精密机械手具有手动模式、自动模式等多种工作模式,用户可以根据实际需求进行切换。
3.速度调节:用于调整机械手的运动速度。
速度调节按钮通常有多个档位,用户可以根据实际操作需求选择合适的速度档位。
4.抓手松开/收紧:用于控制机械抓手的开合。
在抓取物品时,请确保抓手已经完全收紧,以确保物品的稳定。
5.复位按钮:用于将机械手恢复到初始位置。
在机械手出现故障或需要重新开始操作时,可以使用此按钮进行复位。
6.故障自检:用于检测机械手是否存在故障。
当机械手出现异常时,故障自检按钮会发出提示信号,帮助用户及时发现并解决问题。
三、面板按键维护与保养为确保精密机械手面板按键的正常使用,用户需定期对其进行维护和保养。
具体措施包括:1.保持面板按键清洁,避免灰尘和污渍影响按键灵敏度;2.定期检查按键连接线,确保连接良好,避免因线缆损坏导致故障;3.避免在高温、潮湿、腐蚀性环境中使用,以免影响按键的使用寿命。
四、安全注意事项在使用精密机械手面板按键时,请务必遵守以下安全注意事项:1.在操作机械手前,请确保已阅读并理解操作说明书;2.操作过程中,请勿将手或身体部位伸入机械手工作区域,以免发生意外伤害;3.遇到故障时,请及时关闭电源,并联系专业人员进行维修;4.定期检查机械手状态,确保其正常运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械手开机操作步骤
开机准备:
1.接通机械手及液压设备的电源、气源。
2.启动液压机,并把液压机上、下模调回正常位置,修边机相同,
处理后把设备全部转入自动生产模式。
3.打开机械手急停开关,等待机械手自动定位完成,并转入自动生
产模式。
启动前操作:
1.补充工件:
1)在液压机模具上放上一个工件;
2)在二道机械手的工件位置上补齐3个工件;
注:缺少工件时,机械手将报警,如可以按“复位”键恢复运行。
2.检查一道机械手滚油输送带上是否有1张圆片,如果没有则人工
补充1张圆片。
启动操作
按下一道机械手的“启动按钮”或点击控制屏上的“启动”键,即可启动。
报警处理
一道拉伸失效:
检查模具上是否有一张圆片,如有,人工按下液压机拉伸按钮进行一次工件拉伸,即可自动回复生产。
一道计量失效:
检查计量托台上是否有多张圆片或者没有圆片,请人工处理计量托台上只有1张圆片后,点击控制屏上的“复位运行”键,即可回复生产。
二道真空吸件失效:
检查对应的吸盘,是否出现不合格工件,如有则人工清除掉该工件之后,点击二道控制屏上的“复位”键,即可回复生产。
注:如不熟练报警处理方法,请停机处理后,再重新启动生产。