MATCH-AT空三加密软件操作手册
第六章-空三加密

第六章-空三加密第六章空三加密空三加密即解析空中三角测量,指的是用摄影测量解析法确定区域内所有影像的外方位元素。
空三加密的传统做法是利用少量控制点的像方和物方坐标,解求出未知点的坐标,使得每个模型中的已知点都增加四个以上,然后利用这些已知点解求所有影像的外方位元素。
这中间包含一个已知点由少到多的过程,所以形象地称之为空三加密。
概括地讲,空三加密的目的可以分为两个方面:第一是用于地形测图的摄影测量加密;第二是高精度摄影测量加密,用于各种不同的目的(张剑清,2003)。
本章以MapMatrix系统空三加密相关模块AATMatrix的操作流程为例介绍空三加密的主要流程,包括单像空间后方交会、GPS辅助空三、GPS/IMU联合平差、光束法区域网平差等内容。
作为补充和比较,又增加介绍了LPS空三的过程。
6.1 实习内容和要求本章的实习内容主要是空中三角测量,要求同学们能够掌握控制三角测量和光束法平差的原理方法,熟悉用AATMatrix和LPS两个软件进行空三加密的流程。
6.2 AATMatrix空三加密6.2.1 原理和操作流程概述利用测区中影像连接点(加密点)的像点坐标和少量的已知像点坐标及其大地坐标的地面控制点,通过平差计算,求解连接点的大地坐标与影像的外方位元素,称为区域网空中三角测量。
区域网空中三角测量提供的平差结果是后续的一系列摄影测量处理与应用的基础。
区域网空中三角测量按平差单元可分为航带法、独立模型法和光束法,其中光束法理论最严密、解算精度最高。
成为空三的主流方法。
光束法区域网平差的基本思想是,以每张像片为单元,区域内每张像片的控制点、加密点都列立共线条件方程式,建立全区域统一的误差方程,统一平差解算,整体解求区域内每张像片的6个外方位元素及所有加密点的地面坐标。
AATMatrix单个测区工作流程图如图6-1所示:1. 测区参数设置,包括摄影比例尺,测区编号,以及相机类型等2.相机参数的导入,注意相机文件的路径3.影像的导入,设置航带数及添加影像并且对像素大小,相机参数,相机是否反转等进行设置4.控制点导入,注意PATB不支持带字母的控制点格式并且注意路径(或GPS/IMU参数的导人,注意线元素和角元素的顺序关系)三.操作步骤:5.内定向,包括手工和自动量测两种方式6.航带连接,通过相邻相邻航带间的航带连接点确定航带间的连接关系,为后期航带间转点提供初值(如果是GPS辅助空三,不需要做航带连接)7.自动提取,通过相对定向确定航带内相临影像之间相对位置关系,以及由公共连接点来确定相对定向模型。
MapMatrix处理A3空三后数据操作手册

天工空三软件用户手册

5.5.2.9 全图显示(所有影像)............................................................ 24
5.5.2.10 多影像按比例显示................................................................. 24
5.2Pos 引导匹配 ............................................................................................... 20
5.3 精确匹配 .................................................................................................... 20
ห้องสมุดไป่ตู้
3.2 常规流程 .................................................................................................... 13
第四章
数据准备及工程创建 ................................................................................. 14
2.3 软件卸除 .................................................................................................... 10
2.4 加密狗安装................................................................................................. 12
多视几何理论辅助的无人机低空摄影测量解析空三

多视几何理论辅助的无人机低空摄影测量解析空三于瑞鹏【摘要】针对地形起伏大、高差大的测区,Inpho软件空三加密结果不理想或者无法完成空三加密.为此文中提出利用PhotoScan软件先对影像进行匹配处理,将经过优化的外方位元素,导入Inpho软件进行空三加密,两者结合,结果发现空三精度和速度大大提高.【期刊名称】《矿山测量》【年(卷),期】2017(045)006【总页数】4页(P73-75,104)【关键词】Inpho;PhotoScan;POS;外方位元素;空三加密【作者】于瑞鹏【作者单位】山东省第一地质矿产勘查院,山东济南 250014【正文语种】中文【中图分类】TD178;P231.2在摄影测量数字化成图作业时,空三加密是重要步骤之一,其方法是利用像片上的像点坐标与一些定向的控制点,采用摄影测量的方法来计算每个影像的外方位元素,然后依据摄影测量过程的几何反转,重新构建可以量测的几何立体模型,基于此方法就可以计算与像点对应的地面上点的坐标[1-2]。
由GPS定位技术获取航摄仪的位置参数,由IMU测定其姿态参数。
在无人机飞行条件下,GPS接收机定位精度很难实现高精度定位,信号容易失锁或者发生周跳,虽然修复周跳和信号失锁的方法有很多,但其定位精度和可靠性在高速度情况下也难以保证,对定位结果造成影响[3]。
利用原始的POS数据做空三加密时,结果不理想或者失败,因此如何提高空三加密的精度和速度就成为一个非常重要的研究内容。
根据生产实践,探讨PhotoScan辅助Inpho软件做空三加密的方法和技巧。
1 数据处理系统1.1 PhotoScan优化影像外方位元素流程Agisoft PhotoScan Professional是一个按照计算机视觉自动生成3D模型的软件。
采用多视图3D重建技术,可以处理具有重叠区域的图像,并且能够采用添加外部控制点的方法来生成具有真实地理空间坐标的3D模型。
可使用该软件处理航空摄影图像或高分辨率数码相机拍摄的图像。
INPHO软件自动空三加密流程
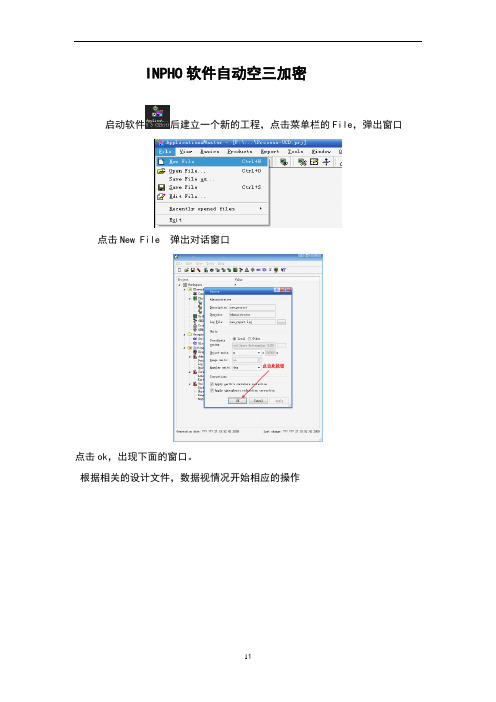
INPHO软件自动空三加密启动软件后建立一个新的工程,点击菜单栏的File,弹出窗口点击New File 弹出对话窗口点击ok,出现下面的窗口。
根据相关的设计文件,数据视情况开始相应的操作1.建立相机文件双击1弹出下面的对话窗口点击后弹出窗口填写相应的相机名称、类型、镜头类型。
点击后,弹出窗口点击,出窗口根据相机的检校文件,把相应的值填写到窗口中,由于影像经过畸变差改正所在像主点的坐标值都给定零值,点击接着点击下图中的到此相机文件就建好了。
2.导入影像数据回到project editor界面,双击Frame Type,弹出对话框。
在对话框,选择Import的第一个选项,如下图点击按钮,选中选择影像存放的工程目录文件夹点击按钮影像导入,在“”处填写飞行区域的地面平均高度值,点击按钮进行下一步点击按钮,出现下图的操作点击图中的按钮,点击下图中的按钮3.影像就导入工程完成了。
导入GPS导航数据导入航片初始坐标,即根据数据检查软件输出的XYZ坐标为初设概略航片坐标。
格式如下:# /航带分隔符11 x11 y11 z11 /航片号 X坐标 Y坐标 Z坐标12 x12 y12 z12#21 x21 y21 z2122 x22 y22 z22#⋯⋯⋯⋯#如果是GPS辅助摄影,按photoID px py pz omega phi kappa顺序导入,航带之间用“#”隔开。
接着双击下图中红线标注处双击后弹出下图的窗口点击上图中红色框标处,出现下图的对话窗口点击上图中红色框标处,出现下图的对话窗口选择根据数据检查软件输出的XYZ坐标建立的GPS导航数据后,双击图中红色框标注的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口把影像序号、坐标对应好后点击上图中的按钮出现下图的对话窗口勾选相对应的选项后点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口根据设计要求填入限差值。
Inpho软件作业指导

前言Inpho 摄影测量系统包括空中三角测量,三维立体编排,地形建模,正射影像处理和图像获取等。
空中三角测量MATCH-AT 全自动空三(支持推扫式相机ADS4)inBlock 光束法区域网平差地形建模MATCH-T 自动生成DSM/DTMDTMaster DTM/LiDAR点编辑正射影像处理OrthoMaster 生成真正射影像OrthoVista 几百幅图像一起匀色和镶嵌为了方便4D产品的生产,特编写本指导书,结合自己经验和参考手册。
许多内容通过翻译,欠妥之处,还请指正。
本书着重介绍MATCH-AT MATCH-T DTMaster OrthoMaster OrthoVista五个模块。
1.1.MATCH-AT 自动空三加密S S T T E E P P11新建工程,需要以下几个数据:数字影像相机文件外方位元素初始值外业控制资料(控制点成果和刺点片)工作内容•指定项目名称•载入近似中心(GPS、INS)•载入图像•确定单位,像素大小,照相机的名称和mount rotation,地形高度•自动设定块打开Match-AT,点击,下拉点击弹出对话窗①输入工程名和存储路径②导入航片初始坐标,即根据航摄索引图等初设概略航片坐标。
格式如下2750 388000 5000000 3000 /航片号 X坐标 Y坐标 Z坐标2749 389000 5000000 30002748 390000 5000000 3000# /航带分隔符2779 360000 4997000 30002780 361000 4997000 30002781 362000 4997000 3000#…………#如果是GPS辅助摄影,按# Strip 1759 539286.802 335214.655 1774.851 -1.8738 -0.3952 -3.4960760 539839.899 335206.408 1782.623 -1.5935 -0.3668 -3.4721761 540439.471 335192.804 1783.540 0.2288 0.8253 -3.7421# Strip 2... ... ...顺序导入,航带之间用“#”隔开。
Inpho软件在文登航空数字地形图测绘项目中的应用

Inpho软件在文登航空数字地形图测绘项目中的应用摘要:本文使用的软件inpho全数字摄影测量工作站对文登1:500航空摄影测绘项目进行空三加密,该项目使用UltraCam Eagle航摄仪进行航飞,生产1:500DLG、DEM、DOM,所以要求空三加密的精度非常高,针对在空三加密实际作业中遇到的一些实际情况和解决的办法进行分析,并对空三加密的技术流程进行了说明。
一、已有资料分析该摄区原始影像共2998张UCE原始影像,航空摄影时航向重叠度60%-65%,旁向重叠度30%-40%,旋偏角不大于15o,最大不超过25o。
在一条航线上达到或接近最大旋偏角的像片不超过3片;在一个摄区内出现最大旋偏角的像片数不超过测区像片总数的4%,另外该项目提供了初始pos数据。
根据该区的航飞情况和已有资料情况,该区域共划分为四个加密区块,根据国家空中三角摄影测量的规范,并结合着自己多年从事空三加密的工作经验,本项目像控布点的基本方案是每隔8到10条基线逐条航线布点,但是北部山区丛林密布,地形险恶,仅有个别小路,山上为数不多的几座房屋还是军事基地,禁止进入,对像控布设加大了困难,最后在北部山区布点方案放宽到16基线,航带间跨越1条航带,对空三加密带来很大的困难,并且对最终能否达到的精度也存在着很大担忧。
二、空三加密目的空三加密即解析空中三角测量,指的是利用摄影测量解析法确定区域内所有影像的外方位元素。
空三加密的传统做法是利用少量控制点的像方和物方坐标,解求出未知点的坐标,使得每个模型中的已知点都增加四个以上,然后利用这些已知点解求所有影像的外方位元素。
这中间包含一个已知点由少到多的过程,所以形象地称之为空三加密,空三加密是航空摄影测量的第一步,它决定数字测图的精度和质量,所以减少空三加密的误差是保证后续工作的基础。
三、光束法平差的基本原理平差的基本原理是以一张相片组成的一束光束作为一个平差单元,以中心投影的共线方程作为平差基础方程,通过各光线束在空间的旋转和平移,使模型之间的公共光线实现最佳交汇,使整体区域最佳的纳入到控制点坐标系中,从而确定加密点的地面坐标和影像的外方位元素。
无人机解决方案操作手册

无人机数据处理完整解决方案操作手册目录1产品特点 (1)1。
1无人驾驶小飞机项目情况简介 (2)1.2数据处理软件技术指标 (3)1.3硬件设备要求 (3)1。
4处理软件要求 (3)1。
5数据要求 (3)2数据处理操作流程 (4)2.1数据处理流程图 (4)2。
2空三加密 (4)2。
2.1启用软件FlightMatrix (4)2。
2.1。
1创建Flightmatrix工程42.2。
1。
2设置工程选项参数42。
2.1.3自动化处理 (7)2.2。
1.4DA TMatrix交互编辑 (8)2。
2.1.5调用PA TB进行平差解算 (9)2。
3生成DEM、DOM (10)2.4镶嵌成图 (10)2。
4。
1启用软件EPT (10)2。
4。
1.1导入MapMatrix工程生成DOM镶嵌工程122。
4。
1。
2编辑镶嵌线152.5图幅修补 (16)2。
6创建DLG,进行数字测图 (17)1产品特点1)空三加密1.可根据已有航飞POS信息自动建立航线、划分航带,也可手动划分航带。
2.完全摒弃传统航测提点和转点流程,可不依赖POS信息实现全自动快速提点和转点,匹配同影像旋偏角无关,克服了小数码影像排列不规则、俯仰角、旋偏角等特别大的缺点.即使是超过80%区域为水面覆盖,程序依旧能匹配出高重叠度的同名像点,整个测区连接强度高。
3.直接支持数码相机输出的JPG格式或TIF格式,无需格式转换。
4.无需影像预旋转,横排、纵排都可实现自动转点,节约数据准备时间.5.实现畸变改正参数化,方便用户修正畸变改正参数,不需要事先对影像做去畸变即可完成后续4D产品生产。
6.除无人机小数码影像外,还适用于其它航空影像。
7.空三加密支持无外业像控点模式,方便快速制作挂图,满足相关需求。
8.专门针对中国测绘科学研究院二维检校场和武汉大学遥感学院近景实验室三维检校场检校报告格式研发了傻瓜式批处理影像畸变差改正工具,格式对应,检校参数直接填入,无需转换,方便空三成果导入到其他航测软件进行后续处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
像片量测工具左侧属性依次为:
1,点属性 点列表:上册菜单栏从左到右依次为:点号;删除点;点滤除;点滤除工具;查找 点;列属性。 点详细信息: 概况:添加新点 点号 点类型 状态 描述 位置:坐标 坐标残差 坐标标准差 点所在影像:像片 Id;点在像片中的坐标;坐标误差。
INPHO MATCH-AT 空三加密模块操作手册
北京超图软件股份有限公司 2012 年 2 月
目录
1.1. 启动“ApplicationsMaster”............................................................................................. 2 1.2. 打开项目........................................................................................................................ 2 1.3. 新建项目/项目生成器 .................................................................................................. 2 1.4. 影像金字塔.............................................................................................................. 13 1.5. 控制点量测.............................................................................................................. 14 1.6. 空中三角测量.......................................................................................................... 20 1.7. photo measure tool中查看空三结果 ........................................................................... 32 1.8.后处理(最终空中三角测量) ..................................................................................... 36 1.9.抽稀点 ............................................................................................................................. 36
1.3. 新建项目/项目生成器 当点击新建按钮时,项目编辑器会自动的启动基本对话框。
1.3.1.
从上往下逐个打开对话框,输入项目所需数据。 在视图列表双击任意的图标都会弹出编辑对话框或者从编辑菜单选择进行编辑。 最后,以任意名称保存项目,例如,<project_prepared.prj>。 基本对话框 输入 log 文件的名称: 分别确认像物方坐标 m,图像坐标 mm,角度 grad 等单位。 激活校正地球曲率、折射复选框。 在描述文本域输入一串字符。 操作者文本框默认为计算机名。
1.3.6.子区定义 子区的定义主要应用于特定目的或者因磁盘空间限制或其他操作原因将 整个测区划分开。当利用子区时要确信让子区之间有重合以确保后面它们 之间的自动连接。 打开“测区”对话框点击添加按钮添加一个新的子区或者点击编辑按钮编 辑已定义的子区。 输入子区标识符。 从项目中的像片列表选择要分为一个子区的所有影响点击 将目标像片 导入到子区中的像片列表。另外可点击左下角的图形定义,可通过矩形选 择或者多边形选择定义。
像片定义 在项目编辑器打开像片定义对话框,因为 Match-AT 只支持框幅式相机,因此双击框 幅式图标。
利用导入功能加载在同一目录下的像片。添加功能只用来手工加载一个像 片。 通过点击像片导入向导中的添加按钮加载 Tiff 像片。
现在为像片选择相机并输入地形高(650m)。 这个利用已存在的 GNSS/IMU 初始化定向复选框可以不选择,因为 GNSS 还 没有加载。
点击 OK,选择 YES 改变外方位元素值。 1.3.5.控制点
在项目编辑器选择控制点打开控制点编辑器。
控制点的导入和 GPS 的导入情况类似。 对于标准差的设定,在软件中的第一次设置推荐默认计算 。 对于像点坐标:
输入数据: 像元大小:9mm 像点坐标 标准差=像元尺寸/n=0.0018mm 这里的 n 在手工量测时设置为 3,自动量测时设置为 5。 地面控制点 平面控制精度:
打开图像后查看图像的排列是否正确,如果排列顺序倒转则在航带定义的下 图点左下角顺序倒置:
或者尝试在相机定义中的下图修改来使得像片排列正确:
控制点的手工量测: 由于导入控制点需要调整位置,在 PMT 工具左侧点击 points,选择一个点双 击会弹出右侧的 MultiAerial,点击 pan 右侧的下拉菜单选择 measure,进入 量测功能:
输入数据:
焦距长度:101.4mm
图像宽度:230mm=像元大小*像片宽度(像素个数)
航向重叠:60%
基高比:1:1.02
像片比例尺:1:10228
像元大小:9μm
地面控制点: X,Y 标准差=像元大小/n*像片比例尺分母=0.0184 公式中的个 n 为 1-5 之间的一个数,一般手工量测设置为 3,自动量测设置为 5。
坐标系统不是必须定义的选项,因为这只是个小项目,所以选择 local
点击 OK 确认。 1.3.2. 相机编辑器
双击相机图标启动“相机编辑器”,这里可以新建相机或者导入一个从其他项目建好 的已存在相机或者从老的 inpho 相机文件。这里推荐保存所有的相机参数为一个通 用的 inpho 项目文件,这个文件可以像数据库一样在 Inpho 软件提供服务。 1.3.2.1. 导入已存在的相机定义 从相机编辑器主窗口选择导入 在向导的下一页,选择导入格式,,选择 Inpho 相机文件(4.0 或者更早的版本)还 是 Inpho 项目文件(5.0)。 选择<sample_came ras.prj>,然后导入。 下一页选择导入的相机,为了避免和已定义相机 ID 冲突,选择冲突图标。 点击完成导入相机定义。这里注意,如果你导入的是一个老的 inpho 相机文件(4.0 或者更早),或许你需要编辑一下导入的相机,因为相机的旋转角度和 GNSS 天线偏 心率还是未知。
1.3.2.2. 添加一个新的相机定义 通过点击添加按钮来新建一个新的相机。输入新的相机名称。
点击编辑启动编辑对话框。 像例子测区中的 UltraCamD 相机一样,设置默认的相机校正 在基本列表框,需要定义 GNSS 天线偏移,设置:X=0.0m,Y=0.0m,Z=1.58m。
相机的旋转角度为图像坐标的 x 轴方向和飞机飞行方向间的夹角。Zeiss 相机通常是 x 轴和飞行方向一样,而徕卡相机需要旋转 180 度。例子中,OFFINGEN 相机输入 0 度。 在校正选项卡,定义主点位置(PPA 和 PPS x=y=0mm)和焦距(f=101.4mm)。
下一步,定义分隔符类型,一般为空格,逗号等。 这一步用来定义列,选择每个列头选择一列然后点上面的 ID 等设置数据 类型。
下一步,设置 GNSS 的识别符提取。 下一步,确认坐标系统和单位,如果这里的坐标类型和项目单位与创建的 项目不同,会做自动的转换。
下一步进入航带生成和外方位元素初始化界面,可以通过加载的 GNSS/IMU 进行航带的自动生成和外方位元素初始化。
最后根据实际情况设置标准差(第一次定义可点 default):
1.3.4.航带定义 如果在上一步导入 GNSS/IMU 时没有生成航带,这里可以手工定义或者利 用“航带定义”功能自动生成。编辑和手工生成工作如下所述: 自动生成航带利用生成按钮,利用像片 ID 和 Kappa 角的改变,自动生成 各航带。在下图点击 Genertor(生成):
如果没有创建金字塔,选择所有像片点击 Process Overview 进入计算金字塔 界面:
生成金字塔 颜色位深(默认即可) 对图像做直方图调整 支持扫描数据 将金字塔文件保存成单独文件 JPEG 压缩 删除金字塔 点击 start 开始计算金字塔。
1.5. 控制点量测
当项目定义完成后,项目编辑器的界面如下图,如果哪个地方定义有偏差,可双 击进行编辑:
1.4. 影像金字塔 给项目中的每个像片创建影像金字塔。影像金字塔主要在像片放大和尤其
是在空三加密中的迭代过程中应用(无影像金字塔会提示错误)。影像金字 塔可以单独保存一个文件,这样,原始影像保留原来的样子不被改变,由于 这个文件大小要小于内部金字塔的类型,所以更容易备份。如果要生成外部 金字塔,要确保原始图像格式为瓦片 tif 格式。不过,据实际操作,内部金 字塔模式处理速度要高于外部金字塔模式。 点击主窗口 Basics->image commander,其中的 overview 即为金字塔等级, 这个等级个数由软件自动计算,如果没有创建金字塔则显示为 0.
2,Tie Area(连接点区域) 3,航带
4,像片属性 像片列表 像片详细信息:
概况:像片名 相机参数 地形高度
位置:旋转 IMU 精度 标准差
像片中的 TP 点:在该像片中各 TP 点的相关信息
开始打开像片量测工具时如下图所示:
点击右侧 photos 中任一图像 ctrl+A 全选如下图所示即会显示图像: