基于气动柔性驱动器的球果采摘末端抓持器
北京航空航天大学科技成果——气动软体抓持装置
北京航空航天大学科技成果——气动软体抓持装置成果简介柔性是生物体本质而普适的重要属性。
绝大部分生物都具有柔软的组织,这些生物依靠自身柔性,能够高效、和谐地与自然界交互。
“软体”的机器人也能像生物体一样,主动或被动地改变自身形状、刚度和运动,从而更加安全高效地与环境交互。
传统柔性铰链原理的机器人是依靠多个微小刚性单元的连接以及弹簧等刚性元件的使用来达到“柔性”的目的,但控制方式与传统刚性机器人没有本质的区别,故这类机器人虽然在一定程度上解决一些刚性机器人存在的问题,依旧有其局限性,依然应该划分于“刚性”机器人的范畴。
本项目研发了一种基于软体材料和气动控制的气动软体抓持装置,以代替传统机械手执行末端进行高效而安全的作业。
本项目手指设计为叠层排布的褶皱式柔性结构体,通过向手指内部的通道进行充气或吸气,从而实现手指向外弯曲或者向内弯曲的姿态变形,抓起和释放球状、片状、立方体状、锥刺表面以及各种复杂外形的实体,并且可以抓起于自身重量3倍的物体的物品。
与刚性机器手相比,本项目没有类似刚性机器手的连杆、铰链和电机等结构上的限制,没有复杂的控制系统,在抓持易碎、形状复杂的工件时具有不可替代的优势。
在未来的空间站小型机械臂作业,工业生产线以及医疗康复等领域具有潜在的应用前景。
技术描述及优势本项目突破了常规机构和控制方法的限制,采用了软体材料(杨氏模量小于1MPa),通过气动控制方式来控制软体手指的运动,实现了制造工艺和驱动方式的创新。
气动软体机械手采用软体材料浇铸而成,整体呈现出足够的柔性;其外形、气腔经过合理的设计,具备很好的性能,在与人和工件的交互中有很好的实用性和安全性。
气动软体抓持装置的控制采用气动方式,通过单片机来控制阀的状态,使气腔能够自如地充气和放气,实现气动软体机械手的不同姿态运动。
本项目研发的手指,通过气动控制方式来实现向内弯曲运动或者向外弯曲运动。
向内弯曲时,通过调节向气动软体机械手中充气的气压来调节手指的弯曲程度,来达到抓取不同重量物体的目的;向外弯曲时,通过对气动软体机械手抽真空来实现,这是传统机械手乃至人体手指不能完成的动作,这个特殊的运动方式能够使得气动软体抓持装置能够抓取的物体的体积范围大大增加,大大的提高了其在生产生活中的适应性。
一种球形果蔬柔性采摘末端执行器[实用新型专利]
![一种球形果蔬柔性采摘末端执行器[实用新型专利]](https://img.taocdn.com/s3/m/25f9247051e79b896902267d.png)
专利名称:一种球形果蔬柔性采摘末端执行器专利类型:实用新型专利
发明人:叶伟然
申请号:CN201820679293.4
申请日:20180508
公开号:CN208175401U
公开日:
20181204
专利内容由知识产权出版社提供
摘要:本实用新型提供了一种球形果蔬柔性采摘末端执行器,包括控制台、机械臂机构和柔性采摘末端执行机构,所述控制台内设有控制模块、图像处理模块和蓄电模块,所述控制台的上表面设有所述机械臂机构,所述机械臂机构包括第一连接块,所述第一连接块固定于所述控制台的上表面,本实用新型通过第一半球形夹具和第二半球形夹具将待采摘果蔬进行包裹,液压缸驱动剪叉伸缩杆端部的剪刀对果梗进行剪切,实现了待采摘果蔬与植株的分离,第一半球形夹具和第二半球形夹具的内侧表面均覆盖软硅胶垫,很好的避免了对果蔬表皮的破坏,保证了果蔬的品质,可非常顺利的对番茄、苹果、柑橘等球形果蔬进行柔性采摘,具有很好的通用性,开放性强,易于扩展。
申请人:湖州佳创自动化科技有限公司
地址:313000 浙江省湖州市吴兴区蜀山路3558号1号楼510-511室
国籍:CN
代理机构:北京众合诚成知识产权代理有限公司
代理人:郭晓凤
更多信息请下载全文后查看。
(2021年整理)猕猴桃果实采摘末端执行器设计与试验
猕猴桃果实采摘末端执行器设计与试验编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(猕猴桃果实采摘末端执行器设计与试验)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为猕猴桃果实采摘末端执行器设计与试验的全部内容。
猕猴桃果实采摘末端执行器设计与试验*【摘要】果实无损采摘是采摘机器人的关键技术之一,本文进行了自然生长条件下簇生猕猴桃果实无损采摘末端执行器的研究。
基于人工采摘方式和果柄生物特性,提出面向机器人的果实采摘方法,设计了果柄分离试验进行可行性验证;基于果实采摘方法设计了从底部接近、旋转包络分离毗邻果实并抓取的末端执行器,并试制样机,进行了现场评价试验。
试验结果表明,末端执行器有效解决了毗邻果实分离问题,能够实现单个果实稳定抓取和无损采摘,采摘成功率在96.0%以上,平均单果耗时22s。
关键词:猕猴桃果实采摘机器人采摘方法末端执行器中图分类号:S225.93文献标识码:A文章编号:××(编辑部制作)Study on Picking End—effector of KiwifruitAbstractFruit nondestructive picking is one of the key technologies of harvesting robot. In this paper, a nondestructive picking end—effector of kiwifruit was studied。
Firstly, based on the artificial way of kiwifruit picking and the biology characteristics of kiwifruit stalk, a fruit picking method for robot was proposed, which was verified by a special designed separation test. Then, an end-effector was designed and manufactured based on the fruit picking method, which could approach a fruit from the bottom, envelop and grab the fruit from two sides。
一种果蔬采摘柔性末端夹持器的设计与制作

河南农业2021年第7期方向的壁厚稍小,其目的是使夹持器充气膨胀以后主要沿长度方向膨胀,在底层的应变抑制层的作用下实现最大程度的弯曲效果,防止其他方向的膨胀,提高工作效率。
二、果蔬采摘柔性末端夹持器的制备本设计的材料采用Ecoflex-0050硅橡胶浇注而成,此类硅胶应变性能好,具有很好的弹性以及伸长率。
模具采用SolidWorks 三维设计软件进行建模,导入3D 打印软件中进行切片处理,采用3D 打印机打印出充气应变腔室部分的上下模如图2。
分型面的选择要便于脱模和模具的制造,下模结构尺寸与夹持器的内部轮廓将装配完成的软体机械手与气压传动回路连接,工作时由气泵输出压缩空气,通过调节调压阀以调节气压至适当范围,通过二位三通电磁换向阀控制气动回路的通断。
当电磁阀打开时,换向阀位于接通位置,当电磁阀关闭时,换向阀处于断开位置。
换向阀后的普通压力表测定通入的气压,当普通压力表读数小于精密压力表的量程时,才能保证精密压力表的安全使用,此时可打开阀门,通入气压进行抓取,精密压力表所测得的读数即为摘取果实时的工作压力。
四、总结该设计在模仿人手结构和特点的基础上,以目前仿生机械手的研究进展为依托,结合三维建模软件、3D 打印技术和气压传动知识,设计出针对果蔬采摘的末端夹持器。
随着各种超弹性材料的发展、先进的有限元分析及设计仿真软件的应用以及农业生产现代化的推进,农业软体机器人的设计研发更加方便,这将会是软体机器人在农业生产方面迅速发展的一个契机。
〔基金项目:河南省科技攻关项目(182102110356),2020年度河南省新工科研究与实践项目(2020JGLX014),河南省教育科学“十三五”规划2020年度一般课题(2020YB045)〕一种果蔬采摘柔性末端夹持器的设计与制作图2 模具设计图图3 气压传动回路图NONG YE JI XIE农业机械。
黄瓜抓持特性与末端采摘执行器
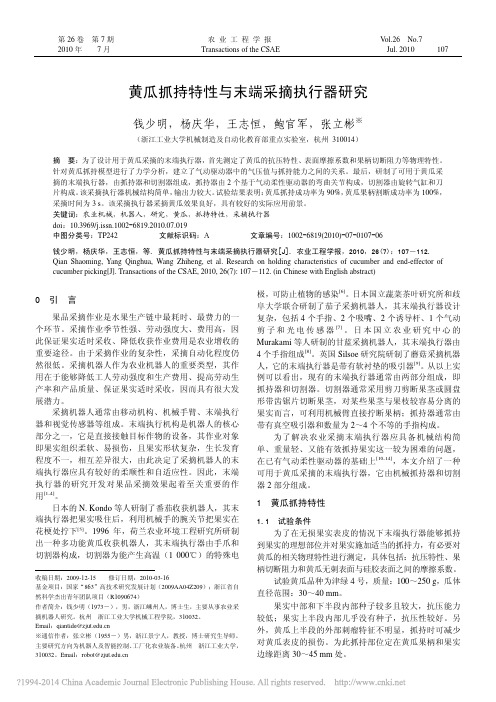
第26卷第7期农业工程学报V ol.26 No.72010年7月Transactions of the CSAE Jul. 2010 107 黄瓜抓持特性与末端采摘执行器研究钱少明,杨庆华,王志恒,鲍官军,张立彬※(浙江工业大学机械制造及自动化教育部重点实验室,杭州 310014)摘 要:为了设计用于黄瓜采摘的末端执行器,首先测定了黄瓜的抗压特性、表面摩擦系数和果柄切断阻力等物理特性。
针对黄瓜抓持模型进行了力学分析,建立了气动驱动器中的气压值与抓持能力之间的关系。
最后,研制了可用于黄瓜采摘的末端执行器,由抓持器和切割器组成,抓持器由2个基于气动柔性驱动器的弯曲关节构成,切割器由旋转气缸和刀片构成。
该采摘执行器机械结构简单,输出力较大。
试验结果表明:黄瓜抓持成功率为90%,黄瓜果柄割断成功率为100%,采摘时间为3 s。
该采摘执行器采摘黄瓜效果良好,具有较好的实际应用前景。
关键词:农业机械,机器人,研究,黄瓜,抓持特性,采摘执行器doi:10.3969/j.issn.1002-6819.2010.07.019中图分类号:TP242 文献标识码:A 文章编号:1002-6819(2010)-07-0107-06钱少明,杨庆华,王志恒,等. 黄瓜抓持特性与末端采摘执行器研究[J]. 农业工程学报,2010,26(7):107-112.Qian Shaoming, Yang Qinghua, Wang Zhiheng, et al. Research on holding characteristics of cucumber and end-effector of cucumber picking[J]. Transactions of the CSAE, 2010, 26(7): 107-112. (in Chinese with English abstract)0 引 言果品采摘作业是水果生产链中最耗时、最费力的一个环节。
气动柔性末端执行器设计及其抓持模型研究

气动柔性末端执行器设计及其抓持模型研究鲍官军;高峰;荀一;都明宇;杨庆华【期刊名称】《农业工程学报》【年(卷),期】2009(025)010【摘要】针对目前刚性结构的农业果实采摘机械手柔顺性不足而易损伤抓取目标的缺点,设计了一种柔性末端执行器结构.该末端执行器由3个气动柔性弯曲关节作为手指部分、1个气动柔性扭转关节作为腕部,给出了手指部分和腕部的数学模型.分析了该末端执行器抓取圆柱形目标时的夹持模式和抓取球形目标时的抓握模式.仿真分析并试验研究了抓取目标物体重力和半径变化对末端执行器内腔压力的影响.结果表明建立的抓持模型能够反映该末端执行器的基本特性,研制的柔性末端执行器能够应用于农业果实的采摘作业.%Taking into account the disadvantages of rigid grasping end-effectors for agricultural fruits, such as low complaisance and easy to hurt the grasping object, authors designed a type of flexible end-effector, which took three pneumatic flexible bending joints as its fingers and one flexible pneumatic torsion joint as its wrist. The mathematical models for fingers and wrist of the end-effector were presented. According to the shapes of grasping objects, the end-effector's gripping model for grasping columniform objects and holding model for grasping spheroidal objects were analyzed in detail. Simulation and experiments were conducted to study the impact of weight and radius of the grasping object to the air pressure inside the end-effector. The results showed that the mathematical models can represent the essentialcharacteristics of the end-effector. The flexible end-effector can be applied in agricultural fruits picking task.【总页数】6页(P121-126)【作者】鲍官军;高峰;荀一;都明宇;杨庆华【作者单位】浙江工业大学机械制造及自动化教育部重点实验室,杭州,310032;浙江工业大学机械制造及自动化教育部重点实验室,杭州,310032;浙江工业大学机械制造及自动化教育部重点实验室,杭州,310032;浙江工业大学机械制造及自动化教育部重点实验室,杭州,310032;浙江工业大学机械制造及自动化教育部重点实验室,杭州,310032【正文语种】中文【中图分类】TP241【相关文献】1.苹果采摘机器人末端执行器抓持规划研究 [J], 罗大伟;姬伟;李俊乐;赵德安2.黄瓜抓持特性与末端采摘执行器研究 [J], 钱少明;杨庆华;王志恒;鲍官军;张立彬3.3自由度气动柔性手指包络抓持力模型研究 [J], 钱少明;都明宇;杨庆华4.基于气动柔性驱动器的球果采摘末端抓持器 [J], 鲍官军;张水波;陈亮;杨庆华5.基于气动式机械末端执行器主动柔性接触研究 [J], 邵曙;吕志翼因版权原因,仅展示原文概要,查看原文内容请购买。
一种抓切一体式的球形果蔬采摘机器人末端执行器[发明专利]
专利名称:一种抓切一体式的球形果蔬采摘机器人末端执行器专利类型:发明专利
发明人:权龙哲,李成林,吴奇,王建森,陈鑫,冯正阳,陈词,肖术明
申请号:CN201710102179.5
申请日:20170224
公开号:CN107041210A
公开日:
20170815
专利内容由知识产权出版社提供
摘要:本发明公开了一种抓切一体式的球形果蔬采摘机器人末端执行器,包括上连接板(20)、下连接板(18)、切割盘刀(23)、4个柔性包络单爪、柔性包络爪旋转机构。
切割转向伺服电动机(12)通过螺栓固定于上连接板(20)上,在其输出轴上装配伸出板(21),基座(16)和固定架(13)由螺栓联接固定,可轴向转动,软轴(17)穿过基座(16)的限位孔,两端分别通过凸缘联轴器(15)连接于两驱动伺服电动机(14)输出轴,软轴(17)驱动的4个柔性包络单爪可实现柔性自适应果蔬生长位姿抓取。
本发明以三臂棚室采摘机器人为载体,实现对不同生长位姿球形果蔬柔顺、高效率抓割,可应用于球类果蔬自动化收获中。
申请人:东北农业大学
地址:150030 黑龙江省哈尔滨市香坊区木材街59号
国籍:CN
更多信息请下载全文后查看。
采摘机器人柔性末端执行器抓取策略研究
采摘机器人柔性末端执行器抓取策略研究丁媛媛;金寅德【摘要】为实现采摘机器人末端执行器的灵巧操作和精确力控制,提高机器人通用性,提出一种具有一定柔性与刚性的气动末端执行器,通过对三个弯曲关节的合理配置实现不同基本特性和不同力学特性果蔬的有效抓取。
应用系统动力学理论建立关节与末端执行器数学模型,分析关节弯曲量、关节输出力及执行器输出力与关节气压之间的控制关系,搭建实验平台,验证理论分析的准确性。
实验结果表明:理论分析与实验结果一致,可实现末端执行器输出力的精确控制。
【期刊名称】《制造业自动化》【年(卷),期】2013(000)024【总页数】4页(P19-22)【关键词】弯曲关节;末端执行器;采摘机器人【作者】丁媛媛;金寅德【作者单位】杭州职业技术学院,杭州 310018;浙江省特种设备检验研究院,杭州 310000【正文语种】中文【中图分类】TP2420 引言果蔬采摘是水果生产链中最耗时和最费力的一个环节,研究和开发果蔬采摘机器人技术对于解放劳动力、提高劳动生产效率、降低生产成本及保证新鲜果蔬品质具有重要的意义。
由于果蔬的外表皮脆弱、形状及生长状况复杂,因此末端执行器的设计通常被认为是农业机器人的核心技术之一[1]。
自1983年以来,采摘机器人末端执行器前沿技术和应用技术的研究和开发已经取得很多重要成果[2],法国、荷兰和日本等国家相继立项研究了采摘果蔬、柑橘、番茄、黄瓜、西瓜和葡萄等智能机器人,其末端执行器以吸盘式和多指式为主[3],我国对农业机器人领域的研究始于20世纪90年代中期,上海交通大学机器人研究所曹其新、刘成良等人完成了智能化联合收割机样机的研制;江南大学机械工程学院章军等提出了基于弹性波壳伸缩的气动驱动器。
尽管我国在果蔬采摘机人末端执行器的理论和实践研究都取得了显著进步,但大多数的执行器系统复杂,成本高,通用性差,仍停留在实验室阶段,更难以运用到农业工程实践之中[4]。
同时,由于多指式气动末端执行器的果实采摘可以归结为末端执行器手指对具有不同几何形状和外表特性的物体抓取问题,不同的果蔬其外表特性各不同,对于橙、柚等外表皮较厚且富弹性的果蔬,夹持力稍大也不致压伤外表;对于番茄、草莓、茄子等外表皮较薄较脆的果蔬,对末端执行器抓持力的精确控制显得尤为重要[5]。
基于气动软体驱动器的草莓拾取机器人的设计与优化
基于气动软体驱动器的草莓拾取机器人的设计与优化摘要:随着科学的不断进步,软体机器人领域迅速发展,受到生物体在自然界中凭借本身柔软的结构高效的完成各种复杂运动,给软体机器人的设计带来了灵感。
本研究以草莓的安全采摘为设计目标,针对气压驱动的多腔式柔性驱动器展开研究。
以草莓曲线为基础提出了四叶片软体抓手,讨论了两种气体通道结构对软体抓手弯曲性能的差异。
实现对不规则草莓目标物的安全、稳定的抓握,成功抓取的概率达到 90%,对抓取物表面的破损率近似为 0%。
关键词软体驱动器; Abaqus 仿真; 弯曲特性草莓采摘; 无损抓取1 绪论1.1.研究的背景和意义机械手作为末端执行器,是机器人结构中最为重要的组成部分。
目前,机械手的技术仍不够成熟,在农业领域的应用中还存在巨大的挑战,本课题面向草莓的采摘作业设计研究软体机械手的关键技术,采用提供显著的运动效果和高的功率重量比的气压驱动,既能实现快速驱动,也具备良好的柔软性,简化了果蔬的采摘任务,极大提高了生产率。
研制出的样机能够实现对目标物的安全和灵活抓取,进一步促进了软体机械手在农业领域的应用,对与实现果蔬采摘自动化具有重要的研究意义。
1.1.气动软体机器人发展现状哈佛大学Whitesides团队设计制作了一款装有嵌入式气动网络,海星状三层结构的柔性爪,提出了一种软刻蚀技术可以快速生产软体驱动器,在抓取时将应力分布在接触区域,提高了抓取脆弱物体的能力,其最大抓取直径为10cm,负载不超过300g。
德国的Deimel等人为解决抓取过程中的复杂性,设计出一款高顺应性且灵巧的气动仿人软体机械手,可以在不改变生产过程的情况下完成快速生产。
国内对软体机器人的研究相对较晚,研发的机器人设备仍处于实验室阶段,以哈尔滨工业大学、北京航空航天大学为首的高校使用不同的驱动对软体驱动器进行研究,取得了阶段性的突破。
但是软机械手并不适合使用传统的电动机驱动,气动驱动在机器人技术和自动化领域中最为常用,可以提供显著的运动效果和高的功率质量比,但是比较难实现精确控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 2)
图1 Fig. 1
气动柔性驱动器
Flexible pneumatic actuator
式中
h— — —手指至底座距离
1. 端盖 2. 弹簧 3. 橡胶管 4. 紧固圈 5. 管接头
球果采摘末端执行器抓持机构主要由基于 FPA 的 3 个手指构成, 如图 2 所示。每个手指由 FPA、 转 轴、 上连杆、 下连杆、 上端盖、 下端盖组成。3 个相同 的手指通过下连杆呈 120 ° 均布安装在基座上, 手指 的弯曲平面均通过整个抓持器的中心轴 。在各手指 的内侧设置橡胶衬垫以保护目标果实 。FPA 配以刚 性连杆结构, 使得整个末端抓持器既保持了柔顺性 和安全性的优点, 同时增加了抓持的刚度, 能够保证 对目标果实的安全、 可靠抓持作业。 通过通气管同时向 3 个 FPA 内腔充入压缩气 则 FPA 伸长并驱动连杆机构上连杆同时向内侧 体, 运动, 实现夹持、 抓握等动作。
2013年5月 doi: 10. 6041 / j. issn. 10001298. 2013. 05. 042
农 业 机 械 学 报
第 44 卷 第 5 期
基于气动柔性驱动器的球果采摘末端抓持器
鲍官军 张水波 陈 亮 杨庆华
( 浙江工业大学特种装备制造与先进加工技术教育部 / 浙江省重点实验室,杭州 310032 )
Design of Spherห้องสมุดไป่ตู้cal Fruit Endgrasper Based on FPA
Bao Guanjun Zhang Shuibo Chen Liang Yang Qinghua
( Key Laboratory of Special Purpose Equipment and Advanced Processing Technology, Ministry of Education and Zhejiang Province,Zhejiang University of Technology,Hangzhou 310032 ,China)
( 3)
式中
Lr — — —手指内侧与基座中心线间距 — —x i z i y i 相对于 x0 z0 y0 的旋转角度 φi — 坐标系 x i z i y i 到 x0 z0 y0 的旋转矩阵 cosφ i - sinφ i 0 0 sinφ i cosφ i 0 iR = 0 0 1
末端抓持器抓握球果目标时, 球果与其底座接 3 个手指的指端与球果接触, 触, 任意手指 i 与球果 的几何关系如图 3b 所示。 则由几何分析可得抓握 半径为 R 的球果时, 手指的弯曲角度表达式为 θ = arctan
( ( RL + L
r
2 2 L2 - ( L r槡 P - R + L r - L P R) 2 2 2 2 L2 P槡 P - R + Lr ) ( LP + Lr ) 2
( 4)
图2 Fig. 2
7. 基座
末端抓持器结构 Structure of endgrasper
1. 上端盖 2. FPA 3. 下端盖 4. 转轴 5. 上连杆 6. 下连杆
则手指弯曲 θ 角度的情况下, 各手指指端在坐 标系 x0 z0 y0 中的位姿表达式为
0 i 0 p =0 i R p + pi =
)
( 6) N=
设有系数 μ1 , 使 N = μ 1 f N1 , 则式( 11 ) 可表示为 N 1 + sinθ) + cosθcosγ tanθ + [ G sinγ(3sin 3sinθ ] tanθ - μ θ( 1 + sinθ)
D 1
其中
L P = L b - ( R - h)
将式( 6 ) 代入式 ( 1 ) 可得抓握半径为 R 的球果 所需初始压力( 使得手指接触球果表面但不产生正 压力) p0 。 基座坐标系 x0 z0 y0 的 z0 轴与水平方向有任意倾 斜角度 γ 情况下的受力情况如图 4 所示, 假设其中 一个手指自身坐标系的 y i z i 平面与目标球果所受重 力 G 方向所在铅垂平面重合。 以目标球体中心 O G 点为力矩中心, 可得力矩平衡关系式 f D - ( f N - f N1 ) = 0 式中 fD — — —球果与基座之间的摩擦力 fN — — —手指 i 与球果之间的摩擦力 f N1 — — —另外两个手指与球果之间摩擦力在 y i z i 平面分力的合成 则有
0 0 0 r b + r h + L b sinθ 1 h + L b ( 1 + cosθ)
+
为零的情况下, 其内腔压力 p 与弯曲角度 θ 的关系为
( ) ( )
( L r + r h + r b ) sinφ i - ( L r + r h + r b ) cosφ i = 0 sinφ i ( L r - L b sinθ) - cosφ ( L - L sinθ) i r b h + L b ( 1 + cosθ) ( 5)
2
2. 1
数学模型
单个手指的数学模型 23] 根据文献[ 的理论分析, 单个手指在输出力矩 θ 2 E b t b L b θcot 2 + r h θ - 2 L b p= + p atm rh θ L b θcot + rh θ 2
cosφ i sinφ i 0
- sinφ i cosφ i 0
( cosθ + μ1 ) cosγ
第5 期
鲍官军 等: 基于气动柔性驱动器的球果采摘末端抓持器
243
1
结构原理
2. 2
tb — — —橡胶管壁厚 rh — — —橡胶管内侧与连杆的距离 Lb — — —橡胶管长度 指端的运动学方程 p atm — — —大气压力
气动柔性驱动器( FPA) 是本课题组提出的一种 22] 新型柔性驱动器, 如图 1 所示。 文献[ 详细阐述 了其结构原理, 分析了其工作特性。
( 1)
式中
Eb — — —橡胶管弹性模量
244
农
业
机
械
学
报
2013年
2. 3
球果抓持模型
式中
N— — —手指 i 与目标球果之间的正压力 ND — — —球果与基座之间的正压力 ( 9) 、 ( 10 ) , 联立式( 7 ) 、 得 N=G sinγ( 1 + sinθ) + cosθcosγ + 3sinθ( 1 + sinθ) f N1 ND + 3sinθ tanθ ( 11 )
[1]
。 故进行农业果实的自
动化采摘设备研制是非常有必要的 。 由于一般农 业果实较为脆弱或敏感 , 并且形状各异 、 生长环境 相对复杂 , 因此农业果实采摘末端抓持器 / 执行器 的设计通常被认为是农业机器人研制的核心技术 [2] 之一 。
0313 修回日期: 20120417 收稿日期: 2012* 国家自然科学基金资助项目( 51075363 ) 和浙江省自然科学基金杰出青年团队资助项目( R1090674 ) Email: gjbao@ zjut. edu. cn 作者简介: 鲍官军, 副教授, 主要从事机器人技术及控制、 光伏微网控制研究, Email: robot@ zjut. edu. cn 通讯作者: 杨庆华, 教授, 主要从事机器人技术及应用 、 精密锻压研究,
建立末端抓持器的空间坐标系, 如图 3 所示。 2, 3) 则在图 3b 中, 根据几何关系可得手指 i( i = 1 , 指端 C 相对于其坐标原点 O i 的位置表达式为
i 0 x i i p = y = r b + r h + L b sinθ i z h + L b ( 1 + cosθ)
图3 Fig. 3 末端抓持器坐标系统
( b) 手指坐标系
Reference frame of endgrasper
( a) 基座坐标系
由图 3a 可知, 任一手指 i 的坐标原点 O i 在基座 坐标系 x0 z0 y0 中的表达式为
0
( L r + r h + r b ) sinφ i p i = - ( L r + r h + r b ) cosφ i 0
*
摘要: 为实现球果的安全、 可靠采摘, 基于气动柔性驱动器( FPA) 设计了球果采摘末端执行器, 主要由 3 个 FPA 驱 动的手指和基座构成。建立了手指指端在基座坐标系内的运动学方程, 分析了末端抓持器在任意姿态下进行球果 抓握的力学过程, 建立了球果抓持数学模型 。实验结果表明, 所设计的球果采摘末端执行器可对成熟球果进行任 意姿态的抓握, 建立的数学模型可用于实际的采摘过程控制 。 关键词: 采摘机器人 中图分类号: TP241 末端执行器 气动柔性驱动器 1298 ( 2013 ) 05024205 文章编号: 1000文献标识码: A
[3 ~ 20 ]
引言
果实采摘 季 节 性 强 、 时 间 短、 劳 动 强 度 大、 费 , 、 用高 是水果生产整个周期中最耗时 最费力的一 个环节 。 目 前 果 实 采 摘 基 本 上 还 是 人 工 作 业 , 自 动化程度 低 、 时 效 性 差、 易 损 伤 果 实, 并且采摘费 用占成本的 33 % ~ 50 %
Abstract: With the aim to realize the safe and stable picking of spherical fruit,a type of picking endgrasper was designed based on the flexible penumatic actuator ( FPA ) . The endgrasper was mainly composed of a base and three fingers driven by FPAs. The kinematics of finger tips in the base coordinate was established. The force model of spherical fruit grasping under discretional orientation was analyzed and the grasping mathematic model was built. The experimental results showed that the designed spherical fruit endgrasper could pick and hold mature fruit under discretional orientation and the mathematic model could be adopted in fruitpicking practice control. Key words: Picking robot Endeffector Flexible pneumatic actuator 国内外的果蔬采摘末端执行器基本都是刚性的 机械手指结构, 为保护目标果实, 在刚性手指内侧设 。但即便如此, 由于抓持力检测及 , 控制上的困难 其使用过程中依然可能对果实造成 21]提 出 了 完 全 由 气 动 柔 性 驱 动 器 损伤。 文 献[ 置柔性衬垫 ( Flexible pneumatic actuator, FPA ) 作为手指设计的 虽然安全性和适应性好, 但 自适应柔性末端执行器, 是其刚度明显不足。 为此, 本文研究设计一种基于 柔性 FPA 但同时具有一定抓持刚度的球果采摘末 端抓持器, 详细描述该末端抓持器的机械机构 、 工作 原理, 建立抓持过程的数学模型, 并进行仿真分析和 实验。