GPS卫星的导航电文和卫星信号
GPS卫星的导航电文和卫星信号

1
40
§4.6 GPS接收机基本工作原理
三.几种常见的GPS接收机
Ashtech系列GPS接收机(阿斯泰克)
国家:美国 公司:麦哲伦公司
1
41
§4.6 GPS接收机基本工作原理
三.几种常见的GPS接收机
2. Trimble系列GPS接收机(天宝)
1
15
§4.3 C/A码与P码
二.C/A码
定义
C/A码用于分址、搜捕卫星信号和粗 测距,是具有一定抗干扰能力的明码,提 供给民用
2. 产生
1.
C/A码是由两个10级移位寄存器
相结合而产生的
1
16
§4.3 C/A码与P码
二.C/A码
3. 基本特性
是GPS卫星的民用伪噪声码 码长1023bit,很短,易于捕获(捕获码) 码元宽度977.517nsec 时间周期1ms,1sec对应长度293Km 不同的卫星具有不同的C/A码 是L1载波的调制信号 测距误差2.93~29.3m,精度较低(粗码)
1
8
§4.1 GPS卫星播发的信号
二.伪随机码
3. 伪随机码
产生原因:随机码序列没有周期性,无法 复制 定义:具有良好的自相关特性的有周期性 的序列称伪随机序列。由二进制码元组成 的伪随机序列称二进制伪随机码简称伪码 产生装置:“多级反馈移位寄存器” 分类:截短序列、复合序列等
1
9
§4.2 伪随机码扩频与相关接收
1
34
§4.6 GPS接收机基本工作原理
GPS接收机的分类
3. 接收机通道
定义:跟踪、处理、量测卫星信号的部件; (一个时刻一颗卫星一个频率)
卫星导航电文讲解
卫星导航电文讲解本文内容大纲如下:⚫GPS信号讲解⚫GPS的导航电文讲解⚫GLONASS信号⚫GLONASS信号构成⚫GLONASS导航电文⚫Galileo信号⚫Galileo 信号构成⚫Galileo导航电文⚫北斗⚫北斗信号构成⚫北斗导航电文⚫GPS信号讲解GPS 卫星传输的信号主要由三个部分组成:∙载波∙测距码(伪随机码)∙导航电文每颗卫星使用两种不同的测距码来对导航电文进行扩频:∙粗略码(C/A),也称为民码,免费提供给全球用户使用,∙精细码(P),也称为军码,主要用于政府和军事机构中的高精度应用。
∙C/A 码是长度为1,023 比特的伪随机码,传输速率为1.023 Mbps,即每毫秒重复一次。
GPS 系统采用码分多址技术,每颗卫星使用不同C/A 码,在同一频率上传输信号,接收机通过对C/A码的识别来确定信号来自哪颗卫星。
∙P 码是码长为6.1871 x 1012 比特的伪随机码,传输速率为10.23 Mbps,P 码的周期很长,每周重复一次。
自1994 年起,为了反电子欺骗,P 码被W码加密得到Y 码,通常称为P (Y) 码,仅限于军事应用。
导航电文,经测距码扩频后,调制到射频载波上。
L1 载波1575.42 MHz 频带上同时调制了C/A 和P (Y) 码信号。
L2 载波1227.6 MHz 频带上只调制了P (Y)码信号。
⚫GPS的导航电文讲解导航电文由一个含有37,500 比特的主帧组成,传输速率为50 bps,电文的传送时间为12.5 min。
主帧分成25 个页面或帧,每帧由5 个子帧构成,包括时间和钟差改正数、卫星健康状况、当前卫星的星历或精密的轨道信息、以及一部分历书(包含所有卫星粗略轨道信息)。
接收机接收每颗卫星的星历数据,来确定卫星的位置。
它还需要传输时间和钟差改正数来计算伪距,进而确定接收机的位置。
这些信息在前三个子帧中传输,接收机至少需要16 秒(在最坏情况下是30 秒) 来获取这些必要信息。
GPS复习题(文字)
一、名词解释1.导航电文答:GPS卫星的导航电文是用户用来定位和导航的数据基础。
它主要包括:卫星星历、时钟改正、电离层时延改正、工作状态信息以及C/A码转换到捕捉P码的信息。
2.伪距答:GPS定位采用的是被动式单程测距。
它的信号发射时刻是卫星钟确定的,收到时刻则是由接收机钟确定的,这就在测定的卫星至接收机的距离中,不可避免地包含着两台钟不同步的误差影响,所以称其为伪距。
3.静态定位如果在定位时,接收机的天线在跟踪GPS卫星过程中,位置处于固定不动的静止状态,这种定位方式称为静态定位。
4.GPS全球定位系统GPS全球定位系统是一个空基全天候导航系统,它由美国国防部开发,用以满足军方在地面或近地空间获取一个通用参照系中的位置,速度和时间信息的要求。
5.岁差在日月引力和其他天体引力对地球隆起部分的作用下,地球自转轴方向不再保持不变,这使春分点在黄道上产生缓慢的西移现象,这种现象在天文学中称为岁差。
6.星历误差答:实际上就是卫星位置的确定误差。
星历误差是一种起始数据误差,其大小主要取决于卫星跟踪站的数量及空间分布、观测值的数量及精度、轨道计算时所用的轨道模型及定轨软件的完善程度等。
7.SA技术答:其主要内容是:(1)在广播星历中有意地加入误差,使定位中的已知点(卫星)的位置精度大为降低;(2)有意地在卫星钟的钟频信号中加入误差,使钟的频率产生快慢变化,导致测距精度大为降低。
8.差分GPS答:利用相距不太远的两个GPS测站在同一时间分别进行单点定位时所受到的卫星星历误差、大气延迟误差和卫星钟差等误差源的空间相关性较好的原理,利用基准站上的观测结果求得上述误差的影响并通过数据链将误差改正数发送给流动站从而提高流动站定位精度。
9.相对定位答:将两台接收机分别安置在基线的两个端点,其位置静止不动,并同步观测相同的4颗以上GPS卫星,确定基线两个端点在协议地球坐标系中的相对位置,这种定位模式称为相对定位。
10.相对论效应答:GPS卫星在高20200km的轨道上运行,卫星钟受狭义相对论效应和广义相对论效应的影响,其频率与地面静止钟相比,将发生频率偏移,这是精密定位中必须顾及的一种误差影响因素。
GNSS-第4讲 卫星导航电文及卫星信号
0.6s
1字含30bit
3、卫星导航电文——GPS
基本内容
12345
1帧
第1子帧
遥测字 交接字 表示码,时延改正,GPS周,数据龄期,星钟改正
第2子帧
遥测字 交接字
星历
第3子帧
遥测字 交接字
星历
第4子帧
遥测字 交接字 (多帧) 信息(每25帧中,每1帧的内容都不同)
第5子帧
遥测字 交接字 (多帧 )历书、健康状况等(每1帧的内容都不同)
第 4 章 卫星导航电文及卫星信号
GPS导航电文 GPS卫星信号 北斗导航电文 北斗卫星信号
1、GPS导航电文
作用:向用户提供卫星轨道参数、卫星钟参数 、卫星状态信息及电离层改正等信息
组成结构
30s
1帧含5个子帧
123
45
1子帧含10个字
6s
1 2 3 4 5 6 7 8 9 10
子帧4、5含25页
导航信息。MEO/IGSO的B1I播发 ✓ D2: 速率500bps,包含基本导航信息和增强服务信
息(系统完好性、差分信息、格网点电离层信息 )。GEO的B1I播发
4、卫星信号的调制
第一步:首先将导航电文调制在测距码上 第二步:然后将组合码调制到载波上
导航电文调制到测距码上
第二步:将组合码调制到载波上
载波调制的一般方法: 如果调制前载波为 Acos(t 0 )
➢ 调幅:振幅 A 随调制信号的变化而变化 ➢ 调频:载波频率f 随调制信号的变化而变化
➢ 调相:相位 (t 随0 )调制信号的变化而变化
调幅 AM (Amplitude Modulation) 调频 FM (Frequency Modulation)
第四章 GPS卫星导航电文和卫星信号
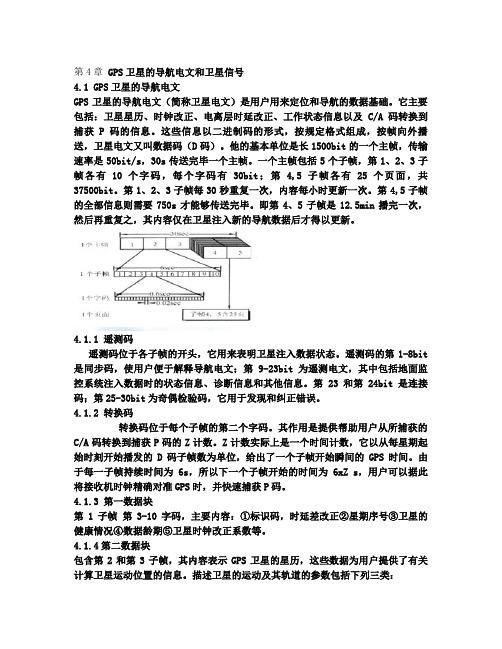
第4章GPS卫星的导航电文和卫星信号4.1 GPS卫星的导航电文GPS卫星的导航电文(简称卫星电文)是用户用来定位和导航的数据基础。
它主要包括:卫星星历、时钟改正、电离层时延改正、工作状态信息以及C/A码转换到捕获P码的信息。
这些信息以二进制码的形式,按规定格式组成,按帧向外播送,卫星电文又叫数据码(D码)。
他的基本单位是长1500bit的一个主帧,传输速率是50bit/s,30s传送完毕一个主帧。
一个主帧包括5个子帧,第1、2、3子帧各有10个字码,每个字码有30bit;第4,5子帧各有25个页面,共37500bit。
第1、2、3子帧每30秒重复一次,内容每小时更新一次。
第4,5子帧的全部信息则需要750s才能够传送完毕。
即第4、5子帧是12.5min播完一次,然后再重复之,其内容仅在卫星注入新的导航数据后才得以更新。
4.1.1 遥测码遥测码位于各子帧的开头,它用来表明卫星注入数据状态。
遥测码的第1-8bit 是同步码,使用户便于解释导航电文;第9-23bit为遥测电文,其中包括地面监控系统注入数据时的状态信息、诊断信息和其他信息。
第23和第24bit是连接码;第25-30bit为奇偶检验码,它用于发现和纠正错误。
4.1.2 转换码转换码位于每个子帧的第二个字码。
其作用是提供帮助用户从所捕获的C/A码转换到捕获P码的Z计数。
Z计数实际上是一个时间计数,它以从每星期起始时刻开始播发的D码子帧数为单位,给出了一个子帧开始瞬间的GPS时间。
由于每一子帧持续时间为6s,所以下一个子帧开始的时间为6xZ s,用户可以据此将接收机时钟精确对准GPS时,并快速捕获P码。
4.1.3 第一数据块第1子帧第3-10字码,主要内容:①标识码,时延差改正②星期序号③卫星的健康情况④数据龄期⑤卫星时钟改正系数等。
4.1.4第二数据块包含第2和第3子帧,其内容表示GPS卫星的星历,这些数据为用户提供了有关计算卫星运动位置的信息。
二、GPS系统的组成及信号结构
地面监控部分 通信和辅助系统 通信和辅助系统是指地面监控系统中负责数据传输以及提 供其他辅助服务的机构和设施,全球定位系统的通信系统 供其他辅助服务的机构和设施, 由地面通信线,海底电缆及卫星通信等联合组成,此外, 由地面通信线,海底电缆及卫星通信等联合组成,此外, 美国国防制图局将提供有关极移和地球自转的数据以及各 监测站的精确地心坐标, 监测站的精确地心坐标,美国海军天文台将提供精确的时 间信息。 间信息。
2、GPS卫星的信号结构 GPS卫星的信号结构 测距码 测距码是用于测定从卫星至接收机间的距离的二进制码,GPS 测距码是用于测定从卫星至接收机间的距离的二进制码,GPS 卫星中所用的测距码从性质上讲属于伪随机噪声码(PRN) 卫星中所用的测距码从性质上讲属于伪随机噪声码(PRN) 粗码( C/A码 A 、粗码( C/A码)
用户部分 接收机、 组成:GPS接收机 气象仪器、计算机、 组成:GPS接收机、气象仪器、计算机、钢尺等仪器 设成。 设成。
接收机按用途分导航型、测量型、授时型。 接收机按用途分导航型、测量型、授时型。 按接收的卫星信号频率分单频型、双频型。 按接收的卫星信号频率分单频型、双频型。 按接收的卫星类型分单星、 按接收的卫星类型分单星、多星
用户部分
GPS接收机:天线单元,信号处理部分, GPS接收机:天线单元,信号处理部分,记录装置和电源 接收机 天线单元:由天线和前置放大器组成,灵敏度高, 天线单元:由天线和前置放大器组成,灵敏度高,抗干扰 性强。GPS天线分为单极天线 微带天线、锥型天线等。 天线分为单极天线、 性强。GPS天线分为单极天线、微带天线、锥型天线等。 信号处理部分: GPS接收机的核心部分, 信号处理部分:是GPS接收机的核心部分,进行滤波和信号 接收机的核心部分 处理,由跟踪环路重建载波,解码得到导航电文, 处理,由跟踪环路重建载波,解码得到导航电文,获得伪 距定位结果。 距定位结果。 记录装置 : 主要有接收机的内存硬盘或记录卡(CF卡)。 主要有接收机的内存硬盘或记录卡(CF卡 电源: 分为外接和内接电池(12V), ),机内还有一锂电池 电源: 分为外接和内接电池(12V),机内还有一锂电池
4第四章GPS卫星信号与导航电文
GNSS
P码-精码
• P码的产生原理与C/A码相似,但更复杂。发生电路采用的 是两组各由12级反馈移位寄存器构成。码长Nu≈2.35×1014比 特,码元宽为tu=1/f0=0.097752μs,相应的距离为29.3m。 周期为Tu= Nutu≈ 267d,数码率为10.23Mbit/s。
• P码的周期长,267天重复一次,实际应用时P码的周期被分 成38部分(每一部分为7天,码长约6.19 ×1012比特),其中 1部分闲置,5部分给地面监控站使用,32部分分配给不同卫 星,每颗卫星使用P码的不同部分,都具有相同的码长和周 期,但结构不同。
• P码的捕获一般是先捕获C/A码,再根据导航电文信息,捕 获P码。由于P码的码元宽度为C/A码的1/10,若取码元对齐 精度仍为码元宽度的1/10~1/100,则相应的距离误差为 2.93~ 0.29m,故P码称为精码(precision code)。
GNSS
GPS信号(示意)
测距码t
t + △t 数据码D(t)
载波L
GNSS
频率
GPS卫星时钟频率选用10.23MHz,利用频率综合器产生所需要
的频率。GPS信号的产生如下图:
基本频率ƒ0
10.23MHz
÷10
×154
L1
C/A码 P码
1575.42MHz 1.023MHz 10.23MHz
×120
模二加反馈 (e+f)
0 0 0 1 0 0 1 1 0 1 0 1 1 1 1
末级输出的二进制数
1 1 1 1 0 0 0 1 0 0 1 1 0 1 0
GPS(卫星信号)

GPS卫星信号是GPS卫星向广大用户发送的用 GPS卫星信号是GPS卫星向广大用户发送的用 卫星信号是GPS 于导航定位的调制波,它包含有: 于导航定位的调制波,它包含有: (1)测距码 数据码(导航电文) (2)数据码(导航电文) (3)载波 卫星时钟基本频率f 10.23MHz, 卫星时钟基本频率f0为10.23MHz,是产生上 述三种信号的基础。 述三种信号的基础。
—时间二参数 • 从星期日子夜零点开始度量的星历参 考时刻toe; • 星历表的数据龄期AODE toe −t1 星历表的数据龄期AODE = 为作预报星历测量的最后观测时间, 式中t1为作预报星历测量的最后观测时间, 因此AODE AODE就是预报星历的外推时间长 因此AODE就是预报星历的外推时间长 苏州科技学院空间信息与测绘工程系 度。
式中t1为最近一次更新卫星钟改正参数的时间。 式中t 为最近一次更新卫星钟改正参数的时间。 AODC是时钟改正数的外推时间间隔,由于基准时 AODC是时钟改正数的外推时间间隔, 是时钟改正数的外推时间间隔 间给出的卫星钟改正参数精度随时间的推移而下降, 间给出的卫星钟改正参数精度随时间的推移而下降, 因此该参数指明了卫星时钟改正数的置信度, 因此该参数指明了卫星时钟改正数的置信度,
苏州科技学院空间信息与测绘工程系 连达军
GPS卫星星历>卫星坐标计算① 计算修正平均角速度n (1)计算修正平均角速度n
——星历表参考历元 星历表参考历元( toe ——星历表参考历元(秒), IODE(AODE)——星历表数据龄 IODE(AODE)——星历表数据龄 期, ——按参考历元 M0 ——按参考历元toe计算的平近点 弧度), 角(弧度), ——由精密星历计算得到的卫星 ∆n ——由精密星历计算得到的卫星 平均角速度与按给定参数计算所得 的平均角速度之差(弧度), 的平均角速度之差(弧度), ——轨道第一偏心率 轨道第一偏心率( ea ——轨道第一偏心率(N), ——轨道长半径的平方根 ——轨道长半径的平方根