直流调速系统的MATLAB仿真(参考程序)
基于MATLAB的直流调压调速控制系统的仿真
三、MATLAB仿真环境搭建
MATLAB提供了Simulink仿真工具,可以方便地进行控制系统的建模和仿真。在搭建直流调压调速控制系统的仿真环境时,首先需要对电机的特性进行建模,包括电机的电动力学方程、电机的转矩-转速特性曲线等。然后,设计控制器的结构和参数,通过Simulink建立相应的控制模型,最后进行仿真验证。MATLAB还提供了丰富的工具箱和函数库,如控制系统工具箱、电机控制工具箱等,能够方便地进行控制系统设计和分析。
2. 控制系统模型
在直流调压调速控制系统中,控制器起着至关重要的作用。常见的控制器包括PID控制器和模糊控制器。这些控制器可以根据电动机的工作状态和需求信号进行控制,实现对电动机速度和输出电压的精准控制。在进行仿真时,需要将控制器的数学模型结合到整个系统中,以实现对电动机的系统级控制。
在MATLAB中进行直流调压调速控制系统的仿真时,可以利用Simulink工具箱进行建模和仿真。Simulink是MATLAB的一个附加工具箱,提供了丰富的模块和功能,可以方便地对控制系统进行仿真和分析。以下是基于MATLAB的直流调压调速控制系统的仿真步骤:
五、实验结果与分析
通过MATLAB的仿真实验,我们可以得到直流调压调速控制系统的性能指标,如电机的转速曲线、电机的输出功率曲线等。根据仿真结果,我们可以对控制系统进行性能分析和优化,调整控制器的参数,改进控制策略,提高系统的稳定性和响应性能。通过仿真实验可以验证控制系统的设计是否满足实际要求,指导工程实践中的系统调试和优化。
实验三开环直流调速系统Matlab仿真

实验三开环直流调速系统Matlab仿真实训三晶闸管开环直流调速系统的 MATLAB 仿真实训一、实验实训目的1.学习并掌握晶闸管开环直流调速系统模型建立及模型参数设置的方法和步骤。
2.熟悉并掌握系统仿真参数设置的方法和步骤。
3.学会利用 MA TLAB 软件对系统进行稳态与动态计算与仿真。
4.巩固并加深对晶闸管开环直流调速系统理论知识的理解。
二、实验实训原理及知识准备1.晶闸管开环直流调速系统的原理图如图3-3-1 所示。
图 3-1 晶闸管开环直流调速系统原理图2.晶闸管开环直流调速系统的直流电动机电枢电流、电磁转矩与转速之间的关系。
3.复习实验实训指导书中MA TLAB 基本操作和MA TLAB/Simulink/Power System工具箱内容。
4.预习实验实训指导书中实验实训二,并写好预习报告。
5.画出晶闸管开环直流调速系统的动态结构图。
三、实验实训内容及步骤直流调速系统的仿真有两种方法,一是根据系统的动态结构图进行仿真,二是用Power System的相关模块仿真,下面分别对两种方法进行介绍。
方法一:使用 Simulink 中的 Power System模块对直流调速系统进行仿真1.建立系统的仿真模型和模型参数的设置(1)建立一个仿真模型的新文件。
在 MA TLAB 的菜单栏上点击工具栏上的simulink工具,选择File→New→Model,新建一个simulink文件,绘制电路的仿真模型如图 3-3-1。
3-3-1(2)按图 3-3-1 要求提取电路元器件模块。
在仿真模型窗口的菜单上点击图标调出模型库浏览器,在模型库中提取所需的模块放到仿真窗口,设置各模块参数。
晶闸管开环直流调速系统由主电路(交流电源、晶闸管整流桥、平波电抗器、直流电动机、触发电路)和控制电路(给定环节)组成,具体设置如下:1)三相交流电源的模型建立和参数设置①三相交流电源的模型建立首先从Simpowersystes 中的Electrical sources 电源模块组中选取一个交流电压源模块 AC Voltage Source,再用复制的方法得到三相电源的另两个电压源模块,用 Format(格式设定)菜单中 Rotate block(Ctrl +R)将模块水平放置,并点击模块标题名称,将模块标签分别改为“Uu ” 、“Uv ” 、“Uw ” ,然后从连接器模块 Connectors 中选取“Ground (output )”元件,按图 3-3-2 进行连接。
直流调速系统的MATLAB仿真(参考程序)
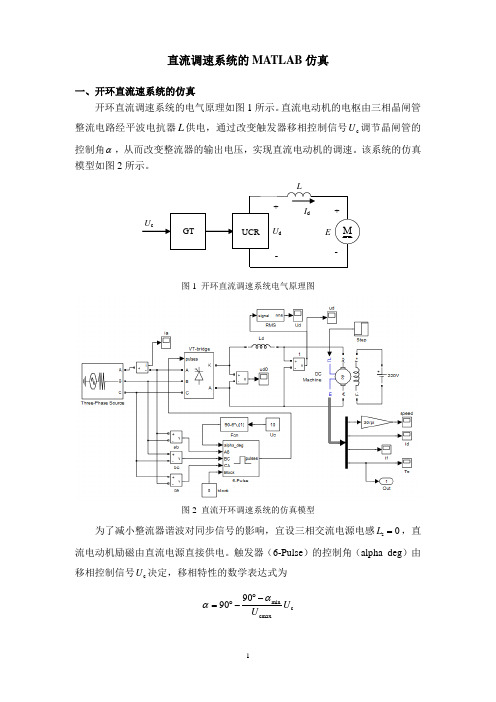
直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
N 220V U =仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
电枢电阻:a 0.2R =Ω电枢电感由下式估算:N a N N 0.422019.119.10.0021(H)2221460136CU L pn I ⨯==⨯≈⨯⨯⨯电枢绕组和励磁绕组间的互感af L :N a N e N 2200.21360.132(V min/r)1460U R I K n --⨯==≈⋅T e 60600.132 1.262π2πK K ==⨯≈ T af f 1.260.84(H)1.5K L I === 电机转动惯量2222.50.57(kg m )449.81GD J g ==≈⋅⨯③ 额定负载转矩L T N 1.26136171.4(N m)T K I ==⨯≈⋅表1 开环直流调速系统主要模型参数3)设置仿真参数:仿真算法odel5s ,仿真时间5.0s ,直流电动机空载起动,起动2.5s 后加额定负载L 171.4N m T =⋅。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真直流调压调速控制系统是一种常见的电力系统的调节器,在电力系统和机械驱动系统中广泛应用。
本文将介绍一种基于MATLAB的直流调压调速控制系统的仿真方法。
直流调压调速控制系统由电源、可调速直流电动机、电动机控制器及传感器组成。
调压调速控制系统的目标是实现恒定的速度和恒定的输出电压。
我们需要建立直流电动机的数学模型。
直流电动机的数学模型可以使用电机的等值电路模型来表示。
在这个模型中,各个元件由其等值电阻、电感和电压源表示。
通过建立电动机的等效电路模型,可以通过MATLAB对电动机的工作进行仿真。
然后,我们需要建立电动机控制器的数学模型。
电动机控制器的数学模型通常可以采用传统的PID控制器来表示。
PID控制器包括比例项、积分项和微分项。
通过设置适当的PID参数值,可以调节电动机的输出电压和速度。
接下来,我们需要建立电动机的传感器模型。
传感器用于检测电动机的实际输出电压和速度,并将其与设定值进行比较。
根据比较结果,控制器将调整输出电压和速度。
在MATLAB环境中进行仿真。
在仿真中,我们可以设置电动机的初始条件和设定值,并将其传递给控制器。
通过仿真可以观察和分析电动机的输出电压和速度的变化情况,以及控制器的响应时间和稳定性。
通过以上步骤,我们可以使用MATLAB对直流调压调速控制系统进行仿真研究。
在仿真中,可以通过调整控制器参数和传感器模型,以及改变设定值和初始条件,来观察系统的响应和性能。
仿真结果可以帮助我们设计和优化直流调压调速控制系统,提高系统的稳定性和性能。
基于MATLAB的直流调压调速控制系统的仿真方法可以帮助我们研究和优化电力系统和机械驱动系统的性能,提高系统的稳定性和可靠性。
这种仿真方法在电气工程和自动化领域有着广泛的应用前景。
直流调速系统的MATLAB仿真参考程序汇总
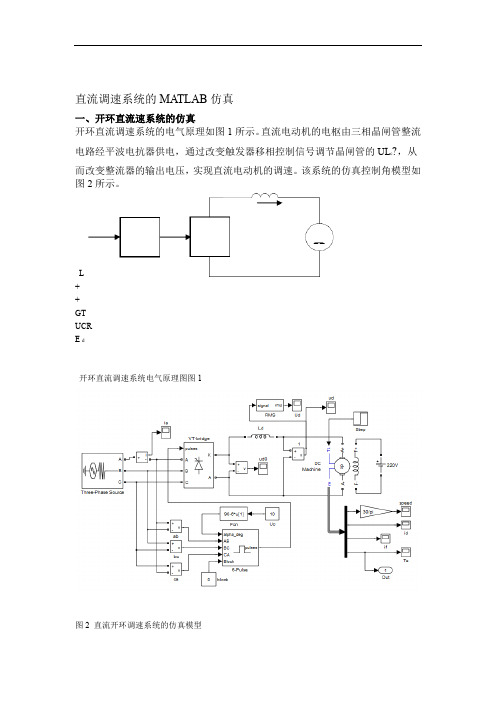
直流调速系统的MA TLAB仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器供电,通过改变触发器移相控制信号调节晶闸管的U L c ,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真控制角模型如图2所示。
L++GTUCRE d--开环直流调速系统电气原理图图1图2 直流开环调速系统的仿真模型L?0,直为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s流电动机励磁由直流电源直接供电。
触发器(6-Pulse)的控制角(alpha_deg)由U 决定,移相特性的数学表达式为移相控制信号c???90?min U?90??c U cmax 1??。
在直流电动机的负载,所以,在本模型中取U?10V6??30?90U?ccmaxmin转矩输入端用Step模块设定加载时刻和加载转矩。
T L仿真算例1已知一台四极直流电动机额定参数为,,136AIU?220V?NN22。
励磁电压,励磁电,,220VminUR?0.2??1460rn?/m?22.5NGD?fNa流。
采用三相桥式整流电路,设整流器内阻。
平波电抗器??1.5A0.3RI?recf。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动20mHL?d n、电磁转矩、电枢电流和起动后加额定负载时的电机转速及电枢电压的uTi ded变化情况。
220V?U N仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1)①供电电源电压U?RI220?0.3?136NNrec130(V)U???2?2.34?cos302.34cos?min②电动机参数励磁电阻:U220f)146.7(?R???f I1.5f励磁电感在恒定磁场控制时可取“0”。
电枢电阻:?0.2R?a电枢电感由下式估算:CU0.4?220N?19.1?L?19.1?0.0021(H)a2pnI2?2?1460?136NN L:电枢绕组和励磁绕组间的互感af U?RI220?0.2?136NNa?K?0.132(V?min/r)?e n1460N 2 6060K??0.132?K?1.26eTπ2π2K1.26T0.84(H)??L?af1.5I f电机转动惯量222.5GD2 )??0.57(kg?mJ?9.814?4g 额定负载转矩③模块参数名参数,直流电动机空载起动,5.0s3)设置仿真参数:仿真算法odel5s,仿真时间m171.4N??T 。
比例积分控制的直流调速系统matlab仿真文件
比例积分控制的直流调速系统matlab仿真文件比例积分控制的直流调速系统是一种控制直流电机转速的方法,这种方法可以通过调整比例和积分控制器的参数来实现对电机转速的精确控制。
在实际应用中,比例积分控制的直流调速系统被广泛应用于工业生产、交通运输等领域。
为了实现比例积分控制的直流调速系统的仿真,我们可以使用MATLAB软件进行仿真模拟。
下面是一个比例积分控制的直流调速系统MATLAB仿真文件的实现过程。
首先,我们需要定义一个直流电机模型。
在MATLAB中,可以使用如下代码来定义一个电机模型:```MATLABJ = 0.01;b = 0.1;K = 0.01;R = 1;L = 0.5;s = tf('s');P_motor = K/((J*s+b)*(L*s+R)+K^2);```其中,J、b、K、R、L分别表示电机的转动惯量、阻尼系数、电动势系数、电阻和电感,P_motor表示电机传递函数。
接下来,我们需要定义一个比例积分控制器模型。
在MATLAB中,可以使用如下代码来定义一个控制器模型:```MATLABKp = 0.5; % 比例系数Ki = 0.2; % 积分系数C = pid(Kp, Ki);```其中,Kp和Ki分别表示比例系数和积分系数,C表示控制器传递函数。
然后,我们需要将电机模型和控制器模型进行连接。
在MATLAB中,可以使用如下代码将其进行连接:```MATLABsys_cl = feedback(C*P_motor,1);```其中,sys_cl表示闭环系统的传递函数。
接下来,我们需要设置仿真参数,并运行仿真程序。
在MATLAB中,可以使用如下代码来设置仿真参数:```MATLABt = 0:0.01:10;r = 0.2*ones(size(t));```其中,t表示仿真时间,r表示输入信号。
然后,我们可以运行仿真程序并绘制输出结果。
在MATLAB中,可以使用如下代码来运行仿真程序并绘制输出结果:```MATLAB[y,t,x] = lsim(sys_cl,r,t);plot(t,r,'b',t,y,'r');xlabel('Time (sec)');ylabel('Speed (rad/sec)');title('DC Motor Speed Response');legend('Input','Output');```以上代码将输出仿真结果图像,其中蓝色曲线表示输入信号,红色曲线表示输出信号。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真本文将介绍基于MATLAB的直流调压调速控制系统的仿真。
直流调压调速控制器是一种常见的工业控制器。
在某些工业环境下,电机的转速和负载的变化需要由直流电机进行自动调整。
为了实现这个功能,需要用到直流调压调速控制系统。
对于大多数直流电机的应用来说,目标是精确地调整电机的转速并保持工作状态的稳定。
调节电机的转速需要对电机的所需磁场强度进行精确定义。
磁场强度的调整可以通过改变电机的额定电压来实现。
调节电机的负载需要改变电机的电流。
为了控制电机的转速和负载,需要通过控制电压和电流来实现。
在本文中,我们将演示如何使用MATLAB来模拟直流调压调速控制系统。
首先,需要建立模型。
模型的实现需要输入直流电源,与之并联的电机和控制器。
需要考虑电机的机械负载和电机本身的内阻。
控制器将根据设置的目标转速和负载来控制电机的电压和电流。
其次,需要选择适当的控制方法。
控制方法可以分为开环控制和闭环控制两种。
开环控制是将电压和时间作为输入,并根据预设的参数和控制算法来输出电机的电压和电流。
闭环控制是通过测量电机的实际转速和负载来调整电机的电压和电流,从而使其逼近预设值。
在实际应用中,通常使用闭环控制。
最后,需要设置实验参数并进行仿真。
实验参数包括直流电源和电机的额定电压、电阻和电感,以及控制器的控制参数。
仿真过程中,需要记录电机的转速、电压和电流参数,并对其进行分析和优化。
在进行仿真前,需要安装MATLAB和Simulink软件。
以下是MATLAB代码示例:```%% Define motor parametersRa = 2; % armature resistance in ohmsLa = 0.5e-3; % armature inductance in HJ = 2.5e-6; % rotor moment of inertia in kg*m^2B = 0.5e-6; % rotor viscous damping in N*m*s/rad%% Simulate the systemsim('dc_motor_control');```Simulink模型可以包括以下组件:- 直流电源模块- 直流电机模块- 控制器模块- 仿真时钟模块控制器模块可以使用PID控制器或其他类型的控制器。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真直流调压调速控制系统是一种常见的工业控制系统,广泛用于电力系统、电机驱动系统等领域。
MATLAB是一种功能强大的数学软件,可以用于建立系统的数学模型,进行仿真和控制算法的设计。
在直流调压调速控制系统中,主要包括两个部分:调压环节和调速环节。
调压环节用于控制直流电压的大小,而调速环节则用于控制直流电机的转速。
需要建立直流调压调速系统的数学模型。
以调压环节为例,可以根据直流调压系统的电路特性,建立其数学模型。
假设直流调压调速系统的输入电压为Vin,输出电压为Vout,输入电流为Iin,输出电流为Iout,则可以得到以下数学模型:Vout = K1 * Vin - K2 * IoutK1和K2分别为系统的增益参数。
接下来,需要设计调压环节的控制算法。
常见的控制算法包括比例控制、积分控制和PID控制。
假设调压环节的控制信号为U,设定电压为Vref,则可以得到以下控制算法:U = Kp * (Vref - Vout) + Ki * ∫(Vref - Vout)dt + Kd * d(Vref - Vout)/dtKp、Ki和Kd分别为比例、积分和微分参数。
然后,可以使用MATLAB进行系统仿真。
需要在MATLAB中定义系统的参数和控制算法。
然后,可以使用SIMULINK工具箱来建立系统的模型,连接各个模块,并设置输入电压和负载。
可以运行模型,观察系统的输出结果,评估系统的性能。
在仿真过程中,可以根据不同的需求和控制策略,调整系统的参数和控制算法,进行参数优化和性能改进。
基于MATLAB的直流调压调速控制系统的仿真可以帮助工程师和研究人员进行系统设计和性能评估,提高系统的稳定性和可靠性。
通过仿真还可以节省成本和时间,快速验证和优化控制算法。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真
直流调压调速控制系统是工业中常见的一种控制系统,其可用于电机调速、电压调节等应用。
本文将基于MATLAB软件进行直流调压调速控制系统的仿真,包括建立数学模型、控制策略设计、仿真实现等。
需要建立直流调压调速控制系统的数学模型。
直流电机的数学模型由电动势方程、电流方程和机械方程组成。
电动势方程描述了电机的电动势与电流之间的关系,一般可表示为:
\[E = K_φω\]
E为电动势,K_φ为反电动势常数,ω为转速。
电流方程表示了电流与电压之间的关系,一般为:
\[U_a = R_aI + L_a\frac{dI}{dt} + E\]
U_a为电压,R_a为电阻,L_a为电感。
在建立了直流调压调速控制系统的数学模型后,需要设计相应的控制策略。
通过电压闭环控制实现电压的调节。
这可以通过PID控制实现,其中PID控制器的输出作为输入电压U_a,目标电压为给定的电压值。
将电压闭环控制和转速闭环控制结合起来,形成直流调压调速控制系统。
在MATLAB软件中,可以使用Simulink进行直流调压调速控制系统的仿真。
根据上述的数学模型,建立相应的模型图。
然后,在模型图中添加PID控制器和给定的电压、转速参考信号等输入。
根据设计的控制策略,调整PID控制器的参数。
运行仿真并观察系统的响应。
通过仿真实验,可以验证直流调压调速控制系统的性能,并根据需要进行参数调整和系统优化。
基于MATLAB的直流调压调速控制系统的仿真
基于MATLAB的直流调压调速控制系统的仿真一、直流调压调速控制系统的原理直流调压调速控制系统主要由电压控制回路和速度控制回路组成。
电压控制回路用于控制电动机的电压,从而实现电动机的调压;速度控制回路用于调整电动机的转速,实现电动机的调速。
电压控制回路和速度控制回路之间是相互联系的,二者协同工作才能使电动机达到预定的工作状态。
在本文的仿真中,我们将重点关注电压控制回路和速度控制回路的设计和性能。
二、仿真模型的建立在MATLAB中,我们可以通过Simulink工具建立直流调压调速控制系统的仿真模型。
我们需要建立电动机的数学模型,包括转矩方程、速度方程和电压方程;我们需要设计电压控制回路和速度控制回路的控制算法和参数。
将电动机模型和控制回路结合在一起,形成直流调压调速控制系统的仿真模型。
三、电压控制回路的仿真分析电压控制回路的主要任务是根据速度控制回路的信号要求,生成电压信号并送往电动机,控制电动机的转矩。
在仿真中,我们可以通过改变输入信号的幅值和频率,观察电压控制回路的响应特性,比如超调量、调节时间等。
我们也可以通过引入一些干扰信号,例如负载扰动,来观察电压控制回路的抗扰性能。
通过仿真分析,我们可以得出电压控制回路设计的满意度和稳定性。
五、整体系统的仿真分析经过对电压控制回路和速度控制回路的单独仿真分析后,我们可以将两者结合在一起,形成整体的直流调压调速控制系统的仿真模型。
通过整体系统的仿真分析,我们可以评估控制系统的性能和稳定性。
我们可以观察系统在不同工作状态下的响应特性,比如启动、调压和调速的过程中的响应速度、控制精度和稳定性。
我们也可以引入一些复杂的工况和干扰信号,例如负载变化和电网故障,来观察整体系统的鲁棒性和抗干扰能力。
通过仿真分析,我们可以评估整体系统的设计合理性和可靠性。
六、结论通过MATLAB的仿真分析,我们可以对直流调压调速控制系统的性能和稳定性进行全面评估。
我们可以深入了解电压控制回路和速度控制回路的设计和性能,找出设计的不足和改进的方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
MU d+I dGTU cE +--UCR图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
N 220V U =仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
电枢电阻:a 0.2R =Ω电枢电感由下式估算:N a N N 0.422019.119.10.0021(H)2221460136CU L pn I ⨯==⨯≈⨯⨯⨯电枢绕组和励磁绕组间的互感af L :N a N e N 2200.21360.132(V min/r)1460U R I K n --⨯==≈⋅T e 60600.132 1.262π2πK K ==⨯≈ T af f 1.260.84(H)1.5K L I === 电机转动惯量2222.50.57(kg m )449.81GD J g ==≈⋅⨯③ 额定负载转矩L T N 1.26136171.4(N m)T K I ==⨯≈⋅表1 开环直流调速系统主要模型参数3)设置仿真参数:仿真算法odel5s ,仿真时间5.0s ,直流电动机空载起动,起动2.5s 后加额定负载L 171.4N m T =⋅。
4)进行仿真并观察、分析结果(图3)。
(可以用语句plot(tout,yout)进行示波器的曲线处理。
)图3 开环直流调速系统的仿真结果二、转速闭环直流调速系统的仿真带转速负反馈的有静差直流调速系统的电气原理如图4所示,系统由转速给定环节*n U 、转速调节器ASR (放大器p K )、移相触发器GT 、晶闸管整流器UCR和直流电动机M 和测速发电机TG 等组成。
MU d+I dL GT U cE +--UCR TGASR+ -∆U n U n*n U图4 转速闭环直流调速系统电气原理图图5 转速闭环直流调速系统的仿真模型转速负反馈有静差直流调速系统的仿真模型如图5所示,模型在图2开环调速系统的基础上,增加了转速给定*n U ,转速反馈n-feed 、放大器Gain 和反映放大器输出限幅的饱和特性模块Saturation ,饱和限幅模块的输出是移相触发器的控制电压c U ,转速反馈直接取自电动机的转速输出,没有另加测速发电机,取转速反馈系数*nmn NU K n =。
仿真算例2 在算例1的基础上观察转速负反馈系统在不同放大器放大倍数时对转速变化的影响。
仿真步骤:1)绘制系统的仿真模型(图5)。
2)设置模块参数(表2)。
3)设置仿真参数:仿真算法odel5s,仿真时间1.5s,直流电动机空载起动,起动0.5s后加额定负载L 171.4N mT=⋅。
4)进行仿真并观察、分析结果(图6):(用语句plot(tout1,yout1,tout2,yout2,tout3,yout3)进行示波器的曲线处理。
)表2 转速闭环直流调速系统主要模型参数图6 转速闭环直流调速系统的仿真结果三、转速电流双闭环直流调速系统的仿真转速电流双闭环直流调速系统的电气原理如图7所示,由于晶闸管整流器不能通过反向电流,因此不能产生反向制动转矩而使电动机快速制动。
图7 转速电流双闭环直流调速系统的电气原理图双闭环直流调速系统的仿真可以依据系统的动态结构图(图8a)进行,也可以用SIMULINK的Power System模块来组建。
两种仿真的不同在于主电路,前者晶闸管和电动机用传递函数来表示,后者晶闸管和电动机使用Power System 模块,而控制部分则是相同的。
下面对这两种方法分别进行介绍。
1. 基于动态结构图的双闭环直流调速系统仿真双闭环直流调速系统的实际动态结构图如图8b所示,它与图8a的不同之处在于增加了滤波环节,包括电流滤波、转速滤波和两个给定信号的滤波环节。
这是因为电流检测信号中常含有交流分量,为了不使它影响到调节器的输入,需加低通滤波。
这样的滤波环节的传递函数可用一阶惯性环节来表示,其滤波时间常数oiT可按需要选定,以滤平电流检测信号为准。
然而,在抑制交流分量的同时,滤波环节也延迟了反馈信号的作用,为了平衡这个延迟作用,在给定信号通道上加入一个同等时间常数的惯性环节,称作给定滤波环节。
其意义是,让给定信号和反馈信号经过相同的延时,使二者在时间上得到恰当的配合,从而带来设计上的方便。
同样,由测速发电机得到的转速反馈电压信号含有换向纹波,因此也需要滤波,滤波时间常数用onT表示。
根据和电流环一样的道理,在转速给定通道上也加入时间常数为onT的给定滤波环节。
G ASR ss1KT s+U dK nI dU*nU n+ +--U c E n1/1lRT s+mRT se1KI dL+-K iU*i +-G ACRU ia)b)图8 转速电流双闭环直流调速系统的动态结构图依据系统动态结构图的仿真模型如图9所示,仿真模型与系统动态结构图的各个环节基本上是对应的。
需要指出的是,双闭环系统的转速和电流两个调节器都是有饱和特性和带输出限幅的PI调节器,为了充分反映在饱和和限幅非线性影响下调速系统的工作情况,需要构建考虑饱和和输出限幅的PI调节器,过程如下:线性PI 调节器的传递函数为i pi p p1()k sW s k k s s+=+=ττ 式中,p k 为比例系数,i k 为积分系数,时间常数p i /k k =τ。
上述PI 调节器的传递函数可以直接调用SIMULINK 中的传递函数或零极点模块,而考虑饱和和输出限幅的PI 调节器模型如图10所示。
模型中比例和积分环节分为两个通道,其中积分模块Integrate 的限幅表示调节器的饱和限幅值,而调节器的输出限幅值由饱和模块Saturation 设定。
图9 转速电流双闭环直流调速系统仿真模型图10 带饱和和输出限幅的PI 调节器仿真算例3 以算例1的晶闸管-直流电动机系统为基础,设计一个转速电流双闭环控制的调速系统,设计指标为:转速超调量n %10%σ≤,电流超调量i %10%σ≤,过载倍数 1.5λ=,取电流反馈滤波时间常数oi 0.002s T =,转速反馈滤波时间常数on 0.01s T =,取转速调节器和电流调节器的饱和值为12V ,输出限幅值为10V 。
额定转速时转速给定电压*nm10V U =。
通过仿真观察系统的转速、电流响应,以及参数变化(主要是调节器参数)对系统响应的影响。
仿真步骤:1)构建系统的仿真模型(图9)。
2)设置模块参数(调节器参数计算和设定) ① 机电时间常数:m 0.161s T =电磁时间常数:0.076s l T =三相晶闸管整流电路平均失控时间:s 0.0017s T =② 电流调节器ACR 参数的计算*电流反馈系数:*im i N 100.05(V/A)1.5136U K I λ==≈⨯电流环时间常数之和i s oi 0.00170.0020.0037(s)T T T ∑=+=+= ACR 的传递函数为i ACR pi iipi i 11(s)s W K K K s sττ+=+=,其中 时间常数i 0.076s l T ==τ 比例系数i pi Σi S i0.0760.52.57220.0037400.05Rk T K K ⨯==≈⨯⨯⨯τ积分系数piii i2.5733.80.076k k ==≈τ ③ 转速调节器ASR 参数的计算*转速反馈系数:*nm n N 100.00667(V min/r)1500U K n ==≈⋅电流环等效时间常数i 220.00370.0074(s)T ∑=⨯=转速环时间常数之和n i on 220.00370.010.0174(s)T T T ∑∑=+=⨯+=。
ASR 的传递函数为n ASR pn pipn n 11(s)s W k k k s s+τ=+=τ,其中 时间常数n n 50.01740.087(s)hT ∑τ==⨯= 比例系数i e m pn n n (1)60.050.1320.16110.992250.006670.50.0174h K K T K hK RT ∑+⨯⨯⨯==≈⨯⨯⨯⨯积分系数pn in n10.99126.30.087k k ==≈τ (选择中频段宽度5h =)模型各环节参数如图9所示,其中调节器参数见表3,调节器积分环节限幅值为12V±,调节器输出限幅值为10V±。
表3 转速电流双闭环直流调速系统主要模型参数3)设置仿真参数:仿真算法odel5s,仿真时间2.0s,电动机空载起动,起动0.8s后突加额定负载(dL N 136AI I==)。
4)进行仿真并观察、分析结果(图11):a)b )图11 基于动态结构图的双闭环直流调速系统仿真结果2. 基于Power System 模块的双闭环直流调速系统仿真采用SIMULINK 的Power System 模块组成的转速电流双闭环直流调速系统的仿真模型如图12所示,模型由晶闸管-直流电动机组成的主电路和转速、电流调节器组成的控制电路两部分构成。
其中的主电路部分,交流电源、晶闸管整流器、触发器、移相控制和电动机等环节使用Power System 模型库中的模块。