AMESim-MATLAB联合仿真详细设置+部分问题解决步骤
amesim与matlab联合仿真参数设置(精)
Amesim 与 matlab 联合仿真参数设置实验软件平台Matlab2009a , amesimR8a , VC6.0企业版步骤:1 将 VC++中的 "vcvar32.bat" 文件从 Microsoft Visual C++目录(通常是 .\Microsoft Visual Studio\VC98\Bin中拷贝至 AMESim 目录下。
2 设置环境变量:我的电脑 -〉属性 -〉高级 -〉环境变量。
设置 AMESim 环境变量:变量名 AME , 值为其安装路径如安装在 C 盘中则值为 C:\。
设置 Matlab 环境变量:变量名MATLAB 值为 D:\MATLAB701。
确认在系统变量 PATH 中包含系统安装目录C:\WINNT\System323 在 Matlab 的目录列表里加上 AMESim 与 Matlab 接口文件所在的目录 %AME%\matlab\amesim。
File-〉 Set Path-〉 Add Folder 加上C:\AMEsim\matlab\amesim。
(注意 amesimR8A 是将 %AME%\scripting\matlab\amesim设置到 MATLAB 路径中4 将联合仿真的许可证文件 licnese.dat 拷贝到 AMESim 安装目录下的 licnesing 文件夹中5 确认是否在 AMESim 中选择 VC 作为编译器。
具体操作在AMESim-〉 Opions-> AMESim Preferences->Compilation/Parameters中。
. 在MATLAB 命令窗口中输入命令 Mex -setup , 选择 VC 作为编译器。
如果上面设置成功下面不用看下面给出 amesim4.0版本设置方法为了实现二者的联合仿真,需要在 Windows2000或更高级操作系统下安装Visual C++ 6.0,AMESim4.2以上版本与 MATLAB6.1上版本 (含 Simulink1. 将 VC++中的 "vcvar32.bat" 文件从 Microsoft Visual C++目录(通常是 .\Microsoft Visual Studio\VC98\Bin中拷贝至 AMESim 目录下。
史上最全的AMESim-Matlab 联合仿真设置步骤(集大成者,图文并茂)
史上最全的AMESim-Matlab 联合仿真设置步骤(集大成者,图文并茂)中国矿业大学机电学院 haierdhg目前,文库及网上流行的AMESim-Matlab 联合仿真步骤基本不能用,经过几天的研究,终于找到了解决方案。
本文论述了联合仿真的设置步骤、仿真时应注意的事项,以及有用的参考资料,敬请大家分享。
一、版本为AMESim8.0,Matlab2011b,VC++6.0二、安装步骤个人认为以上三个软件,没有安装顺序,但还是建议先安装VC++1.将VC++中的"vcvar32.bat"文件从Microsoft Visual C++目录(通常是.\Microsoft Visual Studio\VC98\Bin中)拷贝至AMESim目录下(我的是C:\AMESim\v800)。
(如果先安装的VC,后安装的AMESim,则在AMESim安装时,自动会拷贝该文件)2.环境变量确认:(这里网上的教程大多是错的!环境变量分为用户变量和系统变量,网上教程大多没说清楚)1)选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”;2)在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”;3)用户变量中添加HOME C:\ (我将AMESim Matlab装在了C盘,自己根据情况修改) MATLAB C:\MATLAB\R2011bPath D:\Program Files\Microsoft Visual Studio\Common\Tools\WinNT;D:\Program Files\Microsoft VisualStudio\Common\MSDev98\Bin;D:\Program Files\Microsoft Visual Studio\Common\Tools;D:\Program Files\Microsoft Visual Studio\VC98\bin4)在系统变量中添加AME C:\AMESim\v800 (这个一般都有的,不需要自己添加);Path D:\Program Files\Microsoft Visual Studio;C:\AMESim\v800;C:\AMESim\v800\win32;C:\AMESim\v800\sys\mingw32\bin;C:\AMESim\v800\sys\mpich\mpd\bin;C:\AMESim\v800\sys\cgns;%SystemRoot%\system32;%SystemRoot%;%SystemRoot%\System32\Wbem;C:\MATLAB\R2011b\bin\win32;C:\WINDOWS\system32;C:\WINNT (该处很重要一定要添加,而且一定要包含C:\WINDOWS\system32,不然会有引起很多错误)3.确认是否在AMESim中选择VC作为编译器。
关于AMESim和MATLAB隧道多功能台车液压系统联合仿真
2015年11月第43卷第22期机床与液压MACHINETOOL&HYDRAULICSNov 2015Vol 43No 22DOI:10.3969/j issn 1001-3881 2015 22 036收稿日期:2014-09-10作者简介:陶柳(1986 ),男,硕士研究生,主要研究方向流体传动与控制㊂E-mail:717796815@qq com㊂基于AMESim和MATLAB的隧道多功能台车液压系统联合仿真陶柳1,何奇2(1 四川工程职业技术学院车辆工程系,四川德阳618000;2 长沙长泰机器人有限公司机器人研究院,湖南长沙410117)摘要:设计了隧道多功能作业台车工作装置液压系统的关键回路 联动调平回路,利用AMESim和MATLAB软件对该系统进行联合仿真,分析仿真数据可知:系统回路和阀件选型在当前设计下能够满足实际工况要求㊂关键词:AMESim/MATLAB联合仿真;联动调平回路中图分类号:TB123㊀㊀文献标志码:A㊀㊀文章编号:1001-3881(2015)22-108-3Co⁃simulationofHydraulicSystemofTunnelMulti⁃functionOperationsTrolleyBasedonAMESimandMATLABTAOLiu1,HEQi2(1 DepartmentofVehicleEngineering,SichuanEngineeringTechnicalCollege,DeyangSichuan618000,China;2 RobotResearchInstitute,ChangshaChangtaiRobotCo.,Ltd.,ChangshaHunan410117,China)Abstract:Thekeycircuitofhydraulicsystemoftunnelmulti⁃functionoperationstrolley:linkagelevelingloopwasdesigned.AMESimandMATLABco⁃simulationwascompleted.Thesimulationresultsindicatethatsystemcontrolloopandvalveselectioncanmeettherequirementsoftheactualworkingconditionsunderthecurrentdesign.Keywords:AMESim/MATLABco⁃simulation;Linkagelevelingloop㊀㊀隧道多功能作业台车是集机㊁电㊁液于一体的现代特种作业装备,从样机的造价比例来看,投入液压设备的资金已达到台车总造价的30%㊂在样机的生产过程中,如果出现阀件重复替换,除了造成资金的浪费使制造成本增加外,还会大大延缓台车的研发周期㊂运用计算机仿真技术对设计的液压系统关键控制回路进行分析,不仅可以缩短液压系统的开发周期,还能避免反复试验和采购带来的经济损失㊂通过前期仿真结果预判所设计液压系统的稳定可靠程度,使设计人员做到胸有成竹㊂对比一系列的液压系统仿真软件,AMESim具有在仿真过程中通用性强㊁元件模型库配备完善㊁建模直观简单且仿真精度较高等优点,因而成为了对液压系统进行故障诊断和设计仿真时的首选㊂如:汪宇亮基于工程机械液压系统的故障诊断,验证了基于AMESim的仿真分析方法是液压系统故障诊断的一个有效途径,并证明了应用功率流的建模思想可以实现液压系统的故障注入[1];陆雪峰通过分析锚杆支护作业平台液压系统的组成和工作特点,使用AMESim液压库子模型对平台泵变量系统进行了建模和仿真,验证了泵变量系统的工作特性符合实际工作要求[2-3]目前我国隧道作业台车刚刚起步,国内对台车液压系统关键控制回路的仿真案例近乎为零,因此作者在借鉴其他领域液压系统仿真实例的基础上,采用AMESim和MATLAB软件进行联合仿真,分析并验证系统在当前设计下的稳定性和合理性,希望能为后续台车液压系统的开发提供一定的思路和帮助㊂1㊀动臂与调平联动模块建立研究发现,隧道多功能作业台车动臂升降过程中平台的稳定性是通过动臂油缸与调平油缸的联动变化控制的㊂分析计算得出:当动臂油缸与调平油缸伸缩变化量满足1 167ʒ1的比例关系时,升降过程中平台相对于水平面的倾角变化最小[4]㊂因而当进行联动控制时,动臂油缸与调平油缸必须同时供油,且流量大小还需通过调速阀进行严格比例控制㊂最后设计绘制如图1所示动臂与调平联动模块的液压控制原理图㊂设计中考虑在工作中调平油缸也必须具备保持功能,所以调平调速互锁集成阀块内除含有两个单向调速阀外,还包括双液控单向锁㊂图1㊀动臂与调平联动控制模块油路2 液压系统建模与仿真2 1㊀模型的建立利用AMESim液压元件库(Hydraulic)㊁信号元件库(Signal,Control)㊁机械元件库(Mechanical)和HCD模型库(HydraulicComponentDesign)以及接口模块共同建立联动调平控制回路的仿真模型,如图2所示㊂图2㊀仿真模型图2中,油源㊁溢流阀㊁换向阀㊁单向调速阀㊁液压缸㊁液压锁㊁位移传感器和信号源等元器件均在元件库中直接选取㊂根据定级及流量计算数据[3],各元器件仿真主要参数见表1㊂表1㊀控制回路仿真模型主要参数设置名称参数数值液压油源流量/(L㊃min-1)300密度/(kg㊃m-3)812溢流阀开启压力/MPa25换向阀延迟开启时间/s0.5双动臂油缸单向调速阀正向通流量/(L㊃min-1)190单向阀通流量/(L㊃min-1)200反向压损/MPa0 5调平油缸单向调速阀正向通流量/(L㊃min-1)65单向阀通流量/(L㊃min-1)100反向压损/MPa0 5液压锁正向通流量/(L㊃min-1)100正向压损/MPa0 2动臂液压缸液压缸活塞直径/mm140液压缸活塞杆直径/mm100液压缸行程/m1.48调平液压缸液压缸活塞直径/mm125液压缸活塞杆径/mm90液压缸行程/m1.48位移传感增益10002 2㊀仿真结果模拟两动臂油缸实际工况同步特性时,其左右两边所受负载力是不相同的,前期在位移与负载函数的建立过程中,已将左右两边负载偏差拟定为95%㊂仿真执行完成后,查看左右动臂油缸位移曲线和位置偏差量曲线分别如图3和图4所示㊂图3㊀左右动臂油缸的位移曲线㊀㊀㊀㊀图4㊀左右动臂油缸位移偏差曲线可以看出:左右动臂油缸存在一定偏差,且随着平台举升高度的升高,位移累积偏差增大,其最大累积偏差可达17 45mm㊂而分析表明油缸伸长量越大所受负载力变小,故在位移偏差较大的地方其所受负载力相对很小,因而不会有单边油缸超负荷现象的产生,这样油缸的使用寿命和平台的安全性得到保证㊂㊃901㊃第22期陶柳等:基于AMESim和MATLAB的隧道多功能台车液压系统联合仿真㊀㊀㊀㊀㊀图5和图6分别为左右动臂油缸速度曲线和速度偏差曲线㊂由图5可知:在油缸开始运动和停止运动时均产生一定的液压冲击,换向阀开启缓冲时间约为0 3s,左右油缸的速度基本维持在0 1m/s,持续运动约14s油缸伸长至最大行程处㊂图6表明:左右动臂速度偏差值很小,这得益于分流集流阀的自动调节作用㊂下面通过查看分流集流阀进出口流量分析动臂抬升过程中阀件的分流精度㊂图5㊀左右动臂油缸速度曲线㊀㊀㊀㊀㊀图6㊀左右动臂油缸速度偏差曲线图7为动臂抬升过程中分流集流阀的进口流量曲线,在前端调速阀的控制下,其稳态流量Qs=190 014L/min;图8表示动臂抬升过程中分流集流阀左右端的出口流量曲线,由于作用于左右动臂油缸的负载不同,导致左右端出口流量存在一定的偏差㊂图中所示,分流集流阀左端出口流量为Q1=94 4882L/min,右端出口流量为Q2=95 5939L/min㊂图7㊀动臂抬升过程中分流集流阀进口流量曲线㊀㊀㊀㊀图8㊀动臂抬升过程中分流集流阀出口流量曲线为了分析分流集流阀的分流精度,引入阀件速度同步误差公式如[2]:δ=2ˑQ1-Q2Qsˑ100%(1)讨论分流集流阀稳态过程的速度同步误差,将稳态时进出口流量Q1㊁Q2和Qs代入上式,即可求得分流集流阀的速度同步误差为:㊀㊀δ=2ˑ94 4882-95 5939190 014ˑ100%ʈ1 16%(2)由此可知,选用该参数的分流集流阀在此工况下速度同步误差很小,能很好地适应此工况下的分流要求㊂研究得知当执行元件的负载力Fx引起调速阀进出口压力差的变化超过最小压差时,此时节流阀进出口压差为定值[4]㊂而从图5和图8中速度和流量曲线可以看出,左右动臂油缸的运动速度和进口流量在调速阀和分流集流阀的作用下基本维持恒定,由此可知,左右动臂油缸的进口压力一定如图9所示随负载变化而不断发生变化㊂图9㊀动臂油缸大腔进口压力曲线通过仿真结果可知:在实际工况的联合仿真中,由于平台自重㊁调速阀㊁分流集流阀等的存在,双动臂油缸的同步精度㊁联动调平过程中平台的升降平稳性在此设计回路中可以得到保证㊂3㊀小结采用AMESim和MATLAB/Simulink联合仿真的方式,在实际工况下对重要控制回路进行适应性探讨,分析了左右臂油缸的位移㊁速度以及分流集流阀进出口流量的变化㊁误差曲线㊂通过仿真结果可知,在实际工况的联合仿真中,双动臂油缸的同步精度㊁联动调平过程中平台的升降平稳性在此设计回路中可以得到保证㊂参考文献:[1]汪宇亮.基于AMESim的工程机械液压系统故障仿真研究[D].武汉:武汉理工大学,2012.[2]陆雪峰.锚杆支护作业平台的设计与仿真研究[D].青岛:山东科技大学,2012.[3]陈子建,王振涛,赵华.液压系统节流调速回路分析及应用[J].机床与液压,2010,38(4):58-60.[4]何奇.隧道多功能作业台车工作装置液压系统开发与研究[D].湘潭:湘潭大学,2013.㊃011㊃机床与液压第43卷。
论文基于AMESim与MatlabSimulink联合仿真技术的接口...
论文:基于A M E S i m与M a t l a b\S i m u l i n k联合仿真技术的接口与应用研究基于AMESim与Matlab\Simulink联合仿真技术的接口与应用研究摘要:根据AMESim与Matlab\Simulink软件各自的特点,对两者联合仿真技术进行了研究,解决了联合仿真的接口与实现问题,并把该技术应用于电液位置伺服系统,取得了良好效果关键词:AMESim,Matlab\Simulink,联合仿真,电液伺服系统1 引言法国lmagine公司开发的AMESim是当今领先的流体,传动系统和液压/机械系统建模,仿真及动力学分析软件.它为用户提供了一个系统工程设计的完整平台,可以建立复杂的多学科领域系统的数学模型,并在此基础上进行仿真计算和深入的分析.然而,不存在一种仿真软件平台能够提供工程设计所需要的所有功能。
AMESim作为多学科领域系统仿真设计的平台提供了丰富的与其他软件的接口。
基于Matlalb平台的Simulink是动态系统仿真领域中著名的仿真集成环境,它在众多领域得到广泛应用。
Simulink 借助Matlalb的计算功能,可方便地建立各种模型、改变仿真参数,很有效地解决仿真技术中的问题。
AMESim作为一个完整的系统工程仿真平台,Simulink作为事实上的控制系统设计的标准平台。
点对点的AMESim-Simulink接口提供了一个使用便捷和行之有效的工具用于AMESim的被控对象模型和控制系统模型之间的耦合分析。
同时利用了AMESim和Simulink的最佳功能,避免了不同平台之间复杂模型的重建。
2 联合仿真设置与实现2.1 联合仿真设置1 将VC++中的"vcvar32.bat"文件从Microsoft Visual C++目录(通常是.\Microsoft Visual Studio\VC98\2 设置环境变量:我的电脑-〉属性-〉高级-〉环境变量。
AMEsim与Matlab_simulink联合仿真技术
目录摘要 (1)0 引言 (1)1 联合仿真技术 (2)1.1 联合仿真技术的特点与应用 (2)1.2 联合仿真技术的实现途径 (2)2 联合仿真接口技术 (3)2.1 系统环境配置 (3)2.2 系统编译器配置 (3)3 联合仿真应用举例 (5)4 结论 (8)致谢 (8)参考文献 (9)AMESim与Matlab_Simulink联合仿真技术机械电子系0802班李敏M200870228摘要:根据AMESim与Matlab/Simulink软件各自的特点,对两者联合仿真技术进行了研究,解决了联合仿真的接口与实现问题,并把该技术应用于电液位置伺服系统的仿真,取得了良好的效果。
关键词:AMESim;Matlab/Simulink;联合仿真;接口Abstract:United Matlab/Simulink technique with AMESim and Matlab/Simulink was discussed based on their own characteristics. The problem of their interface and realization were solved. As an applied example, Matlab/Simulink of electro hydraulic servo-system was shown. Good results were achieved.Keywords:AMESim;Matlab/Simulink;United simulation;Interface0 引言传统的设计方法往往是通过反复的样品试制和试验来分析该系统是否达到设计要求,结果造成大量的人力和物力投入在样品的试制和试验上。
随着计算机仿真技术的发展,在工程系统的软件设计开发中,大量地采用了数值成型的方法,即通过建立系统的数值模型,利用计算机仿真使得大量的产品设计缺陷在物理成型之前就得到了处理,从而可以使企业在最短的时间、以最低的成本将新产品投放到市场。
高版本AMESim-MATLAB联合仿真详细设置步骤
高版本AMESim—MATLAB联合仿真设置详细步骤说明:现以AMESimR12、MATLAB2010a为例说明,其他版本类似。
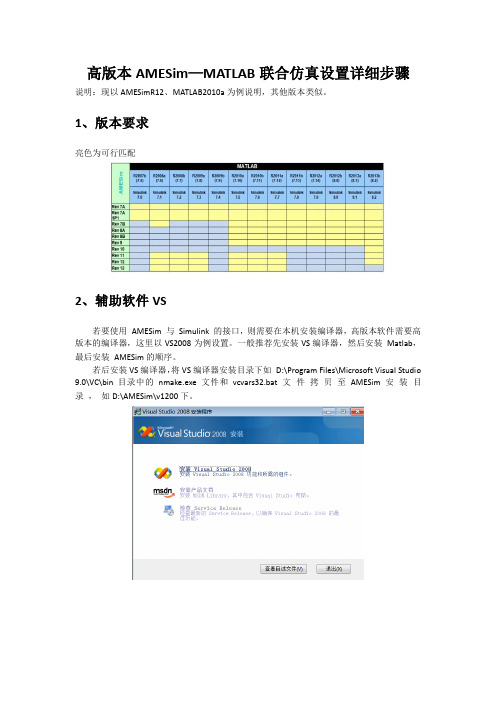
1、版本要求亮色为可行匹配2、辅助软件VS若要使用AMESim 与Simulink 的接口,则需要在本机安装编译器,高版本软件需要高版本的编译器,这里以VS2008为例设置。
一般推荐先安装VS编译器,然后安装Matlab,最后安装AMESim的顺序。
若后安装VS编译器,将VS编译器安装目录下如D:\Program Files\Microsoft Visual Studio 9.0\VC\bin目录中的nmake.exe 文件和vcvars32.bat 文件拷贝至AMESim 安装目录,如D:\AMESim\v1200下。
3、环境变量设置定义Windows 系统环境变量:1)选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”;2)在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”;3)用户变量中添加HOME D:\MATLAB D:\MATLAB\R2010aPath D:\Program Files\Microsoft Visual Studio 9.0\Common7\Tools;D:\Program Files\Microsoft Visual Studio 9.0\VC\bin;D:\Program Files\Microsoft Visual Studio 9.0\VC\bin;D:\MATLAB\R2010a\bin;D:\MATLAB\R2010a\bin\win324) 在系统变量中添加在Path 环境变量中加入(以分号与其它已经存在的变量值隔开)路径:Matlab_Root( 如D:\Matlab\R2010a)\bin 和Matlab_Root( 如D:\Matlab\R2010a)\bin\win32 ,以及%windir%\System32,其中%windir%指的是Windows 的安装路径,如C:\WINNT Path D:\Program Files\Microsoft Visual Studio 9.0;D:\AMESim\v1200;D:\AMESim\v1200\win32;D:\AMESim\v1200\sys\mingw32\bin;D:\AMESi m\v1200\sys\mpich\mpd\bin;D:\AMESim\v1200\sys\cgns;%SystemRoot%\system32;%SystemRo ot%;%SystemRoot%\System32\Wbem;D:\MATLAB\R2010a\bin\win32;C:\WINDOWS\system32;C: \WINNT4、AMESim与MATLAB设置启动AMESim并确认AMESim 使用的是MS C++编译器从AMESim 菜单下选择Tools、Options,然后选择AMESim Preferences,按下图界面设置AMESim 编译器为C++编译器,apply——OK在第一次使用AMESim 和Simulink 接口时,请在Matlab命令行窗口输入以下命令以确认其所使用的编译器:mex –setup(注意,mex 后面加一空格)。
高版本AMESim-MATLAB联合仿真详细设置步骤
高版本AMESim—MATLAB联合仿真设置详细步骤说明:现以AMESimR12、MATLAB2010a为例说明,其他版本类似。
1、版本要求亮色为可行匹配2、辅助软件VS若要使用AMESim 与Simulink 的接口,则需要在本机安装编译器,高版本软件需要高版本的编译器,这里以VS2008为例设置。
一般推荐先安装VS编译器,然后安装Matlab,最后安装AMESim的顺序。
若后安装VS编译器,将VS编译器安装目录下如D:\Program Files\Microsoft Visual Studio 9.0\VC\bin目录中的nmake.exe 文件和vcvars32.bat 文件拷贝至AMESim 安装目录,如D:\AMESim\v1200下。
3、环境变量设置定义Windows 系统环境变量:1)选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”;2)在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”;3)用户变量中添加HOME D:\MATLAB D:\MATLAB\R2010aPath D:\Program Files\Microsoft Visual Studio 9.0\Common7\Tools;D:\Program Files\Microsoft Visual Studio 9.0\VC\bin;D:\Program Files\Microsoft Visual Studio 9.0\VC\bin;D:\MATLAB\R2010a\bin;D:\MATLAB\R2010a\bin\win324) 在系统变量中添加在Path 环境变量中加入(以分号与其它已经存在的变量值隔开)路径:Matlab_Root( 如D:\Matlab\R2010a)\bin 和Matlab_Root( 如D:\Matlab\R2010a)\bin\win32 ,以及%windir%\System32,其中%windir%指的是Windows 的安装路径,如C:\WINNT Path D:\Program Files\Microsoft Visual Studio 9.0;D:\AMESim\v1200;D:\AMESim\v1200\win32;D:\AMESim\v1200\sys\mingw32\bin;D:\AMESi m\v1200\sys\mpich\mpd\bin;D:\AMESim\v1200\sys\cgns;%SystemRoot%\system32;%SystemRo ot%;%SystemRoot%\System32\Wbem;D:\MATLAB\R2010a\bin\win32;C:\WINDOWS\system32;C: \WINNT4、AMESim与MATLAB设置启动AMESim并确认AMESim 使用的是MS C++编译器从AMESim 菜单下选择Tools、Options,然后选择AMESim Preferences,按下图界面设置AMESim 编译器为C++编译器,apply——OK在第一次使用AMESim 和Simulink 接口时,请在Matlab命令行窗口输入以下命令以确认其所使用的编译器:mex –setup(注意,mex 后面加一空格)。
amesim、MatlaB联合仿真(最全面)接口设置

amesim、MatlaB联合仿真(最全⾯)接⼝设置1、我们先要确定所使⽤的电脑上已经安装版本匹配的软件,必要的软件是visualstdio也就是vc++,我使⽤的vs版本是2010;MatlaB,我使⽤的是2011b;amesim,我使⽤的是amesim 12.0版本。
PS:这⼏个版本的匹配情况请参阅LMS那边提供的帮助⽂档。
2、在默认版本安装成功的情况下,我们来设置⼀下环境变量:(1)我们要是设置⽤户变量:1)变量名:MatlaB,值为:D:\Program Files\MATLAB\R2011b,如图所⽰2)设置第⼆个⽤户变量,变量名:Path,值为:D:\Program Files\MATLAB\R2011b\bin\win64,如图所⽰那么,我们默认以上两个⽤户变量已经设置完毕。
(2)我们设置系统变量,我们找到系统变量的Path变量,点击编辑这⾥我建议把系统变量的Path复制出来检查⼀下⼏个变量是否已经添加C:\Program Files\Microsoft HPC Pack 2008 R2\Bin\;%AME%;%AME%\win32;%AME%\win64;%AME%\sys\mingw32\bin;%AME%\sys\mpich\mpd\bin;%AME%\sys\cgns;%AME%\sys\python\win32;C:\Program Files (x86)\Intel\iCLS Client\;C:\Program Files\Intel\iCLS Client\;%SystemRoot%\system32;%SystemRoot%;%SystemRoot%\System32\Wbem;%SYSTEMROOT%\System32\WindowsPowerShell\v1.0\;C:\Program Files\Intel\Intel(R) Management Engine Components\DAL;C:\Program Files\Intel\Intel(R) Management Engine Components\IPT;C:\Program Files (x86)\Intel\Intel(R) Management Engine Components\DAL; C:\Program Files (x86)\Intel\Intel(R) Management Engine Components\IPT;d:\Program Files\MATLAB\R2011b\runtime\win64;d:\Program Files\MATLAB\R2011b\bin;D:\abaqus6134\Commands;D:\Program Files\MATLAB\R2011b\bin\win64;D:\Program Files (x86)\Microsoft Visual Studio 10.0这个可能需要动⼿⾃⼰添加我这⾥的%AME%表⽰amesim的安装⽬录注意:⼀定要检查系统变量添加的完全,我们看⼀下帮助⽂档提供的⼏个需要设置的变量,注意区分win64和win32的MatlaB 变量设置,还有visual stdio的设置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AMESim-Matlab 的联合仿真设置1. 联合仿真的前期准备1.1. AMESim 与Matlab 的版本匹配问题AMESim 与Matlab 的联合仿真有两类接口:接口(将AMESim 模型导入到Simulink 中)接口(将Simulink 模型导入到AMESim 中)两种不同的接口,对应的AMESim-Matlab 联合仿真的软件兼容列表,分别如图 1 和 2 所示。
图中,"Probable"表示未经AMESim 官方测试,但仍然可以正常使用。
"Yes"表示经AMESim 官方测试,确定可以正常使用。
"No"表示该组合不能实现联合仿真。
如图 1 所示,"AMESim to Simulink" 接口对软件的版本要求较低,基本上AMESim Rev7(或者更高的版本)与Mablab R2007b (或者更高的版本)可以自由组合进行联合仿真。
如果想使用"Simulink to AMESim" 接口,建议安装AMESim Rev11 以上的版本,Malab 只要求R2007b 以上即可。
图 1 "AMESim to Simulink" 接口图 2 "Simulink to AMESim" 接口1.2. Microsoft Visual C++编译器(VC++)的版本选择?AMESim 支持的VC++版本分别如图1(32 位编译器),图2(64 位编译器)所示。
图 1 和图 2 中,"Probable","Yes","No"表示的意思同上。
经测试,AMESim Rev9 可以正常调用VS2010 版的VC++(32 位)。
另外,从图 1 中,可以看到,VC++ 6.0 不能支持AMESim Rev11 以上的版本。
建议安装英文版的VC++编译器,便于联合仿真出错时,查看编译信息,寻找问题所在。
中文版的VC++编译器,在联合仿真出错时,部分编译信息会显示为乱码。
1.3. AMESim、Matlab、VC++的安装顺序需要注意吗?建议的安装顺序为:先装VC++,Malab 和AMESim 的安装顺序任意,这样就能省去一些手动操作。
AMESim 调用VC++编译器,需要事先将VC++编译器里的文件vcvars32.bat (32 位操作系统)或vcvars64.bat(64 位操作系统)拷贝到AMESim 的安装目录。
如果先装VC++,后装AMESim,正常情况下,vcvars32.bat 文件会自动导入到AMESim 安装目录中。
1.4. AMESim、Matlab、VC++是否可以正常进行?针对AMESim、Matlab,安装并破解完毕后,运行自带的demo 文件,检验demo 文件能否正常运行。
编写一个小的 C 或C++程序(程序必须正确),在VC++环境下运行,检验其是否可以通过编译并正确执行。
绝大多数情况下,应该是没有问题的,但不排除软件安装不完整造成出错,最简单的解决办法:先卸载,后重装。
2. AMESim-Matlab 的联合仿真环境设置本节在32 位操作系统下,进行联合仿真环境设置,但设置方法同样适用于64 位操作系统。
AMESim,Matlab,VC++三者的软件版本与相应的安装目录如下所示。
⏹软件版本:AMESim:rev13Matlab:R2011aVC++:Visual Studio 2010(英文版)(简称VS2010)⏹安装目录:AMESim:D:\AMESim\v1300Matlab:D:\Program Files\MATLAB\R2011aVC++:D:\Program Files\Microsoft Visual Studio 10.02.1. AMESim 调用VC++⏹如果使用的是32 位系统⏹检查AMESim 的安装目录:D:\AMESim\v1300,查看有无文件vcvars32.bat。
⏹如果没有,以“管理员身份”将D:\Program Files\Microsoft Visual Studio 10.0\bin目录下的vcvars32.bat 文件,拷贝到AMESim 的安装目录:D:\AMESim\v1300。
⏹启动AMESim 后,将VC++设置为默认的编译器,操作步骤如下:Tools -> Options -> AMESim preferences -> Compilation menu,,Microsoft Visual C++ (32 位编译器)(64 位编译器)⏹如果使用的是64 位系统操作步骤与32 系统相同,唯一的不同之处是,将D:\Program Files\Microsoft Visual Studio 10.0\bin 目录下的vcvars64.bat 拷贝到AMESim 的安装目录:D:\AMESim\v1300。
2.2. 设置Matlab 环境变量联合仿真中,AMESim 需要调用Matlab ,因此需要设置Matlab 的环境变量(MATLAB),让AMESim 知道Matlab 的启动路径。
⏹检查系统是否己设置Matlab 环境变量――MATLAB(本节开头己提到)在windows 操作系统下启动命令行,并键入命令:echo %MATLAB%。
如果己存在环境变量(MATLAB),则会输出D:\Progra~1\MATLAB\R2011a(本文的安装目录),否则无输出。
⏹设置Matlab 环境变量(MATLAB)⏹老版本的AMESim 不能识别包含空格的路径名。
因此,在设置Matlab 的环境变量值时,针对Matlab 的安装路径名是否含有空格,有两种不同的处理方式,如下表所示。
该设置方式同样选用于高版本。
⏹具体操作方法1) 选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”;2) 在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”;3) 用户变量中添加MATLAB D:\Progra~1\MATLAB \R2011a4) 在系统变量中添加在Path 环境变量中加入(以分号与其它已经存在的变量值隔开)路径:⏹D:\Progra~1\MATLAB\R2011a\bin⏹D:\Progra~1\MATLAB\R2011a\bin\win32⏹检验Matlab 环境变量相关设置是否正确在AMESim 菜单栏下,依次选择:Tools →Start Matlab……。
正常启动Matlab,表示环境变量设置成功。
2.3. Matlab 调用VC++(win7系统用户需要注意)打开Matlab,在命令行界面下,输入命令:mex -setup, 并按下回车键(Enter),很多win7系统用户有的时候在输入mex -setup之后是找不到编译器的——解决方法:这时选择输入n,然后手动选择编译器.出现问题手动输入n这时根据需要选择合适的编译器。
例如[10] Microsoft Visual C++ 2008 SP1:输入数字10-选择y-选择y三步完成选择,Microsoft Visual C++编译器设置成功。
2.4. 在Matlab 中添加AMESim 相关路径AMESim 相关路径:⏹%AME%\lib⏹%AME%\interfaces\sl2ame⏹%AME%\scripting\matlab\amesim⏹%AME%\scripting\matlab\amesim\AMESimLib需要注意的事项:⏹前三条路径必须添加到Matlab 中去,最后一条路径(旧版本中可能没有)可以不添加。
⏹%AME% 表示AMESim 的安装路径,以AMESim Rev13 为例,%AME% 表示D:\AMESim\v1300。
在Matlab 下依次选择:File →set Path..进入路径设置对话框,重复选择“Add Foler",将上述路径添加到Matlab 中。
2.5. 联合仿真检验AMESim –Simulink 联合仿真demo 文件⏹AMESim Rev13Help →get Amesim demo →Platform →MILSILHILRealTime→milsil →AMESimSimulink →AMESimulinkCosimulation.pck⏹AMESim Rev9/Rev7Help →get AMEsim demo →Infrastructure →Interfaces →AMEsimSimulink→AMESimulinkCosimulation.ame将demo 文件复制到除系统盘(一般为C 盘)外的,英文命名的文件夹。
进入“参数模式”,将AMESim 模型转化为S function 供Simulink 调用。
检查系统是否可以正常编译。
进入“仿真模式”,启动Matlab(Tool →Start Matlab)在Matlab 中运行mdl 文件,验证联合仿真运行AMESimulinkCosimulation_r_2008a.mdl运行AMESimulinkCosimulation_.mdl3. 联合仿真中出现的问题及相应的解决方法3.1. AMESim 无法正常编译AMESim 安装目录不存在vcvars32.bat编译出错信息:如下图所示。
未设置VC++为默认的编译器编译出错信息:如下图所示。
关键信息:Can't open specification file "Gcc is not supported for the Simulink interface" 其中Gcc 为AMESim 自带的编译器。
解决办法:参照 2.1 节在Windows7 下,以兼容模式运行旧版本AMESim编译出错信息:如下图所示。
关键信息:fatal error C1074: 'IDB' is illegal extension for PDB file:3.2. 如何在windows 操作系统上实现多个AMESim 版本共存?将不同版本的AMESim 装好后,为了在以后的使用中,可以根据需要打开不同版本的AMESim,就要用到批处理文件。
批处理文件的模板位于AMESim 安装目录下的misc 文件夹中,批处理文件名为RunAMESimTemplate.bat,里面给出了使用提示。
批处理内容如下所示(根据需要修改红色部分):将方框内的文字复制到新建的txt文件(*.txt),首先将D:\AMESim\v1300改为AMESim 的实际安装目录,例如,AMESim 的实际安装目录为:C:\AMESim\v1000,则将D:\AMESim\v130 改为C:\AMESim\v1000。