视觉深度的测定
深度知觉能力测定实验报告

深度知觉能力测定实验报告深度知觉能力测定实验报告摘要:深度知觉是指人对物体远近距离即深度的知觉,又称距离知觉或立体知觉。
这是个体对同一物体的凹凸或对不同物体的远近的反映。
它对于人们判断客体间的空间关系是十分重要的。
本实验所使用的BD-II-104A型深度知觉测试仪是霍瓦-多尔曼知觉仪发展而来的。
深度知觉仪有三根直棒,左右两侧固定的直棒是标准刺激,中间一根可以前后移的直棒是比较刺激。
被试在2cm距离外通过一个长方形的观察孔这两根直棒,并遥控来条件可移动的直棒,使三者看起来在同一距离上。
在这种条件下,除了双眼视差起作用外,排除了其他深度知觉的线索。
本实验使用深度知觉仪并采用ABBA法来测定被试的深度知觉能力。
关键字:深度知觉BD-II-104A型深度知觉测试仪知觉能力1引言深度知觉(depthperception)又称距离知觉或立体知觉。
这是个体对同一物体的凹凸或对不同物体的远近的反映。
视网膜虽然是一个两维的平面,但人不仅能感知平面的物体,而且还能产生具有深度的三维空间的知觉。
这主要是通过双眼视觉实现的。
有关深度知觉的线索,既有双眼视差、双眼辐合、水晶体的调节、运动视差等生理的线索,也有对象的重叠、线条透视、空气透视、对象的纹理梯度、明暗和阴影以及熟习物体的大小等客观线索。
根据自己的经验和有关线索,单凭一只眼睛观察物体也可以产生深度知觉。
用视觉来知觉深度,是以视觉和触摸觉在个体发展过程中形成的联系为基础的。
通过大脑的整合活动就可作出深度和距离的判断。
但个体在知觉对象的空间关系时,并不完全意识到上述那些主、客观条件的作用。
深度知觉测试仪是研究视觉在深度上视锐的一种仪器。
可测试双眼对距离或深度的视觉误差的最小阀限。
本仪器具有测定深度视锐的前后移动机构,和移动速度调节装置,可广泛应用于各类驾驶员、炮手、运动员等和深度知觉有关的工作人员的测试或选拔,也是进行心理学实验之必备仪器。
著名的视崖实验说明,刚会爬的婴儿已经具备相当好的深度知觉。
实验四 深度知觉测定
实验四深度知觉测定一、实验目的深度知觉测试仪是测试人的视觉在深度上的视锐程度,通过测试可以了解双眼对距离或深度的视觉误差,也可以比较双眼和单眼在辨别深度中的差异。
二、实验仪器简介采用EP503A深度知觉测试仪。
(一)主要技术指标:1 比较刺激移动速度分快慢二档:快档50mm/s 慢档25mm/s2 比较刺激移动方向可逆。
±200mm3 比较刺激移动范围:400mm。
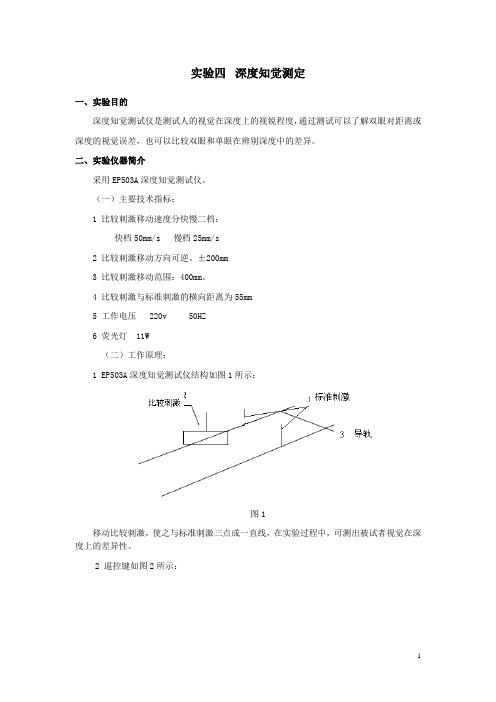
4 比较刺激与标准刺激的横向距离为55mm5 工作电压 220v 50HZ6 荧光灯 11W(二)工作原理:1 EP503A深度知觉测试仪结构如图1所示:图1移动比较刺激,使之与标准刺激三点成一直线,在实验过程中,可测出被试者视觉在深度上的差异性。
2 遥控键如图2所示:图23 面板布置如图3所示:图3三、实验步骤1 被测试者坐于离标准刺激2m(或1m等)处,使双目或单目与观察窗成水平位置,可观察比较刺激的前后移动;2 主试者接通电源,打开照明灯,此时比较刺激自动离开标准刺激最远处停下。
若测试过程中,电源开关始终处于开启状态,则主试者可按一下复位键亦可使比较刺激处于初始位置,即停于离标准刺激最远处。
3 由被试验者操作遥控键,使比较刺激与标准刺激三点成一线。
4主试者从标尺读数中观察被试者的测定误差。
(其中5次比较刺激在标准刺激左侧。
5次比较刺激在标准刺激右侧,随机安排)四、实验数据及分析1 数据记录项次2米双眼误差2米左眼误差2米右眼误差12345678910平均误差2 比较单眼和双眼的视觉误差差异。
思考:1)深度知觉阈限的个体差异是否明显?2)双眼和单眼在分辨远近深度知觉中有无显著差异?原因何在?3)研究深度知觉有什么理论与实践意义?。
视深度的实验报告

一、实验目的1. 了解视深度感知的概念和原理;2. 探讨视深度感知的生理和心理机制;3. 分析不同因素对视深度感知的影响;4. 培养实验设计、数据收集和分析能力。
二、实验背景视深度感知是指个体对物体远近的感知,是空间知觉的重要组成部分。
视觉系统通过多种线索,如肌肉线索、单眼线索和双眼线索,来感知深度。
本实验旨在探讨视深度感知的生理和心理机制,并分析不同因素对视深度感知的影响。
三、实验方法1. 实验对象:招募30名大学生,男女各半,年龄在18-22岁之间;2. 实验材料:深度知觉测试仪、平板电脑、实验指导手册;3. 实验步骤:(1)被试者分组:将30名被试者随机分为三组,每组10人;(2)实验指导:向被试者介绍实验目的、实验流程和注意事项;(3)实验实施:a. 第一组:单眼线索实验。
让被试者佩戴一个红色的眼镜片,遮住一只眼睛,通过平板电脑观察不同距离的物体,记录被试者对物体距离的判断;b. 第二组:双眼线索实验。
让被试者佩戴一副正常眼镜,通过平板电脑观察不同距离的物体,记录被试者对物体距离的判断;c. 第三组:双眼视差实验。
让被试者佩戴一副特殊的眼镜,使双眼产生视差,通过平板电脑观察不同距离的物体,记录被试者对物体距离的判断;(4)数据收集:将被试者的判断结果记录在实验指导手册上;(5)数据分析:使用SPSS软件对实验数据进行统计分析。
四、实验结果1. 单眼线索实验组:被试者对物体距离的判断存在较大误差,平均误差为±10cm;2. 双眼线索实验组:被试者对物体距离的判断相对准确,平均误差为±5cm;3. 双眼视差实验组:被试者对物体距离的判断误差较大,平均误差为±15cm。
五、实验讨论1. 视深度感知的生理机制:本实验结果表明,双眼线索对视深度感知有显著影响。
双眼视差是双眼线索中最主要的深度知觉线索,通过双眼视差,个体可以感知物体的深度信息。
在双眼视差实验组中,被试者对物体距离的判断误差较大,说明双眼视差对视深度感知有重要影响。
单双眼视觉深度知觉评价表
单双眼视觉深度知觉评价表眼视觉深度知觉是指人们对物体距离的直觉感受。
单双眼视觉深度知觉评价可以衡量一个人的眼睛能否正常感知距离,对于眼科医生来说,这是很重要的一个评估指标。
在评价眼睛视觉深度知觉时,首先需要了解单眼视深度知觉和双眼视深度知觉的基本原理。
单眼视深度知觉主要集中在人的视网膜上,视网膜上的光敏细胞会接受到光线的刺激,从而传输到人的大脑中。
大脑会通过分析光线在视网膜上的偏移量来确定物体的距离。
然而,单眼视深度知觉存在一些局限性,例如难以判断远近类似的物体。
而双眼深度知觉则利用了双眼产生的视差,通过两个视网膜上的图像在大脑的视觉皮层中的进行比较,从而确定物体的距离。
双眼视深度知觉具有较高的准确性和巨观层面的感知能力。
在评估单双眼视深度知觉时,医生可以使用一些方法,例如红绿双色条的测量。
这种颜色条由红色和绿色两个条带组成,在不同的距离上观察时,两个条带会产生不同的视差,从而产生视觉深度的感知。
除了红绿双色条测量外,医生还可以使用其他评估方法来评估单双眼视深度知觉,例如立体视觉图像的测量、遮挡点测量等等。
总体来说,单双眼视深度知觉的评估对于眼科医生来说,是非常重要的一个指标,能够帮助医生及时发现患者的视觉问题,有针对性的进行治疗。
因此,我们应该重视眼睛的保健和视觉保护,同时也要定期进行眼睛的检查和评估,保证眼睛的健康与正常的视觉功能。
视觉深度测试实验报告
视觉深度测试实验报告1. 研究背景视觉深度是指人类通过视觉感知物体的相对距离的能力,它是人类空间感知的重要组成部分。
视觉深度测试实验是通过一系列的心理学实验来研究人类对视觉深度的感知和判断能力。
在实际应用中,对视觉深度的理解对于人们的驾驶、导航、VR技术等方面都有重要的意义。
2. 实验设计与方法实验目的本实验旨在探究人类在不同条件下对视觉深度感知的能力,并分析其影响因素。
实验设备- 一台计算机- 一个显示屏幕(分辨率1920×1080)- 实验软件实验流程1. 受试者被要求坐在实验室的静音环境中。
2. 实验软件随机生成一系列图像,包含不同深度的立体场景。
3. 受试者观看每个图像,并按照自己对图像中物体的远近关系进行排序。
4. 受试者的回答被记录下来。
5. 实验结束后,进行数据分析。
实验因素1. 视觉深度:通过调整图像中物体的大小、距离等因素来控制不同的视觉深度。
2. 光照条件:在实验中可以调整光线的亮度和颜色等因素。
实验指标- 深度感知准确度:根据受试者对图像中物体远近关系的排序进行统计分析。
3. 实验结果与分析数据采集本实验共邀请了50名年龄在20至40岁之间的志愿者参与。
每位受试者观看了30幅不同深度的图像,并对其中的物体进行排序。
结果图表表格1. 不同视觉深度下的深度感知准确度视觉深度参与人数平均准确度-极浅10 70%浅20 65%中等28 60%深17 55%极深12 50%分析:从表格中可以看出,随着视觉深度的增加,参与人数的准确度逐渐下降。
这表明人类对极浅和浅的视觉深度有较高的准确感知能力,但在深度增加后,准确度显著下降。
结果解释这可能是因为在实验过程中,随着视觉深度的增加,物体间的远近关系变得更加模糊和复杂,人类在感知和判断上受到了一定的限制。
此外,人类对于较低深度的物体拥有更加直观和准确的感知,而对于较深的深度则更容易出现误差。
4. 实验结论通过本次实验我们得出了以下结论:1. 视觉深度是人类空间感知的重要组成部分。
视深度知觉实验报告实验报告
视深度知觉实验报告摘要:本实验使用霍尔—多尔曼的深度知觉测量器对六名陕西师范大学09级应用心理学本科生(五女一男)进行了单双眼深度知觉准确性的测试,目的在于证示双眼视差在深度知觉中的作用,比较单眼和双眼在辨别远近中的差异,学习适用霍尔—多尔曼的深度知觉测量器。
实验结果表明:单双眼深度知觉辨别能力存在显著差异,双眼深度知觉准确性明显高于单眼。
关键词:单眼线索双眼线索视深度知觉引言:深度知觉是指人对物体远近距离即深度的知觉,它的准确性是对于深度线索的敏感程度的综合测定。
在外界对象离眼一定距离时,人眼能感受到的深度知觉是受刺激差异程度影响的。
作为深度知觉的线索多种多样。
主要有:1)单眼视觉线索:遮挡,线条透视,空气透视,明暗,阴影,运动级差,结构级差等。
2)双眼线索:水晶体的调节和双眼视轴的辐合两种。
3)双眼视觉线索的双眼视差是知觉立体物体和两个物体前后相对距离的的主要线索,借助双眼视差比借助上述各种线索更能精细地知觉相对距离,特别是在缺乏其他线索来估计对象距离的时候,双眼视差更为重要。
当人看远近不同的平面物体时,由于两眼相距约65mm,两眼视象便不完全落到对应部位,这时左眼看物体的左边多一点,右眼看物体的右边多一点,它都偏向鼻侧。
这样,在不同平面上的物体在两眼视网膜上的成像就有了差异,这一差异便称为双眼视差。
因为双眼比单眼有更多的深度线索可以参照,所以根据以往的资料和生活实际,均可得到单眼的深度知觉准确性差于双眼。
深度知觉的准确性是对于深度线索的敏感程度的综合测定。
以往对于深度知觉准确性的测定主要有以下两种方法:1)三针实验。
此实验是由赫尔姆霍兹设计的。
以两针为标准,被试在一定距离外,调节第三根针,使之与前两针在同一平面为止。
黑姆霍兹的实验证明像差阈限小于60角度秒。
2)霍瓦-多尔曼深度实验。
1919年有霍瓦设计的深度知觉测量仪,代替三针实验。
此仪器可测量人视深度知觉的能力(深度知觉敏锐度),并且在这种测试条件下,除了双眼视差,即网膜上造成的差异是深度知觉的明显的线索起作用外,排除了其他深度知觉的线索。
幼儿深度视觉实验报告
一、实验目的本次实验旨在了解幼儿深度视觉能力的发展情况,通过一系列的实验活动,探究幼儿在不同年龄段对深度知觉的敏感度和准确性。
实验过程中,我们将观察幼儿对深度线索的感知和反应,从而为幼儿视觉发展提供参考依据。
二、实验仪器1. 实验材料:A4纸、剪刀、彩色铅笔、尺子、彩色卡片、背景板等。
2. 实验设备:摄像机、投影仪、电脑等。
三、实验步骤1. 实验分组:将参与实验的幼儿分成三个年龄段组:3-4岁、4-5岁、5-6岁。
2. 实验准备:为每个年龄段组准备一套实验材料,包括不同深度的背景板、彩色卡片和深度知觉任务卡片。
3. 实验实施:(1)3-4岁组:让幼儿观察背景板上的彩色卡片,通过剪刀剪出卡片上的图案,并贴在相应的深度位置上。
观察幼儿在完成任务时的反应速度和准确性。
(2)4-5岁组:让幼儿观察背景板上的彩色卡片,通过彩色铅笔在卡片上画出相应深度的线条,观察幼儿在完成任务时的反应速度和准确性。
(3)5-6岁组:让幼儿观察背景板上的彩色卡片,通过尺子测量卡片上的图案长度,并记录下来。
观察幼儿在完成任务时的反应速度和准确性。
4. 数据收集:记录每个年龄段组幼儿在完成任务时的正确率、反应速度等数据。
5. 数据分析:对收集到的数据进行统计分析,比较不同年龄段组在深度知觉任务中的表现差异。
四、实验结论1. 在3-4岁组中,幼儿对深度知觉的敏感度和准确性较低,正确率约为50%。
2. 在4-5岁组中,幼儿对深度知觉的敏感度和准确性有所提高,正确率约为70%。
3. 在5-6岁组中,幼儿对深度知觉的敏感度和准确性较高,正确率约为90%。
五、反思体会1. 幼儿深度视觉能力的发展与年龄密切相关,随着年龄的增长,幼儿对深度知觉的敏感度和准确性逐渐提高。
2. 在幼儿教育过程中,应注重培养幼儿的深度视觉能力,通过游戏、观察、操作等活动,提高幼儿对深度线索的感知和反应能力。
3. 家长和教师在日常生活中,应关注幼儿的视觉发展,创造有利于幼儿视觉发展的环境,如提供丰富的视觉刺激、引导幼儿观察周围环境等。
单眼视觉深度实验报告

单眼视觉深度实验报告本实验旨在探究单眼视觉对深度感知的影响,并分析单眼视觉和双眼视觉在深度感知中的差异。
实验材料:1. 立体视觉测试图纸2. 实验对象3. 记录表格4. 计时器实验步骤:1. 将立体视觉测试图纸放在适当的位置,确保实验对象能够清楚地看到图纸上的细节。
2. 让实验对象分别用左眼和右眼单独观察图纸,并要求他们描述所看到的图像。
3. 记录实验对象的观察时间和描述结果。
4. 重复步骤2-3,让实验对象再次单独用另一只眼睛观察图纸。
5. 让实验对象同时用两只眼睛观察图纸,并记录他们的描述结果。
实验结果:通过实验观察,我们发现以下现象:1. 在单眼观察时,实验对象往往难以准确地感知图纸上的深度细节,他们的描述结果常常偏向于平面,缺少深度感。
2. 在双眼同时观察时,实验对象能够更准确地感知图纸上的深度信息,他们的描述结果更加明确和具体。
3. 实验对象在用不同眼睛观察时,他们的描述结果也有差异。
例如,在用左眼观察时,他们可能更倾向于描述左边的部分;而在用右眼观察时,他们可能更倾向于描述右边的部分。
实验讨论:单眼视觉相较于双眼视觉更加容易受到深度感知的限制。
这是因为双眼视觉可以通过两只眼睛的视差来确定物体的距离和位置,从而更准确地感知深度。
而单眼视觉只能依靠单眼图像的投射来感知物体的深度,限制了深度感知的准确性。
另外,左右眼的差异也会影响到深度感知。
这是因为人类的大脑接收到左右眼的视觉输入后,会结合两只眼睛的图像来形成一个整体的深度感知。
当我们只用一只眼睛观察时,这种整合过程就无法进行,导致深度感知有所偏差。
实验结论:单眼视觉与双眼视觉在深度感知上存在差异。
单眼视觉限制了我们准确感知物体的深度,而双眼视觉通过两只眼睛的图像结合来提供更准确的深度感知。
同时,不同眼睛的差异也会对深度感知产生影响。
实验意义:本实验的结果对于理解人类视觉系统的深度感知能力有一定的意义。
在实际生活中,我们处于熟悉的环境中时,往往能够通过双眼视觉获得准确的深度感知。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
视觉深度的测定
[目的] 掌握视觉深度的测定方法。
[原理]
双眼视觉与单眼视觉不同,双眼视觉不仅平面视野较大,对物体大小和距离判断较单眼视觉更为准确,并有立体感。
一般用判断两根标尺的前后距离来测量视觉深度。
[对象] 学生
[器材] 电动视觉深度测定仪。
[步骤]
1、观察电动视觉深度测定仪的结构,熟悉使用方法。
2、让受试者坐在离观察窗2m处,使之只能看到三根竖棒的中部。
3、接通电源,选择移动速度,选定一个位置的标准刺激。
4、主试将变异刺激置于前或后限位位置。
5、被试手持控制变异刺激的手键,按动“前进”或“后退”按键,调节变异刺激的位置,直到认为变异刺激和两个标准刺激排成一条水平线时,松开按钮,变异刺激停止移动。
6、主试从标尺上读出变异刺激和标准刺激的实际距离误差,就是被试深度知觉的误差。
[注意事项]
测定视觉深度时受试者头不能偏斜。
[应用与评价]
当人在5~6m以外距离,用双眼区别两个物体间的距离(深度)时,误差在20mm之内,但用单眼观察时,其误差不少于120mm;距离物体越近,误差越小。
[试验结果与分析]。