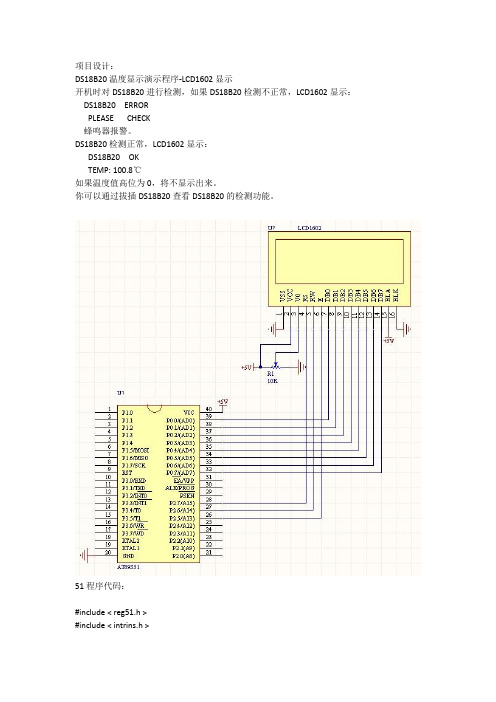
DS18B20温度采集+1602显示
51单片机DS18B20测温1602a显示
/*******************************************************************/
void beep()
{
unsigned char y ;
for (y=0 ;y<100 ;y++)
{
Delay(60) ;
BEEP=!BEEP ; //BEEP取反
void lcd_wdat(uchar dat)
{
while(lcd_busy()) ;
LCD_RS = 1 ;
LCD_RW = 0 ;
LCD_EN = 0 ;
P0 = dat ;
delayNOP() ;
LCD_EN = 1 ;
delayNOP() ;
LCD_EN = 0 ;
}
/* LCD初始化设定*/
}
/*******************************************************************/
/*写显示数据到LCD */
/*RS=H,RW=L,E=高脉冲,D0-D7=数据。*/
/*******************************************************************/
Disp_Temperature()
{
display[4]=temp_data[0]&0x0f ;
display[0]=ditab[display[4]]+0x30 ; //查表得小数位的值
display[4]=((temp_data[0]&0xf0)>>4)|((temp_data[1]&0x0f)<<4) ;
读取DS18B20温度,通过LCD1602显示出来,并输出控制
读取DS18B20温度,通过LCD1602显示出来,并输出控制电路原理图程序1.main.c#include #include"lcd.h"#include"temp.h" void LcdDisplay(int); sbit K1=P2^0;sbit K2=P2^1;sbit K3=P2^2;sbit K4=P2^3; extern int th=20; extern int tl=-10; sbit beep=P1^0;void main(){LcdInit(); LcdWriteCom(0xc7); LcdWriteData('C'); while(1){if(K1==0){Delay1ms(500);if(K1==0);th++;}if(K2==0){Delay1ms(500);if(K2==0);th--;}if(K3==0){Delay1ms(500);if(K3==0);tl++;}if(K4==0){Delay1ms(500);if(K4==0);tl--;}LcdDisplay(Ds18b20ReadTemp());}}void LcdDisplay(int temp){int i,tt,rr,mm;unsigned char datas[] = {0, 0, 0, 0},datas1[] = {0, 0, 0},datas2[] = {0, 0, 0};float tp;if(temp< 0){LcdWriteCom(0xc0);LcdWriteData('-');i=1;temp=temp-1;temp=~temp;tp=temp;temp=tp*0.0625*10+0.5;mm=-temp;}else{LcdWriteCom(0xc0);LcdWriteData('+');tp=temp;temp=tp*0.0625*10+0.5;mm=temp;}datas[0] = temp / 1000; datas[1] = temp % 1000 / 100; datas[2] = temp % 100 / 10; datas[3] = temp% 10;if(th < 0){LcdWriteCom(0x89);LcdWriteData('-');tt=-th;}else{LcdWriteCom(0x89);LcdWriteData('+');tt=th;}datas1[0] = tt / 100;datas1[1] = tt% 100 / 10; datas1[2] = tt % 10; LcdWriteCom(0x87); LcdWriteData('H'); LcdWriteCom(0x88); LcdWriteData(':'); LcdWriteCom(0x8a); LcdWriteData('0'+datas1[0]); LcdWriteCom(0x8b); LcdWriteData('0'+datas1[1]); LcdWriteCom(0x8c); LcdWriteData('0'+datas1[2]);if(tl < 0){LcdWriteCom(0x90);LcdWriteData('-');rr=-tl;}else{LcdWriteCom(0x90);LcdWriteData('+');rr=tl;}datas2[0] = rr / 100;datas2[1] = rr% 100 / 10; datas2[2] = rr % 10; LcdWriteCom(0x8e); LcdWriteData('L'); LcdWriteCom(0x8f); LcdWriteData(':'); LcdWriteCom(0x91); LcdWriteData('0'+datas2[0]); LcdWriteCom(0x92);LcdWriteData('0'+datas2[1]); LcdWriteCom(0x93); LcdWriteData('0'+datas2[2]);if(mm>=(th*10)||mm<=(tl*10)||th<=tl) beep=0;elsebeep=1;LcdWriteCom(0x80); LcdWriteData('T');LcdWriteCom(0x81); LcdWriteData('A');LcdWriteCom(0x82); LcdWriteData('I');LcdWriteData(' ');LcdWriteCom(0x84); LcdWriteData('A');LcdWriteCom(0x85); LcdWriteData('N');LcdWriteCom(0xc1); LcdWriteData('0'+datas[0]); LcdWriteCom(0xc2); LcdWriteData('0'+datas[1]);LcdWriteCom(0xc3);LcdWriteData('0'+datas[2]);LcdWriteCom(0xc4);LcdWriteData('.');LcdWriteCom(0xc5);LcdWriteData('0'+datas[3]);LcdWriteCom(0xc6);LcdWriteData('"');}2.lcd.h#ifndef __LCD_H_/********************************** 当使用的是4位数据传输的时候定义,使用8位取消这个定义**********************************/ #define LCD1602_4PINS /********************************** 包含头文件#include//---重定义关键词---//#ifndef uchar#define uchar unsigned char#endif#ifndef uint#define uint unsigned int#endif/********************************** PIN口定义**********************************/ #define LCD1602_DATAPINS P0sbit LCD1602_E=P2^7;sbit LCD1602_RW=P2^5;sbit LCD1602_RS=P2^6;/********************************** 函数声明/*在51单片机12MHZ时钟下的延时函数*/ void Lcd1602_Delay1ms(uint c); //误差0us /*LCD1602写入8位命令子函数*/void LcdWriteCom(uchar com);/*LCD1602写入8位数据子函数*/void LcdWriteData(uchar dat) ;/*LCD1602初始化子程序*/void LcdInit();#endif3.temp.h#define __TEMP_H_#includesbit DSPORT=P3^7;void Delay1ms(unsigned int );unsigned char Ds18b20Init();void Ds18b20WriteByte(unsigned char com); unsigned char Ds18b20ReadByte();void Ds18b20ChangTemp();void Ds18b20ReadTempCom();int Ds18b20ReadT emp();#endif4.lcd.c#include"lcd.h"void Lcd1602_Delay1ms(uint c) //延时{uchar a,b;for (; c>0; c--){for (b=19;b>0;b--){for(a=1;a>0;a--);}}}#ifndef LCD1602_4PINS //当没有定义这个LCD1602_4PINS时void LcdWriteCom(uchar com) //写入一个字节命令{LCD1602_E = 0;LCD1602_RS = 0;LCD1602_RW = 0;LCD1602_DATAPINS = com;Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;}#elsevoid LcdWriteCom(uchar com){LCD1602_E = 0;LCD1602_RW = 0;LCD1602_DATAPINS = com; //由于4位的接线是接到P0口的高四位,所以传送高四位不用改Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;LCD1602_DATAPINS = com << 4; //发送低四位Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;}#endif#ifndef LCD1602_4PINSvoid LcdWriteData(uchar dat) //写入一个字节数据{LCD1602_E = 0;LCD1602_RS = 1;LCD1602_DATAPINS = dat;Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;}#elsevoid LcdWriteData(uchar dat){LCD1602_E = 0;LCD1602_RS = 1;LCD1602_RW = 0;LCD1602_DATAPINS = dat; //由于4位的接线是接到P0口的高四位,所以传送高四位不用改Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5);LCD1602_E = 0;LCD1602_DATAPINS = dat << 4; //写入低四位Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5);LCD1602_E = 0;}#endif#ifndef LCD1602_4PINSvoid LcdInit() //LCD初始化子程序{LcdWriteCom(0x38);LcdWriteCom(0x0c);LcdWriteCom(0x06);LcdWriteCom(0x01);LcdWriteCom(0x80);}#elsevoid LcdInit(){LcdWriteCom(0x32); LcdWriteCom(0x28); LcdWriteCom(0x0c); LcdWriteCom(0x06); LcdWriteCom(0x01); LcdWriteCom(0x80);}#endif5.temp.c#include"temp.h"void Delay1ms(unsigned int y) //延时{ unsigned int x;for(y;y>0;y--)for(x=110;x>0;x--);}unsigned char Ds18b20Init() //初始化{ unsigned int i;DSPORT=0;i=70;while(i--);DSPORT=1;i=0;while(DSPORT){i++;if(i>5000)return 0;//失败}return 1;//成功}void Ds18b20WriteByte(unsigned char dat) //写字节{unsigned int i,j;for(j=0;j<8;j++){DSPORT=0; //每写入一位数据之前先把总线拉低1us (数据手册上模糊)i++;DSPORT=dat&0x01;i=6;while(i--);DSPORT=1;dat>>=1;}}unsigned char Ds18b20ReadByte(){unsigned char byte,bi;unsigned int i,j;for(j=8;j>0;j--){DSPORT=0;i++;DSPORT=1;i++;i++;bi=DSPORT;byte=(byte>>1)|(bi<<7);i=4;while(i--);}return byte;}void Ds18b20ChangTemp() //温度转换{Ds18b20Init();Delay1ms(1);Ds18b20WriteByte(0xcc);Ds18b20WriteByte(0x44);}void Ds18b20ReadTempCom() //读取温度命令{ Ds18b20Init();Delay1ms(1);Ds18b20WriteByte(0xcc);Ds18b20WriteByte(0xbe);}int Ds18b20ReadT emp() //读取温度{int temp=0;unsigned char tmh,tml;Ds18b20ChangT emp();Ds18b20ReadTempCom();tml=Ds18b20ReadByte();tmh=Ds18b20ReadByte();temp=tmh;temp<<=8;temp|=tml;。
DS18b20传感器利用1602显示温度电路图

DS18b20传感器利用1602显示温度电路图(附代码)*重要注:图中没有画出单片机最小系统,另外在实际焊接中1602 的1,2,3,15,16引脚要按下图焊接,其他引脚看上图,另外要加排阻;其次ds18b20焊接时要注意引脚,不要焊反。
下面说明书中给出的是bottom view,分清引脚后18b20直接按上图焊即可。
Ds18b20说明书:代码:#include<reg52.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intsbit ds=P2^2;sbit rs=P3^5;sbit wr=P3^6;sbit lcden=P3^4;uint temp;bit flag;uchar code table1[]="temperature is:"; void delay(uchar x)//延时函数_ms{uchar a,b;for(a=x;a>0;a--)for(b=120;b>0;b--);}/* 18b20 */void delayus(uint t)//延时函数_us{while(t--);}void z_reset()//单总线复位{ds=1;delayus(5);ds=0;delayus(80);ds=1;delayus(14);if(ds==0)flag=1;elseflag=0;delayus(20);}bit z_bit_read()//总线读一位{bit dat;ds=0;_nop_();_nop_();ds=1;_nop_();dat=ds;delayus(10);return dat;}uchar ds_read_byte()//18b20读一字节{uchar i,k,j;for(i=0;i<8;i++){j=z_bit_read();k=(k>>1)|(j<<7);}return k;}void ds_write_byte(uchar dat)//18b20写一字节{uchar i;for(i=0;i<8;i++){ds=0;_nop_();ds=dat&0x01;delayus(6);ds=1;dat=dat>>1;}delayus(6);}uint ds_read_temperature()//从18b20读温度{uchar a,b;z_reset();ds_write_byte(0xcc);ds_write_byte(0xbe);a=ds_read_byte();b=ds_read_byte();temp=b;temp=temp<<8;temp=temp|a;temp=temp*0.0625*10;return temp;}/* 1602 */void write_com(uchar com)//1602写命令{rs=0;wr=0;lcden=0;P0=com;lcden=1;delay(5);lcden=0;}void write_data(uchar dat)//1602写数据{rs=1;wr=0;lcden=0;P0=dat;lcden=1;delay(5);lcden=0;}void init()//1602初始化{write_com(0x38);write_com(0x08);write_com(0x01);write_com(0x06);write_com(0x0f);}main(){uint c,num;uchar i,j,k,z;P0=0;init();for(num=0;num<15;num++) //1602静态显示第一行{write_data(table1[num]);delay(300);}while(1){z_reset();ds_write_byte(0xcc);ds_write_byte(0x44);c=ds_read_temperature(); //读到温度write_com(0x80+0x40); //从第二行写i=c/100;//得十位j=c/10-c/100*10;//得各位k=c%10;//得十分位z='.';write_data(0x30+i);//1602显示数字只能输入ASCII码write_data(0x30+j);write_data(z);write_data(0x30+k);delay(300);}}。
DS18B20温度传感器 1602液晶显示

单片机轻松入门之十DS18B20温度传感器+1602液晶显示本文旨在介绍单片机入门的基础知识,为初接触或即将接触单片的新手提供一个入门指导。
本文章会陆续推出,隔几天一个章节。
所使用单片机为ATMEL公司的AT89C52,软件为PROTEUS和KEIL;只提供原理图和KEIL环境下的注释,希望对广大即将接触单片机的人有所帮助,如果有错误欢迎回帖指出与本人交流或QQ 联系(QQ:56)。
DS18B20数字温度传感器是由美国DALLAS公司生产的,体积小,使用方便,测温范围-55℃~+125℃,测温分辨率0.5℃,工作电压DC3-5V,不需要任何外围元件,采用SPI单线接口方式,在与微处理器连接时仅需要一条口线即可实现双向通讯,广泛适用于各种温度控制领域。
原理图如下:程序如下:#include<reg52.h>#define uchar unsigned char#define uint unsigned intsbit RS=P3^0;sbit EN=P3^2;sbit RW=P3^1;sbit wela=P3^3;sbit DQ=P3^4;uchar i;uint num;uint shi,ge,xiaoshu;uchar code t0[]="The temperature ";uchar code t1[]=" is ";uchar code wendu[]="09";void delay(uint x){uint m,n;for(m=x;m>0;m--)for(n=10;n>0;n--);}void delay1(uint x){uint a,b;for(a=x;a>0;a--)for(b=110;b>0;b--);}/*****************液晶写指令***************/void write_com(uchar com){wela=1;P2=com;wela=0;RS=0;EN=0;RW=0;delay(10);EN=1;delay(10);EN=0;}/*****************液晶写数据指令***************/void write_date(uchar date){wela=1;P2=date;wela=0;RS=1;EN=0;RW=0;delay(10);EN=1;delay(10);EN=0;}/*****************液晶初始化指令***************/void init(){write_com(0x38);delay(20);write_com(0x0f);delay(20);write_com(0x06);delay(20);write_com(0x80);for(i=0;i<16;i++){write_date(t0[i]);delay(0);}write_com(0x80+0x40);for(i=0;i<16;i++){write_date(t1[i]);delay(0);}}/*************DS18B20温度读取模块*************/void tmpDelay(int u) //延时函数{while(u--) ;}void Init_DS18B20() //初始化ds1820{unsigned char x=0;DQ = 1; //DQ复位tmpDelay(8); //稍做延时DQ = 0; //单片机将DQ拉低tmpDelay(80); //精确延时大于 480usDQ = 1; //拉高总线tmpDelay(14);x=DQ; //稍做延时后,如果x=0则初始化成功 x=1则初始化失败tmpDelay(20);}unsigned char ReadOneChar() //读一个字节{unsigned char i=0;unsigned char dat = 0;for (i=8;i>0;i--){DQ = 0; // 给脉冲信号dat>>=1;DQ = 1; // 给脉冲信号if(DQ)dat|=0x80;tmpDelay(4);}return(dat);}void WriteOneChar(unsigned char dat) //写一个字节{unsigned char i=0;for (i=8; i>0; i--){DQ = 0;DQ = dat&0x01;tmpDelay(5);DQ = 1;dat>>=1;}}unsigned int Readtemp() //读取温度{unsigned char a=0;unsigned char b=0;unsigned int t=0;float tt=0;Init_DS18B20();WriteOneChar(0xCC); // 跳过读序号列号的操作WriteOneChar(0x44); // 启动温度转换Init_DS18B20();WriteOneChar(0xCC); //跳过读序号列号的操作WriteOneChar(0xBE); //读取温度寄存器a=ReadOneChar(); //连续读两个字节数据b=ReadOneChar();t=b;t<<=8;t=t|a; //两字节合成一个整型变量tt=t*0.0625; //得到真实十进制温度值,因为DS18B20可以精确到0.0625度,所以读回数据的最低位代表的是0.0625度t= tt*10+0.5; //放大十倍,这样做的目的将小数点后第一位也转换为可显示数字,同时进行一个四舍五入操作。
DS18b20测温 1602显示

/***********************************************程序名称:DS18b20温度显示编写:wdc日期:2010-4-27简要说明:使用DS18b20A/D转化器,P3^7接数据I/O口DQ,P2^0-P2^7接1602的D0-D7,P3^0接rs,P3^1接r/w,P3^2接en 函数列表:void delay(int a);延时,以us计算void delayms(int z); 延时,以ms计算unsigned char reset(void) 复位程序unsigned char read_bit(void) 从DS18b20读一个位unsigned char read_byte(void) 从DS18b20读一个字节void write_bit(char bitval) 向DS18b20写一个位void write_byte(char val) 向DS18b20写指令一个字节void tmconvert(void) 温度转化int gettm(void) 读取温度修改记录:增加1602显示:void display(long m)定时器0中断:void timer0() interrupt 1***********************************************/#include <reg51.h>#define uchar8 unsigned char#define uint16 unsigned intuchar8 dis[6] = { 0, 0, 0, 0, 0, 0 };uchar8 code wendu[]={0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39}; //0到9的代码uchar8 code name[]={"by:wdc 2010-5-1"};uchar8 flag,sig; //flag用于判定是否有中断,sig判定温度符号sbit rs = P3^0; //1602 数据/命令sbit rw = P3^1; // 读/写sbit en = P3^2; // 使能端sbit DQ = P3^7; //18b20与单片机连接的DQ总线/*延时函数*/void delay (int us) //DELAY-11.0592MHZ 调用程序大约为24us,每次循环为16us {int s;for(s=0;s<us;s++);}void delayms(int z) //z为毫秒数{int x,y;for(x=z;x>0;x--)for(y=125;y>0;y--);}/**********************函数名称:写指令输入参数:指令输出参数:数据口输出指令功能:对1602执行特定命令***********************/void write_com(uchar8 com) //写指令{delayms(5);rs = 0; //选择写指令rw = 0;P2 = com;en = 1; //en先1后0为高脉冲delayms(5);en = 0;}/**********************函数名称:写数据输入参数:数据,字母则是ASCIL值输出参数:数据口输出数据功能:令1602显示数据***********************/void write_dat(uchar8 dat) //写数据{delayms(5);rs = 1; //选择写数据rw = 0;P2 = dat;en = 1; //en先1后0为高脉冲delayms(5);en = 0;}/**********************函数名称:初始化输入参数:无输出参数:无调用函数:void w_cmd(uchar cmd)功能:对1602进行初始化,具体过程应严格参照产品说明书***********************/void init(viod) //初始化{TMOD=0x01; //定时器0设为工作方式1TH0 =0x3c; //(65536-50000)/256;TL0 =0xb0; //(65536-50000)%256;EA=1; //开总中断ET0=1; //开定时器0中断TR0=1; //启动定时器0rw = 0; //读/写置低write_com(0x38); //设置16x2显示,5x7点阵,8位数据口write_com(0x08); //显示关闭write_com(0x01); //显示清屏,数据指针以及所有显示清零write_com(0x06); //读写数据,光标及数据指针加一write_com(0x0c); //开显示,光标不显示}/***************函数名称:写字符串输入参数:字符串首地址输出参数:无功能:使1602显示字符串****************/void write_char(uchar8 *cha) //字符串的输入{uchar8 i = 0;while (cha[i] != 0){write_dat(cha[i]); //写一个数据i++; //i自加一次delayms(50); //延时50ms}}/*复位程序*/unsigned char reset(void){uchar8 presence;DQ=0; //拉低总线。
基于msp430开发板的ds18b20温度测量程序+1602显示

基于msp430开发板的ds18b20温度测量程序+1602显示#include#include#define uchar unsigned char#define uint unsigned int#define DQ_1 P2OUT |= BIT3 //DS18B20数据脚接P2.3,LaunchPad上TXD、RXD跳线帽,由“‖”接改为“〓”。
用USB连接电脑后就可用超级终端看到温度了。
#define DQ_0 P2OUT &= ~BIT3#define DQ_in P2DIR &= ~BIT3#define DQ_out P2DIR |= BIT3#define DQ_val (P2IN & BIT3)#define Read_ROM 0x33 //读ROM#define Match_ROM 0x55 //匹配ROM#define Skip_ROM 0xcc //跳过ROM#define Search_ROM 0xf0 //搜索ROM#define Alarm_Search 0xec //告警搜索#define Convert_T emperature 0x44 //温度转换#define Read_Scratchpad 0xbe //读暂存存储器9字节内容#define Write_Scratchpad 0x4e //写暂存存储器,写的是TH and TL ,接着发送两位数据就可以unsigned int Check_val; //初始化检测变量unsigned int Temp;//温度整数值void UartPutchar(unsigned char c);unsigned char UartGetchar();unsigned int DS18b20_init(void){DQ_out;DQ_0;__delay_cycles(600);DQ_1;__delay_cycles(60);DQ_in;_NOP();if(DQ_val){Check_val = 0; //初始化失败}else{Check_val = 1; //初始化成功}__delay_cycles(10);DQ_out;DQ_1;__delay_cycles(100);return Check_val;}void DS18b20_write_byte(unsigned int dat) {unsigned int i;for(i = 0; i < 8;i++){DQ_0;__delay_cycles(2);if(dat & 0X01)DQ_1;elseDQ_0;__delay_cycles(60);dat >>= 1;;DQ_1;__delay_cycles(10);}}unsigned int DS18b20_read_byte(void) {unsigned i;unsigned int byte = 0;for(i = 0;i < 8;i++){byte >>= 1;DQ_0;__delay_cycles(2);DQ_1;__delay_cycles(2);DQ_in;_NOP();if(DQ_val)byte |= 0x80;__delay_cycles(60);DQ_out;DQ_1;__delay_cycles(10);}return byte;}unsigned int get_one_temperature(void) {unsigned int Temp_l;unsigned int Temp_h;unsigned int t;float tt;DS18b20_init();DS18b20_write_byte(Skip_ROM);DS18b20_write_byte(Convert_Temperature); __delay_cycles(1000000);DS18b20_init();DS18b20_write_byte(Skip_ROM);DS18b20_write_byte(Read_Scratchpad); Temp_l=DS18b20_read_byte();Temp_h=DS18b20_read_byte();t=Temp_h;t<<=8;t=t|Temp_l;tt=t*0.0625;t= tt*10+0.5; //放大10倍输出并四舍五入return(t);}#define DataDir P1DIR#define DataPort P1OUT#define Busy 0x80#define CtrlDir P2DIR#define CLR_RS P2OUT&=~BIT0; //RS = P3.0 #define SET_RS P2OUT|=BIT0;#define CLR_RW P2OUT&=~BIT1; //RW = P3.1 #define SET_RW P2OUT|=BIT1;#define CLR_EN P2OUT&=~BIT2; //EN = P3.2 #define SET_EN P2OUT|=BIT2;void DelayNus(unsigned int n){CCR0 = n;TACTL |= MC_1; //增计数到CCR0while(!(TACTL & BIT0)); //等待TACTL &= ~MC_1; //停止计数TACTL &= ~BIT0; //清除中断标志}void Delay5ms(void){//unsigned int i;//i=40000;//while (i != 0)// {// i--;// }DelayNus(5000);}void WaitForEnable(void)P1DIR &= 0x00; //将P1口切换为输入状态CLR_RS;SET_RW;_NOP();SET_EN;_NOP();_NOP();while((P1IN & Busy)!=0); //检测忙标志CLR_EN;P1DIR |= 0xFF; //将P4口切换为输出状态}void write_com(unsigned char cmd) {WaitForEnable(); // 检测忙信号?CLR_RS;CLR_RW;_NOP();DataPort =cmd ; //将命令字写入数据端口_NOP();SET_EN; //产生使能脉冲信号_NOP();_NOP();CLR_EN;}void write_data( unsigned int data )WaitForEnable(); //等待液晶不忙SET_RS;CLR_RW;_NOP();DataPort = data; //将显示数据写入数据端口_NOP();SET_EN; //产生使能脉冲信号_NOP();_NOP();CLR_EN;}void zifuchuan(unsigned int *ch){while(*ch!=0)write_data(*ch++);Delay5ms();}void LcdReset(void){CtrlDir |= 0x07; //控制线端口设为输出状态DataDir = 0xFF; //数据端口设为输出状态write_com(0x38); //显示模式设置write_com(0x0c); //显示开,不开游标,不闪烁write_com(0x06); //写字符时整体不移动write_com(0x01); //显示清屏__delay_cycles(200);}/************************************************************* * 名称:void dis_temp(uint t)* 功能:分出十位、个位等* 入口参数:t* 出口参数:无* 说明: 送到1602显示*************************************************************/ void main(void){unsigned int a,b,c,d;// BCSCTL1|=DIVA_0;WDTCTL=WDTPW+WDTHOLD;// WDTCTL = WDT_ADLY_1000; // Stop watchdog timer// IE1 |=WDTIE;P1DIR = 0XFF;P1OUT = 0XFF;P2DIR = 0XFF;P2OUT = 0XFF;BCSCTL2 = SELM_0 + DIVM_0 + DIVS_0; //dco不分频用作mclk,不分频默认用作smclkif (CALBC1_1MHZ != 0xFF){DCOCTL = 0x00;BCSCTL1 = CALBC1_1MHZ; /* Set DCO to 1MHz */DCOCTL = CALDCO_1MHZ;}BCSCTL1 |= XT2OFF + DIVA_0;LcdReset();while(1){a=get_one_temperature();b=a/100;c=(a%100)/10;d=a%10;P2SEL&=~BIT6;if(a>300){P2DIR|=BIT5;P2OUT|=BIT5;P2DIR|=BIT6;P2OUT|=BIT6;}else{P2DIR|=BIT5;P2OUT&=~BIT5;P2DIR|=BIT6;P2OUT&=~BIT6;}write_com(0x80+0x05);write_data(b+0x50);write_data(c+0x50);write_data(0x4e);write_data(d+0x50);write_data(0xbf); //显示温度的小圈write_data(0x23);//__delay_cycles();}}/*pragma vector=WDT_VECTOR__interrupt void watchdog_timer(void){_BIS_SR_IRQ(LPM3_bits); }*/。
DS18B20与LCD1602结合显示温度汇总
二、DS18B20存储器结构
DS18B20的内部有64位的ROM单元,和9字节的暂存器单元。
1、64位(激)光刻只读存储器
每只DS18B20都有一个唯一存储在ROM中的64位编码(跟人的身份证号类似,一人一个身份证号),这是出厂时被光刻好的。最前面8位是单线系列编码:28h。接着的48位是一个唯一的序列号。最后8位是以上56位的CRC编码。64-位的光刻ROM又包括5个ROM的功能命令:读ROM,匹配ROM,跳跃ROM,查找ROM和报警查找。ROM的作用是使每个DS18B20各不相同,这样就可以实现一根总线上挂接多个DS18B20以实现多点监测。
图3
表2
4)、CRC发生器
CRC字节作为DS18B2064位ROM的一部分存储在存储器中。CRC码由ROM的前56位计算得到,被包含在ROM的重要字节当中的数据发生改变时,CRC的值也随之改变。
CRC能够在总线控制器读取DS18B20时进行数据校验。为校验数据是否被正确读取,总线控制器必须用接受到的数据计算出一个CRC值,和存储在DS18B20的64位ROM中的值(读ROM时)或DS18B20内部计算出的8位CRC值(读存储器时)进行比较。如果计算得到的CRC值和读取出来的CRC值相吻合,数据被无错传输。CRC值的比较以及是否进行下一步操作完全由总线控制器决定。当在DS18B20中存储的或由其计算到CRC值和总线控制器计算的值不相符时,DS18B20内部并没有一个能阻止命令序列进行的电路。
2)、非挥发的温度报警触发器TH和TL
位于第2和第3字节,用于写入温度报警值,实际上就是设定温度的最高和最低界限。
读取DS18B20温度,通过LCD1602显示出来,并输出控制讲解
电路原理图程序1.main.c#include<reg51.h> #include"lcd.h"#include"temp.h" void LcdDisplay(int); sbit K1=P2^0;sbit K2=P2^1;sbit K3=P2^2;sbit K4=P2^3; extern int th=20; extern int tl=-10; sbit beep=P1^0;void main(){LcdInit();LcdWriteCom(0xc7);LcdWriteData('C');while(1){if(K1==0){Delay1ms(500);if(K1==0);th++;}if(K2==0){Delay1ms(500);if(K2==0);th--;}if(K3==0){Delay1ms(500);if(K3==0);tl++;}if(K4==0){Delay1ms(500);if(K4==0);tl--;}LcdDisplay(Ds18b20ReadTemp());}}void LcdDisplay(int temp){int i,tt,rr,mm;unsigned char datas[] = {0, 0, 0, 0},datas1[] = {0, 0, 0},datas2[] = {0, 0, 0};float tp;if(temp< 0){LcdWriteCom(0xc0);LcdWriteData('-');i=1;temp=temp-1;temp=~temp;tp=temp;temp=tp*0.0625*10+0.5;mm=-temp;}else{LcdWriteCom(0xc0);LcdWriteData('+');tp=temp;temp=tp*0.0625*10+0.5;mm=temp;}datas[0] = temp / 1000; datas[1] = temp % 1000 / 100; datas[2] = temp % 100 / 10; datas[3] = temp% 10;if(th < 0){LcdWriteCom(0x89);LcdWriteData('-');tt=-th;}else{LcdWriteCom(0x89);LcdWriteData('+');tt=th;}datas1[0] = tt / 100;datas1[1] = tt% 100 / 10; datas1[2] = tt % 10; LcdWriteCom(0x87); LcdWriteData('H'); LcdWriteCom(0x88); LcdWriteData(':'); LcdWriteCom(0x8a); LcdWriteData('0'+datas1[0]); LcdWriteCom(0x8b); LcdWriteData('0'+datas1[1]); LcdWriteCom(0x8c); LcdWriteData('0'+datas1[2]);if(tl < 0){LcdWriteCom(0x90);LcdWriteData('-');rr=-tl;}else{LcdWriteCom(0x90);LcdWriteData('+');rr=tl;}datas2[0] = rr / 100;datas2[1] = rr% 100 / 10; datas2[2] = rr % 10; LcdWriteCom(0x8e); LcdWriteData('L'); LcdWriteCom(0x8f); LcdWriteData(':'); LcdWriteCom(0x91); LcdWriteData('0'+datas2[0]); LcdWriteCom(0x92);LcdWriteData('0'+datas2[1]); LcdWriteCom(0x93); LcdWriteData('0'+datas2[2]);if(mm>=(th*10)||mm<=(tl*10)||th<=tl) beep=0;elsebeep=1;LcdWriteCom(0x80); LcdWriteData('T');LcdWriteCom(0x81); LcdWriteData('A');LcdWriteCom(0x82); LcdWriteData('I');LcdWriteData(' ');LcdWriteCom(0x84); LcdWriteData('A');LcdWriteCom(0x85); LcdWriteData('N');LcdWriteCom(0xc1); LcdWriteData('0'+datas[0]); LcdWriteCom(0xc2); LcdWriteData('0'+datas[1]);LcdWriteCom(0xc3);LcdWriteData('0'+datas[2]);LcdWriteCom(0xc4);LcdWriteData('.');LcdWriteCom(0xc5);LcdWriteData('0'+datas[3]);LcdWriteCom(0xc6);LcdWriteData('"');}2.lcd.h#ifndef __LCD_H_#define __LCD_H_/********************************** 当使用的是4位数据传输的时候定义,使用8位取消这个定义**********************************/ #define LCD1602_4PINS/********************************** 包含头文件#include<reg51.h>//---重定义关键词---//#ifndef uchar#define uchar unsigned char#endif#ifndef uint#define uint unsigned int#endif/********************************** PIN口定义**********************************/ #define LCD1602_DATAPINS P0sbit LCD1602_E=P2^7;sbit LCD1602_RW=P2^5;sbit LCD1602_RS=P2^6;/********************************** 函数声明/*在51单片机12MHZ时钟下的延时函数*/ void Lcd1602_Delay1ms(uint c); //误差0us /*LCD1602写入8位命令子函数*/void LcdWriteCom(uchar com);/*LCD1602写入8位数据子函数*/void LcdWriteData(uchar dat) ;/*LCD1602初始化子程序*/void LcdInit();#endif3.temp.h#ifndef __TEMP_H_#define __TEMP_H_#include<reg51.h>sbit DSPORT=P3^7;void Delay1ms(unsigned int );unsigned char Ds18b20Init();void Ds18b20WriteByte(unsigned char com); unsigned char Ds18b20ReadByte();void Ds18b20ChangTemp();void Ds18b20ReadTempCom();int Ds18b20ReadTemp();#endif4.lcd.c#include"lcd.h"void Lcd1602_Delay1ms(uint c) //延时{uchar a,b;for (; c>0; c--){for (b=19;b>0;b--){for(a=1;a>0;a--);}}}#ifndef LCD1602_4PINS //当没有定义这个LCD1602_4PINS时void LcdWriteCom(uchar com) //写入一个字节命令{LCD1602_E = 0;LCD1602_RS = 0;LCD1602_RW = 0;LCD1602_DATAPINS = com;Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;}#elsevoid LcdWriteCom(uchar com){LCD1602_E = 0;LCD1602_RW = 0;LCD1602_DATAPINS = com; //由于4位的接线是接到P0口的高四位,所以传送高四位不用改Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;LCD1602_DATAPINS = com << 4; //发送低四位Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;}#endif#ifndef LCD1602_4PINSvoid LcdWriteData(uchar dat) //写入一个字节数据{LCD1602_E = 0;LCD1602_RS = 1;LCD1602_DATAPINS = dat;Lcd1602_Delay1ms(1);LCD1602_E = 1;Lcd1602_Delay1ms(5);LCD1602_E = 0;}#elsevoid LcdWriteData(uchar dat){LCD1602_E = 0;LCD1602_RS = 1;LCD1602_RW = 0;LCD1602_DATAPINS = dat; //由于4位的接线是接到P0口的高四位,所以传送高四位不用改Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5);LCD1602_E = 0;LCD1602_DATAPINS = dat << 4; //写入低四位Lcd1602_Delay1ms(1);LCD1602_E = 1; //写入时序Lcd1602_Delay1ms(5);LCD1602_E = 0;}#endif#ifndef LCD1602_4PINSvoid LcdInit() //LCD初始化子程序{LcdWriteCom(0x38);LcdWriteCom(0x0c);LcdWriteCom(0x06);LcdWriteCom(0x01);LcdWriteCom(0x80);}#elsevoid LcdInit(){LcdWriteCom(0x32);LcdWriteCom(0x28);LcdWriteCom(0x0c);LcdWriteCom(0x06);LcdWriteCom(0x01);LcdWriteCom(0x80);}#endif5.temp.c#include"temp.h"void Delay1ms(unsigned int y) //延时{unsigned int x;for(y;y>0;y--)for(x=110;x>0;x--);}unsigned char Ds18b20Init() //初始化{unsigned int i;DSPORT=0;i=70;while(i--);DSPORT=1;i=0;while(DSPORT){i++;if(i>5000)return 0;//失败}return 1;//成功}void Ds18b20WriteByte(unsigned char dat) //写字节{unsigned int i,j;for(j=0;j<8;j++){DSPORT=0; //每写入一位数据之前先把总线拉低1us (数据手册上模糊)i++;DSPORT=dat&0x01;i=6;while(i--);DSPORT=1;dat>>=1;}}unsigned char Ds18b20ReadByte(){unsigned char byte,bi;unsigned int i,j;for(j=8;j>0;j--){DSPORT=0;i++;DSPORT=1;i++;i++;bi=DSPORT;byte=(byte>>1)|(bi<<7);i=4;while(i--);}return byte;}void Ds18b20ChangTemp() //温度转换{Ds18b20Init();Delay1ms(1);Ds18b20WriteByte(0xcc);Ds18b20WriteByte(0x44);}void Ds18b20ReadTempCom() //读取温度命令{Ds18b20Init();Delay1ms(1);Ds18b20WriteByte(0xcc);Ds18b20WriteByte(0xbe);}int Ds18b20ReadTemp() //读取温度{int temp=0;unsigned char tmh,tml;Ds18b20ChangTemp();Ds18b20ReadTempCom();tml=Ds18b20ReadByte();tmh=Ds18b20ReadByte();temp=tmh;temp<<=8;temp|=tml;return temp; }。
DS18B20温度计 c程序 lcd1602显示(word文档良心出品)
2007-12-14 19:05温度值精确到0.1度,lcd1602显示仿真电路图如下c程序如下:#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit DQ=P3^7;//ds18b20与单片机连接口sbit RS=P3^0;sbit RW=P3^1;sbit EN=P3^2;unsigned char code str1[]={"temperature: "};unsigned char code str2[]={" "};uchar data disdata[5];uint tvalue;//温度值uchar tflag;//温度正负标志/*************************lcd1602程序**************************/ void delay1ms(unsigned int ms)//延时1毫秒(不够精确的){unsigned int i,j;for(i=0;i<ms;i++)for(j=0;j<100;j++);}void wr_com(unsigned char com)//写指令//{ delay1ms(1);RS=0;RW=0;EN=0;P2=com;delay1ms(1);EN=1;delay1ms(1);EN=0;}void wr_dat(unsigned char dat)//写数据//{ delay1ms(1);;RS=1;RW=0;EN=0;P2=dat;delay1ms(1);EN=1;delay1ms(1);EN=0;}void lcd_init()//初始化设置//{delay1ms(15);wr_com(0x38);delay1ms(5);wr_com(0x08);delay1ms(5);wr_com(0x01);delay1ms(5);wr_com(0x06);delay1ms(5);wr_com(0x0c);delay1ms(5);}void display(unsigned char *p)//显示//{while(*p!='\0'){wr_dat(*p);p++;delay1ms(1);}}init_play()//初始化显示{ lcd_init();wr_com(0x80);display(str1);wr_com(0xc0);display(str2);}/******************************ds1820程序***************************************/ void delay_18B20(unsigned int i)//延时1微秒{while(i--);}void ds1820rst()/*ds1820复位*/{ unsigned char x=0;DQ = 1; //DQ复位delay_18B20(4); //延时DQ = 0; //DQ拉低delay_18B20(100); //精确延时大于480usDQ = 1; //拉高delay_18B20(40);}uchar ds1820rd()/*读数据*/{ unsigned char i=0;unsigned char dat = 0;for (i=8;i>0;i--){ DQ = 0; //给脉冲信号dat>>=1;DQ = 1; //给脉冲信号if(DQ)dat|=0x80;delay_18B20(10);}return(dat);}void ds1820wr(uchar wdata)/*写数据*/{unsigned char i=0;for (i=8; i>0; i--){ DQ = 0;DQ = wdata&0x01;delay_18B20(10);DQ = 1;wdata>>=1;}}read_temp()/*读取温度值并转换*/{uchar a,b;ds1820rst();ds1820wr(0xcc);//*跳过读序列号*/ds1820wr(0x44);//*启动温度转换*/ds1820rst();ds1820wr(0xcc);//*跳过读序列号*/ds1820wr(0xbe);//*读取温度*/a=ds1820rd();b=ds1820rd();tvalue=b;tvalue<<=8;tvalue=tvalue|a;if(tvalue<0x0fff)tflag=0;else{tvalue=~tvalue+1;tflag=1;}tvalue=tvalue*(0.625);//温度值扩大10倍,精确到1位小数return(tvalue);}/*******************************************************************/ void ds1820disp()//温度值显示{ uchar flagdat;disdata[0]=tvalue/1000+0x30;//百位数disdata[1]=tvalue%1000/100+0x30;//十位数disdata[2]=tvalue%100/10+0x30;//个位数disdata[3]=tvalue%10+0x30;//小数位if(tflag==0)flagdat=0x20;//正温度不显示符号elseflagdat=0x2d;//负温度显示负号:-if(disdata[0]==0x30){disdata[0]=0x20;//如果百位为0,不显示if(disdata[1]==0x30){disdata[1]=0x20;//如果百位为0,十位为0也不显示}}wr_com(0xc0);wr_dat(flagdat);//显示符号位wr_com(0xc1);wr_dat(disdata[0]);//显示百位wr_com(0xc2);wr_dat(disdata[1]);//显示十位wr_com(0xc3);wr_dat(disdata[2]);//显示个位wr_com(0xc4);wr_dat(0x2e);//显示小数点wr_com(0xc5);wr_dat(disdata[3]);//显示小数位}/********************主程序***********************************/void main(){ init_play();//初始化显示while(1){read_temp();//读取温度ds1820disp();//显示}}。
DS18B20与LCD1602结合显示温度汇总(可编辑修改word版)
单总线系统包括一个总线控制器和一个或多个从机。DS18B20 总是充当从机。当只有 一只从机挂在总线上时,系统被称为“单点”系统;如果由多只从机挂在总线上,系统被 称为“多点”。 所有的数据和指令的传递都是从最低有效位开始通过单总线。单总线需要 一个约 5KΩ 的外部上拉电阻;单总线的空闲状态是高电平。无论任何理由需要暂停某一 执行过程时,如果还想恢复执行的话,总线必须停留在空闲状态。在恢复期间,如果单总 线处于非活动(高电平)状态,位与位间的恢复时间可以无限长。如果总线停留在低电平 超过 480us,总线上的所有器件都将被复位。 四、操作流程 1.DS18B20 复位。 2.执行 ROM 指令。就是访问,搜索,匹配每个 DS18B20 独有的 64 位序列号。实验板上只 连有一个 DS18B20,故不需识别,也就是不需读出此序列号,写代码时直接写命令 0xcc 跳过。 3.执行 DS18B20 功能指令(RAM 指令,就是读写暂存器指令)。
一个身份证号),这是出厂时被光刻好的。最前面 8 位是单线系列编码:28h。接着的 48 位
是一个唯一的序列号。最后 8 位是以上 56 位的 CRC 编码。64-位的光刻 ROM 又包括 5 个
ROM 的功能命令:读 ROM,匹配 ROM,跳跃 ROM,查找 ROM 和报警查找。ROM 的作
用是使每个 DS18B20 各不相同,这样就8B20 一、DS18B20 的外形及其与单片机的连接图
(a)
(b)
图1
DS18B20 是 Dallas 公司生产的 1-Wire 接口数字温度传感器,其外形如图 1(a)所示,有
三个引脚,分别为:电源地 1(GND); 数字信号输入/输出端 2(DQ);外接供电电源输入端
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
/*************************************************************************************************************** 名称:DS18B20采集温度+1602LCD显示编写:超时间:2012-11-29内容:***************************************************************************************************************/ #include<reg52.h>#define uchar unsigned char#define uint unsigned intsbit DQ=P3^7; //ds18b20与单片机连接口sbit RS=P3^0; //1602写数据/写命令选择端口//RS=1写数据,即要显示的内容//RS=0写命令,即一些LCD设置命令sbit RW=P3^1; //1602读/写选择端,RW=0为写模式sbit EN=P3^2; //给EN一个高脉冲,将数据送入液晶控制器,完成写操作uchar code str1[]={"^_^ Zhang Chao"};uchar code str2[]={" T= "};uchar data disdata[5];//百、十、个、小数位uint tvalue; //温度值uchar tflag; //温度正负标志/*************************lcd1602设置子函数*******************************************************************/ void delay1ms(uint ms) //延时1毫秒子函数,形参为ms(不够精确的){unsigned int i,j;for(i=0;i<ms;i++)for(j=0;j<110;j++);}void wr_com(uchar com)//lcd写控制指令子函数,形参为com{delay1ms(1); //调用延时子函数,并用实参1代替延时子函数中的形参msRS=0; //RS=0进入写命令状态,即一些LCD设置命令RW=0; //RW=0为写模式EN=0; //EN=0时不能完成写操作P2=com; //把要设置的指令码com送给P2口delay1ms(1);EN=1; //给EN一个高脉冲,将数据送入液晶控制器,完成写操作delay1ms(1);EN=0; //EN=0时不能完成写操作}void wr_dat(uchar dat)//lcd写显示数据子函数,形参为dat{delay1ms(1);RS=1; //RS=1进入写数据状态,即要显示的内容RW=0; //RW=0为写模式EN=0; //EN=0时不能完成写操作P2=dat; //把要显示的数据dat送给P2口delay1ms(1);EN=1; //给EN一个高脉冲,将数据送入液晶控制器,完成写操作delay1ms(1);EN=0; //EN=0时不能完成写操作}void lcd_init() //lcd初始化设置子函数,不带参数,0x38是显示模式设置,其余是显示开/关及光标设置,无顺序{delay1ms(15);wr_com(0x38); //调用写控制指令子函数,并用实参"0011 1000"代替形参com//0x38表示设置为16*2显示,每个块为5*7点阵,8位数据接口delay1ms(5);wr_com(0x08); //调用写控制指令子函数,并用实参"0000 1000"代替形参com//0x08表示设置为关显示、不显示光标、光标不闪烁delay1ms(5);wr_com(0x01); //调用写控制指令子函数,并用实参"0000 0001"代替形参com//0x01表示显示数据清屏(数据指针清0,所有显示清0)delay1ms(5);wr_com(0x06);//调用写控制指令子函数,并用实参"0000 0110"代替形参com//0x06表示当读或写一个字符后地址指针加1,且光标加1;当写一个字符时,整屏显示不移动delay1ms(5);wr_com(0x0c);//调用写控制指令子函数,并用实参"0000 1100"代替形参com//0x0c打开显示、不显示光标、光标不闪烁delay1ms(5);}void display(uchar *p)//lcd显示字符串子函数{while(*p!='\0') //测试是否等于'\0',即判断是否结尾{wr_dat(*p); //显示指针所指的字符串p++; //指针加1delay1ms(1);}}init_play()//初始化显示子函数{lcd_init(); //调用lcd初始化设置子函数,对LCD进行初始化wr_com(0x80); //调用写控制指令子函数,并用实参"1000 0000"代替形参com//并将数据指针定位到第一行第一个字符处display(str1);//从第一行第一个字符处显示字符串str1wr_com(0x80+0x40);//调用写控制指令子函数,并用实参"1000 0000"代替形参com//并将数据指针定位到第二行第一个字符处display(str2); //从第二行第一个字符处显示字符串str2}/**************************************************************************************************************//******************************ds18b20程序******************************************************************/ void delay_18b20(uint i)//延时1微秒{while(i--);}void ds18b20rst() //ds18b20初始化子函数//要求"数据线拉高-延时-数据线拉低-延时大于480微妙-数据线拉高-延时等待" {uchar x=0;DQ = 1; //信号线DQ复位delay_18b20(4); //延时DQ = 0; //DQ拉低delay_18b20(100); //精确延时大于480usDQ = 1; //拉高delay_18b20(40);}void ds18b20wr(uchar wdata)/*写数据子函数,无返回值,含参数*/{uchar i=0;for (i=8; i>0; i--)//要写完一个字节,故需要重复8次以下操作{DQ = 0; //数据线拉低DQ = wdata&0x01;//wdata是一个形参,将其与0000 0001进行按位与//按从低到高的顺序发送数据(一次发送一位)delay_18b20(10);DQ = 1; //最后将数据线拉高wdata>>=1; //将wdata右移1位}}uchar ds18b20rd() //读数据子函数,是有返回值dat{uchar i=0;uchar dat = 0;for (i=8;i>0;i--)//要读完一个字节,故需要重复8次以下操作{DQ = 0; //给脉冲信号dat>>=1;DQ = 1; //给脉冲信号if(DQ)dat|=0x80;delay_18b20(10);}return(dat); //返回dat}read_temp() //读取温度值并转换的子函数,有返回值温度值tvalue{uchar a,b;ds18b20rst(); //调用ds18b20初始化子函数ds18b20wr(0xcc);//调用写数据子函数,向ds18b20写命令0xcc//ccH表示跳过ROM读序列号,适用于单机工作,直接向18b20发送温度变换命令ds18b20wr(0x44);//调用写数据子函数,向ds18b20写命令0x44//44H表示启动ds18b20温度转换,结果自行存入9字节的RAM中ds18b20rst(); //调用ds18b20初始化子函数ds18b20wr(0xcc);//同上ds18b20wr(0xbe);//调用写数据子函数,向ds18b20写命令0xbe//beH表示读取RAM中9字节的温度数据a=ds18b20rd(); //调用读数据子函数,并将所得数据给ab=ds18b20rd(); //tvalue=b; //把b的值给tvaluetvalue<<=8; //tvalue左移8位tvalue=tvalue|a;//tvalue与a进行按位或if(tvalue<0x0fff)//tflag=0; //前五位为0时,读取的温度为正,标志位为0,此时只要//将测得数值乘以0.0625即可得到实际温度else //前五位为1时,读取的温度为负,标志位为1,此时需要{ //将测得数值取反后再加1,再乘以0.0625即可得到实际温度tvalue=~tvalue+1;tflag=1; //此时表示负温度}tvalue=tvalue*(0.625);//温度值扩大10倍,精确到1位小数return(tvalue); //返回温度值}/*************************************************************************************************************//************************温度值显示**************************************************************************/ void ds18b20disp()//温度值显示{uchar flagdat;disdata[0]=tvalue/1000+0x30; //百位数disdata[1]=tvalue%1000/100+0x30;//十位数disdata[2]=tvalue%100/10+0x30; //个位数disdata[3]=tvalue%10+0x30; //小数位if(tflag==0)flagdat=0x2b; //正温度显示符号:+elseflagdat=0x2d; //负温度显示负号:-if(disdata[0]==0x30){disdata[0]=0x20; //如果百位为0,不显示if(disdata[1]==0x30){disdata[1]=0x20; //如果百位为0,十位为0也不显示}}wr_com(0x80+0x46); //定位数据指针的位置:第二行第六个字符处wr_dat(flagdat); //显示符号位wr_com(0x80+0x47); //定位数据指针的位置:第二行第七个字符处wr_dat(disdata[0]); //显示百位wr_com(0x80+0x48); //定位数据指针的位置:第二行第八个字符处wr_dat(disdata[1]); //显示十位wr_com(0x80+0x49); //定位数据指针的位置:第二行第九个字符处wr_dat(disdata[2]); //显示个位wr_com(0x80+0x4a); //定位数据指针的位置:第二行第十个字符处wr_dat(0x2e); //显示小数点wr_com(0x80+0x4b); //定位数据指针的位置:第二行第十一个字符处wr_dat(disdata[3]); //显示小数位}/**************************************************************************************************************//********************主程序*********************************************************************************/ void main(){init_play(); //调用lcd初始化显示子函数while(1){read_temp(); //调用ds18b20读取温度ds18b20disp(); //调用温度显示子函数}}/************************************************************************************************************/。