[法律资料]理论力学 第10章 动静法
理论力学第十章PPT
) =0
∑ Fi dt = 0
d(mi vi ) = Fi (e) dt + Fi (i) dt
质点系: ∑d(mi vi ) = ∑ Fi (e) dt + ∑ Fi (i) dt
得 dp = ∑ F dt = ∑dI i
(e)
(e) i
或
dp (e) = ∑ Fi dt
称为质点系动量定理的微分形式 即质点系动量的增量等于作用于质点系的外力 元冲量的矢量和; 或质点系动量对时间的导数等于作用于质点系 的外力的矢量和。
在 t1 t2 内,动量由 p1~ p2 ,有 ~
p2 − p1 = ∑ Ii(e)
i=1
n
称为质点系动量定理的积分形式,即在某一时间 间隔内,质点系动量的改变量等于在这段时间内 作用于质点系外力冲量的矢量和。 动量定理微分形式的投影式
dpx = ∑ Fx(e) dt
dpy dt
= ∑F
(e) y
dpz = ∑ Fz(e) dt
动量定理积分形式的投影式
( p2x − p1x = ∑ I xe)
( p2y − p1y = ∑I ye)
p2z − p1z = ∑ I z(e)
3.质点系动量守恒定律 .
若 ∑F
(e)
≡ 0 , 则 p = 恒矢量
若 ∑ Fx
(e)
≡ 0, 则 px = 恒量
解决动量定理习题步骤
第十章 动 量 定 理
§10-1 动量与冲量
1.动量 . 质点的动量 质点系的动量
mv
n i=1
单位: kg⋅ m/ s
p = ∑mivi
dri d p = ∑mivi = ∑mi = ∑mi ri dt dt ∑mi ri 质心 rc = , m = ∑mi m
理论力学25(重要知识)

MIC=∑MC(FIit) = – JC
式中JC是刚体对于通过质心C 且⊥质量对称平面S的轴的转 动惯量,负号表示主矩MIC与角
加速度的转向相反。
重点辅导
aC
C
FIit FIiC
ainC
mi
aC
aitC
S
FIin
12
12.3.3 刚体惯性力系的简化结果
■ 平动
FIR=-maC
作用于质心C
■ 定轴转动
10.1 质点的动静法
将牛顿第二定律应用于非自由质点有
F +FN = ma
重点辅导
3
F +FN = ma
若引入 FI =-ma, 称为质点的达朗贝尔惯性力 (d’Alembert inertial force),则上式可写成
F +FN +FI = 0 即作用于质点的主动力、约束力和质点的达朗 贝尔惯性力(如果也把它看成一个力的话)在形 式上构成一个平衡力系,这一结果称为质点的达 朗贝尔原理(d’Alembert principle of a particle)。
习题: P.333 15-1,6,7,9,
重点辅导
22
谢谢!
重点辅导
23
FIR=-maC 作用线通过转轴O。
MIz=-Jz
重点辅导
质量对称平面
aC C MIz
O
FIR
13
■ 平面运动
FIR=-maC 作用线通过质心C。
MIC =-JC
质量对称平面
MIC
C FIR
aC S
重点辅导
14
1. 均质杆OA绕O轴在 铅垂平面内作定轴转动
其角速度为,角加速度 为,如图所示。在下面
理论力学 第10章 达朗贝尔原理(动静法)
RAn mgsin0
,
RA
mg 4
c
os0
22
[例2] 牵引车的主动轮质量为m,半径为R,沿水平直线轨道
滚动,设车轮所受的主动力可简化为作用于质心的两个力S 、T 及驱动力偶矩M,车轮对于通过质心C并垂直于轮盘的轴的回
转半径为,轮与轨道间摩擦系数为f , 试求在车轮滚动而不滑
动的条件下,驱动力偶矩M 之最大值。
27
[例1] 质量为m1和m2的两重物,分别挂在两条绳子上,绳又分 别绕在半径为r1和r2并装在同一轴的两鼓轮上,已知两鼓轮对于 转轴O的转动惯量为J,系统在重力作用下发生运动,求鼓轮的 角加速度。
解: 方法1 用达朗贝尔原理求解 取系统为研究对象
28
虚加惯性力和惯性力偶:
RQ1 m1a1 , RQ2 m2a2 , MQO JO J
[例1] 均质杆长l ,质量m, 与水平面铰接, 杆由与平面成0角位
置静止落下。求开始落下时杆AB的角加速度及A点支座反力。
解: 选杆AB为研究对象
虚加惯性力系:
RQ
ml
2
RQn
man
0
,
M QA
J A
ml 2
3
根据动静法,有
20
F 0 , RA mgcos0 RQ 0 (1)
Fi Ni Qi 0 mO (Fi )mO (Ni )mO (Qi )0
注意到 Fi(i) 0 , mO (Fi(i) )0 , 将质点系受力按内力、外力
划分, 则
Fi(e) Qi 0 mO (Fi(e) )mO (Qi )0
8
表明:对整个质点系来说,动静法给出的平衡方程,只 是质点系的惯性力系与其外力的平衡,而与内力无关。
6动静法
向转轴上某一固定点简化: 向转轴上某一固定点简化
FIR = m ( y C α + xC ω 2 ) i + m ( − xC α + y C ω 2 ) j
FIRx = m ( y C α + xC ω 2 ) FIRy = m ( − xC α + y C ω 2 ) M IO = (α ∑ m i x i z i − ω
n
n
(α ∑ m i y i z i + ω
i =1 n
2
∑m x z )j−
i =1 i i i
x
α
y
α ∑ m i ( xi 2 + y i 2 ) k
i =1
α × ri = α k × ( x i i + y i j + z i k ) = α ( − y i i + x i j )
ω × v i = ω k × ω ( − y i i + x i j ) = −ω 2 ( x i11 + y i j ) i
α
O
t F IR
MIO O
n F IR
FIR
FIR = −mac
M IOz = − d LOz d( J O ω ) =− = − J Oα dt dt
a ct
C
a cn
M IO
A 对称面内的 平面问题
16
M IOz = − J Oα
向静点O简化 向静点 简化 主矢: 主矢: F IR = − ma C 主矩: 主矩: M IO
d =− dt
n
n
F IR =
∑
i =1
FiI = −
∑
i =1
达朗贝尔原理(动静法)
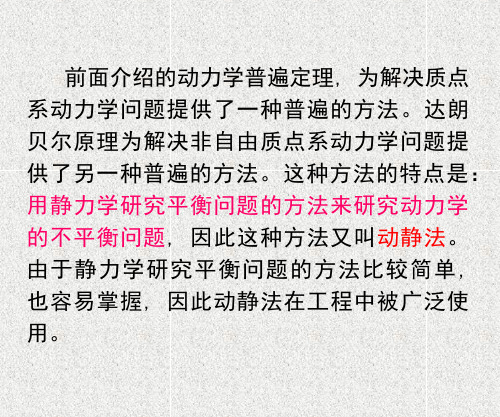
§ 14-1
惯性力· 质点的达朗贝尔原理
ma F FN
F FN ma 0 惯性力 令 F ma I
有
F FN FI 0
质点的达朗贝尔原理:作用在质点的主动力、
约束力和虚加的惯性力在形式上组成平衡力系.
例14-1 已知:
这就是钢球在任一位置 时所受的法向反力, 显然当钢球脱离筒壁 时, FN=0 , 由此可求出其脱离角a为
rw 2 a arccos( ) g
§ 14-2
质点系的达朗贝尔原理
i 1,2,, n
Fi FNi FIi 0
质点系的达朗贝尔原理:质点系中每个质点上作用的主动
x
M A (F ) 0 :
代入FI 的数值, 有
l FI d cos P sin 0 2
Pl 2l 2 sin ( w cos 1) 0 2 3g 3g 故有=0或 arccos( ) 2 2lw
§ 14-3
刚体惯性力系的简化
用质点系的达朗贝尔原理求解质点系的动力学问 题,需要对质点内每个质点加上各自的惯性力,这些 惯性力也形成一个力系,称为惯性力系。下面用静力 学力系简化理论,求出惯性力系的主矢和主矩。 以FIR表示惯性力系的主矢。由质心运动定理及质 点系的达朗贝尔原理
m 0.1kg, l 0.3m, 60
求: 用达朗贝尔原理求解
v , FT .
v 解: F ma m I n l sin
mg FT FI 0
b
2
F
0, FT cos mg 0
F
解得
n
0, FT sin FI 0
理论力学复习资料

力学复习选择:力系简化最后结果(平面,空间)牵连运动概念(运动参考系运动,牵连点运动) 平面运动刚体上的点的运动平面运动的动能计算(对瞬心,及柯里西算法) 质心运动定理(投影法x ,y ,z ,轨迹)惯性力系想一点简化计算:刚体系统平衡计算(多次取分能力体,一般为2次) 平面运动 速度的综合计算 动能定理应用动静法(其他方法不得分),已知运动求力(先用动能(动量)定理求运动,在用动静法求力)注意:1.功的单位是m WN ------∙2.注意检验fs N F f F ≤∙,判断是否是静摩擦,当为临界状态时max f s s N F F f F ==∙,纯滚动为静摩擦S F ,且只能根据平衡方程解出,与正压力无关。
动摩擦f NF f F =∙。
3. 动静法中惯性力简化()=-IC i i CIC c IC c F m a c F ma c M J α⎧⎫=-⎨⎬⎩⎭⎧⎫⎪⎪⇒⎨⎬=------⎪⎪⎩⎭∑质心过点到底惯性力绕点的惯性力偶二维刚体4.e c i i F ma m a ==∑∑, 22d ,d i i cc c m r r r a m t==∑eF ∑=0,则x v =常数=0(初始静止)则c x =常数=坐标系中所在位置,且c S 为直线。
(一直运动求力)5.平面运动刚体动能*222121122c c c J T mv J ωω⎧⎫⎪⎪⎪⎪=⎨⎬⎪⎪+⎪⎪⎩⎭瞬心法:柯里希法: 6.平面运动速度分析方法:a,基点法:,BA BA BA v v v v AB ω=+=,以Bv为对角线的平行四边形b,速度投影法:cos cos B B A A v v θθ=,,B A θθ是以AB 为基准。
c,速度瞬心法:***,*,0,0AB c c v v BC v a ACωω==∙=≠ 7.平面运动加速度分析:A.基点法:nB A BA BA a a a a τ=++,其中,多数情况下n A A A a a a τ=+,n B B B a a a τ=+注:当牵连运动为转动时,有科氏加速度k a ,2kr av ω=⨯大小:2kr a v ω=,方向:r v 向ω方向转90即可。
动静法
F'' FN 得出:损失力等于约束反力冠以负号
(6)达朗伯尔原理:
从上式移项可以得出达朗伯尔原理的表达式:
F'' FN 0
即:非自由质点所受的约束反力与耗损力相平衡。
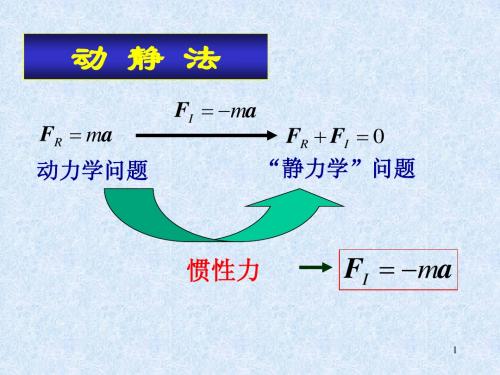
(7)动静法:利用上式变形为:
F ma FN 0
令:F ma, F 称为惯性力
I I
可得到:
F FN F 0
对于动力学问题,“平衡力系”实际并不存在,此
处 仅仅是在每一个质点上假想地加上惯性力后,借用 静力学的平衡理论来求解动力学的问题,因此称为 “动静法”。
例 如图所示,机车沿水平直线轨道以匀加速度 a行驶,求水箱中水面的倾斜角θ。
解: (1)取水的自由表面
y
θ
上质量为m的某一水分
子为研究对象。 (2)受力分析: 水分子的重力mg, 其它水分子给该水分子
I
Ff FN
θ
D n cos 1800 g
2
2
mg
――此即脱离角θ应满足的 条件之一 与此相反,在离心 浇注混凝土管或钢管时, 必须满足:
1800 g n 2 D
这样才能保证混凝土浆或钢水紧贴转筒内壁 而被压紧成形。
2、惯性力系的简化
应用动静法解决质点系动力学的问题时,需要
在每个质点上附加相应的惯性力,这对于质点较多
(3)
即:如果质点系中的每一个质点都加上惯性力,则 作用于质点系的所有主动力约束反力以及惯性力在 形式上组成一平衡力系。 (3)式即为质点系的达朗伯尔原理的表达式。
(10) 动静法
在质点或质点系运动的某一瞬时,除真实作用 在质点或质点系的每一个点的主动力和约束反力外, 再假想地加上各自的惯性力,则可按静力学求解平 衡问题的方法,建立平衡方程,求解质点或质点系 的动力学问题。 具体求解时,仍然选择投影形式的平衡方程。
理论力学第10章
C
B
Dபைடு நூலகம்
vCD
×
输入文件检查 构件数量 = 3 构件号= 1 构件类型代码= 1 2 (主动构件,转动 ) 角速度分量(w),角加速度分量(e) .000 .000 -5.000 .000 .000 .000 约束类型数= 2 2 自由度约束个数 = 1 2 自由度约束坐标(x,y) .000 .000 .000 1.000 1.000 .000 联接点约束个数 = 1 联接点约束中2自由度约束个数= 1 联接点约束中2自由度约束坐标(x,y) .000 -1.000 .000 1.000 1.000 .000 构件号= 2 构件类型代码= 0 3 (被动构件,平面运动) 基点坐标,角速度矢量方向 .000 -1.000 .000 .000 .000 1.000 约束类型数= 1 联接点约束个数 = 2 联接点约束中1自由度直线约束个数= 1 联接点约束中1自由直线约束坐标(x,y) -1.000 -2.000 .000 -.710 .710 .000 联接点约束中2自由度约束个数= 1 联接点约束中2自由度约束坐标(x,y) .000 -1.000 .000 1.000 1.000 .000
第十章 运动构件系统 分析和计算机计算
沈阳建筑大学
侯祥林
第十章 运动构件系统分析和计算机计算
§10-1 刚体一般运动概述
§10-2 构件系统运动分析
§10-3 构件系统运动计算机计算
例题
第十章 运动构件系统分析和计算机计算
§10-1 刚体一般运动概述
1. 刚体的定点运动 刚体运动时,若体内有一点在空 间的位置保持不变则这种运动为刚 体的定点运动 O xyz 为过定点O的定坐标系, 固定 在刚体上的动坐标系为O x´y´ z ´, ON是坐标O x´y´和O xy 的平面交线 称为节线 ON和x轴的夹角ψ---进动角 z ´轴和z轴θ----章动角。
理论力学 第11章 达朗伯原理(动静法)
解: (1)绳FI 被剪断后,板在其自身平面内作
D
E
曲线平动,各点的速度、加速度均相同。 板受力如图。
∵剪断绳FI 瞬时,vA= 0,
FA
60° y FB
60°
A
aA
B
∴ aA = aA = aC 对板虚加惯性力, FI = maC
……①
FICຫໍສະໝຸດ bFG MIaC x
则根据达朗伯原理,有
∑FX = 0,
(2)当AD、BE铅直时,板受力如图。
设板质心的加速度如图。 虚加板的惯性力系,且
D
E
60°
FA l
FB
FIn=maCn , FI =maC
……①
A
B
则根据达朗伯原理,有
aCn FFII C
∑ FX = 0, -FI = 0
……②
FG
aC MI
∑ FY = 0, FA+ FB -MI-FIn = 0 ……③
• 达朗伯原理将非自由质点系的动力学方程用静力学平衡方程的形式表述。 或者说,将事实上的动力学问题转化为形式上的静力学平衡问题,既所 谓“动静法”。
12.1 惯性力与达朗伯原理
图示圆锥摆摆长为l,摆锤M 的质量m,在水平面内 作匀速圆周运动,速度为v,锥摆的顶角为2φ。 摆锤 M 受力如图,其加速度为
i 1
i 1
② 在解决质点系动力学的两类基本问题上,达朗伯原理均适用。 但若已知质点系的运动,需要求解该系统的约束反力或外力时, 应用达朗伯原理尤其方便。
③ 应用达朗伯原理的关键是解决质点系的惯性力系的简化问题。
12.2 惯性力系的简化—— 一、刚体作平动
在同一瞬时,平动刚体内各点的加速度相等,
动静法
n A
τ
(1) (2) (3)
3g ε = cosϕ0 ; ( 由 3)得: 2l mg τ (1) cosϕ0 。 代入 得: RA = − 4
22
理力13理力13-动静法
一、惯性力 一、惯性力
r r r 人用手推车 F' = −F = −ma
图保持原来的运动状态, 图保持原来的运动状态,对于
是由于小车具有惯性, 力 F ' 是由于小车具有惯性,力 施力物体(人手 产生的反抗力。 施力物体 人手)产生的反抗力 人手 产生的反抗力。
r r 定义: 定义:质点惯性力 FI = −ma
实际应用时, 与静力学一样, 实际应用时, 与静力学一样,可以任意选 取研究对象, 列平衡方程求解。 取研究对象, 列平衡方程求解。
11
理力13理力13-动静法
【 例 13-2】 两个相同的小球连接如图示 : 轻质 】 两个相同的小球连接如图示: 细杆AO=BO=b, 小球 、B的质量匀为 , 轻 的质量匀为m, 细杆 , 小球A、 的质量匀为 质转轴CD以匀角速度ω转动,杆 AB与轴 的 以匀角速度ω 与轴CD的 质转轴 以匀角速度 转动, 与轴 夹角为α 的约束力。 夹角为α,CD=L。求轴承 、D的约束力。 。求轴承C、 的约束力 解: A A 1) 取整体为研究对象; 取整体为研究对象; 小球的法向加速度相等: 小球的法向加速度相等:
动的物体的惯性反抗的总和。 动的物体的惯性反抗的总和。
称为小车的惯性力。 称为小车的惯性力。 惯性力
加速运动的质点,对迫使其产生加速运 加速运动的质点,
3
理力13理力13-动静法
惯性力投影式: 惯性力投影式:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
m1 πR12l m2 π R22l
Jz
1 2
π l(R14
R24 )
1 2
π l(R12
R22 )(R12
R22 )
由 π l(R12 ,R22得) m
Jz
1 2
m(
R12
R22 )
h
21
5.实验法 思考:如图所示复摆如何确定对转轴的转动惯量?
1.平移
ai aC
rC
miri M
F g,F 1 g, 2,F g nF R g
,
F R gF g im ia i M a C
M g o m 0 ( F g ) i r i m i a i (m i r i ) a C
M r C a C r C ( M a C ) r C F Rg
力系平衡条件
Fi(e) Fi(i) Fgi 0 mo (Fi(e) ) mo (Fi(i) ) mo (Fgi ) 0
注意内力力系自相平衡
Fi(i) 0 mo (Fi(i) ) 0
推得
Fi(e) Fgi 0 mo (Fi(e) ) mo (Fgi ) 0
h
12
解:1. 研究重物H
Fy 0
Fg1m1a12m1a
P1TFg10
2. 研究三角板BCK
Fy 0
Tsi4 n5P 2Fg20
3. 运动学补充方程
vBco2s vH 0
aB t co2sv4B 2 lsin2aH0
h
13
2.定轴转动(平面)
F g1,F g2, ,F gn 向转轴O简化
质点系统动力学方程
F x ( e ) F gx 0
F y ( ) F gy 0
F z ( e ) F gz 0
m
x
(F
(e i
)
)
m x ( F gi ) 0
m y ( F i( ) ) m y ( F gi ) 0
m(z
F
( i
t
))
m z ( F gi ) 0
FRg,Mgo
ai ati ain
ait ri
F R g F g im ia i M a C
ain 2ri
M g Om O ( F g ) i m O ( F g t i F g n )i
mO(Fgti) ( miri2)JO
h
14
§10-4 刚体对轴的转动惯量
Jz miri2 r2dm
F (e) 1
,
F1(i
)
,
F2(
e)
,
,
F (i) 2
,,
F (e) n
,
F (i) n
引入第i个质点的惯性力
Fgi miai
Fi(e) Fi(i) Fgi 0
平衡力系
F1(e) , F1(i) , Fg1, F2(e) , , F2(i) , Fg2 , Fn(e) , Fn(i) , Fgn
3. 结果
SDE m23a0 g
例10-3 均质三角板BCK质量为m,由两根平行的无重杆AB、 CD支撑。重物H的质量为2m。初始系统静止,θ=90o,求该 瞬时重物H的加速度。
例10-3 均质三角板BCK质量为m,由两根平行的无重杆AB、 CD支撑。重物H的质量为2m。初始系统静止,θ=90o,求该 瞬时重物H的加速度。
OC MgC 0
例10-2 如图:框架底座CE以加速度a0 沿水平面运动。 已知:mABC=2m, mDE=0, CD=CE=BD=h, AB=2h, 不计摩擦。试求杆DE的内力
解:
1. 取直角弯杆ABCE为研究对象
Fg1Fg2 m0a 2. 平衡方程
mC 0
P Ah B F g 1 2 h F g 2 h S D h E c4 o 5 s 0
或
Jz
m
2 z
h
16
3.平行轴定理
Jz JzC md 2
式中 z轴C 为过质心且与 轴z平行的轴, 为d z
与 zC轴之间的距离。
即:刚体对于任一轴的转动惯量,等于刚体对于通过 质心并与该轴平行的轴的转动惯量,加上刚体的质量 与两轴间距离平方的乘积.
h
17
证明:
JzC mi (x12 y12 )
缘较薄,质量均匀分布,轮辐质量不计。若不考虑重力的影 响,求轮缘横截面的张力。
解:1.取四分之一轮缘为研究对象
Fgi miain
2.列平衡方程
Fx 0
m 2R
F gc i oi sF A0
mi dsRd
FA022 m R2co dsm 2R 2
mR 2 FB 2
§ 10-3 刚体简单运动时惯性力系的简化
理论力学
第十章 动静法
h
1
§ 10-1 惯性力·质点的达朗贝尔原理
ma F FN
FI
惯性力
Fg ma
F FN Fg 0
m
FN
F
ma
--质点的达朗贝尔原理
作用在质点的主动力、约束力和虚加的惯性力在形 式上组成平衡力系.
§ 10-2 质点系的达朗贝尔原理
质点系 m1, m2,, mn
Jz m i r2 m i (x2 y2) mi[x12 ( y1 d )2 ]
0 mi (x12 y12 ) 2d mi y1 d 2 mi
Jz JzC md 2
h
18
例
JCJO 1 4M 21 l3M 21 4 lM 2 1 l1M 22 l
h
19
4.组合法
已知:杆长为 l质量为 m,1 圆盘半径为 ,d质量为 . m2
求:JO .
解: JO JO杆 JO盘
J O杆
1 3
ml2Βιβλιοθήκη J O盘1 2m2
(
d 2
)
2
m2 (l
d )2 2
3 m2 (8
d
2
l2
ld )
JO
1 3
m1l 2
m2
(
3 8
d
2
l2
ld
)
h
20
已知:m, R1。, R2
求 :J.z
解:
J z J1 J2
1 2
m1 R12
1 2
m2 R22
其中
M
1. 简单形状物体的转动惯量计算
(1)均质细直杆对一端的转动惯量
M, dmdx
l
Jz
x2dm lx2d xl31m2l
0
33
h
15
(2)均质圆板对中心轴的转动惯量
M R2 dm dS rdrd
Jzr2dm r2rdrd
2kr3d r1R41M2R
0
22
2. 回转半径(惯性半径)
z
Jz m
F
(e) x
F Rgx
0
F y ( e ) F Rgy 0
F z ( e ) F Rgz 0
m
x
(F
(e) i
)
M
gx
0
m
y
(
F
( i
)
)
M
gy
0
m
(
z
F
( i
e
))
M
gz
0
F g,1 F g, 2,F gn FRg,Mgo
例10-1 飞轮质量为m,半径为R,以匀角速度ω转动。设轮