电机转速的T法测量
无刷直流电机(BLDC)双闭环调速解析
无刷直流电机(BLDC)双闭环调速系统在无刷直流电机双闭环调速系统中,双闭环分别是指速度闭环和电流闭环。
对于PWM 的无刷直流电机控制来说,无论是转速的变化还是由于负载的弯化引起的电枢电流的变化,可控量输出最终只有一个,那就是都必须通过改变PWM的占空比才能实现,因此其速度环和电流环必然为一个串级的系统,其中将速度环做为外环,电流环做为内环。
调节过程如下所述:由给定速度减去反馈速度得到一个转速误差,此转速误差经过PID调节器,输出一个值给电流环做给定电流,再由给定电流减去反馈电流得到一个电流误差,此电流误差经过PID 调节器,输出一个值就是占空比。
在速度环和电流环的调节过程中,PID的输出是可以作为任意量纲(即无量纲,用标幺值来表示;标幺值:英文为per unit,简写为pu,是各物理量及参数的相对单位值,是不带量纲的数值)来输入给下一环节或者执行器的,因此无需去管PID输出的量纲,只要是这个输出值反映了给定值和反馈值的差值变化,能够使这个差值无限趋近于零即可,相当于将输出值模糊化,不用去搞的太清楚,如果你要是一直在这里纠结输出值具体是个什么东西时,那么你就会瞎在这里出不来了。
假如你要控制一个参数,并且这个参数的大小和你给定量和反馈量有着直接的关系(线性关系或者一阶导数关系或者惯性关系等),那么就可以不做量纲变换。
比如速度环的PID之后的输出就可以直接定义为转矩,因为速度过慢就要提高转矩,速度过快就要减小转矩,PID输出量的意义是调整了这个输出量,就可以直接改变你要最终控制的参数,并且这个输出量你是可以直接来控制的,这种情况下PID输出的含义是你可以自己定的,比如直流电机,速度环输出你可以直接定义为转矩,也可以定义为电流,然后适当的调节PID的各个参数,最终可以落到一个你能直接控制的量上,在这里最终的控制量就是占空比的值,当占空比从0%—100%时对应要写入到寄存器里面的值为0—3750时,那么0—3750就是最终的控制量的范围。
(精品)霍尔传感器测量电机转速(整理)
霍尔传感器测量电机转速一、背景随着单片机的不断推陈出新,特别是高性价比的单片机的涌现,转速测量控制普遍采用了以单片机为核心的数字化、智能化的系统。
本文介绍了一种由单片机C8051F060作为主控制器,使用霍尔传感器进行测量的直流电机转速测量系统。
二、工作原理1、转速测量原理转速的测量方法很多,根据脉冲计数来实现转速测量的方法主要有M法(测频法)、T法(测周期法)和MPT法(频率周期法),该系统采用了M法(测频法)。
由于转速是以单位时间内转数来衡量,在变换过程中多数是有规律的重复运动。
根据霍尔效应原理,将一块永久磁钢固定在电机转轴上的转盘边沿,转盘随测轴旋转,磁钢也将跟着同步旋转,在转盘下方安装一个霍尔器件,转盘随轴旋转时,受磁钢所产生的磁场的影响,霍尔器件输出脉冲信号,其频率和转速成正比。
脉冲信号的周期与电机的转速有以下关系:式中:n为电机转速;P为电机转一圈的脉冲数;T为输出方波信号周期根据式(1)即可计算出直流电机的转速。
霍尔器件是由半导体材料制成的一种薄片,在垂直于平面方向上施加外磁场B,在沿平面方向两端加外电场,则使电子在磁场中运动,结果在器件的2个侧面之间产生霍尔电势。
其大小和外磁场及电流大小成比例。
霍尔开关传感器由于其体积小、无触点、动态特性好、使用寿命长等特点,故在测量转动物体旋转速度领域得到了广泛应用。
在这里选用美国史普拉格公司(SPRAGUE)生产的3000系列霍尔开关传感器3013,它是一种硅单片集成电路,器件的内部含有稳压电路、霍尔电势发生器、放大器、史密特触发器和集电极开路输出电路,具有工作电压范围宽、可靠性高、外电路简单<输出电平可与各种数字电路兼容等特点。
2、转速控制原理直流电机的转速与施加于电机两端的电压大小有关,可以采用C8051F060片内的D/A转换器DAC0的输出控制直流电机的电压从而控制电机的转速。
在这里采用简单的比例调节器算法(简单的加一、减一法)。
转速以及误差
基于PLC的异步电机变频控制系统的分析一组组长:张慧一、异步电机控制的原理框图如下所示:通过传感器测量所得的信号送入PLC,与设定值进行比较,经PID 控制算法得到控制规律,将其送入变频器,通过变频器来完成电机的控制。
二、转速测量转速的测量通过旋转编码器完成。
每个电机尾端安装一个编码器,将从电机上采到的信号反馈回PLC,组成一个速度闭环。
PLC 需要将传感器来的信号转换成转速,测转速主要有以下几种方法:1、M法测量转速M法测转速指旋转编码器每转可以产生N个脉冲信号,在给定的时间△T内,读取的脉冲个数m,可以直接得出电机转速,当时间固定时,通过统计盘脉冲个数,可以得出转子旋转过的角度,再除以时间即可得转子转速。
2、T法测量转速计时法是以一个高频信号f作为基准,传感器每周产生N个脉冲信号,测量两个相邻码盘脉冲个数。
当盘脉冲间隔固定时,通过统计时钟脉冲个数,可以得出转子旋转过一个盘脉冲间隔所花的时间,由盘脉冲间隔除以时间即可得转子转速。
3、M/T法测量转速M/T法测量转速的方法是综合了上面两种方法而成的。
3种方法中,M法在低速时分辨率不高,T法在高速时分辨率低,M/T法与速度几乎无关。
从精度角度而言,也是M/T法误差小,精度高。
但在低速时为保证结果的准确性,该方法需要较长的检测时间,这样就无法满足转速检测系统的快速动念响应指标。
利用上述的方法,编写相应的PLC程序,即可实现对转速的测量。
测量的转速与设定转速比较可以得到测量误差。
三、PID控制1、比例积分微分调节(PID 调节)PID (比例 - 积分 - 微分)控制器作为最早实用化的控制器已有 50 多年历史,现在仍然是应用最广泛的工业控制器。
PID 控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。
比例调节作用是指按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的振荡。
变频器常用检测方法
1 引言控制系统反馈量检测的精确程度,从某种意义上说,很大程度上决定了控制系统所能达到的控制品质。
检测电路是变频调速系统的重要组成部分,它相当于系统的“眼睛和触觉”。
检测与保护电路设计的合理与否,直接关系到系统运行的可靠性和控制精度。
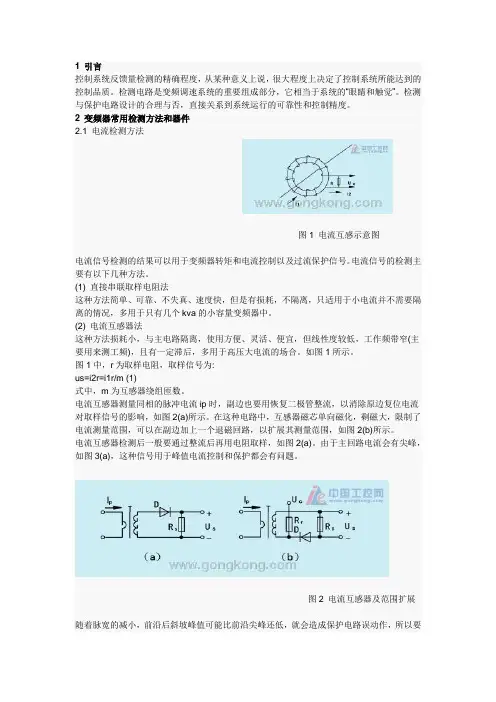
2 变频器常用检测方法和器件2.1 电流检测方法图1 电流互感示意图电流信号检测的结果可以用于变频器转矩和电流控制以及过流保护信号。
电流信号的检测主要有以下几种方法。
(1) 直接串联取样电阻法这种方法简单、可靠、不失真、速度快,但是有损耗,不隔离,只适用于小电流并不需要隔离的情况,多用于只有几个kva的小容量变频器中。
(2) 电流互感器法这种方法损耗小,与主电路隔离,使用方便、灵活、便宜,但线性度较低,工作频带窄(主要用来测工频),且有一定滞后,多用于高压大电流的场合。
如图1所示。
图1中,r为取样电阻,取样信号为:us=i2r=i1r/m (1)式中,m为互感器绕组匝数。
电流互感器测量同相的脉冲电流ip时,副边也要用恢复二极管整流,以消除原边复位电流对取样信号的影响,如图2(a)所示。
在这种电路中,互感器磁芯单向磁化,剩磁大,限制了电流测量范围,可以在副边加上一个退磁回路,以扩展其测量范围,如图2(b)所示。
电流互感器检测后一般要通过整流后再用电阻取样,如图2(a)。
由于主回路电流会有尖峰,如图3(a),这种信号用于峰值电流控制和保护都会有问题。
图2 电流互感器及范围扩展随着脉宽的减小,前沿后斜坡峰值可能比前沿尖峰还低,就会造成保护电路误动作,所以要对电流尖峰进行处理。
处理的方法见图3(b),和rs并联一个不大的电容cs,再加一个合适的rc参数,就能有效地抑制电流尖峰。
如图3(c)所示。
图3 电流取样信号的处理(3) 霍尔传感器法它具有精度高、线性好、频带宽、响应快、过载能力强和不损失测量电路能量等优点。
其原理如图4所示。
图4中,ip为被测电流,这是一种磁场平衡测量方式,精度比较高,若lem的变流比为1:m,则取得电压us也符合式(1)。
转速测量
电机转速测试原理及方法1.转速测量原理数字测速法按照其原理可分为三大类:一类是用单位时间内测得的物体旋转角度来计算速度,例如在单位时间内,累计转速传感器发出的个脉冲,即为该单位时间内的速度。
这种以测量频率来实现测速的方法,称为测频法,即M 法;另一类是在给定的角位移距离内,通过测量转过这一角位移的时间来实现测速,称为测周法,即T 法。
例如转过给定的角位移△θ,传感器便发出一个电脉冲周期,以晶振产生的标准脉冲来度量这一周期时间,经换算便可得转速。
以上两种方法的优缺点是M 法一般用于高速测量,转速过低时,测量误差较大,同时检测装置对转速的分辨能力也较差;而T 法则一般用于低速测量,速度越低,测量精度越高,在高速时误差较大。
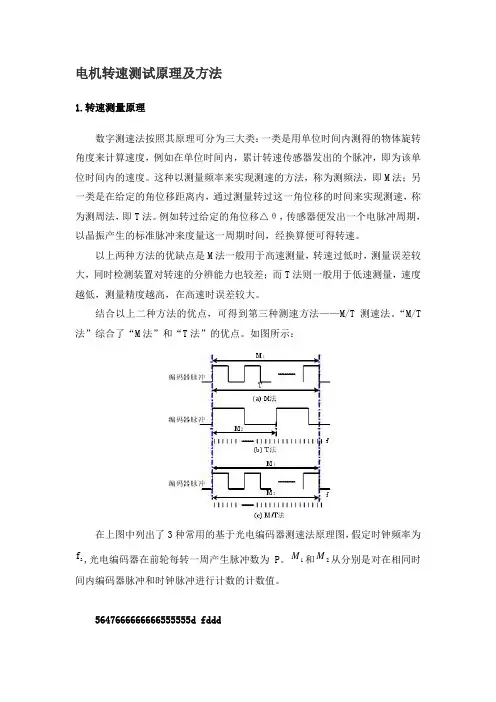
结合以上二种方法的优点,可得到第三种测速方法——M/T 测速法。
“M/T 法”综合了“M 法”和“T 法”的优点。
如图所示:在上图中列出了3种常用的基于光电编码器测速法原理图,假定时钟频率为s f ,光电编码器在前轮每转一周产生脉冲数为P 。
1M 和2M 从分别是对在相同时间内编码器脉冲和时钟脉冲进行计数的计数值。
5647666666666555555d fddd2.下面介绍几种编码器测速方法(1)“M 法”测速通过测量一段固定时间间隔内的编码器脉冲数来计算转速。
如图所示;设在固定时间T 内测得的编码器脉冲数为1M ,则用1M 除以T(即T M 1)得到单位时间内编码器产生的脉冲数,用它再除以P ,则得到的1M /(T ×P)表示单位时间内前轮转动的周数,最后再乘以60(s)就得到前轮每分钟转动的周数,从而实现计算转速的目的。
用公式表示为PT M 160n =根据以上分析,可知这种测速方法的准确性主要由1M 决定,并且在转速较高时也1M 较大,其相对误差较小,故适合于高速场合测试。
(2)“T 法”测速通过测量编码器两个相邻脉冲的时间间隔来计算转速,则用2M 除以f 得到1个编码脉冲所占用的时间,其倒数(即:2f M )为单位时间内编码器产生的脉冲数,与“M 法”测速类似,即得转速计算公式2f 60n PM =这种测速方法的准确性主要由2M 决定,并且在转速较低时,1个编码器脉冲持续时间较长,2M 从也相对较大,其相对误差较小,故适合于低速场合。
盘点电机扭矩的测量方法有哪些
盘点电机扭矩的测量方法有哪些扭矩是电机试验中一个重要的参数,尤其是在电机效率评测中扭矩更是一个不可或缺的被测量,扭矩测量的准确性直接关系到电机效率的评测的正确性。
目前使用的扭矩测量方法按照测量原理可分为平衡力法、传递法和能量转换法。
一、平衡力法处于匀速工作状态的传动机械构件,其主轴和机体上一定同时存在一对扭矩T 和T,并且二者大小相等、方向相反。
通过测量机体上的T来测量主轴上T 的方法称为平衡力法。
设F 为力臂上的作用力,L 为力臂长度,则T=LF。
通过测量作用力F和力臂L即可得出T和T。
平衡力法的优点是不存在传递扭矩信号的问题,力臂上的作用力F容易测得;缺点是测量范围仅局限为匀速工作状态,无法完成动态扭矩的测量。
二、传递法传递法利用传递扭矩时弹性元件的物理参数会发生某种程度的变化。
利用这种变化与扭矩的对应关系来测量扭矩。
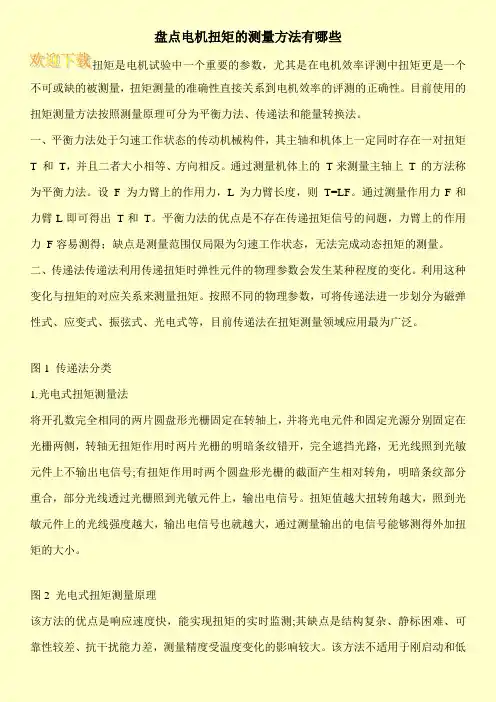
按照不同的物理参数,可将传递法进一步划分为磁弹性式、应变式、振弦式、光电式等,目前传递法在扭矩测量领域应用最为广泛。
图1 传递法分类1.光电式扭矩测量法将开孔数完全相同的两片圆盘形光栅固定在转轴上,并将光电元件和固定光源分别固定在光栅两侧,转轴无扭矩作用时两片光栅的明暗条纹错开,完全遮挡光路,无光线照到光敏元件上不输出电信号;有扭矩作用时两个圆盘形光栅的截面产生相对转角,明暗条纹部分重合,部分光线透过光栅照到光敏元件上,输出电信号。
扭矩值越大扭转角越大,照到光敏元件上的光线强度越大,输出电信号也就越大,通过测量输出的电信号能够测得外加扭矩的大小。
图2 光电式扭矩测量原理该方法的优点是响应速度快,能实现扭矩的实时监测;其缺点是结构复杂、静标困难、可靠性较差、抗干扰能力差,测量精度受温度变化的影响较大。
该方法不适用于刚启动和低。
MT法测速
摘要在控制领域中,经常需要进行各种角度、位移量的测量。
当前,世界上正面临着一场新的技术革命,这场革命的重要基础之一就是测量技术。
测量技术的发展给人类社会和国民经济的各个部门及各个领域带来了巨大的、广泛的、深刻的变化,带动着传统工业和其他新兴产业的更新和变革,是当今人类社会发展的强大动力。
本设计为码盘转速测量系统,用来测量来自外部的不同的转速值。
实现转速的实时测量,显示。
具体应用AT89C51单片机为核心,旋转编码器实时轴转速测量,同时用LCD显示模块显示。
本文从转速测量原理入手,详细阐述了转速测量系统的工作过程,以及硬件电路的设计、显示效果。
本文吸收了硬件软件化的思想,实现了题目要求的功能。
关键词:转速测量,旋转编码器,单片机,LCD显示模块AbstractIn the control field, a variety of angles and displacement measurements often need to be carried out. At present, the world is facing a new technological revolution; one of the most important bases of the revolution is measurement. The development of measurement technology brings extensive,tremendous and profound changes to human society and all sectors of the national economy, changes the traditional industries and other emerging industries, becomes today's strongest driving force for development of human society .The encoder speed measurement system is designed to measure a different speed from the outside values,to achieve real-time speed measurement and display. Specific application use AT80C51 microcontroller as its core, rotary encoder measures real-time shaft speed, in both 8 serial Segment type LCD display module display. In this paper, detailed working process of speed measurement system is started with principle of speed measurement, and hardware circuit design and display. This paper has absorbed the idea of hardware and software to achieve with the subject required functionality.Key words:rotational speed measurement, rotary encoder, microcontroller, LCD display module目录前言 (1)第1章总体设计 (2)1.1转速测量系统的方法 (2)1.1.1 测频法“M法” (2)1.1.2 测周期法“T法” (3)1.1.3 测频测周法“M/T法” (4)1.1.4 转速测量系统中应用的方法 (5)1.2转速测量系统的总体框图 (5)第2章硬件设计 (6)2.1 旋转编码器 (6)2.1.1 增量式编码器 (6)2.1.2 绝对值编码器 (6)2.2 最小系统的设计 (7)2.2.1复位电路 (7)2.2.2 晶振电路 (7)2.3 1602简介 (8)2.3.1 1602的控制原理 (8)2.3.2 1602的基本的读写时序图 (9)第3章软件设计 (11)3.1 主程序初始化 (11)3.2序流程 (11)3.3中断程序流程图 (13)第4章结果仿真 (14)结论 (15)辞谢 (16)主要参考文献 (17)附录 (18)前言在工程实践中,经常会遇到各种需要测量转速的场合, 例如在发动机、电动机、卷扬机、机床主轴等旋转设备的试验、运转和控制中,常需要分时或连续测量和显示其转速及瞬时转速。
M法T法测速单片机程序设计
M法、T法测速单片机程序设计摘要本设计为M法、T法测速的单片机程序设计。
使用STC89C52单片机作为控制器,使用该单片机的外部中断和定时器对编码器的输出的脉冲进行采样来计算出电机的转速。
可以使用按键输入来调整M法、T法测速法中Z、Tc和Tt等参数以及测速方法的选择,以此来增强本设计的适应性。
参数选择结果和电机转速计算结果均显示在LCD1602上。
关键字:STC89C52,M法、T法测速,LCD1602,电机转速1AbstractThis design as m, t-law velocity measurement of single-chip computer programming. Using STC89C52 single-chip computer as the controller, using the microcontroller's external interrupts and timers for encoder output pulse is sampled to calculate the speed of the motor. Can be adjusted using touchtone m, t law Velocimetry parameters such as z, Tt and Tc, as well as in speed measurement method of choice, as a way to enhance the adaptability of this design. Parameter selection and calculation of motor speed results are available on LCD1602.Keywords:STC89C52,M、T method, the LCD1602, Motor speed1目录第1章绪论 (1)1.1旋转编码器 (1)数字测速的精度指标 (2)分辨率 (2)测速误差率 (2)1.3M法测速 (2)1.4T法测速 (3)第2章硬件系统设计 (5)STC89C52介绍 (5)硬件电路 (6)时钟电路 (6)显示电路 (7)速度检测电路 (7)按键输入电路 (8)第3章系统软件设计 (9)主程序设计 (9)M法测速程序设计 (10)T法测速程序设计 (11)总结 (12)参考文献 (13)附录A 系统原理图 (14)附录B 主要C语言源程序 (15)1第1章绪论1.1旋转编码器旋转编码器是用来测量转速的装置,光电式旋转编码器通过光电转换,可将输出轴的角位移、角速度等机械量转换成相应的电以数字量输出(REP)。
电机转速、电流、电压测量方法与原理
姓名:张廷刚学号:1420310064 研究方向:电力电子1、电流的检测方法电机控制系统的中的电流检测主要是对电机定子电流进行检测,电流检测的常用方法主要有:采样电阻法、电流互感器法、霍尔电流传感器法等。
1.1 采样电阻法采样电阻测电流的原理:将采样电阻串接在要监测的电路回路里,电流流过时,在采样电阻两端产生压降,这样就把电流信号转化为电压信号。
然后,对该电压信号进行处理变换,输入到微处理器的A/D单元,完成检测的目的。
1.1.1 采样电阻的使用条件使用采样电阻检测方法实现简单,成本低,但是很难做到电阻值稳定不变,采样精度不高,不能提供准确的电流值。
而且反馈控制电路与主电路没有隔离,在电机驱动控制系统中,万一功率电路的高电压通过反馈电路进入控制电路,将危及到控制系统的安全。
因此,采样电阻一般应用在精度要求不高、成本敏感,温度低的应用场合。
1.2霍尔电流传感器法在电机控制系统中,主要使用霍尔电流传感器对电机三相定子电流进行检测。
一般将霍尔电流传感器紧紧的套在三相定子电流导线上,并通过信号调理电路进行处理,经如图1所示电路,从而对电流进行检测。
图1定子电流检测及信号调理电路1.2.1 霍尔电流传感器的使用条件霍尔电流传感器的工作原理主要基于霍尔器件和磁补偿原理进行检测,因此使用使用时应避免电磁干扰对传感器的影响。
此外霍尔电流传感器的供电电压必须在传感器所规定的范围内,超过此范围,传感器不能正常工作或者可靠性降低。
霍尔电流传感器的电源、输入、输出的各连线导线必须正确连接,不可错位或反接,否则可能导致产品损坏。
安装环境应无导电尘埃及腐蚀性。
应避免剧烈震动或者高温。
1.3 电流互感器法电流互感器法是将电流互感器串连在电机三相定子电流导线中,利用变压器原、副边电流成比例的关系进行电流大小的转换检测。
其工作原理、等电路也与一般变压器相同,只是其原边绕组串联在被测电路中,且匝数很少;副边绕组接电流表、继电器电流线圈等低阻抗负载,近似短路。
电机的几种测速方法
电机的几种测速方法合肥工业大学自动化研究所(230009) 肖本贤 陈荣保安徽省电力工业局中心调度所(230061) 李 斌 葛 晖 【摘要】分析讨论了几种常用的电机测速方法的特点和应用,它对不同使用场合,选择合适的测速方法构成转速闭环具有实际意义。
关键词 测速方法 反馈测量 传感器一、引言数控系统中,检测是不可缺少的一个重要环节。
在N C 机床中,最关键的检测环节就是电机进给速度与位置的测试。
为了提高N C 机床中电机的调速与伺服性能,如调速精度、稳定性和快速性,均需采用转速闭环控制,从而需要检测电机的转速,其检测方法多种多样,且与选用的传感器类型有关,但概括起来主要有脉冲数字式、电压模拟式及专用集成电路方式。
因此在选配时要根据不同的使用场合,全面衡量。
因此,我们针对带有转子位置检测器这类伺服电机,分析讨论了与之相适应的几种测速方法,并对各种方法作了研究和评价。
二、永磁直流测速发电机永磁直流测速发电机以其灵敏度高、线性误差小、受温度变化的影响较小、结构简单、耐振动冲击、极性可逆等优点目前受到了广泛应用,但由于电刷和换向器的存在带来一些弊病:如可靠性差,使用环境受到限制,电刷与换向器的摩擦,增加了被测电机的粘滞转矩;电刷的接触压降造成了输出低速时的不灵敏区,如图1所示;电刷与换向器的间断接触或不良接触引起射频噪声,产生无线电干扰的高频纹波;以及电刷压降引起输出电压的不稳定等。
以上缺点都是有刷直流测速发电机固有的,有些缺点可通过特殊设计、补偿及滤波方法来解决,它是以电压的形式直接给出被测电机的转速。
图1 直流测速发电机的实际输出特性三、无刷直流测速无刷直流测速发电机从根本上取消了电刷与换向器这种接触装置,改善了测速发电机的性能,提高了运行的可靠性,是直流测速机的一个发展方向。
产品的无刷化已成为一种明显的发展趋势。
特别是电子技术的发展,使其测速电路的集成化程度有了迅速提高,赋予新型机电一体化方波无刷直流测速发电机更强的生命力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电子技术综合训练设计报告题目:电机转速的T法测量姓名:学号:班级:同组成员:指导教师:日期:2013年摘要本设计为电机转速的T法测量,在设计中,用555构成的多谐振荡器产生时基脉冲,用74LS160构成十进制模100计数器对光电码盘送入的脉冲进行加计数,利用D触发器和与门作为计数电路的控制,用两个单稳态触发器控制锁存和清零,利用HEF4511BP驱动数码显示器,动态显示时基脉冲数,最后根据脉冲数计算电机转速。
关键词:555,计数,显示AbstractThe design for the motor speed measurement method of T, in the design, multivibrator composed by 555 generation time-base pulse, pulse decimal mode 100 counter on the photoelectric encoder to count 74LS160, use D flip-flop and gate control as the counting circuit, two monostable trigger control latch and clear using the HEF4511BP driver, digital display, a time-base pulse number of dynamicdisplay, according to the calculation of the motor speed pulse.Keywords: 555, counting, display目录1 设计任务和要求…………………………………………………………?1.1设计任务……………………………………………………………?1.2设计要求…………………………………………………………….?2 系统设计…………………………………………………………………?2.1系统要求…………………………………………………………….?2.2方案设计……………………………………………………………?2.3系统工作原理……………………………………………………….?3 单元电路设计……………………………………………………………?3.1 555振荡电路………………………………………………………?3.1.1电路结构及工作原理……………………………………………?3.1.2电路仿真…………………………………………………………?3.1.3元器件的选择及参数确定……………………………………………?3.2 计数电路和显示电路的设计……………………………………?3.2.1电路结构及工作原理…………………………………………?3.2.2电路仿真…………………………………………………………?3.2.3元器件的选择及参数确定…………………………………………….?3.3 整流电路与控制…………………………………………………………4 系统仿真……………………………………………………………………?.5 电路安装、调试与测试……………………………………………………?5.1电路安装………………………………………………………………?5.2电路调试………………………………………………………………?5.3系统功能及性能测试…………………………………………………?5.3.1测试方法设计………………………………………………………?5.3.2测试结果及分析……………………………………………………?6 结论…………………………………………………………………………?7 参考文献……………………………………………………………………?8 总结、体会和建议附录1设计任务和要求1.1设计任务根据已学过的知识,设计用T法测量电机转速的电路图,并显示电机的正反转,给出测量结果与转速的数量关系。
1.2设计要求1)设计电路能够显示光电码盘的脉冲数的和,并显示电机的正反转;2)给出有关器件的选型和参数计算过程;3)给出测量的结果与转速的数量关系;4)手绘电路原理图;5)设计电路通过计算机仿真后制作电路板,完成调试。
2 系统设计2.1 系统要求1)设计电路能够可靠的工作;2)电路满足要求的精度,显示各变量;3)尽量简化电路,使制作电路板是的连线方式简单容易焊接;4)做到电路板的经济最小化。
2.2方案设计在本电路的设计过程中,用555和外加的门电路构成定时和控制的主电路,作为计数器的的计数和控制信号,用74LS160构成十进制模100计数器,对光电码盘送入的脉冲进行加计数。
利用触发器和与门,作为电路的控制,在外部电源接通的情况下,控制计数器的工作状态,使计数器进行计数、保持计数、清零。
为此,我们可以利用振荡电路的输出在触发器的配合下,利用上升沿启动计数器,下降沿清零的过程。
为了使我们准确的知道计数的结果,将计数过程动态的显示出来,利用数码管驱动和七段码显示构成显示部分,准确的显示计数的结果。
并且数码管的数据保持、清零状态与计数器的状态一致,利用同一个脉冲进行控制,在数码管显示的数据清零前显示的数字就是在这段时间里对电机光电码盘输出的脉冲数的和统计,最后根据脉冲数与电机转速的确定关系计算出电机的转速。
为了使测得的转速比较精确,可以进行多次测量,最后求出平均值,这样就可以满足对精度的要求。
因此,可将555构成多谐振荡,能够周期的工作。
最后通过光电码盘输出信号的特点,利用触发器的输出电平的不同来为发光二级管供电,根据二级管是否发光来确定电机的正反转。
在本电路中,各器件对电源的要求较高,为了电路的可靠工作和器件的安全,在电路中加入了稳压电源,利用变压、整流的过程,直接将220V的工频电变为5V的直流电,保证电路的安全。
经过充分的考虑和广泛的查阅资料,以及我们目前所掌握的专业知识,这个方案中的各部分都能比较容易的实现。
详细的掌握各部分的工作特点,可以将各部分较为准确的组合在一起,成为一个完整的整体。
能够实现要求的功能,满足设计的要求。
能够实现要求的功能,满足设计的要求。
2.3系统工作原理电机在转动的过程带动光电码盘转动,在转动的过程中会有脉冲输出,如图1,电机的转速不能通过较为简单的装置进行测量,但码盘输出的脉冲可以通过电路比较容易的计算出。
所以,为了电路的简单,可将电机的转速通过码盘a b图1:光电码盘的输出脉冲a 电机正转 ,b 电机反转的脉冲间接的计算,对方案进行简化。
3、 单元电路的设计 3.1 555振荡电路集成时基电路又称为集成定时器或555电路,是一种数字、模拟混合型的中规模集成电路,应用十分广泛。
它是一种产生时间延迟和多种脉冲信号的电路,由于内部电压标准使用了三个5K 电阻,故取名555电路。
其电路类型有双极型和CMOS 型两大类,二者的结构与工作原理类似。
几乎所有的双极型产品型号最后的三位数码都是555或556;所有的CMOS 产品型号最后四位数码都是7555或7556,二者的逻辑功能和引脚排列完全相同,易于互换。
555和7555是单定时器。
556和7556是双定时器。
双极型的电源电压V CC =+5V ~+15V ,输出的最大电流可达200mA ,CMOS 型的电源电压为+3~+18V 。
3.1.1 555电路的工作原理555电路的内部电路方框图如图3所示。
它含有两个电压比较器,一个基本RS 触发器,一个放电开关管T ,比较器的参考电压由三只 5K Ω的电阻器构成的分压器提供。
它们分别使高电平比较器A 1 的同相输入端和低电平比较器A 2的反相输入端的参考电平为CC V 32和CC V 31。
A 1与A 2的输出端控制RS 触发器状态和放电管开关状态。
当输入信号自6脚,即高电平触发输入并超过参考电平CC V 32时,触发器复位,555的输出端3脚输出低电平,同时放电开关管导通;当输入信号自2脚输入并低于CC V 31时,触发器置位,555的3脚输出高电平,同时放电开关管截止。
是复位端(4脚),当D R =0,555输出低电平。
平时D R 端开路或接V CC 。
(a) (b)图3 555定时器内部框图及引脚排列V C 是控制电压端(5脚),平时输出CC V 32作为比较器A 1 的参考电平,当5脚外接一个输入电压,即改变了比较器的参考电平,从而实现对输出的另一种控制,在不接外加电压时,通常接一个0.01μf 的电容器到地,起滤波作用,以消除外来的干扰,以确保参考电平的稳定。
T 为放电管,当T 导通时,将给接于脚7的电容器提供低阻放电通路。
555定时器主要是与电阻、电容构成充放电电路,并由两个比较器来检测电容器上的电压,以确定输出电平的高低和放电开关管的通断。
这就很方便地构成从微秒到数十分钟的延时电路,可方便地构成单稳态触发器,多谐振荡器,施密特触发器等脉冲产生或波形变换电路。
构成多谐振荡器如图4,由555定时器和外接元件R 1、R 2、C 构成多谐振荡器,脚2与脚6直接相连。
电路没有稳态,仅存在两个暂稳态,电路亦不需要外加触发信号,利用电源通过R 1、R 2向C 充电,以及C 通过R 2向放电端 C t 放电,使电路产生振荡。
电容C 在CC V 31和CC V 32之间充电和放电,其波形如图3所示。
输出信号的时间参数是T =t w1+t w2,t w1=0.7(R 1+R 2)C ,t w2=0.7R 2C555电路要求R 1 与R 2 均应大于或等于1K Ω ,但R 1+R 2应小于或等于3.3M Ω。
外部元件的稳定性决定了多谐振荡器的稳定性,555定时器配以少量的元件即可获得较高精度的振荡频率和具有较强的功率输出能力。
因此这种形式的多谐振荡器应用很广。
图3为所构成的电路.VCCOUTU14555_TIMER_RATEDGNDDIS RST THR CONTRI R1R2C CtU16B 74LS04D5321VCC 5V VCC图4 555 振荡电路外电路 图3 555输出特性3.1.2 电路仿真将图4所示的电路在电脑软件上连接,并进行仿真。
在仿真的过程中发现,555电路的低电平输出不稳定,波形出现失真的情况,在多次的仿真和查阅相关的资料后,得到了结解决的办法,就是在输出的后面加非门后在输出,通过仿真发现,加反向施密特反相器输出的波形稳定。
能够满足要求。
仿真结果如图5.图5 555振荡电路仿真波形 3.1.3元器件的选型和参数计算用555TIMER_RATED 作为主芯片,Ct 采用10nF.C 采用680nF.由以下三式可计算出电阻的值和振荡的频率:T =t w1+t w2,t w1=0.7(R 1+R 2)C ,tw2=0.7R2C由于占空比对电路的影响不大,可以忽略。