【CN109703757A】无人机旋翼系统【专利】
一种旋翼无人机的起落装置及其起落方法[发明专利]
![一种旋翼无人机的起落装置及其起落方法[发明专利]](https://img.taocdn.com/s3/m/3038808e1ed9ad51f01df2f2.png)
专利名称:一种旋翼无人机的起落装置及其起落方法专利类型:发明专利
发明人:申成利
申请号:CN201710435366.5
申请日:20170611
公开号:CN107054631A
公开日:
20170818
专利内容由知识产权出版社提供
摘要:本发明公开了一种旋翼无人机的起落装置,包括外筒,外筒内通过第一弹簧体活动套接有内筒,内筒底部连接有支撑架,外筒顶部环形排布有若干个通孔,通孔内活动插接有第一连接杆,第一连接杆顶部固定连接有挡风板,第一连接杆的内侧通过第一弹性伸缩体连接有第一楔形部,内筒外侧固定有与第一楔形部选择性接触的第二楔形部,第一连接杆的内侧固定有与内筒顶部选择性接触的限位板,限位板,第一连接杆的外侧套接有第二弹性伸缩体,第二弹性伸缩体的两端分别与挡风板和外筒连接。
本发明还公开了一种旋翼无人机的起落装置的起落方法。
本发明能够改进现有技术的不足,不使用油液缓冲结构,进一步降低了旋翼无人机的自重。
申请人:申成利
地址:644300 四川省宜宾市长宁县竹海路一段70号
国籍:CN
更多信息请下载全文后查看。
一种轻小型无人机旋转离心加速起飞装置[发明专利]
![一种轻小型无人机旋转离心加速起飞装置[发明专利]](https://img.taocdn.com/s3/m/667ca03203020740be1e650e52ea551810a6c9c3.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910243272.7(22)申请日 2019.03.28(71)申请人 河南机电职业学院地址 450000 河南省郑州市新郑市龙湖镇泰山路与郑新路交叉口西南角申请人 郑州亚柏智能科技有限公司 河南省柏盛无人机工程技术研究院有限公司(72)发明人 付毅峰 陈海峰 许智辉 岳艳阁 彭浩 马鹏博 张圆圆 伦丽 (74)专利代理机构 郑州锐科知识产权代理事务所(普通合伙) 41171代理人 王建平(51)Int.Cl.B64F 1/04(2006.01)(54)发明名称一种轻小型无人机旋转离心加速起飞装置(57)摘要本发明公开了一种轻小型无人机旋转离心加速起飞装置,包括动力机构、悬臂结构、刹车装置和释放装置,所述悬臂机构一端连接动力机构的输端,另一端连接释放装置,无人机通过下方设置有连接件用于固定在释放装置上;所述的动力机构包括箱式底座、电机、电源、离合器和控制器,所述电机竖直设置在箱式底座内,电机的输出轴连接离合器,离合器连接有转轴,所述转轴为中空的第一直管。
本发明通过第二直管的加速旋转,而后当第二直管外端部线速度达到或超过无人机最小飞行速度时将无人机释放起飞,将无人机加速的直线运动转变为旋转运动,对起飞场地要求低,可以再绝大多数场合作为轻小型无人机的起飞装置使用,方便灵活。
权利要求书1页 说明书4页 附图6页CN 109850176 A 2019.06.07C N 109850176A1.一种轻小型无人机旋转离心加速起飞装置,其特征在于:包括动力机构、悬臂结构、刹车装置和释放装置,所述悬臂机构一端连接动力机构的输端,另一端连接释放装置,无人机通过下方设置有连接件用于固定在释放装置上;所述的动力机构包括箱式底座、电机、电源、离合器和控制器,所述电机竖直设置在箱式底座内,电机的输出轴连接离合器,离合器连接有转轴,所述转轴为中空的第一直管,离合器上方的第一直管上设置有旋转连接器,第一直管上端穿出箱式底座与悬臂机构连接;所述的刹车装置设置在箱式底座上,所述的刹车装置包括设置在箱式底座上端面的安装座、电控液压刹车器、刹车钳和刹车碟,刹车钳安装在安装座内,刹车碟设置第一直管上,且刹车碟夹设在两刹车钳之间,电控液压刹车器与刹车钳通过刹车线连接;所述的悬臂结构为中空的第二直管,第二直管内端固定在第一直管上端部,第一直管和第二直管内部连通,第二直管外端固定有释放装置;所述的释放装置包括释放座,释放座上端面开设有V型缺口,沿V型缺口内侧壁设置有V 型槽,释放座上端紧邻直杆一侧设置有通孔,通孔内滑动设置有卡锁,卡锁紧邻直杆一侧设置有拉杆,通孔左端口设置有堵头,拉杆左端穿出堵头,通孔内的拉杆上套设有弹簧,拉杆另一端设置有椭圆环,拉动拉杆能够压缩弹簧移动卡锁,拉杆下方释放座侧壁上设置有舵机,舵机的摇臂外端与椭圆环滑动连接,舵机的摇臂外端能在椭圆环内滑动;所述的连接件为设置在无人机下端尾部的V型卡座,V型卡座与V型槽相适配,V型卡座侧边与通孔对应处设置有卡口,卡锁与卡口相适配;所述箱式底座内壁设置有转速传感器,转速传感器对准第一直管,所述旋转连接器内部定子固定在第一直管上,旋转连接器内部定子接线端与舵机的接线端通过导线连接,旋转连接器外端转子接线端通过导线与控制器连接,电机、电控液压刹车器、转速传感器也均通过导线连接控制器。
一种尾座式倾转旋翼垂直起降无人机[发明专利]
![一种尾座式倾转旋翼垂直起降无人机[发明专利]](https://img.taocdn.com/s3/m/99247951cbaedd3383c4bb4cf7ec4afe04a1b187.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910847843.8(22)申请日 2019.09.09(71)申请人 西安交通大学地址 710049 陕西省西安市碑林区咸宁西路28号(72)发明人 高忠权 韩鲁冰 高僖 黄佐华 (74)专利代理机构 西安智大知识产权代理事务所 61215代理人 王晶(51)Int.Cl.B64C 29/00(2006.01)B64C 27/22(2006.01)B64C 27/12(2006.01)B64C 5/06(2006.01)(54)发明名称一种尾座式倾转旋翼垂直起降无人机(57)摘要一种尾座式倾转旋翼垂直起降无人机,包括机身组件,机身组件左右对称安装有机翼,机身组件前端安装有机头罩组件,机翼组件的前缘设置有倾转旋翼动力机构,位于机身组件后方设置有尾翼,尾翼与机身组件垂直设置。
本发明采用倾转旋翼动力机构来提高无人机的灵活性,并提供无人机垂直起降和平飞的前进动力,采用飞翼布局降低飞行时的空气阻力,采用左右螺旋桨差速的方式控制无人机的偏航,采用副翼升降舵融合的方式简化无人机的结构。
具有灵活度较高,机动性较好,巡航阻力小,可靠性高的特点。
权利要求书1页 说明书4页 附图3页CN 110466754 A 2019.11.19C N 110466754A1.一种尾座式倾转旋翼垂直起降无人机,其特征在于,包括机身组件(101),所述的机身组件(101)左右对称安装有机翼(103),机身组件(101)前端安装有机头罩组件(102),机翼组件(103)的前缘设置有倾转旋翼动力机构(105),位于机身组件(101)后方设置有尾翼(104),尾翼(104)与机身组件(101)垂直设置。
2.根据权利要求1所述的一种尾座式倾转旋翼垂直起降无人机,其特征在于,所述的机身组件(101)包括与机翼组件(103)的连接的端面处设有第一定位孔(201),第二定位孔(202),方形加强管孔(203)和电气接口A(204);所述的机翼组件(103)包括机翼,机翼上表面侧面设置有与机身组件(101)连接处设有第一定位管(301),第二定位管(302),方形加强管(303),电气接口B(304),所述的机翼前方设置有支架固定孔(307),后方设置有舵面(305),舵面(305)与机翼连接处外侧设置有弹性撑杆(306)。
一种便携涵道式微小型单旋翼无人机的制作方法及专利技术
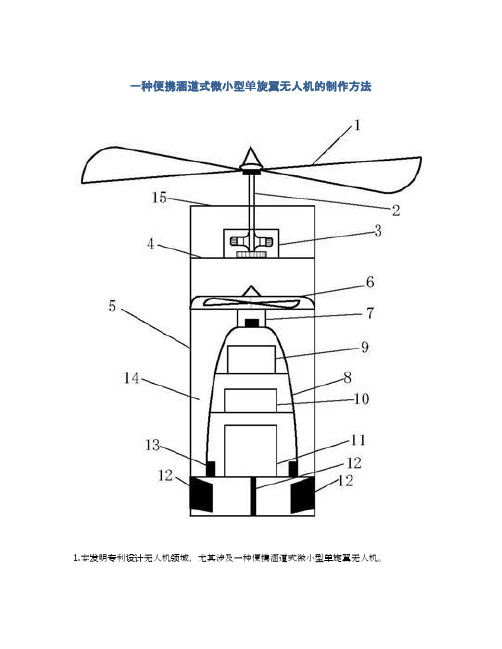
一种便携涵道式微小型单旋翼无人机的制作方法1.本发明专利设计无人机领域,尤其涉及一种便携涵道式微小型单旋翼无人机。
<b>背景技术:</b>2.随着无人机行业的迅速发展,无人机将会像相机一样进入普通消费者的日常生活、工作、娱乐中。
而以往四旋翼无人机都是固定式的机臂,产品体积较大,占空间,特别是薄而锋利的叶片在高速工作时更是让大多数人畏惧,产品没有亲和力;目前杯状无人机大都采用共轴双桨的结构,双桨存在的问题是:抗扰性、机动性差,无法满足高机动作战的需求,且双桨结构抗风性能差,无法满足多变的作战场景。
<b>技术实现要素:</b>3.本发明的目的在于提供一种便携涵道式微小型单旋翼无人机,该无人机可携带性、抗扰性、机动性更强,而且具有更加可靠的飞行特性。
4.实现本发明目的的技术解决方案为:一种便携涵道式微小型单旋翼无人机,包括单螺旋桨、动力传动杆和无人机外壳,无人机外壳内部安装有螺旋桨动力装置、第一固定板、小型涡轮、涡轮动力装置、无人机内置分层、飞行控制箱、传感器、电池、第二固定板、四个空气舵面以及相应的四个控制舵机、空气流通通道和进气口;所述单螺旋桨位于无人机外壳上方,安装于动力传动杆上端,且动力传动杆下端与螺旋桨动力装置相连接,所述螺旋桨动力装置安装在第一固定板上;所述小型涡轮在固定板的下方,小型涡轮下方安装有涡轮动力装置;所述无人机内置分层将小型涡轮以下第二固定板以上的空间隔离为内外两部分空间,其中外部空间为空气流通通道,内部空间依次安装飞行控制箱、各类传感器、电池和四个控制舵机,电池和四个控制舵机安装在第二固定板上;所述四个空气舵面安装于无人机底部,分别由四个控制舵机单独控制。
5.优选地,所述第一固定板,除了用于固定螺旋桨动力装置的部分,其余部分采用中空结构,便于气流的流通。
6.优选地,所述飞行控制箱内部装有无人机飞行控制器和自动驾驶仪。
7.优选地,所述无人机内置分层安装于整个无人机外壳的中间部分。
旋翼无人机姿态控制方法及系统[发明专利]
![旋翼无人机姿态控制方法及系统[发明专利]](https://img.taocdn.com/s3/m/6fd1e63926fff705cd170ade.png)
专利名称:旋翼无人机姿态控制方法及系统专利类型:发明专利
发明人:吴江
申请号:CN201710711307.6
申请日:20170818
公开号:CN109407684A
公开日:
20190301
专利内容由知识产权出版社提供
摘要:本发明涉及一种旋翼无人机姿态控制方法及系统,旋翼无人机姿态控制方法,其包括:判断旋翼无人机在支撑基面上处于第一姿态;启动偏置于旋翼无人机的重心第一侧的第一推力发生装置,第一推力发生装置产生方向背向支撑基面的推力,以使第一侧远离支撑基面运动以翻转旋翼无人机,旋翼无人机从第一姿态切换至第二姿态。
根据本发明实施例提供的旋翼无人机姿态控制方法,可以控制旋翼无人机在不同姿态之间进行切换,不再需要人为地去辅助调整旋翼无人机的当前姿态,因此提升了使用过程中的便利性以及体验满意度。
申请人:昊翔电能运动科技(昆山)有限公司
地址:215324 江苏省苏州市昆山市锦溪镇正崴路
国籍:CN
代理机构:北京东方亿思知识产权代理有限责任公司
代理人:娜拉
更多信息请下载全文后查看。
一种新型四旋翼无人机控制系统[发明专利]
![一种新型四旋翼无人机控制系统[发明专利]](https://img.taocdn.com/s3/m/4d61fd4a1611cc7931b765ce05087632311274fa.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201710627182.9(22)申请日 2017.07.28(71)申请人 北京航天光华电子技术有限公司地址 100854 北京市海淀区永定路51号(72)发明人 刘帆 张萌 李湛湛 陈丽 杨栋量 薛强 李少玲 宫巨涛 (74)专利代理机构 中国航天科技专利中心11009代理人 徐辉(51)Int.Cl.G05D 1/10(2006.01)(54)发明名称一种新型四旋翼无人机控制系统(57)摘要一种新型四旋翼无人机控制系统,其控制单元包括:机载部分和地面部分。
其中机载部分又分为飞控部分和云台部分:飞控部分由飞控模块、扩展功能模块、电源管理模块、指示灯模块、传感器模块、电调部分、电机部分、数传电台、遥控器接收机组成,云台部分由云台控制器、云台、相机、遥控器接收机、图传发射机组成。
地面部分由地面站、飞机遥控器、云台遥控器组成,其中地面站部分由计算机、图像采集卡、数传电台、图传接收机组成。
针对目前同类产品的不足之处,本控制系统具有控制精准、适应性强、稳定可靠等特点,能在不同机型使用。
具有航拍、自主导航飞行等功能,可以满足对电力巡检、边防巡检、农林植保等领域的作业需求。
权利要求书2页 说明书4页 附图4页CN 107272740 A 2017.10.20C N 107272740A1.一种新型四旋翼无人机控制系统,其特征在于,包括:机载部分和地面部分;机载部分包括飞控模块、扩展功能模块、电源管理模块、传感器模块、电调部分、电机部分、数传电台、遥控器接收机;传感器模块包括惯性测量单元、GPS、气压计、磁罗盘;惯性测量单元用于测量无人机的姿态及位置信息,并发送给扩展功能模块;GPS用于检测无人机的位置信息,并发送给扩展功能模块;气压计用于测量无人机所处位置的气压参数,并发送给飞控模块;磁罗盘用于测量无人机所处位置的磁场信息,并发送给扩展功能模块;数传电台用于通过天线接收地面站的控制指令并发送给飞控模块,发送无人机状态参数给地面站;遥控器接收机用于接收遥控器指令,并发送给飞控模块;电源管理模块:电源管理模块为无人机控制系统提供电源;电调部分,包括4个电子调速器,分别用于在飞控模块的控制下驱动一个电机工作;电机部分包括4个电机,分别控制一个旋翼的转速;扩展单元模块,由扩展单元模块的处理器获取GPS采集的无人机的位置信息和磁罗盘采集的无人机所处位置的磁场信息,并选择性地发送给飞控模块;接收惯性测量单元采集的姿态及位置信息;扩展单元模块进行姿态解算,并将结算后的姿态信息发送给飞控模块;飞控模块,接收扩展单元模块发送的位置和航向;通过数传模块接收地面站的控制指令,同时回传无人机状态参数给地面站;通过遥控器接收机接收遥控器指令;由飞控处理器进行数据融合与控制解算输出PWM控制信号给4个电子调速器;地面部分,接收飞控模块发送的无人机状态信息并显示,在自主控制模式下向飞控模块发送飞行指令。
【CN109703752A】双旋翼无人机【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910134310.5(22)申请日 2019.02.22(71)申请人 一飞智控(天津)科技有限公司地址 300457 天津市滨海新区经济技术开发区南海路156号通厂29号A区(72)发明人 鲁功平 孙涛 贾良现 (74)专利代理机构 天津创智天诚知识产权代理事务所(普通合伙) 12214代理人 周庆路(51)Int.Cl.B64C 27/08(2006.01)B64C 27/52(2006.01)B64C 1/06(2006.01)B64C 27/473(2006.01)(54)发明名称双旋翼无人机(57)摘要本发明公开了一种双旋翼无人机,包括机身、动力系统和旋翼系统,所述的动力系统包括两台固定在机身上的动力输出机构,与所述的动力输出机构传动连接的同步轴以及直升机减速装置;所述的直升机减速装置包括主箱体、可相对旋转地上下贯穿所述的主箱体的旋翼轴,固定套设在所述的旋翼轴上的锥齿轮,以及与所述的锥齿轮配合的锥齿轴,所述的锥齿轴的动力端与同步轴对应固定连接;本发明由一个并车减速机构实现两台发动机的并车,提高系统的总输出功率,两台发动机可以同时工作,也可以单独工作。
本发明的舵机驱动组件,倾斜盘组件及总距滑杆组件采用模块化设计,降低了结构的复杂度,使旋翼系统设计、调试和维护等操作简单化。
权利要求书2页 说明书13页 附图17页CN 109703752 A 2019.05.03C N 109703752A权 利 要 求 书1/2页CN 109703752 A1.一种双旋翼无人机,其特征在于,包括机身、动力系统和旋翼系统,所述的动力系统包括两台固定在机身上的动力输出机构,与所述的动力输出机构传动连接的同步轴以及直升机减速装置;所述的直升机减速装置包括主箱体、可相对旋转地上下贯穿所述的主箱体的旋翼轴,固定套设在所述的旋翼轴上的锥齿轮,以及与所述的锥齿轮配合的锥齿轴,所述的锥齿轴的动力端与同步轴对应固定连接;所述的旋翼系统包括直升机旋翼操纵装置和跷跷板式旋翼,所述的直升机旋翼操纵装置包括倾斜盘组件和总矩滑杆组件,所述的倾斜盘组件包括与倾斜盘,套装在所述的倾斜盘内的倾斜盘转动轴,所述的总矩滑杆组件包括总矩滑杆,长拉杆,设置在总矩滑杆下端的中心关节轴承,对应设置在长拉杆下端的侧关节轴承,所述的中心关节轴承和侧关节轴承的球头通过横连接杆与所述的倾斜盘转动轴固定连接;所述的跷跷板式旋翼包括桨毂组件和两个旋转对称的桨夹组件;所述的旋翼轴为管状,所述的总矩滑杆和长拉杆贯穿所述的旋翼轴且上端部与所述的桨夹组件对应传动连接。
一种旋翼武装无人机自动火控系统[发明专利]
![一种旋翼武装无人机自动火控系统[发明专利]](https://img.taocdn.com/s3/m/e395c080a98271fe900ef98d.png)
专利名称:一种旋翼武装无人机自动火控系统专利类型:发明专利
发明人:刘涛,康林,胡丹,罗晓黎
申请号:CN201710828919.3
申请日:20170914
公开号:CN107702593A
公开日:
20180216
专利内容由知识产权出版社提供
摘要:本发明公开了一种旋翼武装无人机自动火控系统,属于旋翼武装无人机领域,具体涉及旋翼武装无人机的武器瞄准射击控制。
旋翼武装无人机自动火控系统,包括蓄电池、电动云台、摄像头、测距仪、导航定位仪、处理器、瞄准角度控制装置。
电动云台上安装摄像头和测距仪,用来跟踪和测量目标,导航定位仪实时监视无人机飞行状态和参数,处理器计算出射角参数,并控制瞄准角度控制装置,控制武器瞄准目标。
自动火控系统结构简单、稳定可靠、反应敏捷,在旋翼武装无人机的武器瞄准速度和精度方面有显著的提升。
申请人:牟正芳
地址:415000 湖南省常德市人民西路龙昌花园
国籍:CN
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910133982.4
(22)申请日 2019.02.22
(71)申请人 一飞智控(天津)科技有限公司
地址 300457 天津市滨海新区经济技术开
发区南海路156号通厂29号A区
(72)发明人 刘帅 孙涛 贾良现
(74)专利代理机构 天津创智天诚知识产权代理
事务所(普通合伙) 12214
代理人 周庆路
(51)Int.Cl.
B64C 39/02(2006.01)
B64C 27/43(2006.01)
(54)发明名称
无人机旋翼系统
(57)摘要
本发明公开了一种无人机旋翼系统,包括直
升机旋翼操纵装置和跷跷板式旋翼,所述的直升
机旋翼操纵装置包括倾斜盘组件和总矩滑杆组
件,所述的倾斜盘组件包括与倾斜盘,所述的旋
翼轴为管状,所述的总矩滑杆和长拉杆贯穿所述
的旋翼轴且上端部与所述的桨夹组件对应传动
连接。
本发明的舵机驱动组件,倾斜盘组件及总
距滑杆组件采用模块化设计,降低了结构的复杂
度,使旋翼系统设计、调试和维护等操作简单化。
旋翼操纵系统的舵机驱动组件三个直线舵机并
列使用,提高空间利用率,
简化结构组成。
权利要求书1页 说明书8页 附图10页CN 109703757 A 2019.05.03
C N 109703757
A
权 利 要 求 书1/1页CN 109703757 A
1.一种无人机旋翼系统,其特征在于,包括直升机旋翼操纵装置和跷跷板式旋翼,
所述的直升机旋翼操纵装置包括倾斜盘组件和总矩滑杆组件,
所述的倾斜盘组件包括与倾斜盘,套装在所述的倾斜盘内的倾斜盘转动轴,所述的总矩滑杆组件包括总矩滑杆,长拉杆,设置在总矩滑杆下端的中心关节轴承,对应设置在长拉杆下端的侧关节轴承,所述的中心关节轴承和侧关节轴承的球头通过横连接杆与所述的倾斜盘转动轴固定连接;
所述的跷跷板式旋翼包括桨毂组件和两个旋转对称的桨夹组件;所述的桨毂组件为对称设计,其包括通过横向延伸的定位销轴与旋翼轴连接的桨毂定位块,通过两个纵向延伸的跷跷板定位销分别与所述的桨毂定位块连接的两个桨毂侧板,内端对应与所述的桨毂侧板通过螺栓固定连接的桨毂支臂,在所述的桨毂支臂上轴向定位地设置有桨夹定距环;
所述的旋翼轴为管状,所述的总矩滑杆和长拉杆贯穿所述的旋翼轴且上端部与所述的桨夹组件对应传动连接。
2.根据权利要求1所述的一种无人机旋翼系统,其特征在于:所述的桨夹组件包括桨夹和变矩臂,所述的桨夹包括与所述的桨毂支臂可旋转地配合连接的连接筒体,以及与所述的连接筒体一体形成或固定连接的桨板夹,所述的变矩臂与所述的连接筒体固定连接,所述的连接筒体和桨夹定距环通过螺栓固定连接实现其轴向固定。
3.根据权利要求1所述的一种无人机旋翼系统,其特征在于:所述的倾斜盘横滚方向和俯仰方向分别装有倾斜盘支臂,所述的倾斜盘支臂与所述的L型操纵臂的另一端铰接;所述的舵机驱动组件包括三个尾端与机体可旋转连接的直线舵机,三个与所述的直线舵机对应设置且一端与所述的直线舵机的输出端铰接且中部与机体可旋转连接的L型操纵臂。
4.根据权利要求1所述的一种无人机旋翼系统,其特征在于:所述的倾斜盘转动轴上端设置有U型连接耳,所述的中心关节轴承的球头定位在连接耳内部,所述的侧关节轴承定位在连接耳两侧。
5.根据权利要求1所述的一种无人机旋翼系统,其特征在于:所述的总矩滑杆下端设置有将两长拉杆遮护其中的侧板,在所述的侧板内侧设置有用于垂直导向所述的长拉杆的导向部。
6.根据权利要求1所述的一种无人机旋翼系统,其特征在于:在所述的两个桨毂侧板间固定有挥舞限位块,在所述的旋翼轴上对应套设有聚氨酯衬套。
7.根据权利要求1所述的一种无人机旋翼系统,其特征在于:所述的总矩滑杆上端通过关节轴承连接蝶形件,所述的蝶形件两侧通过关节轴承与所述的长拉杆上端连接。
8.根据权利要求1所述的一种无人机旋翼系统,其特征在于:在桨夹连接筒体开口端与所述的桨毂支臂间设置有密封轴承。
9.根据权利要求1所述的一种无人机旋翼系统,其特征在于:所述的桨板夹包括内侧螺栓固定连接和外侧螺栓以调节桨叶在摆阵方向的角度,桨毂支臂具有1.75°的预锥角以将两片桨叶上翘1.75°。
10.根据权利要求1所述的一种无人机旋翼系统,其特征在于:在旋翼轴上下两端分别通过螺栓连接固定联动杆限位块,桨毂定位块和旋翼轴间为过盈装配。
2。