基于视觉传感的多层多道焊缝图像特征的识别
基于视觉传感器的相贯线焊缝特征提取方法

基于视觉传感器的相贯线焊缝特征提取方法
相贯线焊缝是一种重要的连接方式,在许多工业应用中得到广泛应用。
为了保证焊缝的质量,需要对焊缝进行检测和分析。
本文提出了一种基于视觉传感器的相贯线焊缝特征提取方法。
首先,通过视觉传感器获取焊缝图像。
然后,对图像进行预处理,包括去噪、二值化和边缘检测等操作,以得到焊缝的轮廓。
接着,通过多边形逼近算法对轮廓曲线进行拟合,得到焊缝的几何特征,如长度、宽度、面积等。
在得到焊缝的几何特征后,可以进一步提取焊缝的纹理特征。
本文采用局部二值模式(LBP)算法对焊缝图像进行处理,以获取焊缝的纹理特征。
通过LBP算法,可以得到焊缝图像的纹理模式,并用直方图对其进行描述,以得到焊缝的纹理特征。
最后,将焊缝的几何特征和纹理特征结合起来,用支持向量机(SVM)进行分类,以进行焊缝的缺陷检测。
实验结果表明,本文提出的方法可以有效地提取焊缝的特征,并在焊缝缺陷检测中取得了良好的效果。
基于激光视觉的多层多道焊接坡口特征点提取方法

基于激光视觉的多层多道焊接坡口特征点提取方法
顾帆;陈华斌;何银水;陈善本
【期刊名称】《上海交通大学学报》
【年(卷),期】2016()S1
【摘要】多层多道自适应焊接一直是实现中厚板焊接自动化的难点.文章研究了多层多道焊焊接坡口特征点提取方法,通过对焊接坡口激光条纹图像特征分析,首先采用中值滤波去除图像噪声,利用阈值分割和重心法提取激光条纹中心线,然后经过中心线拟合直线求交点和逐列搜索对比获取焊接坡口轮廓的四个拐点,为后续多层多道自适应焊接提供了可行性技术途径.
【总页数】4页(P62-65)
【关键词】多层多道焊接;特征提取;图像处理;激光视觉
【作者】顾帆;陈华斌;何银水;陈善本
【作者单位】上海交通大学材料科学与工程学院
【正文语种】中文
【中图分类】TG409
【相关文献】
1.中厚板V形坡口多层多道焊机器人焊接技术研究 [J], 成利强;王天琪;侯仰强;郑佳;杨壮
2.基于视觉成像的机器人中厚板多层多道焊接技术 [J], 李帅
3.焊缝余高对复合型坡口X80管线钢多层多道焊接残余应力的影响 [J], 刘成;尹立
孟;姚宗湘;王刚;王学军
4.基于视觉成像的机器人中厚板多层多道焊接技术 [J], 李帅;
5.基于激光视觉系统的多层多道焊接路径规划 [J], 潘海鸿;李睿亮;刘冠良;王耀玮;陈琳;梁旭斌
因版权原因,仅展示原文概要,查看原文内容请购买。
《基于机器视觉的直缝焊管焊缝位置识别研究与应用》

《基于机器视觉的直缝焊管焊缝位置识别研究与应用》篇一一、引言在工业生产过程中,直缝焊管作为一种重要的管道产品,其生产过程中的质量控制显得尤为重要。
焊缝位置识别的准确性和效率直接影响到直缝焊管的生产效率和产品质量。
随着科技的发展,基于机器视觉的焊缝位置识别技术应运而生,并在实际生产中取得了显著的成果。
本文将探讨基于机器视觉的直缝焊管焊缝位置识别技术的研究与应用。
二、直缝焊管焊缝位置识别的现状目前,直缝焊管的生产过程中,焊缝位置识别主要依赖于人工或传统的视觉检测方法。
然而,这些方法存在诸多问题,如效率低下、精度不高、易受人为因素影响等。
因此,研究一种高效、准确的焊缝位置识别方法显得尤为重要。
三、基于机器视觉的直缝焊管焊缝位置识别技术(一)技术原理基于机器视觉的直缝焊管焊缝位置识别技术主要利用图像处理和模式识别技术,对直缝焊管图像进行采集、处理和分析,从而实现对焊缝位置的准确识别。
该技术通过分析图像中的颜色、形状、尺寸等特征,提取出焊缝的特征信息,进而实现对焊缝位置的定位和识别。
(二)技术优势相比传统的视觉检测方法,基于机器视觉的直缝焊管焊缝位置识别技术具有以下优势:一是提高了检测效率,减少了人工干预;二是提高了检测精度,降低了误检和漏检的概率;三是具有较高的自动化程度,可实现实时在线检测。
四、技术应用与实现(一)图像采集与预处理在基于机器视觉的直缝焊管焊缝位置识别系统中,首先需要对直缝焊管进行图像采集。
通过高分辨率摄像头对直缝焊管进行多角度、多方位的图像采集,获取到清晰的焊缝图像。
然后,对采集到的图像进行预处理,如去噪、二值化等操作,以提高图像的质量和特征提取的准确性。
(二)特征提取与识别在完成图像预处理后,系统开始进行特征提取与识别。
通过分析图像中的颜色、形状、尺寸等特征,提取出焊缝的特征信息。
然后,利用模式识别技术对提取出的特征信息进行分类和识别,实现对焊缝位置的准确判断。
(三)系统集成与应用将特征提取与识别的结果输出到控制系统,实现对直缝焊管生产过程的实时监控和控制。
基于机器视觉的焊缝表面缺陷图像智能识别机制

采用机器学习算法,如支持向量机(SVM)、随机森林(RF )等,对缺陷特征进行学习和分类,实现缺陷识别。
04
基于机器视觉的焊缝表面 缺陷图像预处理
图像增强
01
02
03
对比度增强
通过调整图像的对比度, 提高缺陷与背景之间的差 异,使缺陷更加突出。
锐化处理
通过滤波器增强图像边缘 ,使缺陷的轮廓更加清晰 。
02
机器视觉技术概述
机器视觉系统的基本构成
照明系统
提供合适的光源,使待检测物体表面 有足够的对比度,同时满足摄像机对 光照条件的要求。
01
02
摄像机
将光学图像转换为电子图像,通常使 用高分辨率、高帧率的工业相机。
03
镜头
选择合适的镜头,确保拍摄的图像清 晰度高、畸变小。
计算机
运行图像处理软件,对采集到的图像 进行分析和处理。
基于机器视觉的焊 缝表面缺陷图像智 能识别机制
汇报人: 日期:
目录
• 引言 • 机器视觉技术概述 • 焊缝表面缺陷类型及特征分析 • 基于机器视觉的焊缝表面缺陷图像预处理 • 基于机器视觉的焊缝表面缺陷图像识别机制
目录
• 基于机器视觉的焊缝表面缺陷图像识别实验及结 果分析
• 基于机器视觉的焊缝表面缺陷图像智能识别机制 优化及展望
常用图像处理算法简介
傅里叶变换
将时域信号转换为频域信号,用于图 像去噪、特征提取等。
小波变换
将图像分解成多个频段,用于图像压 缩、去噪等。
边缘检测
识别图像边缘,用于缺陷检测、形状 识别等。
形态学运算
对二值图像进行膨胀、腐蚀等操作, 用于去除噪声、连接断开的边缘等。
基于焊缝特征的焊接路径视觉辨识方法研究
基于焊缝特征的焊接路径视觉辨识方法研究张国强荆炀(甘肃省特种设备检验检测研究院)摘要针对埋弧多层焊焊接路径规划在线示教引导方法,由于厚板结构热输入量大,焊接过程中发生板件翘曲变形时无法对示教路线进行实时调整的问题,提出一种中厚板多层多道焊焊缝轮廓获取方法及焊接路径规划策略。
搭建了双目立体视觉系统,通过标定、图像校正及滤波等预处理,得到焊缝轮廓特征点三维坐标;通过立体匹配和三维坐标重构得到焊缝轮廓的三维图像;通过对焊缝轮廓表面形貌的分析,针对不同形貌的焊缝特征提出不同的焊接路径规划策略,得到空间三维路径曲线,规划的焊接路径与焊缝特征保持了良好的对应关系。
通过提供的焊缝路径三维坐标为焊枪位姿的实时对中和调整提供了基础数据。
关键词埋弧焊多层多道焊焊接路径双目立体视觉路径规划智能化中图分类号TG441.7文献标识码A文章编号1000-3932(2020)06-0497-06厚板结构多层多道焊在高压容器、船舶等领域广泛应用。
目前厚板结构焊接主要采用埋弧自动焊,但其焊接过程需要人工观察焊枪与坡口或焊道走向,并实时调整焊枪与之对中。
多层多道焊焊接路径的自动识别与规划是实现埋弧焊焊接厚板结构智能化的关键,也是埋弧焊机器人的关键技术。
对于埋弧多层焊焊接路径的规划,—般采用在线示教引导的方法,但在焊接过程中由于厚板结构热输入量大,焊接过程中如果发生板件翘曲变形就无法对示教路线进行实时调整。
机器视觉技术因具有非接触、精度高等优点被广泛应用于测量、跟踪等领域,为焊接路径的获取提供了技术支撑$匕张华军等采用激光条纹获取焊接轮廓特征点的方法,通过焊缝轮廓特征点信息对焊接路径、弧长控制和焊接工艺参数进行调整[2]o张鹏贤等采用单目视觉加激光条纹的方法,对长输管道组对间隙量和错边量进行激光视觉检测;通过双目立体视觉系统建立焊缝轮廓的三维重构图,完成焊宽、余高和填充度的评价$&,'%"笔者通过双目立体视觉系统提取多层多道焊焊缝轮廓,根据焊缝轮廓表面特征信息提出相应的路径规划策略,并通过对获取离散点的拟合给出了一道焊和多道焊的焊接三维路径曲线。
基于视觉传感的焊缝识别方法的研究
维普资讯
研 究 探 讨
幅图像对应位置为系统齐焦位置。
2 摄 像 系统 的标 定
一
国
本系统采用垂直测量方案,即 C D摄像机光轴与工 C 件表面垂直, 不存在角度的问题 。该方案属于二维平面测 量 ,满足针孔模型 ,像尺寸只与物尺寸相差一个 比例系
数, 即系 统 当量 对应值。 K LL =/ () 2 式 中 : 为刻线 A 曰的 实 际长度 , 为 A 曰在 图像 中的
网
瓣
l
・
自■■i嗣■圈自目 ■■ 霸 自 g 糍
图 3 中 值 滤 波 后 的 焊缝 图像
3J 中值 滤 波 。
现场采集 的焊缝 图像含有大量的干扰噪声 ,为了增 强图像 中的特征线 , 使背景色和特征线容易区别 , 要对所 处理的图像进行滤波处理 。中值滤波是一种非线形的图 像局部平滑处理方法 ,它对脉冲干扰和椒盐噪声 的抑制 效果比较好 ,而且在消除噪声的同时还能保持 图像中的
的两个像素点, 计算 出刻线在图像中的( 像素 ) 长度 。
3 焊缝 特 征的 提取
择 方法 一 T U法 。主 要原 理 如下 : OS
设一幅图像的灰度值为 1m级 ,灰度值为 i ~ 的像素 为 n 此时得 到总像素数 : = ‰ 各灰度 概率 : = / , Ⅳ p nN, 然后用 k将其分成两组 C= 1| 和 C=| 1m)各组产 o(~ ) 。 j ~ , j } (+ } 生的概率如下 :。 C 产生的概率 w= P | o 。 () = j } C 产生的概率 。 p= 一 ( ) 。 = 1w k C 的平均值 o C 的平均值 - - = /o w= /- w: 、
细节 部分 , 防止 边 界模 糊 。 图2 为原始 图像 ,图 3 以 3 3 为 x 模板 中值滤波后的
基于结构光视觉传感的焊缝视觉信息检测和识别研究
4 结
论
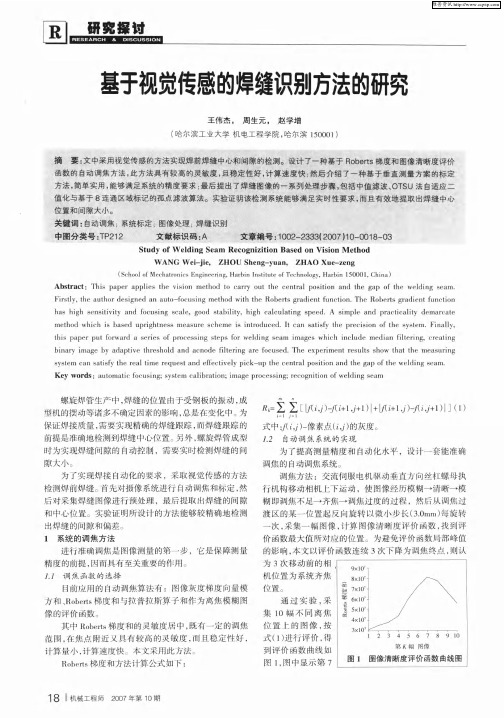
焊缝的图像预处理及视觉信息检测和识别用 V i s — u a l C+ + 6 . 0编 程 实 现 , 在 Wi n d o w s X P操 作 系 统 下 , C P U为主频 2 . 4 G , 内存为 2 5 6 M, 对图像大小为 4 9 8 × 1 8 8 象素进行处理 , 图像预处理平均时间约为 6 3 m s , 对
中的点 1 , 数 组的最后一点对应 于图 6 a中的 点 3 。 比
较数组纵坐标 y 值 的大小 , 具有纵坐标最 大值 的点就
是点 2 , 从 而找 到 了 点 2 。图 6 b是 图 6 a按 照 上述 检 测
算法识别的结果 , 图中用符号“ l ” 标识 。 3 . 3 V形 和 U形坡 口的检测 和识 别
图6 内 角 接 接 头 不 意 图及 位 置 检 测
点3 , 这样就找到了点 1 、 点 3和点 5 。运用斜率截距分
析 的方 法 来 检 测 焊缝 点 2和 点 4 。连 接 点 1和 点 3构
一
成一直线 , 直线 1 3的斜率为 : k , =
, 过点 1 和点
3 一 1
图7 a是 V形 坡 口焊缝 图像 预处 理 后示 意 图 , V形 坡 口焊缝 检测 和识 别就 是 要确 定 图 中点 1 、 2、 3 、 4 、 5的
图7 V形坡 口示意 图及位置检测
位置坐标。运用探测搜索法获取条形光上每一点 的二 维坐标信息 , 存人一个二维数组 中, 设焊缝轮廓线点集 为p ( x 。 , Y ) , 1 , 2 , ……, n , 起始 点 对应 于 图 7 a中 的 点1 , 点集的最后一点对应于图 7 a中的点 5 , 依次 比较 数 组纵坐标y 值 的大小 , 具有 纵坐标最 大值 的点就 是
《基于机器视觉的直缝焊管焊缝位置识别研究与应用》
《基于机器视觉的直缝焊管焊缝位置识别研究与应用》篇一一、引言随着工业自动化和智能制造的快速发展,机器视觉技术在工业生产线上得到了广泛应用。
直缝焊管作为工业生产中的重要产品,其生产过程中的焊缝位置识别对于提高生产效率和产品质量具有重要意义。
本文旨在研究基于机器视觉的直缝焊管焊缝位置识别技术,并探讨其在实际应用中的效果。
二、直缝焊管焊缝位置识别的技术背景直缝焊管焊缝位置识别是工业生产中的重要环节,传统的方法主要依靠人工观察和操作,不仅效率低下,而且易受人为因素影响。
随着机器视觉技术的发展,利用计算机视觉技术对焊缝位置进行自动识别成为可能。
机器视觉技术通过图像处理和模式识别等方法,实现对焊缝位置的快速、准确识别。
三、基于机器视觉的直缝焊管焊缝位置识别技术研究1. 图像采集与预处理首先,通过工业相机等设备采集直缝焊管的图像。
由于环境光线的变化、图像噪声等因素的影响,需要对采集到的图像进行预处理,如去噪、二值化、边缘检测等,以提高图像的质量和后续识别的准确性。
2. 特征提取与匹配通过图像处理技术提取焊缝的特地理位置:。
当从特定视角的工业相机中拍摄图像时,可能直接提取的特征与焊接几何无关的信息更为简单;此外,这些特定点、线和面的形态也富含几何形状的信息。
为增加此类信息量的可靠性与使用率,一些更为高级的技术例如多角度视角或者高精度的扫描方式可被采纳来捕获更为精确的信息。
在此阶段,也需要根据具体情况和要求设计适当的算法对特征进行匹配。
3. 深度学习算法的应用近年来,深度学习算法在图像识别领域取得了显著的成果。
将深度学习算法应用于直缝焊管焊缝位置识别中,可以提高识别的准确性和鲁棒性。
通过训练大量的直缝焊管图像数据,让算法学习到焊缝的形状、位置等特征,从而实现对焊缝位置的自动识别。
四、应用实践与效果分析1. 实际应用场景基于机器视觉的直缝焊管焊缝位置识别技术已广泛应用于直缝焊管生产线中。
通过将该技术集成到自动化生产线上,实现了对焊缝位置的自动识别和定位,提高了生产效率和产品质量。
基于视觉成像的机器人中厚板多层多道焊接技术
2018年9月25日第2卷第9期现代信息科技Modern Information TechnologySep.2018 Vol.2 No.9基于视觉成像的机器人中厚板多层多道焊接技术李帅(中国船舶重工集团有限公司第七一六研究所 机器人事业部,江苏 连云港 222000)摘 要:大型船舶或桥梁的小组立或者中组立的建造过程中需要有大量的肋骨(T 型材)焊接的工作,本文设计了一套基于六自由度的焊接机器人,末端搭载携带线激光成像设备,通过铺设轨道在T 型材上进行移动。
基于线激光扫描成像,重构焊道并在线规划焊接路径,结合焊接数据库进行匹配,实现了T 型材对口的多层多道自动化连续。
关键词:中厚板;线激光扫描成像;焊道重构;T 型材;多层多道焊接中图分类号:TP242;TG409文献标识码:A文章编号:2096-4706(2018)09-0169-05Multi-layer and Multi-channel Welding Technology for Robot Plate Basedon Vision ImagingLI Shuai(Robotics Division ,716 Research Institute ,China Shipbuilding Industry Group Co.,Ltd.,Lianyungang 222000,China )Abstract :A large group of ships or bridges needs a large number of ribs (T profiles )to be welded during the construction process.A set of six degrees of freedom welding robot is designed in this paper. The terminal carrying line laser imaging equipment is used to move on the T profile by laying the track. Based on line laser scanning and imaging ,welding path reconstructing and planning online ,the multi-layer and multi-channel automation of the T profile is realized with welding database matching.Keywords :plate ;line laser scanning imaging ;bead reconstruction ;T profile ;multi-layer and multi-channel welding收稿日期:2018-08-060 引 言大型船舶或桥梁的小组立或者中组立的建造过程中需要有大量的肋骨(T 型材)焊接的工作,国内有相关机构研究过船舶分段建造过程中的机器人焊接问题[1-3],也有高校研究钢结构的格子间的机器人焊接问题[4],以及国外的inrotech 等公司,都推出了舱室焊接的机器人产品,但是都没有在实际应用中解决T 型材的多层多道的焊接问题,并设计制造出相应的产品。
基于视觉的焊接工件在线识别与分类算法研究
基于视觉的焊接工件在线识别与分类算法研究作者:李春李琳邹焱飚曾亮华来源:《价值工程》2016年第04期摘要:为提高焊接机器人的生产效率,设计了eye-in-hand焊接机器人视觉系统,提出了基于机器视觉的焊接工件自动化识别与分类算法。
根据工件特征,提取区域面积、凸性、圆度、小孔数目、外接圆面积比等几何特征和几何距作为分类器的训练数据输入量,完成分类器的训练。
设计高斯混合模型、多层感知神经网络和支持向量机分类器,完成对不同焊接工件的分类和识别。
实验结果表明,该算法响应速度快,且当工件位置、大小、角度都存在变化时,仍能快速准确地对工件进行分类,满足生产线上对实时性的要求。
Abstract: In order to increase the productivity efficiency of the welding robot, eye-in-hand welding robot vision system is designed, the automatic recognition and classification algorithms of the welding machine on the basic of machine vision is put forward. According to the properties of the weldment, the area, convexity, roundness, number of holes, circumscribed circle area ratio and other geometric features and geometric distance are used as the training data input of the classifier to train the classifiers. The Gaussian mixture model and the vector machine classifier of multi-layered perception neural networks and support are used to classify and recognize the weldment. The experiments show that the algorithms responds fast and it is able to recognize the weldment when their size and angle are changing, and it can quickly and accurately classify the artifacts and meet the requirements of the production line in real-time.关键词:机器视觉;特征提取;GMM模型;MLP神经网络;SVM分类器Key words: machine vision;feature extraction;Gaussian Mixture Model(GMM);multilayer perceptron neural network(MLP);support vector machine (SVM)中图分类号:TP391.4 文献标识码:A 文章编号:1006-4311(2016)04-0097-050 引言当前焊接机器人已经在汽车生产、工程机械、造船业以及集装箱生产等许多领域得到了应用,焊接机器人通常采用示教再现[1]工作模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
poes gapoc hrce z rgl e i roei po oe , hc a eue et tec aatr t s f ut— rcsi p r ht c a trei eua w l n gov s r sd w i cnb sdt i ni h h r e sc l n a o a i r r dg p h od  ̄ c i i om i
LIXin —x XI a i ONG e —y Zh n u
( aca gH n kn n e i ,N nhn J nx 30 6 ,hn ) N nh n ag ogU i rt v sy a cag, i g i 3 0 3 C i a a
Ke y wor ds:m ut p s l i g;l s rv s a e o ; i li— a s we d n a e iu ls ns r mag o esi g e prc sn
pa swedi e m . Th e e o d i a oc s i g p o e u e st r s l o esi g,i g e o sng,i a ec ntri e e ta t s l ngs a e d v lpe m gepr e sn r c d r s i h e hod prc sn ma e d n ii m g e e ln xr ci on,
出了适用于非规 则坡 口的焊缝 图形处理方法 。经过 阈值处 理 、 图像 去噪 、 图像 中心线提取 以及直线 拟合 、 特征 点的识 别等处
理 流 程 , 自动 识 别 多 层 多 道 焊 缝 的特 征 点 。 可 [ 图分 类 号 ]T 4 中 G4 [ 献标志码 ]A 文 [ 章 编 号 ] 10 4 2 (0 1 O — 0 3~ 5 文 0 1— 9 6 2 1 ) 1 0 5 0
sr ih —l e f t g a d t e fau e p i ti e t yn .T e p o o e ee t g s se c n p o i e t e a c r t in l o e m r c — t g t i i i n h e t r o n d n i i g h r p s d d tc i y t m a rv d h c u ae s a f rs a ta k a n tn f n g ig n ,whc s t me d u l in f a tt mp o e t e wed n u l y a d a tma iain frt i k p ae e dn . ih i r e n o s s i c n o i r v h li g q a i n u o t t h c lts w l i g y g i t z o o
2 1 年3月 01 第2 5卷 第 1期
南昌航空大学学报 ( 自然科学 版) J RN NC OU AL0FNA HAN ANG NG UNVE IY( T AL S INC S) GH KO I RST NA UR CE E
M r 0’ a 21 V l 5 N o 2 O 1
cu l e i )v u l e sr spee td y a a z gtec aat i i f h a eo ut—p s e srs ie ,a g o p d d v e i a s no rsne .B n yi h rce s c o tei g f l e c s i l n h rts m m i a s l l e t p s n i e w da r ma
I e i c to f I a e Cha a t r o uli— p s e di g d ntf a i n o m g i r ce sf rMng e m Ba e n Vii n S n i
。
基 于 视 觉 传 感 的 多 层 多 道 焊 缝 图 像 特 征 的 识 别
黎 成 西 熊震 宇
( 昌航 空大学 , 南 江西 南昌 306 ) 3 0 3
[ 键 词 ] 层 多 道 焊 ; 光 视 觉 传 感 器 ; 像 处 理 关 多 激 图
[ 摘
要] 建立 了基于条形激光 的 C D视 觉传 感多层多道焊缝 自动检 测系统。通过对多道焊缝激 光条 纹图像特征的分析 , C 提
大型 厚 板 在 船 舶 、 压 容 器 等 领 域 广 泛 应 用 。 量精 度 高 、 电磁 场 干扰 能力 强 以及 与 工 件 无 接触 高 抗 厚板 结构 一般 采用 多层 多道 焊 , 焊接 过 程 中厚 板 等优 点 。采用 视 觉 传 感 系统 实 现焊 缝 跟 踪 , 关 键 在 最 焊 接结构 容 易产 生 较 大 的 变形 , 重 影 响厚 板 焊 接 的是 能对 传 感 器 摄 取 到 的 图像 进 行 准 确 的 图像 处 严 质量 和 自动化 的实 现 。 因此 , 厚 板 多 层 多 道 焊 的 理 , 于 多层 多道 焊 图像 处 理来 说 , 对 对 关键 是能 准 确 的 焊缝 跟踪 的研 究 是 非 常 有 意 义 的 。 目前 , 于 焊 缝 识 别 拐角 跟踪 点 的位置 。没有 足够 精度 的拐 角 跟踪 用 就 】] - 跟踪 的传感 器有 接触 传感 器 、 电弧 传感 器 、 电磁 传 感 点 的识 别 , 谈 不 上 焊缝 的 自动 跟 踪 _ 2。但 目前
Ab ta t sr c :Anef in uo t eet n ss m o l —p s edn e m rfep rmeesb sdo a dlsr D( h re— f ce t tmai d tci yt fr i a c o e mut a sw ligs a p o l aa tr ae nb n ae i i CC c ag