基于Blob算法的机器视觉图像识别方法的研究
Cognex调研
VisionPro的两层软件架构便于建立原型和集成。交互层利用拖放工具盒ActiveX控件以加速应用系统的开发,在程序层,将原型应用开发成用户解放方案。基于COM/ActiveX技术使VisionPro应用系统易于集成第三方应用程序(如图形函数),而且为整个机器(例如IO,计算机控制,工厂通信)提供了基于Com空间应用的易于集成性。
2)预处理
a)点对点处理
数学运算:加、减、乘、整数除、浮点除、反色、取绝对值、拷贝图像
逻辑运算:与、或、非、与非、或非、异或
手动或自动阈值(二值化,裁剪)
设置缓冲区为一个常数
比较(最大值,最小值)
平移
查找表(LUT)映射
帧平均处理
b)统计学运算
生成灰度直方图
查找最小/最大像素值
定位常像素值
计算两幅图像异同
=
可见,外参数有多种不同的表示方式,或者说不同的模型,从而也对应这不同的求解算法,同样,相机本身(内参数)也有多种模型,一般分为线性模型和非线性模型,线性模型一般是指经典的小孔模型,如下是所示,共有5个参数,分别是图像在u轴和v轴上的尺寸因子fu和fv,主点坐标u0和v0,畸变因子s。
非线性模型可以表示成线性模型加上非线性畸变值,如下式所示,其中,δ为非线性畸变值,共有8个参数,径向畸变因子k1,k2,k3,k4,薄棱镜畸变因子p1,p2和离心畸变因子s1,s2。非线性模型也有很多种,具体模型与考虑的因素以及模型假设有关。对应于内参数的建模及求解已经有了许多相关的研究,本文并不关心具体的模型或算法,而只从软件设计的角度对相机标定进行研究。
PMAlign图片训练模式掩模方法示意图
PMAlign工具在图像中寻找特征准确度主要是通过粒度(或者说间隔尺寸)来控制的。粒度可以这样理解,它是用来表示感兴趣的区域半径大小,单位是像素。如果粒度小的话,在进行特征检测时,就可以检测得更加细致一点,反之亦然。在实际应用中,一个特征可以表现为小的粒度或者大的粒度,在检测大特征的时候,PMAlign工具使用较大的粒度,而检测小特征时,PMAlign工具则使用较小的。PMAlign工具使用一个范围的粒度在图像中训练样本,他会自动决定出一个最优的粒度设置,如下图所示,粒度越小,寻找到的样本特征就越多。
基于机器视觉的气象图像识别算法研究

基于机器视觉的气象图像识别算法研究机器视觉是一门研究如何使机器能够模拟人类视觉感知能力的学科。
随着计算机技术的进步和图像处理算法的发展,基于机器视觉的气象图像识别算法在气象领域中得到了广泛的应用。
本文将对基于机器视觉的气象图像识别算法进行研究,并探讨其在气象预测和灾害预警等方面的应用。
首先,我们需要了解机器视觉的基本原理。
机器视觉是通过摄像头或其他图像采集设备获取图像信息,然后通过图像处理算法对图像进行分析和理解。
图像处理算法包括图像增强、图像分割、特征提取和目标识别等步骤。
其中,特征提取是机器视觉中的关键步骤,它通过提取图像中的特定特征来描述和区分不同的物体或场景。
在气象图像识别中,机器视觉的应用主要集中在以下几个方面:1. 气象云识别:通过机器视觉技术,可以自动识别气象云的类型和特征。
根据云的形状、纹理和颜色等特征,可以判断云的类型是积云、层云还是卷云,并进一步预测天气变化。
这对于气象预测和飞行安全都具有重要意义。
2. 气象雷达图像分析:气象雷达可以通过发送和接收回波信号来探测降水强度和降水类型等信息。
机器视觉可以对雷达图像进行分析,提取雷达回波的特征,如强度、反射率和扩散度等,并进行降水识别和降水量估算。
这对于气象预警和水资源管理等方面具有重要意义。
3. 气象卫星图像解译:卫星图像是气象领域中常用的数据来源。
通过机器视觉技术可以对卫星图像进行解译,提取出地表温度、云量、雨量等信息,用于气象数据分析和大气环流模拟。
这对于气候研究和气象灾害预警具有重要意义。
以上只是基于机器视觉的气象图像识别算法在气象领域中的一些应用,实际上还有许多其他的应用方面。
为了提高算法的性能和准确性,研究者们正在不断改进和创新机器视觉算法。
例如,深度学习算法在图像识别方面取得了巨大的突破,通过构建深层神经网络,可以实现更精确的目标识别和分类。
此外,基于机器视觉的气象图像识别算法还面临一些挑战,如光照变化、云雾遮挡和图像模糊等。
基于计算机视觉的图像内容识别与分类算法研究

基于计算机视觉的图像内容识别与分类算法研究近年来,随着计算机视觉技术的快速发展,图像内容识别与分类算法在许多领域拥有广泛的应用前景。
本文将探讨基于计算机视觉的图像内容识别与分类算法的研究。
首先,我们需要了解计算机视觉技术的基本原理。
计算机视觉是指让计算机通过图像、视频等各种视觉数据,模拟人类视觉系统的能力,实现对视觉信息的理解和处理。
图像内容识别与分类算法正是计算机视觉技术的一种应用。
在图像内容识别与分类算法的研究中,最常用的方法是使用深度学习技术。
深度学习通过构建多层神经网络模型,可以自动从大规模的图像数据中学习特征,并且进行高效的图像识别和分类。
这种方法不需要人工提取特征,而是通过训练模型来学习图像的特征表示,大大提高了图像内容识别和分类的准确率。
另一个重要的技术是卷积神经网络(Convolutional Neural Network,简称CNN)。
CNN是一种特别适合处理图像数据的神经网络结构,它可以自动提取图像的局部特征,并通过层层叠加的结构获得图像的全局特征。
CNN的优势在于能够处理大量的图像数据,并且能够保留图像的空间结构信息,从而提高了图像内容识别和分类的精度。
在具体的图像内容识别与分类算法中,还需要考虑到一些实际问题和挑战。
首先是数据集的选择和构建。
为了得到准确的分类结果,需要构建大规模的训练数据集,并且保证数据集的多样性和代表性。
此外,还需要解决图像数据的标注问题,即需要为每个图像提供正确的标签,以便进行监督学习。
另一个挑战是算法的有效性和效率。
随着图像数据规模的不断增大,如何提高算法的运行速度和内存占用成为一个重要问题。
一种常见的方法是使用GPU并行计算技术,通过同时处理多个图像数据,提高了算法的效率。
此外,还可以采用模型压缩和模型量化等技术,减少模型参数的数量,从而降低了算法的内存占用和计算复杂度。
除了基于深度学习的算法,还有其他一些方法用于图像内容识别和分类。
例如,使用传统的机器学习算法如支持向量机(Support Vector Machine,简称SVM)和随机森林(Random Forest)等,来提取图像的特征并进行分类。
基于深度学习的图像识别技术研究与应用

安全监控系统
人脸识别
深度学习算法能够自动识别监控视频中的人脸,实现人脸验证、追 踪和报警等功能。
行为分析
深度学习技术可以自动分析监控视频中的人体行为,如异常行为、 入侵和破坏等,提高安全监控的准确性和实时性。
场景分类
深度学习算法可以通过分析监控视频中的场景信息,自动分类和标记 场景类型,帮助安全监控系统快速响应不同场景的报警信息。
计算资源需求
总结词
深度学习模型需要强大的计算资源进行训练和推理,对硬件设备的要求较高,限制了其 在一些场景下的应用。
详细描述
深度学习模型的训练和推理需要高性能的GPU、TPU等硬件设备支持,而这些设备的成 本较高,使得一些小型企业和研究机构难以承受。此外,对于一些移动设备和嵌入式系 统等场景,由于计算资源的限制,深度学习模型的部署和应用也面临一定的挑战。因此
研究基于深度学习的图像识别技术,有助于提高图像识别的准确率和效率,推动相关行业的智 能化发展,为人们的生活带来更多便利。
图像识别技术的发展历程
传统图像识别方法
深度学习在图像识别中 的应用
深度学习模型的优化
基于特征提取和分类器的图像识别方 法,如SIFT、SURF等。这种方法需 要人工设计特征提取算法和分类器, 计算量大且效果不稳定。
基于深度学习的图像识别技
04
术应用
医学影像分析
医学影像诊断
深度学习算法能够自动识别和分析医学影像,如X光片、CT和 MRI图像,辅助医生进行疾病诊断。
病理特征提取
深度学习技术可以自动提取病理特征,如肿瘤大小、形态和位置, 为医生提供更准确和客观的病理分析依据。
药物研发
深度学习算法可以通过分析医学影像数据,预测药物对人体的作用 和效果,加速新药研发进程。
基于深度学习算法的图像识别与分类研究

全连接层用于将卷积层和池化层提取的特征进行 整合,输出最终的分类结果。
深度神经网络
多层感知器
多层感知器是一种深度神经网络,通过堆叠多个神经元 层来提取和传递信息。
深度信念网络
深度信念网络是一种无监督学习的深度神经网络,通过 训练生成模型来学习数据的潜在表示。
优化算法
梯度下降法
反向传播算法
结果分析
准确率评估
使用测试集对训练好的模型进行评估,计算分类准确 率、混淆矩阵等指标。
性能对比
将所提模型与经典模型进行对比,分析所提模型的性 能优势和不足。
可视化分析
对模型的特征进行可视化,了解模型对图像特征的提 取和分类决策过程。
06
结论与展望
研究成果总结
深度学习算法在图像识别与分类领域 取得了显著成果,提高了分类准确率
和识别精度。
迁移学习、数据增强和混合模型等方 法进一步提升了图像识别的性能,为
实际应用提供了有力支持。
卷积神经网络(CNN)是处理图像识 别问题的主流深度学习算法,具有强 大的特征提取和分类能力。
深度学习算法在人脸识别、目标检测 、语义分割等领域取得了广泛应用, 为相关行业带来了巨大的商业价值。
未来研究方向
激活函数用于引入非线性特性,使神经网络能够 更好地学习和模拟复杂的数据模式。
03 权重和偏置
权重用于调节输入信号的强度,偏置则用于调整 神经元的激活阈值。
卷积神经网络
01 卷积层
卷积层是卷积神经网络的核心,通过卷积运算对 输入图像进行特征提取。
02 池化层
池化层用于降低数据的维度,减少计算量和过拟 合的风险。
根据研究目的和数据集特点,选择合适的深度学 习模型,如卷积神经网络(CNN)、残差网络 (ResNet)、迁移学习等。
Blob分析与亚像素定位算法在LED检测机的机器视觉系统中的应用_马瑶
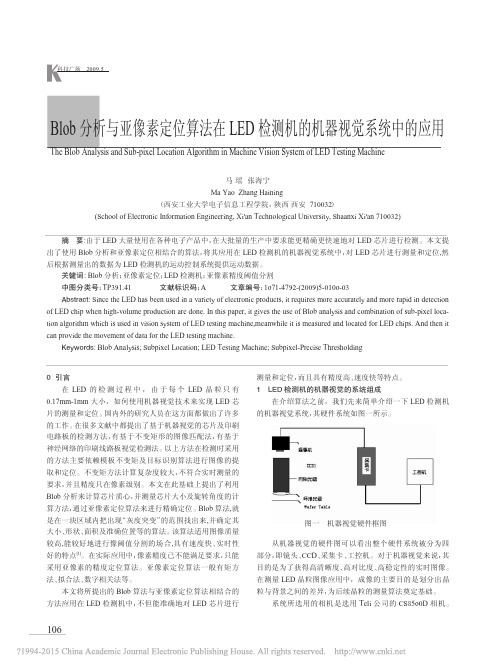
科技广场2009.50引言在LED的检测过程中,由于每个LED晶粒只有0.17mm-1mm大小,如何使用机器视觉技术来实现LED芯片的测量和定位。
国内外的研究人员在这方面都做出了许多的工作。
在很多文献中都提出了基于机器视觉的芯片及印刷电路板的检测方法,有基于不变矩形的图像匹配法,有基于神经网络的印刷线路板视觉检测法。
以上方法在检测时采用的方法主要依赖模板不变矩及目标识别算法进行图像的提取和定位。
不变矩方法计算复杂度较大,不符合实时测量的要求,并且精度只在像素级别。
本文在此基础上提出了利用Blob分析来计算芯片质心,并测量芯片大小及旋转角度的计算方法,通过亚像素定位算法来进行精确定位。
Blob算法,就是在一块区域内把出现“灰度突变”的范围找出来,并确定其大小、形状、面积及准确位置等的算法。
该算法适用图像质量较高,能较好地进行像阈值分割的场合,具有速度快、实时性好的特点[1]。
在实际应用中,像素精度已不能满足要求,只能采用亚像素的精度定位算法。
亚像素定位算法一般有矩方法、拟合法、数字相关法等。
本文将所提出的Blob算法与亚像素定位算法相结合的方法应用在LED检测机中,不但能准确地对LED芯片进行测量和定位,而且具有精度高、速度快等特点。
1LED检测机的机器视觉的系统组成在介绍算法之前,我们先来简单介绍一下LED检测机的机器视觉系统,其硬件系统如图一所示。
从机器视觉的硬件图可以看出整个硬件系统被分为四部分,即镜头、CCD、采集卡、工控机。
对于机器视觉来说,其目的是为了获得高清晰度、高对比度、高稳定性的实时图像。
在测量LED晶粒图像应用中,成像的主要目的是划分出晶粒与背景之间的差异,为后续晶粒的测量算法奠定基础。
系统所选用的相机是选用Teli公司的CS8560D相机。
Blob分析与亚像素定位算法在LED检测机的机器视觉系统中的应用The Blob Analysis and Sub-pixel Location Algorithm in Machine Vision System of LED Testing Machine马瑶张海宁Ma Yao Zhang Haining(西安工业大学电子信息工程学院,陕西西安710032)(School of Electronic Information Engineering,Xi'an Technological University,Shaanxi Xi'an710032)摘要:由于LED大量使用在各种电子产品中,在大批量的生产中要求能更精确更快速地对LED芯片进行检测。
blobs分析
Blobs分析 第四章Blobs分析1、Blob分析由以下步骤组成:获取图像-> 分割图像-> 提取特征。
2、分割图像其实质是选择前景像素,具体操作如下:read_image (Image, 'particle')threshold (Image, BrightPixels, 120, 255)connection (BrightPixels, Particles)area_center (Particles, Area, Row, Column)3、图像或区域对齐问题:(Solution Guide III-C in section 3.4)4、图像预处理A、消除噪声的相关函数:mean_image()gauss_image()相对高斯滤波速度快,效果不完美的函数可选:binomial_filter()对消除斑点和小细线效果好的函数:median_image( )平滑边缘的函数:anisotrope_diff()消除隔行扫描相机所造成的缺陷的函数:fill_interlace()5、图像的详细的处理过程:采集图像-> 提取ROI -> 图像或ROI对齐->修正图像-> 图像预处理-> 提取分割参数->分割图像-> 区域预处理-> 提取特征-> 将结果转为世界坐标-> 可视化显示。
A、获取分割参数相对于固定阈值,我们还可以选择依据每幅图像的动态阈值,方法如下:gray_histo_abs()histo_to_thresh()通过给出背景图,我们可以使用函数:Intensity()依据背景图的像素均值与待处理图的像素均值的区别,动态的改变阈值。
B、分割图像各种函数其中最简单的分割函数是阈值分割:Threshold()另一常用方法,第二幅图像作为参考图像,使用局部阈值代替全局阈值,参考图像可以是空的背景静态图或者是平滑之后的动态图:C、区域预处理通常ROI分割后,要进行修改处理,比如:抑制小区域,区域方向定位,封闭区域等。
机器视觉目标识别方法解析:Blob分析法、模板匹配法、深度学习法
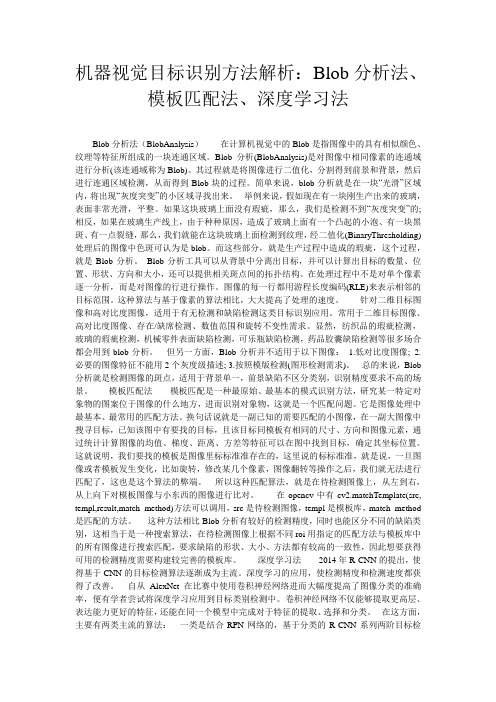
机器视觉目标识别方法解析:Blob分析法、模板匹配法、深度学习法Blob分析法(BlobAnalysis)在计算机视觉中的Blob是指图像中的具有相似颜色、纹理等特征所组成的一块连通区域。
Blob分析(BlobAnalysis)是对图像中相同像素的连通域进行分析(该连通域称为Blob)。
其过程就是将图像进行二值化,分割得到前景和背景,然后进行连通区域检测,从而得到Blob块的过程。
简单来说,blob分析就是在一块“光滑”区域内,将出现“灰度突变”的小区域寻找出来。
举例来说,假如现在有一块刚生产出来的玻璃,表面非常光滑,平整。
如果这块玻璃上面没有瑕疵,那么,我们是检测不到“灰度突变”的;相反,如果在玻璃生产线上,由于种种原因,造成了玻璃上面有一个凸起的小泡、有一块黑斑、有一点裂缝,那么,我们就能在这块玻璃上面检测到纹理,经二值化(BinaryThresholding)处理后的图像中色斑可认为是blob。
而这些部分,就是生产过程中造成的瑕疵,这个过程,就是Blob分析。
Blob分析工具可以从背景中分离出目标,并可以计算出目标的数量、位置、形状、方向和大小,还可以提供相关斑点间的拓扑结构。
在处理过程中不是对单个像素逐一分析,而是对图像的行进行操作。
图像的每一行都用游程长度编码(RLE)来表示相邻的目标范围。
这种算法与基于像素的算法相比,大大提高了处理的速度。
针对二维目标图像和高对比度图像,适用于有无检测和缺陷检测这类目标识别应用。
常用于二维目标图像、高对比度图像、存在/缺席检测、数值范围和旋转不变性需求。
显然,纺织品的瑕疵检测,玻璃的瑕疵检测,机械零件表面缺陷检测,可乐瓶缺陷检测,药品胶囊缺陷检测等很多场合都会用到blob分析。
但另一方面,Blob分析并不适用于以下图像:1.低对比度图像; 2.必要的图像特征不能用2个灰度级描述; 3.按照模版检测(图形检测需求)。
总的来说,Blob 分析就是检测图像的斑点,适用于背景单一,前景缺陷不区分类别,识别精度要求不高的场景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 图像特征提取
图像的几何特征在图像分析中起着十分重要的作用 ,在 许多图像系统应用中 ,经常使用区域的一些几何特征 ,如大 小 、位置和方向等来确定物体的位置并识别它们 [3 ] 。二值图 像能给出物体的轮廓信息 ,因此适合于图像几何特征的提取 。
仪器仪表用户
文章编号 : 1671 - 1041 (2008) 04 - 0001 - 02
□研究报告 □
基于 Blob算法的机器视觉图像识别方法的研究
马永华 1, 2 , 耿瑞芳 2 , 张 罡 2
( 1. 北京工业大学 ,北京 100022; 2. 北京联合大学 生物化学工程学院 ,北京 100023)
关键词 : lwip; W eb Server; DSP;电能计量 ;网络监控 中图分类号 : TP432 2 文献标识码 : A
Research of solar photovolta ic surve illance system ba sed on network
L ID e2Jun, L IU J ie, T IAN Y u2kang
文章编号 : 1671 - 1041 (2008) 04 - 0002 - 03
基于网络技术的太阳能光伏发电系统的研究
李德骏 , 刘 杰 , 田裕康
(武汉科技学院 电子信息工程学院 ,武汉 430073)
摘要 : 网络监控技术随着微电子技术 、现代通信和网络技术发展而不 断改进 ,采用网络技术对光伏设备进行监控有利于设备的操作和管理 。 本系统利用以太网的技术 ,构建一个以 DSP为核心的嵌入式 W eb2Sev2 er,加载了 lwip协议栈的 ,能与 Internet互连 ,实现用户对光伏设备进行 自动化监控和对电能进行计量与控制等功能 。
j
+
1
(7)
由上式可求出一组归一化的中心矩 , 同样将中心归一化
进行组合 ,可获得如下 6个不变的矩组合
φ 1
(8)
φ 2
= (η20
-
η 02
)
2
+ 4η211
(9)
φ 3
= (η30
-
3η12 ) 2
+ ( 3η21
+η03 ) 2
( 10)
φ 4
= (η30
+η12 ) 2
+ (η21
)
[
(η30
+η12 ) 2
-
(η12
+η03 ) 2 ] +
4η11 [η30 +η12 ) + (η21 +η03 ) ]
( 13)
当区域进行平移 、旋转 、尺度变换时 , 这些不变矩是不变
的 。不变矩具备了良好的形状特征 。
4 物体图像的识别
模式识别是指对一系列过程或事件的分类与描述 。对于 从一幅含有多个物体的数字图像中识别某一事物的过程 , 一 般需要 3 个阶段 :第一阶段为图像分割或分离阶段 ; 第二阶段 为特征提取 ;第三阶段为分类或决策 [4 ] 。
摘要 :本文介绍了 Blob算法实现机器视觉图像识别的方法 , 在此基础 上提出识别规则物体的方法 ,利用不变矩 、图形的面积和周长的比值来 识别物体的形状 ,从而识别出规定形状的物体 。
关键词 : 机器视觉 ; Blob算法 ; 不变矩 ; 物体识别 中图分类号 : TP301. 6 文献标识码 : A
单而快速 , 可以检测出目标物的形态参数如区域面积 、质心 、
周长 、尺寸 、方位 、数量等 。
5 图像识别结果
利用 B lob算法对图像中的指定物体进行识别 , 结果如图 1、图 2所示 。
上图中带十字号的图形为要求识别的物体形状 。同时用
该十字号标出了被识别物体的中心坐标 , 以便给机械手的动
图像被采集进来时进行二值化处理 , 再用 B lob算法将目 标和背景进行分离 ,同时进行特征提取 , 特征包括图形的不变 矩 、面积和周长 ,最后进行分类识别 。
本文涉及的物体图像都为规则几何图形 。此图形的边缘 轮廓几乎包含了该物体几何形状的所有信息 。因为这里考虑
欢迎订阅 欢迎撰稿 欢迎发布产品广告信息
xf ( x, y)
(2)
xy
∑∑ M 01 =
yf ( x, y)
(3)
xy
由于用式 ( 1) 描述区域的形状对区域的平移 、旋转 、尺度
变换不具有不变特性 ,因此需要对该矩进行变化处理 。首先将
坐标点移到区域的形心 ,重新计算区域的中心矩 ,即 :
∑∑ μ ij
=
( x - x) i ( y - y) j
以很容易的确定其为哪种形状的图形 。
处理过程中 , B lob并不是分析单个的像素 , 而是对图像的
行进行操作 , 图像的每一行都用游程长度编码 (RLC) 来表示
相邻的目标范围 。所谓游程长度编码 ( RLC) 就是根据黑白像
素的长度进行编码 , 其方法是按不同长度段发生的概率而分
配不同长度的码段 。这种方法与基于像素的算法相比 , 算法简
BLOB算法 ,就是在一块区域内把出现 "灰度突变 "的范围 找出来 ,并确定其大小 、形状 、面积及准确位置等的算法 ;该算 法适用图像质量较高 ,能较好地进行像阈值分割的场合 ,具有 速度快 ,实时性好的特点 [1 ] 。
2 图像处理分析
图像处理指的是把图像变换成其它图像的操作 ,包括图 像的变换 、增强 、复原 、匹配 、滤波等技术 。它们都是对输入图 像的某种有效的改善 ,其输出仍然是一幅完整的图像 [2 ] 。
[ 3 ]刘 禾. 数 字 图 像 处 理 及 应 用 [ M ]. 北 京 : 中 国 电 力 出 版 社. 2006.
[ 4 ]边肇琪. 模式识别 [M ]. 北京 :清华大学出版社. 2000. [ 5 ]陈书海 , 傅录祥. 实 用数字 图像处 理 [ M ]. 北 京 : 科学出 版
社. 2005.
作提供准确位置 。
仪器仪表用户
图
1 从 2个物体中识别出 正六棱柱体
图 2 从 3个物体中识别出 正三棱柱体识别结果图
6 结束语
图像的识别有很多种方法 :如统计模式识别 、结构模式识 别 、模糊模式识别 、神经网络识别 、支撑向量机识别等方法 ,本 文提出的基于 B lob算法的图像识别方法简便 、准确 ,但对于复 杂形状的物体无法识别 。 □
The study of robot2v ision image iden tify m ethod ba sed on Blob ar ithm etic
M A Y ong2hua1, 2 , GENG Ru i2fang2 , ZHANG Gang2
( 1. Be ijing Un iversity of Technology, Be ijing 100022, Ch ina; 2. B iochem ica l Eng ineer ing College of Be ijing Un ion Un iversity, Be ijing 100023, Ch ina )
参考文献
[ 1 ]耿瑞芳 ,曹柳林 ,耿盛 ,林佩瑜. 机械手视觉系统设计与实现 [ J ]. 仪器仪表用户. 2007, (1) : 36 - 38.
[ 2 ]陆地. 基于图像处理的图形轮廓自动识别技术研究 [ J ]. 长安 大学学报 (建筑与环境科学版 ). 2004, (3) : 73 - 78.
在这个定义下面积的计算非常简单 , 求出域边界内像素点的
总和即可 ,计算公式为
NM
∑∑ S =
f ( x, y)
( 14)
x =1 y =1
这里的 f ( x, y) 为二值图像 , 其取值 0时表示物体 , 取值 1
时表示背景 ,其面积就是统计 f ( x, y) = 0的个数 。
在算法中数值化的二值图像用坐标 ( x, y) 表示像素点的
(4)
x∈R y∈R
其中 ( x, y) 为区域 R的形心 ,由下式求得
x = M 10
(5)
M 00
y = M 01
(6)
M 00
中心矩
μ ij
虽然对区域平移
具
有
不变性
,
但对
旋
转和
尺度
变化依然敏感
,
可通过对
μ ij
进行归一化得到尺度的不变
性
。归
一化中心矩定义为
η ij
μ
=
ij
μr
,
r
=
00
i
+ 2
E IC Vo .l 15 2008 No. 4 1
□研究报告 □
的是规则图形的识别 , 在规则图形中其周长与面积有固定的
比例关系 ,采用比例公式 C = P2 /S (其中为 P周长 , S 为图形
面积 ) , 并结合不变矩的图形识别算法 , 可判断出指定物体图
形的形状 。
最简单的面积计算方法是统计边界内部的像素的数目 ,
( College of Electron ics & Informa tion Eng ineer ing, W uhan Un iversity of Sc ience and Eng ineer ing, W uhan, 430073, Ch ina ) Ab s tra c t : W ith the de ve lopm e n t o f m ic ro e le c tro n ica l te chno lo gy、 m o de rn comm un ica tio n、 ne two rk te chno lo gy, ne two rk S u rve illa nce