双起升场桥双吊具位置同步控制方法研究
双起升位置不同步影响双吊具对接的解决思路——随机清零
4.5 H13.03 –副起升清零控制点 副起升清零控制点
4.6 H13.02 –副起升清零设定值 副起升清零设定值
4.7 H13.03 –添加副起升清零控制点的控制程序 添加副起升清零控制点的控制程序
假设利用第三个清零控制点
4.8 H13.02 –修改副起升清零设定值 修改副起升清零设定值
4.1 线路修改 添加“起升同步”开关 线路修改—添加“起升同步” 添加
4.2 H13.02 –主起升高度值 主起Hale Waihona Puke 高度值MW00230 主起升高度值
4.3 H13.11 –主起升高度检测(2M)MB00223B 主起升高度检测( ) 主起升高度检测
4.4 H13.14 –副起升高度检测(2M)MB06223B 副起升高度检测( ) 副起升高度检测
ORGANIZATION OF STUDY & STAFF OF TECHNOLOGY
学习的组织
技术的员工
MANAGEMENT FIRST, MAINTENANCE IMPORTENANCE, REPAIR AUXILIARY
管理为先、保养为重、修理为辅
对应的第三清零设定值由原来 的#W00037改为主起升高度值 MW00230
三、使用方法及要求
1、该开关使用范围一般包括:起升钢丝绳更换后或调整后;作业期间主起 、该开关使用范围一般包括:起升钢丝绳更换后或调整后; 升与副起升吊具高度误差过大,无法通过对吊具的倾转进行调整时等等。 升与副起升吊具高度误差过大,无法通过对吊具的倾转进行调整时等等。 2、使用前必须先确认主起升高度行程在正常范围内,吊具水平状态是否正 、使用前必须先确认主起升高度行程在正常范围内, 常 若以上情况存在不正常,则当次清零操作只能认为是临时处理)。 (若以上情况存在不正常,则当次清零操作只能认为是临时处理)。 3、主、副起升要同时下降到2米以下同一高度(两个吊具上架对准)。 、 米以下同一高度( 副起升要同时下降到 米以下同一高度 两个吊具上架对准)。 4、同时打开大车总旁路开关和“起升同步”开关3秒以上,这时副起升自 、同时打开大车总旁路开关和“起升同步”开关 秒以上 秒以上, 动写入主起升当前高度,达到清零效果。 动写入主起升当前高度,达到清零效果。 5、随机清零完成后所有开关恢复正常状态,试机检查是否已清零好。 、随机清零完成后所有开关恢复正常状态,试机检查是否已清零好。
双起升岸桥吊具锚定及通信方式的改造探析
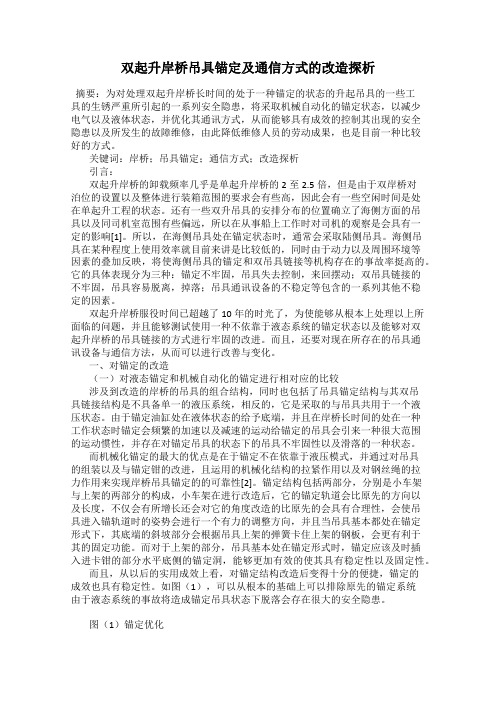
双起升岸桥吊具锚定及通信方式的改造探析摘要:为对处理双起升岸桥长时间的处于一种锚定的状态的升起吊具的一些工具的生锈严重所引起的一系列安全隐患,将采取机械自动化的锚定状态,以减少电气以及液体状态,并优化其通讯方式,从而能够具有成效的控制其出现的安全隐患以及所发生的故障维修,由此降低维修人员的劳动成果,也是目前一种比较好的方式。
关键词:岸桥;吊具锚定;通信方式;改造探析引言:双起升岸桥的卸载频率几乎是单起升岸桥的2至2.5倍,但是由于双岸桥对泊位的设置以及整体进行装箱范围的要求会有些高,因此会有一些空闲时间是处在单起升工程的状态。
还有一些双升吊具的安排分布的位置确立了海侧方面的吊具以及同司机室范围有些偏远,所以在从事船上工作时对司机的观察是会具有一定的影响[1]。
所以,在海侧吊具处在锚定状态时,通常会采取陆侧吊具。
海侧吊具在某种程度上使用效率就目前来讲是比较低的,同时由于动力以及周围环境等因素的叠加反映,将使海侧吊具的锚定和双吊具链接等机构存在的事故率挺高的。
它的具体表现分为三种:锚定不牢固,吊具失去控制,来回摆动;双吊具链接的不牢固,吊具容易脱离,掉落;吊具通讯设备的不稳定等包含的一系列其他不稳定的因素。
双起升岸桥服役时间已超越了10年的时光了,为使能够从根本上处理以上所面临的问题,并且能够测试使用一种不依靠于液态系统的锚定状态以及能够对双起升岸桥的吊具链接的方式进行牢固的改进。
而且,还要对现在所存在的吊具通讯设备与通信方法,从而可以进行改善与变化。
一、对锚定的改造(一)对液态锚定和机械自动化的锚定进行相对应的比较涉及到改造的岸桥的吊具的组合结构,同时也包括了吊具锚定结构与其双吊具链接结构是不具备单一的液压系统,相反的,它是采取的与吊具共用于一个液压状态。
由于锚定油缸处在液体状态的给予底端,并且在岸桥长时间的处在一种工作状态时锚定会频繁的加速以及减速的运动给锚定的吊具会引来一种很大范围的运动惯性,并存在对锚定吊具的状态下的吊具不牢固性以及滑落的一种状态。
基于滑模控制的双起升场桥双吊具同步控制

基于滑模控制的双起升场桥双吊具同步控制
赖锡坤;朱大奇;顾伟
【期刊名称】《控制工程》
【年(卷),期】2007(0)S3
【摘要】针对双起升场桥双吊具协调控制的外界干扰问题,提出了一种自适应滑模跟随控制器。
将变结构滑模控制技术引入双吊具同步控制中,采用主从式跟踪方式,设计跟踪吊具的滑模控制律,给出了系统稳定性条件。
该控制算法较好地实现了双吊具运动的同步控制,提高了双起升场桥双吊具同步控制的抗干扰功能。
仿真结果表明了其有效性。
【总页数】3页(P145-147)
【关键词】电机;双吊具;滑模控制;同步控制
【作者】赖锡坤;朱大奇;顾伟
【作者单位】上海海事大学航运技术与控制工程重点实验室
【正文语种】中文
【中图分类】TH21
【相关文献】
1.双起升场桥双吊具位置同步控制方法研究 [J], 安婷婷
2.基于实时内核的双起升双吊具桥吊实时仿真平台 [J], 马晓飞;徐为民;褚建新;周贤文
3.双起升桥吊双吊具同步协调控制 [J], 徐攀;徐为民;褚建新
4.基于模糊滑模控制的双路阀控液压马达同步控制研究 [J], 杨皓琦;苏东海;胡懿宸;罗擎
5.双起升桥吊双吊具互锁的自适应滑模同步控制 [J], 徐攀;徐为民;谭莹莹;李众峰因版权原因,仅展示原文概要,查看原文内容请购买。
双吊点电气同步控制系统的设计

b t e n te t p i t o l i g t e h a y l a .T e w r q e ce a i h d o ls — o e t r s e d h e ew e h wo o ns i n h e v o d h t o AC fe u n is r n n t e mo e f co e l p v co p e .T y t h o
变流 技 术
Co v rerT c nq e n et e h iu s
— — — — —
《 电气 自动化) 0 2年第 3 21 4卷 第 4期
双 吊点 电气 同步控 制 系统 的设 计
谢 丹 雄 。肖彦 直 ( 汉数字研究所 , 武 湖北 武 汉 摘 4 07 3 04)
要 :在 起 升 机构 2x 0 250双 吊 点 电气 同步 控 制 系 统 中 , 用 矢 量 变频 调 速 和 P C控 制 解 决 了 在无 机 械 轴 联 接 下 同 步驱 动 同一 位 能 利 L
Th sg fDu l o n e tia y c r n u n r I y t m e De i n o a - itElc r l n h o o s Co to s e p c S S
XI n.i n XI E Da xo g. A0 n—h Ya z i
( h nDgtl n i ei ntu , u a ue 4 0 7 ,C ia Wu a ii gn r gIs tt W h nH bi 3 0 4 hn ) aE e n ie
I 引 昌 J
乌江银 盘泄洪坝顶 2X 0/ 0 N( 向) 25 0 50k 双 门式 启 闭机 ( 简 称 门机) 安装在泄洪坝段 2 75 , 2 .0m高程坝顶 上。该 门机 系统包 括 起升 , 小车 , 大车和回转 四个 部分 , 现只分析起升部分 。起 升机
双动力起升驱动系统的控制研究
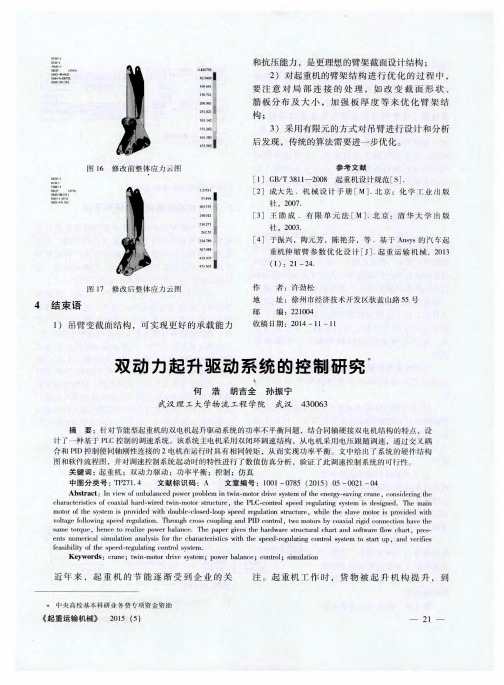
上 升 时 ,由主 电机 与辅 助 电机 共 同拖 动 载 荷 ;载
荷 下 降 时 主 电 机 空 转 ,辅 助 电 机 工 作 于 发 电 状
感器 实 时采 集 双 电机 的转 速 信 号 ,电压 传 感 器 采 集发 电机 的输 出 电压 ( 即 主 电机 的输 入 电 压 )信 号 ,电流传 感器 分别 采 集 2电机 的 电枢 电流 信 号 ,
作 为 主 电机 和辅 助 电机 。发 电 机 组 或 电网 电 源 对 主 电机供 电 ,储 能 机构 对 辅 助 电机 供 电 。 当载 荷
处理 。该模块包括传感器、P L C 、励磁控制器 ,电 压跟 踪控制 器 ,其总 体架构 图如 图 2所 示 。
该平 台 的工 作 原 理 为 :机 构 工 作 时 ,转 速 传
1 )2电机 的 供能 相 对 独 立 ,给 辅 助 电机供 能 的储能 单元 的能 量 会 随 时 间 发 生 变 化 ,再 加 上 制 造上 的差异 ,型 号相 同的 2电 机 具 有 不 完 全 相 同 的 工 作 特 性 ,可 影 响 整 个 电 机 机 构 工 作 的 平
稳性 。
2 双 电机控制系统的软硬件 平台
双 电机 控 制 系 统 平 台 的 主 要 功 能 是 完 成 对 主
电机 、辅 电机 所 产 生 信 号 ( 如 主 电机 转 速 、 电枢
电流 ,电枢 电压 和 辅 电机 的 电 枢 电流 ) 的 采 集 与
性 联接 的直 流 电机 取 代 原 来 大 功 率 直 流 电机 分 别
跟 踪控 制 器 ,它有 2个 作 用 :一 是 及 时 跟 踪 主 电
机 输入 电压 的变 化 ;二 是 将 储 能 机 构 输 出的 电 压 转换 为 与主 电机 的输 人 电压 相 等 的 。在 不
大型双吊点液压启闭机的同步控制
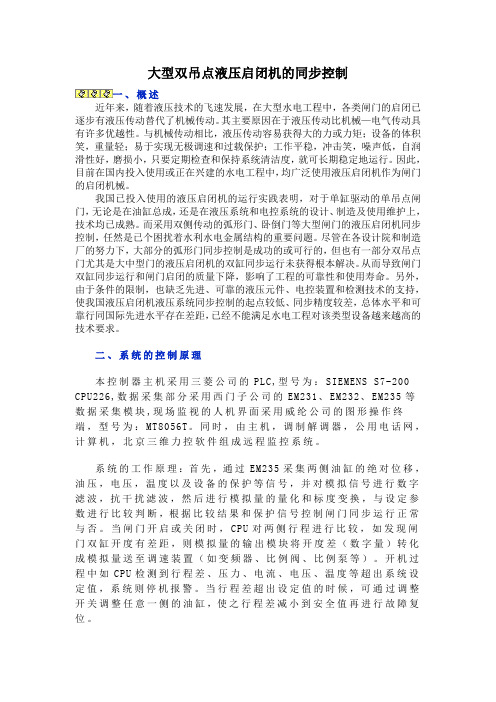
大型双吊点液压启闭机的同步控制一、概述近年来,随着液压技术的飞速发展,在大型水电工程中,各类闸门的启闭已逐步有液压传动替代了机械传动。
其主要原因在于液压传动比机械—电气传动具有许多优越性。
与机械传动相比,液压传动容易获得大的力或力矩;设备的体积笑,重量轻;易于实现无极调速和过载保护;工作平稳,冲击笑,噪声低,自润滑性好,磨损小,只要定期检查和保持系统清洁度,就可长期稳定地运行。
因此,目前在国内投入使用或正在兴建的水电工程中,均广泛使用液压启闭机作为闸门的启闭机械。
我国已投入使用的液压启闭机的运行实践表明,对于单缸驱动的单吊点闸门,无论是在油缸总成,还是在液压系统和电控系统的设计、制造及使用维护上,技术均已成熟。
而采用双侧传动的弧形门、卧倒门等大型闸门的液压启闭机同步控制,任然是已个困扰着水利水电金属结构的重要问题。
尽管在各设计院和制造厂的努力下,大部分的弧形门同步控制是成功的或可行的,但也有一部分双吊点门尤其是大中型门的液压启闭机的双缸同步运行未获得根本解决。
从而导致闸门双缸同步运行和闸门启闭的质量下降,影响了工程的可靠性和使用寿命。
另外,由于条件的限制,也缺乏先进、可靠的液压元件、电控装置和检测技术的支持,使我国液压启闭机液压系统同步控制的起点较低、同步精度较差,总体水平和可靠行同国际先进水平存在差距,已经不能满足水电工程对该类型设备越来越高的技术要求。
二、系统的控制原理本控制器主机采用三菱公司的PLC,型号为:SIEMENS S7-200 CPU226,数据采集部分采用西门子公司的EM231、EM232、EM235等数据采集模块,现场监视的人机界面采用威纶公司的图形操作终端,型号为:MT8056T。
同时,由主机,调制解调器,公用电话网,计算机,北京三维力控软件组成远程监控系统。
系统的工作原理:首先,通过EM235采集两侧油缸的绝对位移,油压,电压,温度以及设备的保护等信号,并对模拟信号进行数字滤波,抗干扰滤波,然后进行模拟量的量化和标度变换,与设定参数进行比较判断,根据比较结果和保护信号控制闸门同步运行正常与否。
一种双吊机的同步吊装方法、机构及系统[发明专利]
专利名称:一种双吊机的同步吊装方法、机构及系统
专利类型:发明专利
发明人:黄厚军,曾少锋,汤序霖,雷雄武,李泽,莫莉,李城,冯少鹏,周杰英,叶成波,吕媛娜
申请号:CN201910887325.9
申请日:20190919
公开号:CN110775824A
公开日:
20200211
专利内容由知识产权出版社提供
摘要:本发明公开了一种双吊机的同步吊装方法、机构和系统,其中方法包括:S1:控制双吊机同步起吊移动的同时启动装设在双吊机上的检测组件;S2:实时接收所述检测组件传送的检测数据,根据检测数据计算升降过程中双吊机的两定位点的实时高程值,并计算两定位点之间存在的高程差;S3:判断高程差是否大于或等于预设值,若是,则执行步骤S4;若否,则执行步骤S5;S4:分别调整双吊机的移动状态,并在双吊机移动过程中循环步骤S2和步骤S3,直至双吊机之间的高程差小于预设值;S5:控制双吊机继续同步起吊移动,循环步骤S2和S3直至双吊机移动到设定高度。
本发明对双吊机的起吊高度进行监控,及时调整双吊机的升降情况,从而实现双吊机升降的同步性。
申请人:广州机施建设集团有限公司
地址:510700 广东省广州市黄埔区黄埔东路1080号(自编1栋)26楼
国籍:CN
代理机构:广州市越秀区哲力专利商标事务所(普通合伙)
代理人:贺红星
更多信息请下载全文后查看。
双起升岸桥吊具锚定及通信方式的改造
双起 升 岸桥 的装 卸 效 率平 均 是单 起 升 岸 桥 的 1 . 5 ~ 2 倍, 但 由于双 起 升 岸 桥对 泊 位 设 置 和 集装 箱 位置 的要 求 较 高 ,因此有 相 当一 部 分 的时 间 处 于 单起 升作 业状 态 。另外 , 由于双起 升 吊具 的排 布位
具通信系统不稳定 ; 等等。 公 司码头 部分 双起 升岸 桥 服役 时间 已超 过 1 0 年, 为从根本上解决上述问题 , 尝试使用一种不依 赖 于液压 系统 的锚 定形 式 和更加 牢 固 的双 吊具 连
Do u b l e S p r e a d e r Qu a y s i d e C o n t a i n e r C r a n e
S U Qi a n g , P AN Gu a n g , S UN C h e n g s h a n , M AO We i d o n g
的安 全 隐患 , 采 用机械 式 锚 定形 式 , 减 少 电气及 液 压元 件 , 并优 化 通 信模 式 , 有 效 控 制 故障率, 降低 维修 人 员劳动 强度 。
关键 词 :港 I : 7 ; 岸桥 ; 锚定 ; 通信 ; 双 吊具
I m pr o v e me nt o n Anc ho r a nd Co m m uni c at i o n Sy s t e m o f
p r o b l e m, t h e me c ha ni c a l a n c h o r f or m i s a p pl i e d ,t he o ig r i na l e l e c t ic r a n d h y d r a ul i c c o mp on e n t s a r e r e d u c e d a nd t he mo d e o f c o mm u n i c a t i o n i s o p t i mi z e d . Th e f a i l u r e r a t e c a n b e c o n t r o l l e d e ic f i e n t l y a n d he t ma i n t e n a n c e s t a f f l a b o r i nt e ns i t y c a n b e r e d u c e d e xt r e me l y . Key wor ds :p o r t ;q ua ys i de c r a n e ;a n c h o r ;c o mmun i c a t i o n;d o ub l e s p r e a d e r
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双起升场桥双吊具位置同步控制方法研究
作者:安婷婷
来源:《硅谷》2014年第10期
摘要目前,集装箱港口作业多采用单箱操作,大大影响了港口的作业效率。
文章根据双吊具的操作原理,在双电机传动试验平台的基础上,建立了异步电机矢量控制的Simulink仿真模型,在Simulink仿真的基础上,提出了半闭环位置跟踪控制系统方法,实验结果表明,无论是正常状况还是干扰作用下,电机2均能可靠跟踪电机1的运动,两者同步误差较小,达到了较好的同步效果。
关键词双吊具,双电机,Simulink,位置跟踪
中图分类号:TH21 文献标识码:A 文章编号:1671-7597(2014)10-0032-02
双起升场桥双吊具的同步运动是双起升场桥双吊具关键技术,而吊具的运动是通过电机驱动的,所以,要控制双吊具的运动同步,关键是控制两台电动机的转速与位置。
基于这些问题,本文着重从控制双场桥双电机的协调性出发,研究在没有机械控制和人为设定的情况下,双电机对实时情况作出自动调整。
1 异步电机速度控制与双电机位置同步控制
由于将直流标量作为电机外部的控制量,然后又将其变换成交流量去控制交流电机的运行,均是通过矢量坐标变换来实现的。
将三相静止坐标系变换至两相同步旋转坐标系。
则在两相同步旋转坐标系(d-q坐标系)上的数学模型如下。
1.1 磁链方程
(1)
式中Lm为d-q坐标系定子与转子同轴等效绕组间的互感(Lm=3/2Lms),L为d-q坐标系下等效两相绕组的自感(L=Lm+Ll),下标s,r分别表示定子与转子。
1.2 转矩和运动方程
(2)
其中,为电机转子角速度。
构建异步电动机在两相同步旋转的d-q坐标系上的数学模型。
在此坐标下的w-wr-is状态方程为
(3)
可得
(4)
(5)
式(3)、(4)、和式(5)构成了矢量控制基本方程。
2 双电机位置跟踪控制方法、系统软件研发
本实验平台的驱动电机和负载电机均采用Y2VP系列变频调速电动机,均是带有速度传感器的三相交流异步电机,均采用矢量控制策略进行转速调节,并且带有Mp60终端显示编码器,可以直接读得转矩和电动机实时转速,驱动电机和实物电机同轴相连,这就方便了后面驱动电机转速的读取和界面的控制。
实验平台所使用的负载电机和驱动电机相关参数如表1所示。
表1 驱动电机和负载电机各参数
额定
电压(V)额定电流(A)额定功率(kW)额定
转速
(r/min)额定转矩(N·M)功率因素(cos)频率(Hz)
负载电机 400 54.7 30 1475 194 0.86 50
驱动电机 400 66.7 37 1475 240 0.87 50
根据实验平台实物电机的相关参数和电机控制算法建立Smulink模型。
所搭建的带速度传感器的矢量控制系统的电气原理图如图1所示。
在图中,主电路采用了电流滞环控制逆变器。
在控制电路中,转速环后增加了转矩控制环。
转速调节器ASR的输出T*e,是转矩调节器ATR的输入,而转矩的反馈信号则是通过矢量控制方程计算得到的Te。
电路中的磁链调节器ApsiR设置了电流变换和磁链观测环节,用于对电动机定子磁链的控制。
定子电流的转矩分量i*st和励磁分量i*sm分别是ATR和ApsiR的输出。
由图1可以看出i*st和i*sm经过2r/3r变换后得到i*sA、i*sB、i*sC,并通过电流滞后环控制PWM逆变器控制电动机定子的三相电流。
给定转速为1400 r/min,空载起动,在6 s时加载60 N·M,系统的Simulink仿真结果如图2所示。
其中图2(a)为电动机的转速曲线,图2(b)为转矩调节器输出波形。
在下图波形中可以看到,在矢量控制下,0-3.5 s时间内转速平稳上升,加载后上升略有下降但很快恢复,
在3.5 s时达到给定转速,在第6 s对系统加载,这两个时刻系统调节器和电流、转矩都有相应的响应。
由图1可知由ATR和ApsiR都是带限幅的PI调节器,因此可以保证定子电流的给定值i*sA、i*sB、i*sC保持不变,实现恒电流起动。
根据仿真波形可以看出,此仿真模型很好的模拟了三相异步交流电机在矢量控制方法下的电机特性,并且稳定性良好。
(a)电动机的转速曲线
(b)转矩调节器输出波形
图2 带速度传感器的矢量控制系统的电机仿真
在Matlab/Simulink环境下,通过对异步电机数学模型的分析推导,建立异步电机半闭环位置跟踪控制系统的模型,整体的结构框图如图3所示。
系统包括PID整定控制器模块、电机推进系统模块、电机新的位置模块、位置反馈模块。
图3 三相异步电机位置跟踪控制系统原理框图
在Matlab/Simulink环境下,通过对异步电机数学模型的分析推导,建立异步电机三闭环位置跟踪控制系统的模型。
电机位置跟踪系统采用具有位置、速度、电流反馈的三闭环结构,其中电流环、速度环为内环,位置环位外环,这样的三环结构使系统具有较好的静态和动态性能。
电流环采用PI控制算法,在设置时须考虑电流的快速跟随性能;速度环同样采用PI调节,在控制系统中起着承上启下的作用;位置环的作用是保证整个伺服系统能够稳定、高效的运行。
位置跟踪仿真结果如图4所示。
由图可以看出,仿真模型具有很好的位置跟踪性能。
图4 双电机位置跟踪控制仿真图
3 总结与展望
本文在实物电机的特性基础上,建立带有速度传感器的三相异步交流电机Simulink仿真模型,在此模型的基础上仿真了三相电机的起动特性,其转速和转矩特性和实物电机的特性基本类似,启动加速特性稳定,仿真一段时间后电机达到最高转速状态运行,转矩特性良好,很好的验证了仿真模型的稳定性和可靠性。
参考文献
[1]秦忆.现代交流伺服系统[M].武汉:华中理工大学出版社,1995:2-4.
[2]W Bolton.Control Engineering[M].New York:Addison Wesley Longman Limited,1998.89-90
[3]项云韦.多台电机周步协调运转的变结构控制[J].电气传动自动化,1999,21(3):33-34.
[4]Zhang W.Design PID controllers for desired time-domain or frequency-domain
response[J].ISA Transactions,2002,4l(4):511-520.
作者简介
安婷婷(1986-),女,2011年毕业于上海海事大学检测技术与自动化装置技术专业,获硕士研究生学位,研究方向:港口设备检验检测研究。