基于单片机的拾物小车自动控制装置设计
基于单片机的智能玩具小车的设计

基于单片机的智能玩具小车的设计随着科技的不断发展,单片机作为一种集成了CPU、存储器、定时器/计数器、多种输入输出口等硬件组件的集成电路芯片,被广泛应用于现代智能玩具设计中,尤其是智能玩具小车的设计。
本文将详细介绍如何基于单片机设计一款智能玩具小车。
单片机,又称微控制器,是一种将计算机的主要功能集成到一个芯片上的微型计算机。
它具有体积小、功耗低、价格便宜等特点,因此特别适合应用于智能玩具、家电、工业控制等领域。
单片机的编程语言包括C语言、汇编语言等,其开发环境也十分成熟,如Keil、IAR等。
基于单片机的智能玩具小车通常采用控制器+传感器+执行器的结构。
控制器负责处理传感器采集的数据并发出控制指令,控制驱动器驱动小车运动。
传感器则负责监测小车的速度、位置、障碍物等信息,为控制器提供决策依据。
执行器由电机、舵机等组成,负责执行控制器的指令。
在智能玩具小车的具体设计中,需要考虑以下几个方面:(1)电路设计:包括电源电路、电机驱动电路、传感器接口电路等。
(2)程序设计:采用C语言或汇编语言编写程序,实现小车的自动控制、传感器数据采集、障碍物识别等功能。
(3)模块化设计:将小车的各个部分进行模块化设计,方便维修和扩展。
(1)确定硬件方案:根据需求选择合适的单片机、电机、传感器等元器件,并设计相应的电路。
(2)编写程序:采用C语言或汇编语言编写程序,实现小车的自动控制、传感器数据采集、障碍物识别等功能。
(3)调试与优化:通过实验调试,优化程序和硬件电路,提高小车的性能和稳定性。
在智能玩具小车的设计中,单片机作为核心控制器,发挥着至关重要的作用。
它通过接收传感器采集的数据,根据预设的算法处理后,向执行器发出控制指令,从而实现小车的自动控制、避障等功能。
单片机还负责整个系统的协调与控制,确保各个模块之间的数据传输和处理高速而稳定。
通过基于单片机的智能玩具小车设计,我们可以充分利用单片机的集成度高、体积小、功耗低等特点,将其应用于各种玩具和智能设备中,从而实现智能化控制和远程操作。
基于51单片机的自动寻迹小车控制设计
STC89C52单片机为智能小车的控制

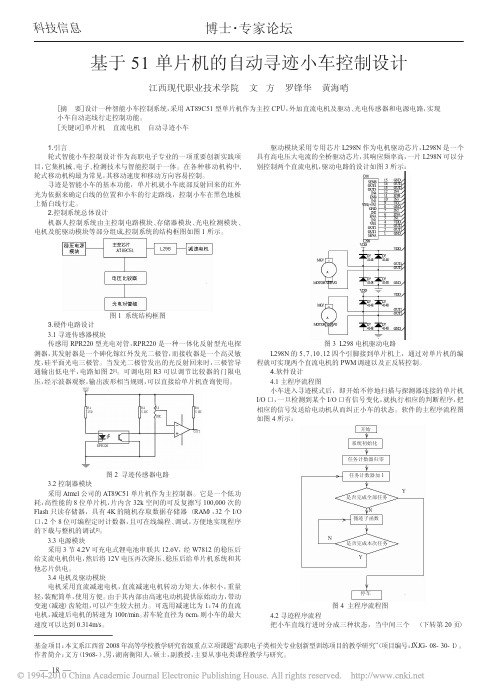
摘要本设计是以STC89C52单片机为智能小车的控制核心,采用直流电机驱动小车前进及转向,电机驱动采用电磁继电器和L298芯片,电源主要是由以充电电池为动力。
系统由单片机通过IO口控制小车的前进避线及转向,通过硬件和软件的调试,最终在预设黑线的白色区域内完成循环超车任务。
目录1系统方案 (2)1.1 主控制器的论证与选择 (2)1.2 电机与驱动的论证与选择 (2)1.3 检测系统的论证与选择 (2)1.4 无线通信系统的论证与选择 (2)2系统理论分析与计算 (2)2.1 小车模型的分析 (2)2.1.1 智能小车控制系统 (2)2.1.2 智能小车转向和速度的控制 (2)2.2 赛道记忆的计算 (2)2.2.1判断黑线记忆 (2)3电路与程序设计 (4)3.1电路的设计 (4)3.1.1系统总体框图 (3)3.1.2 电机子系统框图 (3)3.1.3 红外检测子系统框图 (4)3.1.4电源 (4)3.2程序的设计 (4)3.2.1程序功能描述与设计思路 (4)3.2.2程序流程图 (4)4测试方案与测试结果 (6)4.1测试方案 (6)4.2 测试条件与仪器 (6)4.3 测试结果及分析 (7)4.3.1测试结果(数据) (7)4.3.2测试分析与结论 (7)附录1:电路原理图 (8)附录2:源程序 (9)智能小车(C题)【本科组】1系统方案本系统主要由单片机最小系统模块、直流电机驱动模块、红外光检测模块、锂电池模块组成,下面分别论证这几个模块的选择。
1.1 主控制器的论证与选择方案一:采用FPGA(Field Programmable Gate Array)控制方案。
FPGA内部具有独立的I/O接口和逻辑单元,使用灵活、适用性强,且相对单片机来说,还具有速度快、外围电路较少和集成度高的特点,因此特别适用于复杂逻辑电路设计。
但是FPGA的成本高,而且由于本设计对输出的数独要求不高,所以FPGA高速处理的优势得不到充分体现。
基于单片机的自动寻迹避障小车设计

三、软件设计
电机控制函数根据预设算法输出控制信号,控制电机的动作。最后,我们在 主程序中调用这些函数,实现小车的自动循迹避障寻光功能。
四、测试与结论
四、测试与结论
为了验证系统的可行性和稳定性,我们对智能小车进行了多次测试。测试结 果显示,该系统能够准确地检测黑色引导线、前方障碍物和光源,并能够根据预 设算法自动调整小车的行驶方向和速度,实现了自动循迹避障寻光功能。因此, 基于单片机技术的自动循迹避障寻光智能小车系统具有广泛的应用前景和市场潜 力。
三、实验与测试
三、实验与测试
1、实验环境:在实验室内模拟实际环境进行测试,包括各种路面情况(如平 滑路面、颠簸路面)、各种障碍物类型等。
三、实验与测试
2、测试指标:测试指标包括小车的平均速度、稳定性、准确性等。通过这些 指标可以评估小车的性能并对其进行优化。
三、实验与测试
3、实验结果分析:根据实验结果分析小车的性能表现,针对不足之处进行改 进和优化。
5、执行器
5、执行器
执行器包括舵机和摄像头。舵机用于调节小车的行驶方向,摄像头用于拍摄 和传输图像数据。
三、软件设计
三、软件设计
软件设计是实现小车自动循迹避障寻光功能的关键。我们使用C语言编写程序, 通过调用单片机的外设接口接收传感器数据,根据预设算法处理数据并输出控制 信号,控制电机驱动模块和执行器的动作。
3、传感器:传感器部分包括寻迹传感器和避障传感器。寻迹传感器用于检测 小车行驶路径,避障传感器则用于检测前方障碍物。常见的传感器类型有红外线 传感器和超声波传感器。
一、硬件设计
4、电机:电机部分包括两个电机和相应的驱动器。电机驱动器用于接收控制 器的指令,控制电机的转动方向和速度。
基于单片机控制的简易自动寻迹小车设计

基于单片机控制的简易自动寻迹小车设计宁慧慧,余红英(中北大学信息与通信工程学院 山西省太原市 030051)摘 要:本文介绍了一种基于单片机控制的简易自动寻迹小车设计,包括小车系统构成软硬件设计方法。
该小车以A T89C51为控制核心,利用红外光电传感器对前方障碍物信息及路面信息进行采集,并将障碍物检测信号和路面检测信号反馈给单片机。
单片机对采集到的信号予以分析判断,及时控制驱动电机以调整小车转向,从而使小车能够沿着黑色导引带自动行驶,实现小车自动寻迹的目的。
该技术可以应用于无人驾驶机动车,无人工厂、仓库、服务机器人等领域。
关键词:红外光电传感器;单片机;自动寻迹中图分类号:TP2 文献标识码:ASimple design of a smart auto 2t racking vehicle based on MSC cont rolNing Huihui ,Yu Hongying(Information and Communication Engineering College North University of China Shanxi 030051,China )Abstract :A Simple Design of a smart auto 2t racking vehicle based on MSC cont rol is int roduced in t his paper.The const ruction of t he car ,and met hods of hardware and software design are in 2cluded.The car use A T89C51as t he heart of cent rol in t his system.By using infrared sensors to detect t he information of obstacles in front and t he t race ,t he smart vehicle acquires t he informa 2tion and sends t hem to t he MSC.Then t he MSC analyzes t he signals and cont rols t he move 2ment s of t he motors.Which make t he smart vehicle move along t he given black line antomatic 2ly.The technology can be applied to unmanned aerial vehicles ,unmanned factories ,warehou 2ses ,service robot s and ot her fields.K eyw ords :inf rared sensor ;MSC ;auto 2t racking0 引 言单片机技术作为自动控制技术的核心之一,被广泛应用于工业控制、智能仪器、机电产品、家用电器等领域。
基于单片机的智能跟随小车的设计与实现
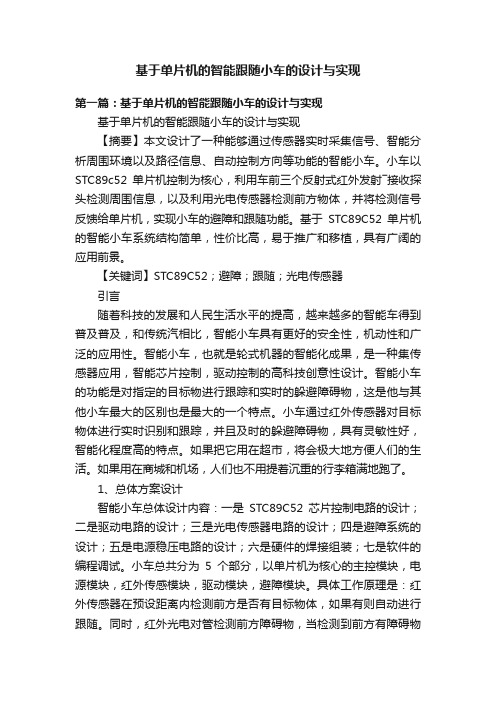
基于单片机的智能跟随小车的设计与实现第一篇:基于单片机的智能跟随小车的设计与实现基于单片机的智能跟随小车的设计与实现【摘要】本文设计了一种能够通过传感器实时采集信号、智能分析周围环境以及路径信息、自动控制方向等功能的智能小车。
小车以STC89c52单片机控制为核心,利用车前三个反射式红外发射―接收探头检测周围信息,以及利用光电传感器检测前方物体,并将检测信号反馈给单片机,实现小车的避障和跟随功能。
基于STC89C52单片机的智能小车系统结构简单,性价比高,易于推广和移植,具有广阔的应用前景。
【关键词】STC89C52;避障;跟随;光电传感器引言随着科技的发展和人民生活水平的提高,越来越多的智能车得到普及普及,和传统汽相比,智能小车具有更好的安全性,机动性和广泛的应用性。
智能小车,也就是轮式机器的智能化成果,是一种集传感器应用,智能芯片控制,驱动控制的高科技创意性设计。
智能小车的功能是对指定的目标物进行跟踪和实时的躲避障碍物,这是他与其他小车最大的区别也是最大的一个特点。
小车通过红外传感器对目标物体进行实时识别和跟踪,并且及时的躲避障碍物,具有灵敏性好,智能化程度高的特点。
如果把它用在超市,将会极大地方便人们的生活。
如果用在商城和机场,人们也不用提着沉重的行李箱满地跑了。
1、总体方案设计智能小车总体设计内容:一是STC89C52芯片控制电路的设计;二是驱动电路的设计;三是光电传感器电路的设计;四是避障系统的设计;五是电源稳压电路的设计;六是硬件的焊接组装;七是软件的编程调试。
小车总共分为5个部分,以单片机为核心的主控模块,电源模块,红外传感模块,驱动模块,避障模块。
具体工作原理是:红外传感器在预设距离内检测前方是否有目标物体,如果有则自动进行跟随。
同时,红外光电对管检测前方障碍物,当检测到前方有障碍物并且小于预设值时将把信息发回给单片机,控制驱动电路让车轮停止转动并后退绕过障碍物继续跟随。
2、系统的硬件设计2.1主控模块主控模块通过单片机利用程序来精确控制小车的运动,从而实现对小车的自动控制。
基于单片机的玩具小车智能控制系统的设计
基于单片机的玩具小车智能控制系统的设计摘要: 在这个电子信息化的时代,随着经济的发展,科技的进步,电子玩具已成为玩具市场上的主流。
为了适应电子玩具市场的需要,我设计了一款新型的智能玩具小车,即本论文研究的基于单片机的玩具小车智能控制的设计。
该小车是以普通的四驱遥控小车为原型,MSP430F247单片机为控制系统,由芯片L298构成的直流电机来驱动电路,而且该小车是利用红外传感器进行障碍物的信息采集,同时也利用PWM技术进行电机调速控制,并辅以相应的语音播报功能。
关键词:MSP430F247单片机;玩具小车;智能控制The intelligent control design of the toy car based on microcontrollerAbstract:In the electronic information era, with the development of economy, the progress of science and technology, electronic toys on the toy market has become a mainstream. In order to meet the needs of the electronic toy market, I designed a new type of intelligent toy car, namely in the research of this paper the design of the toy car based on single chip microcomputer intelligent control. The car is a common all-wheel-drive remote control car as the prototype,MSP430F247 single-chip microcomputer to control system, composed of chip L298 dc motor drive circuit, and the car is an obstacle to using infrared sensor information acquisition, as well as using PWM technology to control motor speed, supplemented by the corresponding speech function.Keywords:MSP430F247 microcontroller ; toy car ; intelligent control目录第一章绪论 (1)第二章小车的系统模块设计 (2)2.1 小车的总体构思 (2)2.2 各个模块的器件介绍 (3)2.2.1 MSP430F247单片机的最小芯片介绍 (3)2.2.2 传感器介绍 (3)2.2.3 语音播报芯片介绍 (4)2.3 各个模块的电路设计 (5)2.3.1 电源模块的设计 (5)2.3.2 电机驱动电路的设计 (6)2.3.3 语音控制模块的设计 (7)第三章小车的系统软件设计 (8)3.1 系统软件设计总体说明 (8)3.2 系统模块软件设计 (8)3.2.1 自动避障设计 (8)3.2.2 智能小车方向与速度控制 (8)3.2.3 语音模块软件设计 (9)3.3 部分系统软件设计难点 (11)第四章小车的各硬件模块的安装调试 (13)4.1 硬件模块安装 (13)4.1.1 车内模块的安装 (13)4.1.2 发光二极管的安装 (14)4.2 系统调试 (15)4.2.1 开发调试工具 (15)4.2.2 软件自身调试 (15)4.2.3 测试仿真结果和分析 (15)第五章总结与展望 (17)5.1 总结 (17)5.2 展望与改进 (17)参考文献 (19)附录 (20)第一章绪论随着我国经济的发展,社会的进步,人们消费水平的提高,电子产品已成为社会市场上的主流产品,人们对电子产品的需求量也在不断增加,电子玩具就是其中之一。
基于51单片机的智能小车控制系统
湖南工业职业技术学院学生毕业设计湖南工业职业技术学院毕业设计课题名称基于51与单片机的智能小车控制系统系(院)名称电气工程系专业及班级学生姓名学号指导教师完成日期年 11 月 19 日摘要随着我国科学技术的进步,智能化作为现代社会的新产物开始越来越普及,各种高科技也广泛应用于智能小车和机器人玩具制造领域,使智能机器人越来越多样化。
智能小车是一个多种高薪技术的集成体,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,可以涉及到当今许多前沿领域的技术。
整个小车平台主要以51单片机为控制核心,通过无线遥控实现前进后退和转向行驶,通过红外线传感器,实现小车的自适应巡航、避障等功能。
设计采用对比选择,模块独立,综合处理的研究方法。
通过翻阅大量的相关文献资料,分析整理出有关信息,在此基础上列出不同的解决方案,结合实际情况对比方案优劣选出最优方案进行设计。
从电机车体,最小系统到无线遥控,红外线对管的自动寻迹再到红外线自动避障和语音控制,完成各模块设计。
通过调试检测各模块,得到正确的信号输出,实现其应有的功能。
最后将各个调试成功的模块结合到小车的车体上,结合程序,通过单片机的控制,将各模块有效整合在一起,达到所预期的目标,完成最终设计与制作,能使小车在一定的环境中智能化运转。
关键字:智能小车,单片机,红外传感器。
目录第一章绪论......................................................................................................................... - 1 -1.1.1智能循迹小车概述.................................................................................................... - 1 -1.1.2课题研究的目的和意义............................................................................................ - 2 -1.1.3智能循迹小车智能循迹分类.................................................................................... - 2 -1.1.4智能循迹小车的应用................................................................................................ - 3 - 第二章方案设计............................................................................................ 错误!未定义书签。
基于单片机的一种多功能玩具小车的设计与实现
随着科技的发展,单片机作为一种常用的微控制器,已经在各个领域得到了广泛应用。
在玩具领域,特别是玩具小车的设计中,单片机的运用也越来越普遍,可以实现各种有趣的功能。
本文将介绍一种基于单片机的多功能玩具小车的设计与实现。
二、设计目标1. 实现无线遥控功能,通过遥控器实现对小车的控制。
2. 设置超声波避障模块,让小车能够自动避开障碍物。
3. 小车可通过蓝牙模块与手机进行连接,实现手机APP控制。
4. 为小车设计多种灯光效果,增添趣味性。
5. 使用音乐模块,使小车产生丰富的声音效果。
三、硬件设计1. 主控芯片选择了常用的Arduino单片机。
2. 驱动模块选用了直流电机驱动模块,实现小车的前进、后退和转向。
3. 采用了超声波传感器模块,用于检测障碍物并实现避障功能。
4. 蓝牙模块选用了蓝牙串口模块,实现与手机的数据传输和控制。
5. 设计了多种灯光效果,包括LED灯和彩色灯带。
6. 音乐模块选用了声音传感器模块,可以发出不同的声音效果。
四、软件设计1. 编写了小车的控制程序,包括前进、后退、左转、右转等基本控制2. 通过编写遥控器程序,实现了对小车的无线遥控功能。
3. 编写了避障算法,使小车能够自动避开障碍物。
4. 开发了手机APP,通过蓝牙模块与小车进行连接和控制。
5. 设计了多种灯光效果的控制程序,可以实现闪烁、变色等效果。
6. 编写了音乐模块的程序,可以根据指令发出不同的声音效果。
五、实现效果1. 小车可以通过遥控器实现前进、后退、左转、右转的基本功能。
2. 超声波传感器可以准确检测到障碍物,并成功避开。
3. 通过手机APP可以实现对小车的遥控和控制各种功能。
4. 多种灯光效果可以有效增加小车的趣味性。
5. 音乐模块发出的声音效果丰富多彩,增加了小车的趣味性。
六、总结与展望本文介绍了一种基于单片机的多功能玩具小车的设计与实现,通过结合硬件设计和软件设计,实现了多种有趣的功能。
未来,可以进一步优化设计,增加更多的传感器模块和功能模块,使小车的功能更加丰富多样。
基于单片机的智能小车控制
信息工程专业课程设计(二)题目基于《STC89C52》单片机的智能小车姓名学号所在院系所在班级完成时间基于单片机的智能小车摘要:智能化作为现代电子产品的新趋势,是今后的电子产业的发展方向。
智能化设计的电子产品可以按照预先设定的模式在一个环境里自动运作,不需要人为的管理,可应用于科学勘探、环境监测、智能家居等方面。
基于单片机的智能小车控制就是其中的一个体现。
本设计实现了一种基于51单片机的按键操作控制和温度检测显示系统,通过温度传感器采集温度数据并且通过显示模块显示出来,通过对按键的操作,自动控制转向电机转向,改变行驶方向。
本课题设计的智能小车,具有按键控制前后左右的功能,温度采集功能,液晶显示功能。
序言 (1)第1章总体设计方案 (2)1.1课题任务分析 (2)1.2 方案论证 (3)1.2.1小车驱动部分 (3)1.2.2 温度显示部分 (3)第2章系统硬件构成 (4)2.1系统设计原理 (4)2.2主要元器件简介 (4)2.2.1 STC89C52RC简介 (4)2.2.2 液晶显示电路 (5)2.2.3 L298N芯片直流电机驱动模块 (6)2.2.4遥控部分独立按键电路 (7)第3章软件的设计与说明 (8)3.1软件设计 (8)3.2软件的说明 (9)3.2.1 控制部分主程序流程 (9)3.2.2 温度检测显示部分主程序流程图 (10)第4章调试与总结 (12)4.1 调试的总结 (12)参考文献 (13)致谢 (14)附录 (15)附件1 L298N电机驱动模块 (15)附件2 小车侧视图 (16)附件3 小车俯视图 (16)附件4 小车最终硬件图 (17)附件5 程序清单 (18)序言随着我国科学技术的进步,智能化和自动化技术越来越普及,各种高科技也广泛应用于智能小车和机器人玩具制造领域,使智能机器人越来越多样化。
智能小车是一个多种高新技术的集成体,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,涉及到当今许多前沿领域的技术[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CNY70 光电传感器
传感Байду номын сангаас分布图
小车驱动模块
小车用三轮车方案,即两电机做驱动分别控制两前轮,后 面安装一个球形万向轮,这样小车的方向容易控制。
小车底盘
小车遥控模块
小车选用4键红外无线收发器来对小车的系统进行总体 控制,这种四键遥控模块应用最广泛,常用于报警器的 设防与解防、车库门遥控、摩托车或汽车防盗报警等领 域,这类用途要求遥控器的遥控距离并不远,一般50米 足够了,但要求:遥控模块价格低廉,发射机手柄体积 小巧、外观精致,耗电尽可能省,工作稳定可靠。
小车实物图
功能演示
循迹功能
遥控控制
避障功能
演示结束
谢谢
基于单片机的拾物小车自动控制装 置设计
小车主要功能
(1)电动小车寻黑色跑道前进; (2)电动小车行进中遇到障碍物报警并停 止前进; (3)红外遥控器控制整个电动小车系统进 行功能切换; (4)LED数码显示和蜂鸣器反馈信息;
主要功能模块设计
循迹避障模块
循迹模块:为了让小车在规定的跑道上前进,我们添上一 黑胶带,通过读取反射式光电传感器的状态来控制小车的 左右转动,从而防止小车乱跑 。这里选取三个光电传感器 CNY70一字横向排列,安装在小车前面,传感器之间的距 离根据跑道的宽度来调整,一只置于轨道中间,两只置于 轨道外侧 。 避障模块:
避障模块:智能小车既然智能,至少要求其在行走的
过程中不,能碰到障碍物,所以其必须具有避障的功能。 避障的基本原理为小车不断发射某种东西(比如光或波), 并不断检测这种东西的反射情况来判断前面有无障碍,小 车应在距障碍物20CM 的范围内做出反应,这样在检测障 碍物的同时发出信号报警。避障采用光电传感器CNY70, 将一个CNY70安装在小车前端