ROBOLAB常识
白猫产品知识点总结

白猫产品知识点总结白猫是一款流行的手机游戏,由日本公司Colopl开发和发行。
游戏以收集和培养各种可爱的猫咪为主题,深受玩家喜爱。
在游戏中,玩家需要通过收集各种猫咪、培养它们、赢得比赛等方式来提高游戏中的等级,获得游戏资源和奖励。
白猫产品知识点包括游戏内容、玩法、道具、活动等方面。
以下是对这些知识点的详细总结:游戏内容:白猫是一款模拟猫咪的收集养成游戏。
游戏中包括了数百种不同种类的猫咪,每种猫咪都有自己独特的外观和技能。
玩家需要不断收集各种猫咪,并通过培养它们,提升它们的能力和等级。
游戏中还包括了众多的游戏模式,每种模式的玩法都不同,玩家可以根据自己的喜好选择不同的模式进行游戏。
玩法:在白猫游戏中,玩家可以通过完成各种任务和挑战来获得游戏资源和奖励。
任务和挑战的难度和奖励也各不相同,玩家需要不断提升自己的实力和技能,才能通关并获得丰厚的奖励。
游戏中还有大量的剧情和故事模式,玩家可以通过完成主线任务来了解更多有关猫咪世界的故事。
道具:白猫游戏中还包括了各种道具。
道具可以帮助玩家提升猫咪的能力,加速猫咪的成长和升级,或者在游戏中获取更多的资源和奖励。
玩家可以通过游戏中的商城或者活动来获取各种道具,提升游戏体验。
活动:白猫游戏中还定期举办各种活动,包括限时活动、节日活动、联动活动等。
在活动中,玩家可以获得丰厚的奖励和稀有的猫咪,还可以参加各种有趣的游戏活动和挑战。
活动的内容和奖励每次都不相同,玩家需要密切关注游戏公告和活动页面,第一时间参与活动。
总结:白猫是一款内容丰富、玩法多样的手机游戏,深受猫咪爱好者的喜爱。
在游戏中,玩家可以收集和培养各种可爱的猫咪,参与不同的游戏模式和活动,获得丰厚的奖励和道具,提升自己的实力和技能。
希望以上总结对玩家了解白猫游戏有所帮助,欢迎大家加入我们的猫咪世界,一起体验不一样的游戏乐趣!。
ROBOLAB摄像头使用指南

ROBOLAB摄像头使用指南在任一级别的ROBOLAB编程环境中都可以使用乐高摄像头。
当需要使用时,可以打开一个多媒体窗口,来显示摄像头中看到的图像。
在导航者级别的编程环境中,摄像头的多媒体窗口是导航者窗口的一部分。
在发明家级别的编程环境中,摄像头使用一个全新的名为影像中心的独立的窗口。
影像多媒体窗口在导航者级别中,使用摄像头来看机器人移动时碰到的事物是一件非常有趣的事情。
通过一个连接在你计算机的USB接口上的摄像头,影像多媒体窗口可以让你看摄像头拍摄的图像,调整和保存需要的图像。
选择摄像头——导航者级别和发明家级别导航者级别每次打开影像多媒体窗口时,ROBOLAB就会检查是否已经选择了摄像头。
如果没有选择过,就会自动打开摄像头选择窗口。
发明家级别在发明家级别中选择摄像头,可以使用窗口中“Project”菜单中的“Select Camera”功能来选择摄像头。
ROBOLAB会记住你选择的摄像头的类型,以后每次使用摄像头的时候,ROBOLAB都会选择这种类型的摄像头。
选择摄像头窗口的扩展选项可以让你打开附加的设置摄像头选项,对摄像头进行设置。
设置摄像头点击设置摄像头按钮会打开一个窗口,让你调整你的摄像头的设置。
每种摄像头的设置窗口都不相同,但是它们都有相同的特征。
暂停图像单击这个按钮会将影像多媒体窗口中当前的图像冻结。
窗口中的图像将不会继续更新,直到取消对暂停按钮的选择。
保存图像单击这个按钮会将影像多媒体窗口中当前的图像保存下来。
一个新的对话框会自动的弹出,你可以为图片命名以及选择存储位置。
图像是以BMP格式进行保存的。
保存好的图片可以在其它的地方调用,例如ROBOLAB的研究者级别实验报告中使用。
关于影像多媒体窗口和导航者中的ROBOLAB程序之间有一些重要的注意事项。
在导航者中,程序和摄像头完全是互相独立的。
导航者程序下载到RCX中时,不带有摄像机的信息。
摄像头的USB接头时连接在电脑的USB接口上的。
乐高ROBOLAB教程chapter02

固定在机器人上),纸夹位于中线的上方。当教师击掌或者发出任何声音被 NXT 侦测到, 启动机器人时,比赛开始。竞赛使用单循环淘汰制决定胜负。如果双方机器人在 10 秒 钟内没有任何动作,老师将宣布此次竞赛为平局。
D: 无特点
F: 未搭建可以演示的东西
F: 惨不忍睹
与以往一样,你必需得到“B—”或更好的成绩才能获取“技能牌”。
7
此书授权西觅亚翻译。版权所有
基于乐高组件和 ROBOLAB 软件的工程教学
第二章
2.1.6 穿越隧道
挑战:使用导航者级别 4 或发明家级别 4,设计、搭建一辆小车并编程,使其进入到较 黑的隧道中自动打开前车灯。你可以使用发明家级别或导航者级别,根据你选择的级别 获得相应的“技能牌”。
机器人设计: 只有三个约束条件: 1) 必须用声音传感器来启动机器人; 2) 最多可以使用三个马达; 3) 你的机器人必须可以连一根绳子(具体形式由自己决定); 4) 你的机器人应该小于 9 立方英寸的正方体;
设计时应当考虑: 齿轮传动比、摩擦、机器人的重心。
编程: 此项目的程序非常简单。你的机器人应当等声音传感器发出信号时再驱动马达。每 队允许有失败的启动。
技能牌:
初级导航者或
初级发明家或
编程基础
步骤:
实验设置: 这个挑战你所需要的是一个可以行走的空旷的区域和一位盲人来测试作品(可以是 教师)。
机器人设计: 这个项目并没有真正涉及到机器人的本质。你的作品是创造一个设备来帮助视觉上 有困难的人在房间里导航—一种高科技来代替古老的白藤条。
robolab图标说明
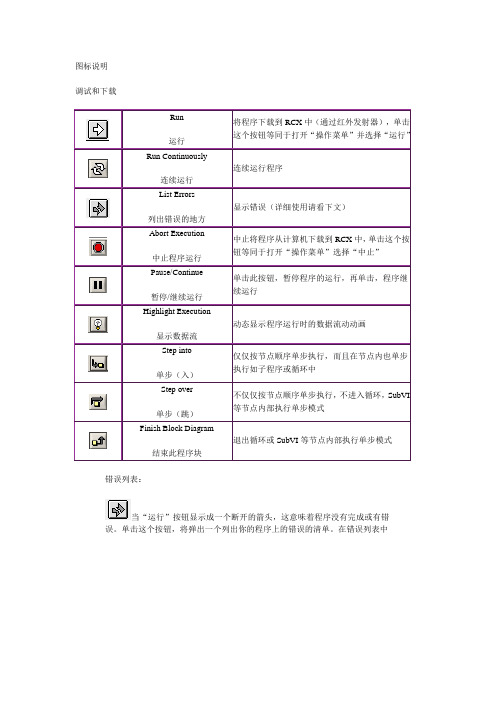
图标说明调试和下载错误列表:当“运行”按钮显示成一个断开的箭头,这意味着程序没有完成或有错误。
单击这个按钮,将弹出一个列出你的程序上的错误的清单。
在错误列表中单击错误内容,然后单击“Find”按钮,程序中有问题的区域或图表将加亮显示如下图。
ROBOLAB的线条类型细心的读者可能已经发现,在ROBOLAB中,由多种颜色的线条,这样可以让我们更容易理解。
下面就给出在ROBOLAB中线条类型的总结。
获得帮助在ROBOLAB中,如果需要帮助,可以在菜单中选择HELP--〉Show Help,或按CTRL+H,将出现一个帮助窗口,如下图这时,只需要将鼠标指针停在某一图标,将会出现这个图标的信息。
另外,帮助下窗口左下角的图标分别表示:复杂/简单帮助切换。
是否锁定帮助,如果选择锁定,那么帮助窗口将不会跟踪鼠标,也就是说,帮助窗口不会随鼠标移动而变化在ROBOLAB软件中有6种编程模块: 端点、输入、输出、流程控制、处理端点标明程序的起始和终结。
为了形象起见采用日常的红绿灯概念,将程序中起始形象的表示为绿灯行,用红灯停来表示程序的终结。
在一个ROBOLAB程序中只可以有一个绿灯起始端点,但是可以有多于一个红灯终结(在多任务时,但不超过10个)。
输入RCX有三个输入端口,可以等待接在这些输入端口的传感器(例如触动传感器、角度传感器、温度传感器和光电传感器等)为RCX提供输入,其他RCX发送来的邮件,定时器, 等候一个确定的时间这些也可以作为输入.随机时间,圆周,TIPS:传感器都默认安装在端口1上,如果安装在其他端口,必须指定,请参考后面的输入端口。
输出可以控制马达、灯、音乐鸣叫,通信也可以作为输出。
动力输出(Power Output):Piano输出可以控制马达、灯、音乐鸣叫,通信也可以作为输出。
高级动力输出(Advance Power Output):输出可以控制马达、灯、音乐鸣叫,通信也可以作为输出。
通信(Comunication):*更多的通信功能将在高级应用中的“RCX相互通信”一节中介绍流程控制逻辑结构流程控制分支与合并(Fork & Merge)(相当于If条件语句)在ROBOLAB中,使用了分支与合并来实现条件选择。
大海贼探险物语知识点
大海贼探险物语知识点大海贼探险物语是一款备受欢迎的游戏,让玩家在虚拟世界里体验海盗的冒险和探索。
本文将介绍一些与大海贼探险物语相关的知识点,帮助读者更好地了解这款游戏的背景和玩法。
1. 游戏背景大海贼探险物语设定在一个由岛屿组成的虚拟世界,玩家扮演一名年轻的海盗,探索各个岛屿,寻找宝藏并与其他海盗展开战斗。
游戏中的岛屿丰富多样,有炎热的沙漠岛屿、茂密的丛林岛屿以及寒冷的雪山岛屿等等,每个岛屿都有独特的地理环境和挑战。
2. 登陆与船舶在大海贼探险物语中,玩家需要选择一个岛屿作为基地,并建立自己的船舶。
船舶是探险的关键工具,用来在岛屿之间航行,寻找宝藏和与其他玩家交流。
玩家可以通过完成特定任务或击败其他海盗来获得更好的船舶,并升级其性能和能力。
3. 战斗系统游戏中的战斗系统是大海贼探险物语的核心玩法之一。
玩家需要与其他海盗进行战斗并夺取他们的财宝。
战斗可以分为近战和远程两种方式,玩家可以使用各种武器和道具来攻击敌人。
战斗胜利后,玩家将获得金币、经验和装备等奖励,可以用来提升自己的能力。
4. 探索与任务除了战斗,大海贼探险物语还注重探索和任务系统。
玩家可以在各个岛屿上进行探险,发现隐藏的宝藏和任务。
任务通常要求玩家完成一系列的任务目标,如打败特定的敌人、寻找特定的物品等。
完成任务后,玩家将获得丰厚的奖励和经验,有助于提升角色的等级和能力。
5. 经济与交易在游戏中,经济和交易也是非常重要的一部分。
玩家可以通过捕捉海洋生物、探索岛屿和战斗来获得金币。
金币可以用来购买武器、装备和船只等物品,提高角色的能力和实力。
此外,玩家还可以参与交易活动,与其他玩家进行物品交换,赚取更多的金币。
6. 社交与团队合作大海贼探险物语也注重社交与团队合作。
玩家可以加入公会或创建自己的团队,在探险中与其他玩家合作,并共同完成任务和挑战。
团队合作可以提升游戏的乐趣,也可以获得更好的奖励和成就感。
通过以上介绍,相信读者对于大海贼探险物语有了一定的了解。
射击flash游戏robokill2介绍以及过关地图
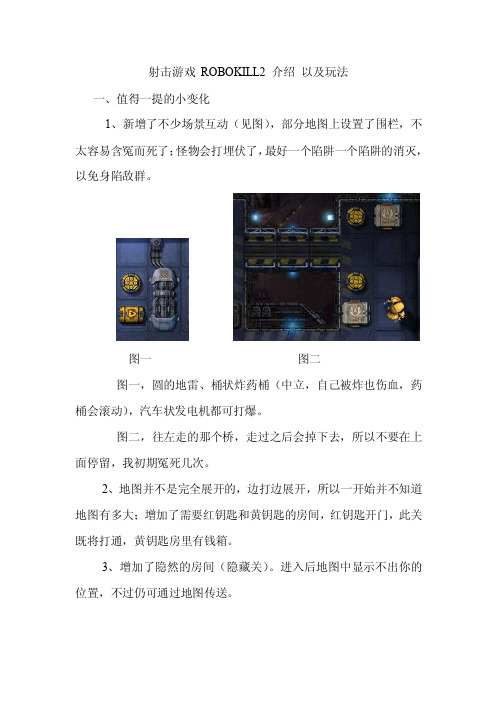
射击游戏ROBOKILL2 介绍以及玩法一、值得一提的小变化1、新增了不少场景互动(见图),部分地图上设置了围栏,不太容易含冤而死了;怪物会打埋伏了,最好一个陷阱一个陷阱的消灭,以免身陷敌群。
图一图二图一,圆的地雷、桶状炸药桶(中立,自己被炸也伤血,药桶会滚动),汽车状发电机都可打爆。
图二,往左走的那个桥,走过之后会掉下去,所以不要在上面停留,我初期冤死几次。
2、地图并不是完全展开的,边打边展开,所以一开始并不知道地图有多大;增加了需要红钥匙和黄钥匙的房间,红钥匙开门,此关既将打通,黄钥匙房里有钱箱。
3、增加了隐然的房间(隐藏关)。
进入后地图中显示不出你的位置,不过仍可通过地图传送。
图四图中黄色单词:stand here 站上去就可进入隐藏关。
4、空中的怪物巢穴无限出怪,方便刷经验,下面会详细介绍。
二、新增加的道具图五:一代六大道具1、一代六大道具归为B类,被动类,自动施展,无需操作。
左起第一个是最实用的道具,本作中得到加强,最大数值由一代的48升到了96,一个顶过去俩。
其他道具无变化。
2、二代九大道具归为A类,主动类,需要手工操作。
按1和2,或者shift和空格键使用。
图六:二代九大道具具体作用,从左至右,从上至下,一一列举,1号,可以召唤两个空中炮台帮你打怪,实战中可四个并存,但是自己火力强大后作用下降。
2号,没什么用,招唤一下空中炮台,不过作用是固定住敌人。
3号,没什么用,在地上放地雷,怪物走地雷爆炸。
4号,有用,给自己加上能量护罩。
往房间里冲时开一下,就不会立仆了。
5号,没什么用,招唤自杀机,自杀机会选择房间里最强大的敌人去爆。
6号,有用,电磁冲击波,可破坏房间内的机械单位,包括炮台、传送门。
7号,没什么用,放冲击波,伤害并震退近身敌人(包括空中)。
8号,没什么用,放波,震晕附近的地面部队。
9号,有用,磁力腰带,把房间里的钱、武器、钥匙全吸过来。
用了你就不想换,会变懒。
三、新增加的武器及武器特殊技能的变化武器特殊技能的变化:Rate of Fire 提升射速和Bullet Speed 增加子弹飞行速度这两个技能有变化,比如你打到一个Rate of Fire 20% ,此技能的最大值,极品了吧。
matlab中robotics_toolbox的函数解说
matlab中robotics toolbox的函数解说1. PUMA560的MATLAB仿真要建立PUMA560的机器人对象,首先我们要了解PUMA560的D-H参数,之后我们可以利用Robotics T oolbox工具箱中的link和robot函数来建立PUMA560的机器人对象。
其中link函数的调用格式:L = LINK([alpha A theta D])L =LINK([alpha A theta D sigma])L =LINK([alpha A theta D sigma offset])L =LINK([alpha A theta D], CONVENTION)L =LINK([alpha A theta D sigma], CONVENTION)L =LINK([alpha A theta D sigma offset], CONVENTION)参数CONVENTION可以取‘standard’和‘modified’,其中‘standard’代表采用标准的D-H参数,‘modified’代表采用改进的D-H参数。
参数‘alpha’代表扭转角,参数‘A’代表杆件长度,参数‘theta’代表关节角,参数‘D’代表横距,参数‘sigma’代表关节类型:0代表旋转关节,非0代表移动关节。
另外LINK还有一些数据域:LINK.alpha %返回扭转角LINK.A %返回杆件长度LINK.theta %返回关节角LINK.D %返回横距LINK.sigma %返回关节类型LINK.RP %返回‘R’(旋转)或‘P’(移动)LINK.mdh %若为标准D-H参数返回0,否则返回1LINK.offset %返回关节变量偏移LINK.qlim %返回关节变量的上下限[min max]LINK.islimit(q) %如果关节变量超限,返回-1, 0, +1LINK.I %返回一个3×3 对称惯性矩阵LINK.m %返回关节质量LINK.r %返回3×1的关节齿轮向量LINK.G %返回齿轮的传动比LINK.Jm %返回电机惯性LINK.B %返回粘性摩擦LINK.T c %返回库仑摩擦LINK.dh return legacy DH rowLINK.dyn return legacy DYN row其中robot函数的调用格式:ROBOT %创建一个空的机器人对象ROBOT(robot) %创建robot的一个副本ROBOT(robot, LINK) %用LINK来创建新机器人对象来代替robotROBOT(LINK, ...) %用LINK来创建一个机器人对象ROBOT(DH, ...) %用D-H矩阵来创建一个机器人对象ROBOT(DYN, ...) %用DYN矩阵来创建一个机器人对象2.变换矩阵利用MATLAB中Robotics Toolbox工具箱中的transl、rotx、roty和rotz可以实现用齐次变换矩阵表示平移变换和旋转变换。
Robo Defense 攻略
这是点开游戏的最初画面,六个英语分别对应新游戏,返回游戏,成就,奖励分数,credits,好像是荣誉信誉之类意思,没啥用感觉,最后就是退出,rewaed points earend:7230297就是我现在的奖励分,这个奖励分可以在Rewrd points 中使用提升你防塔的威力。
Upgrade升级的意思,这里可以升级子弹,炮弹的威力,射速,还有减速的范围。
奖励更多的话还可以解锁新技能,感觉最先解锁Uranium shells,napalm shells 比较好,铀弹壳有忽略防御的功能,汽油弹能燃烧火力伤害。
下面进入游戏,游戏最初金钱和血量是用奖励升的。
游戏中敌人有小兵这是最容易消灭的,胖兵速度慢但是抗揍,机械狗速度快,要想前期比较顺利的消灭它,可以吧5块的枪塔升级一下,那样打就比较容易。
快速战车,速度快,枪塔对其伤害较弱,可以用20块的rocket来打表容易,有钱的话也已吧20块的塔花50块升成mortar,那样效果更好,坦克也抗揍,但是速度很慢一般不会造成很多失血。
还有一种地面敌人,我叫塔小泰坦吧,速速最慢,但是最抗揍,需要很强的火力才能消灭它。
9关之前空中敌人有直升机,这个用5块的塔升级的高射炮就可以对付,然后就是战斗机了,速度快,相对较抗揍,一般防控导弹才能较好的消灭它们,还有就是轰炸机了速度相对较慢,但抗揍需要较多防控导弹才能很好的消灭。
10级后会出现可以空投小兵的飞机,也要火箭弹大量导弹才能很好的消灭。
因为我玩了挺久了所以操作设置为可以一直加速,这个可以根据你的操作自己选,我觉得这样比较节省时间。
最便宜的塔5块,可以升级成图中的三个,每个初级的塔可以升级两次,威力逐步提升,这三个升级品中,flame tower只能对付地面敌人,antiair cannon可用于前期防控。
20块的rocket可以升级为这三个,同样可以升级两次,其中mortar只能对付地面敌人,是最强力的地面堡垒,对各种地面敌人伤害显著,,是防御大队快速战车的必备。
乐高ROBOLAB教程chapter03
第 三 章本章可获得的“技能牌”结构跳转循环分支容器数学定时器任务初级发明家创建传感器开始/结束编程上传观察计算3.1 白带挑战白带设计挑战的所有项目是假定你已获得了全部绿带的“技能牌”而制定的。
3.1.1 乐高蟑螂挑战:设计,制作并且为机器人编程,使它能够模仿蟑螂在黑暗中行动,以及它在见到光亮后逃跑的行为。
技能牌:和步骤:实验设置:没有特殊的设置要求,只要能够空出房间来让机器人行走,并且有灯光能够开关。
机器人设计:机器人的基础设计是一辆有两轮或者更多轮子的小车(如果做得更好,就用腿),一个光电传感器(由你自己决定光电传感器放置的方向)。
编程:在图3.12和3.40中有乐高蟑螂的程序举例。
你的程序将会需要使用容器,所以你的蟑螂要学会区分开灯和关灯的区别。
你的程序应该利用循环来代替在例子中使用的跳转(因为在程序中使用循环是个好的习惯)。
教师会打开教室里的灯,所以你的蟑螂在它逃跑前,它的光电传感器应该来存储一下灯亮时的值。
当灯关闭时,你的蟑螂应该很聪明地知道灯已经关闭了,并且开始觅食。
使用循环,这样你的蟑螂就不会永远走下去了(比如说,它最终会感到疲倦并且停下来)。
成绩中,机器人的准确度和程序占 50%,创意和美观占50%。
精确度 创新和美观A:你的蟑螂仿真的像真的蟑螂一样,并且你的程序是你自己编写的(使用容器和循环)。
B: 你的程序使用了容器或者循环,但是并没有总是工作。
C: 你修改并使用了例子中的程序(使用容器或者循环,但没有两者都使用)。
D: 你使用了例子程序中的一条来使你的蟑螂对亮和暗有反应(既没有使用容器也没有使用循环)。
F: 你没有在教室里完成任务。
A+:最好 A:卓越B:好C:不错D:无特点 F:惨不忍睹容器结构3.1.2走迷宫机器人挑战:设计、搭建并编程一个机器人,使之能通过一个迷宫;不允许用死估算法(注:根据迷宫的具体线路设定死机器人的行走程序)作为导航方式,老师会给你 关于你必须使用的程序类型的进一步说明。
bfv robot规则
bfv robot规则BFV Robot 规则是一个针对机器人编程和竞赛的规则体系,旨在提供一个公平、公正的竞赛环境,让参赛者能够展示他们的机器人技术和创新思维。
以下是 BFV Robot 规则的一些关键要点:1. 竞赛目标:BFV Robot 规则将重点放在技术挑战和策略运用上,鼓励参赛者通过解决实际问题和创新解决方案来展示他们的技能。
2. 机器人规格:规则规定了参赛机器人的基本规格,包括机器人的尺寸、重量、动力等方面的限制。
这些限制是为了确保所有参赛者都在一个相对公平的起跑线上。
3. 任务与挑战:竞赛的核心是各种任务和挑战。
这些任务和挑战旨在测试机器人的技术性能、自主导航、传感器应用、路径规划等方面的能力。
4. 编程语言与软件:规则允许参赛者使用多种编程语言和软件工具来开发他们的机器人。
但是,为了避免不公平的优势,规则还规定了哪些软件和工具是禁止使用的。
5. 安全规定:为了确保竞赛的安全进行,BFV Robot 规则制定了严格的安全规定。
这些规定涵盖了机器人的设计、材料选择、操作过程等多个方面。
6. 评分与排名:根据机器人在任务和挑战中的表现,裁判员会给出相应的分数。
最终,根据总分排名,确定获胜者。
评分的标准不仅包括技术性能,还包括创新性、美观性和实用性等方面。
7. 合规性与公平性:为了确保竞赛的公正性,BFV Robot 规则要求所有参赛者都必须遵守规则,禁止任何形式的作弊行为。
同时,规则还设立了裁判委员会来监督整个竞赛过程。
总之,BFV Robot 规则是一个全面而细致的竞赛规范,旨在为参赛者提供一个公平、公正、富有挑战性的竞赛环境。
通过这一规则的实施,能够激发人们对机器人技术的热情和创新精神,推动机器人技术的发展和应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ROBOLAB常识
机器人随处可见,与我们的生活息息相关,是它们,使我们的生活更加轻松。
机器人还将帮我们从事许多对于人类来说太单调乏味或危险的工作中解脱出来。
现在,有了LEGO Dacta的新的ROBOLAB产品,学生们自己就可以在课堂上设计制造机器人和机器人系统了。
使用ROBOLAB系统,学生们可以创造、搭建、编程真正的机器人,并让这些自动设备移动、行动、甚至自己去“想”。
ROBOLAB系统的大脑是RCX(机器人指令系统),这是一块可编程积木,是所搭建模型的基础,用它来控制机器人的行动。
对RCX编程,控制一系列输入(传感器)和输出(马达和灯),来响应周围环境。
RCX包括:
3路输入端口,3路输出端口,4个控制按钮,一个LCD显示屏,一个AC(交流)适配器连接器(变压器)和一个红外传输(发送/接收)器。
可用6节直流电池或一个变压器对RCX供电。
3路输入端口是RCX与LEGO Dacta传感器(如触动、光电、温度及旋转传感器等)的连接点,3路输出端口则是用于连接LEGO输出器件(如马达和灯)的。
4个控制按钮分别用于控制RCX的开/关、程序选择、观测RCX工作情况及执行选定的程序。
RCX与计算机的通信是通过IR发射器进行的,该发射器插在计算机的串口上,通过它,将程序传给RCX。
可以用初级教学软件对RCX编程。
LEGO Dacta 传感器和激励源
传感器
1.角度(位置)传感器——机电数字传感器,连接到LEGO DACTA接口中任一个蓝色输入通道(5~8)。
这是一种数字传感器,可分16步测量一次变化。
利用该传感器,你可以:——测试元件的旋转方向
——发送一个运动,测量旋转位置
注意:不要将马达直接联接到位置传感器,否则会大大缩短传感器使用寿命。
2.光电传感器——非机电模拟传感器,需连接到LEGO DACTA接口中任一个蓝色输入通道(5~8)。
这是一种模拟传感器,测试范围0.6Lux(0%) ~760Lux(100%).利用该传感器,你可以:——通过检测光强变化计数人数
——通过测试反向光强来辨别颜色
——测量一个光源的光强
3.温度传感器——非机电模拟传o感器,需连接到LEGO DACTA接口中任一个黄色输入通道(1~4)。
这是一种模拟传感器,可测量0oC~+50oC的温度。
4.触动传感器(开关)——非机电数字传感器开关,需连接到LEGO DACTA接口中任一个黄色输入通道(1~4)。
这是一种有两种触动方式的数字开关
将相同颜色的输入连接器与传感器相连接,可连到LEGO积木。
积木块的电缆应该朝向下,以实现与软件的正确通信。
激励源
1.马达
9伏直流供的电马达是一激励源,可连接至LEGO DACTA接口的A~H输出端口任一个。
可通过软件对马达进行如下控制:
-正向旋转,停止;
-反向旋转,停止;
-改变旋转方向;
-加速或减速
2.灯
9直流电流的灯是一激励源,可连接至LEGO DACTA接口的A~H输出端口中的任一个,可通过软件对灯进行如下控制:
-开/关
-以用户定义的时间频率闪烁
-改变发光强度
3.声音元件(蜂鸣器)
9伏直流供电的蜂鸣器是一激励源,可连接至LEGO DACTA接口的A~H输出端口中的任一个,可对蜂鸣器进行如下控制:
-开/关
-发出两种声音
利用软件控制,需将蜂鸣器转到正确位置,才能使软件响应实际声音。
在正确的位置时,将蜂鸣器连接到LEGO DACTA接口的测试通道是,它会发出“WEEWEE”的声音。
LEGO DACTA接口明16个数字输出。
每个激励源使用两路输出。
所以有8个通道(A~H)可连接激励源。
积木块的电缆应该朝向下,以实现与软件的正确通信。