AFS60高精度单圈绝对值编码器_AFM60高精度多圈绝对编码器_E
旋转编码器的类型区别与应用选择

旋转编码器的类型区别与应用选择旋转编码器是一种经过验证的常用解决方案,适用于测量旋转轴的速度、运动方向或位置。
旋转编码器分为多种不同的类型,最主要的两种类型是绝对编码器和增量编码器。
它们的工作原理分别如何?有哪些区别?如何为应用选择适合的类型?编码器工作原理顾名思义,绝对编码器会直接输出正在测量的轴的确切位置。
每个旋转点都具有唯一的位置值或数据字,并在随轴一起旋转的码盘上编码。
码盘上唯一代码的数量决定了位置的表示精度。
编码器一旦开启,便立即使用光学、电容式或磁性传感器读取代码,并生成有效的输出。
而且,无需建立参考点或转动轴,传感器便能确定位置,并且即便编码器临时掉电,也能持续跟踪位置。
图1:绝对编码器的码盘为每个位置提供唯一代码,从而实现有效的即时输出,并确定编码器的分辨率。
(图片来源:CUI, Inc.)编码器的分辨率以位表示,对应于一圈内的唯一数据字数量。
绝对编码器可分为单圈和多圈两种类型,其中单圈版本提供一整圈(360°) 的位置数据,并且在轴的每一圈旋转中重复提供。
多圈类型包含一个转数计数器,能让编码器不仅输出轴位置,还能输出圈数。
下面是增量编码器:根据轴旋转时产生的脉冲来工作。
输出通常是两个相位差为90°的方波,并且需要额外的电路对这些脉冲进行跟踪或计数。
图2:增量编码器产生具有90°相位差的脉冲波形。
(图片来源:CUI, Inc.)增量编码器的分辨率以每转脉冲数(PPR) 表示,相当于任一方波输出的高脉冲数。
您可以阅读CUI 关于PPR 的博客文章,了解有关此主题的更多信息。
通过仔细观察图2,您会发现其中只有四个不同的重复输出状态。
因此,增量编码器必须以已知的固定位置为参考,才能提供有意义的位置信息。
这个“起始”位置就是编码器的索引脉冲。
然后通过跟踪旋转中相对索引脉冲的增量变化,来计算轴的绝对位置。
每次开。
AFS60_AFM60 PROFINET高精度绝对编码器

机械接口 B 盲孔轴 8 mm C 盲孔轴 3/8" D 盲孔轴 10 mm E 盲孔轴 12 mm F 盲孔轴 1/2" G 盲孔轴 14 mm H 盲孔轴 15 mm K 盲孔轴 1/4"
电气接口 N PROFINET
连接方式 B 3 x M12,4 芯,轴向
± 0.03°
± 0.002°
接口
总线接口 数据传输速率 初始化时间 传输介质 循环轴功能 编码器设备子协议
PROFINET IO / RT Class B 10/100 Mbit/s 约 12 s CAT-5e 电缆 m V4.1 Class3
机械参数
允许转速 1)
实心轴 9,000 R/min (请参见第 6 页“最大允许转速”)
盲孔轴 6,000 R/min (请参见第 6 页“最大允许转速”)
质量
0.2 kg
最大轴负载(实心轴)
80 N (径向) 40 N (轴向)
传动元件的允许位移(盲孔轴)
± 0.3 / ± 0.05 mm (径向,静态/动态位移) ± 0.5 / ± 0.1 mm (轴向,静态/动态位移)
转子的转动惯量
• 连接方式:3 x M12 轴向插头 • PROFINET-IO-RT 接口
• 数据更新时间:< 5 ms • 循环轴功能 • 速度、位置、温度、工作时间等的警
告、报警与诊断功能
• 5 个 LED 状态指示灯
优势
• 智能诊断功能与高速数据传输,提升 生产效率
• 错误及早检测,提升网络稳定性 • 多种配置选项,简化安装 • 基于循环轴功能的二进制、整数与小
型号 AFS60A-S1NB262144 AFS60A-S4NB262144
SICK绝对式编码器
R=最 小 弯 曲 半 径4 0 mm
其 它 公 差 遵 循DIN ISO-2768-mk标准
出线方式 径向出线式
径向插头式
附件 接线电缆 通孔轴套 S S I串 口 转 并 口 模 块
C1-6
技术参数
机械参数
外径 轴径 启 动 转 矩( 2 0℃) 工 作 转 矩( 2 0℃) 瞬时惯量 最大允许转速 最大角加速度 元件轴允许跳动
轴向出线式
径向插头式
轴向出线式
技术参数
机械参数
外径 轴径 启 动 转 矩( 2 0℃) 工 作 转 矩( 2 0℃) 瞬时惯量 最大允许转速 最大角加速度 元件允许轴跳动
轴承使用寿命 工作温度 存储温度 允 许 相 对 湿 度1) 抗振性能
外壳防护等级 IEC 60529
质 量5)
A R S 6 0盲 孔 型
电气参数
工作电压 工作电流
测量量程 分辨率 角度分辨率 测量误差
重复精度 角度分辨率偏差
测量值回差 响应阈值 输出接口 输出码
编 码 方 向6) “控制输入”的 "电 脉 冲"信 号 零 位 设 定 时 间7) 上电初始化时间 EMC8)
10-32V DC SSI:60mA 并 口:90mA
1圈
2...32,768(参见 订货 信息) 360°/分辨 率 2 n 分 辨率: 0.035° 非2 n 分 辨 率: 0.046° 0.005° 2 n 分 辨 率: 0.005° 非2 n 分 辨 率: 0.016°
分辨率 1...32,768
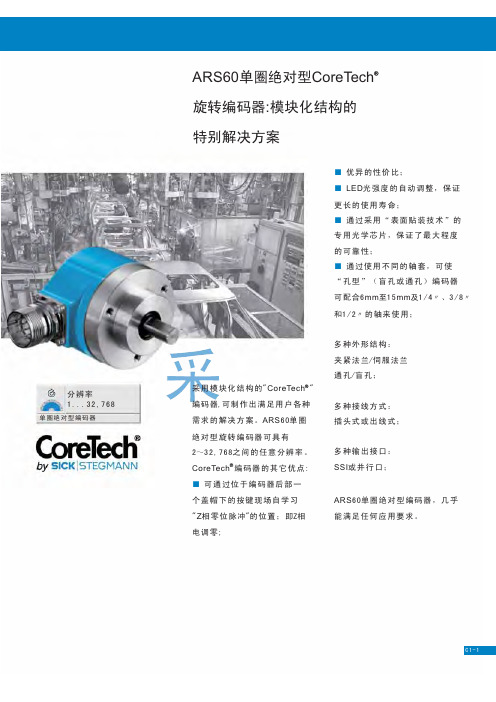
单圈绝ch 旋转编码器:模块化结构的 特别解决方案
■ 优异的性价比; ■ LED光 强 度 的 自 动 调 整 , 保 证 更长的使用寿命; ■ 通过采用“表面贴装技术”的 专用光学芯片,保证了最大程度 的可靠性; ■ 通过使用不同的轴套,可使 “孔型”(盲孔或通孔)编码器 可 配 合6mm至1 5mm及1/ 4〃 、3 / 8〃 和1/2〃 的 轴 来 使 用 ;
多圈绝对值编码器

IN
Ue
⊥
过滤器
逻辑
下拉
计数方向输入 (V/R)
IN
Ue
⊥
上拉
过滤器
逻辑
附件
适用型号
附件 联轴器
AVM58*-011
圆周为 500 mm 的测量轮 圆周为 200 mm 的测量轮 安装附件
AVM58*-032
联轴器
安装附件
全部
连接
更多附件信息请参考 “附件”章节。
命名 / 规格特性 D1: Ø10 mm, D2: Ø10 mm D1: Ø10 mm, D2: Ø10 mm D1: Ø10 mm, D2: Ø10 mm D1: Ø10 mm, D2: Ø10 mm 塑料 橡胶 滚花铝盘 滚花塑料盘 塑料 橡胶 滚花铝盘 滚花塑料盘 安装支架 安装支架 D1: Ø6 mm, D2: Ø6 mm D1: Ø6 mm, D2: Ø6 mm D1: Ø6 mm, D2: Ø6 mm D1: Ø6 mm, D2: Ø6 mm D1: Ø6 mm, D2: Ø6 mm 安装罩壳和组件 偏心夹具 电缆插座 电缆插座
SSI 信号输出标准模式
时钟 + 数据 +
T
Dn MSB
Dn-1
Dn-2
Dn-3
D1, ..., Dn: S: MSB:
LSB:
位置数据 标志位 数据高位 数据低位
Tp
Tm
D2
D1
S
LSB
T = 1/f:
Tm: Tp:
时钟周期 ≤ 1 MHz 单稳态触发时间 10 μs ... 30 μs 时钟间隙 ≥ 单稳态触发时间 (Tp ≥ Tm)
订货型号 9401 9404 9409 KW 9101, 10 9102, 10 9103, 10 9112, 10 9108, 10 9109, 10 9110, 10 9113, 10 9203 9213 9401 9402 9404 9409 KW 9300 和 9311-3 9310-3 9416 9416L
AFS-AFM60-Ethernet-IP快速指引-AB

AFS/AFM60 Ethernet IP 快速快速指引指引目录1.Ethernet/IP通讯 (3)2. AFS/AFM60机械安装 (4)2.1 盲孔型 (4)2.2 夹紧法兰型 (4)2.3 伺服法兰型 (5)3. AFS/AFM60电气安装 (5)3.1 电气接口定义 (5)3.2 以太网电缆制作 (6)4. AFS/AFM60通讯配置 (7)4.1 IP地址设定 (7)4.2 Rockwell软件配置 (9)5. AFS/AFM60常用功能 (14)5.1 分辨率比例缩放(Resolution/Scaling) (14)5.2 顺时针/逆时针(CW/CCW) (14)5.3 圆轴功能(Round axis) (14)5.4 修改预设值(Set Preset Value) (15)6. AFS/AFM60常见故障处理 (22)1.Ethernet/IP通讯MAC address每一个Ethernet/IP设备都有一个出厂设定好的专属的Mac地址,AFS/AFM60的Mac 地址包括3个字节制造商ID和3个字节的设备ID;IPAFS/AFM60的IP地址出厂默认为通过DHCP分配,也可以通过编码器背部的十进制编码开关设置成一个固定的IP地址(192.168.1.xxx);TCP/IP和UDP/IPEthernet/IP使用TCP/IP和UDP/IP两种传输协议。
UDP/IP用来传输实时信息,例如从编码器到控制器的I/O数据(位置速度);TCP/IP用来传输非实时信息,例如从控制器到编码器的参数配置;CIP应用层使用的是通用工业协议—Common Industrial Protocol有以下术语:• Class:一个设备的相关对象,由多个instance组成;• Instance:一个instance有不同的attribute表示其属性结构,同一个class的instance有相同的service和attribute结构,但attribute value可能不同。
编码器的各种规格
有网友问:增量旋转编码器选型有哪些注意事项?应注意三方面的参数:1.械安装尺寸,包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否满足要求。
2.分辨率,即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。
3.电气接口,编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E),集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。
其输出方式应和其控制系统的接口电路相匹配。
■二.※有网友问:请教如何使用增量编码器?1,增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,数目从6到5400或更高,脉冲数越多,分辨率越高;这是选型的重要依据之一。
2,增量型编码器通常有三路信号输出(差分有六路信号):A,B和Z,一般采用TTL电平,A脉冲在前,B脉冲在后,A,B脉冲相差90度,每圈发出一个Z脉冲,可作为参考机械零位。
一般利用A超前B或B超前A进行判向,我公司增量型编码器定义为轴端看编码器顺时针旋转为正转,A超前B为90°,反之逆时针旋转为反转B超前A为90°。
也有不相同的,要看产品说明。
3,使用PLC采集数据,可选用高速计数模块;使用工控机采集数据,可选用高速计数板卡;使用单片机采集数据,建议选用带光电耦合器的输入端口。
4,建议B脉冲做顺向(前向)脉冲,A脉冲做逆向(后向)脉冲,Z原点零位脉冲。
5,在电子装置中设立计数栈。
■三.※关于户外使用或恶劣环境下使用有网友来email问,他的设备在野外使用,现场环境脏,而且怕撞坏编码器。
我公司有铝合金(特殊要求可做不锈钢材质)密封保护外壳,双重轴承重载型编码器,放在户外不怕脏,钢厂、重型设备里都可以用。
不过如果编码器安装部分有空间,我还是建议在编码器外部再加装一防护壳,以加强对其进行保护,必竟编码器属精密元件,一台编码器和一个防护壳的价值比较还是有一定差距的。
■四.※从接近开关、光电开关到旋转编码器:工业控制中的定位,接近开关、光电开关的应用已经相当成熟了,而且很好用。
绝对值编码器

绝对值编码器简介(Absolute Encoder)绝对值编码器简介(Absolute Encoder)是相对于增量而言的,顾名思义,所谓绝对就是编码器的输出信号在一周或多周运转的过程中,其每一位置和角度所对应的输出编码值都是唯一对应的,如此,便具备掉电记忆绝对之功能也。
绝对式编码器是依据计算机原理中的位码来设计的,比如:8位码(0000 0011),16位码,32位码等。
把这些位码信息反映在编码器的码盘上,就是多道光通道刻线,每道刻线依次以2线、4线、8线、16线。
编排。
如此编排的结果,比如对一个单圈绝对式而言,便是把一周360°分为2的4次方,2的8次方,2的16次方,,,,位数越高,则精度越高,量程亦越大。
这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。
这样的编码器是由光电码盘的机械位置决定的,它不受停电、干扰的影响。
绝对编码器由机械位置决定的每个位置是唯一的,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。
这样,编码器的抗干扰特性、数据的可靠性大大提高了。
单圈绝对值编码器到多圈绝对值编码器旋转单圈绝对值编码器,以转动中测量光电码盘各道刻线,以获取唯一的编码,当转动超过360度时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码只能用于旋转范围360度以内的测量,称之为单圈绝对值编码器。
如果要测量旋转超过360度范围,就要用到多圈绝对值编码器。
编码器生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。
多圈编码器另一个优点是由于测量范围大,实际使用往往富裕较多,这样在安装时不必要费劲找零点,将某一中间位置作为起始点就可以了,而大大简化了安装调试难度。
AFS-AFM60-EtherNet-IP绝对值旋转编码器选型手册(中文版)

3.0 W 10 … 30 V
环境参数
防护等级(依据 IEC 60529 标准)
外壳(带配套插头) IP 67(仅在带配套插头或密封盖)
轴 IP 65
允许相对湿度 1)
90 %
工作温度范围
–30 … +85 °C
存储温度范围(无包装)
–40 … +100 °C
抗振性能
冲击(根据 EN 60068-2-27 标准) 100 g/6 ms
全部三种型号均有夹紧法兰、伺服 法兰及盲孔轴三种机械接口可选,同时 配备通用转矩支架、联轴器、安装罩及 多种类型的插头等等附件,适用于几乎 所有应用。
AFS60/AFM60 绝对值型编码器,EtherNet/IP 接口 | SICK
3
“设备级环网” AFS60/AFM60,EtherNet/IP 接口
B 3 x M12,4 芯,轴向 分辨率
1 8 A 型:单圈 18 位 x 多圈 12 位(出厂编程设定)
AFM6 0 订货示例
–S
0
x12
机械接口 伺服法兰 6 x 10 mm 扁平型夹紧法兰 10 x 19 mm
型号 AFM60A-S1IB018x12 AFM60A-S4IB018x12
订货号 1055362 1055364
8
AFS60/AFM60 绝对值型编码器,EtherNet/IP 接口 | SICK
EtherNet/IP 接口
AFS60/AFM60 绝对值型编码器
订货信息
AFS 单圈绝对值型编码器,实心轴
产品类别
A 每圈最大步数 = 262,144(18 位) 机械接口
1 伺服法兰 6 x 10 mm 4 夹紧法兰 10 x 19 mm 5 圆型夹紧法兰 10 x 19 mm 6 圆型夹紧法兰 3/8" 7 夹紧法兰 3/8"
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
!!ᄚਾଁ ᄩ፺ˈ10 x 19 mm
ݢනਾଁ
ஏਾߴ
!!ࠍשఋ
= 4 4.5 … 32 VˈSSI/ࢆଡ଼బ༕ڵਾଁ = A M23ˈ12 ጦنဂˈჹ ! =! A Ꭱ؞༮
M12ˈ8 ጦنဂˈჹ ! =! C 1.5 m ቂᄲ 8 ᄣݢେ 1˅ ! =! K
A ᄲ – Ꭱღ༮ 000256 = 8 ၤ 000512 = 9 ၤ 001024 = 10 ၤ
001024 = 10 ၤ 002048 = 11 ၤ
002048 = 11 ၤ 004096 = 12 ၤ 008192 = 13 ၤ
002048 = 11 ၤ 004096 = 12 ၤ 008192 = 13 ၤ
ቈ፺ڏৱ ܌30 mmˈ AFM/AFS60 ףబධყޭتቂ ۈ፺؝ڏܿףబධੌࢬ ၓ৮ࢿȃুᏥࡴᎡཨˈ ྋ౦ᇓ૰૦߷ፒܿވ ֦ڵڕܿ൶ज़ከᄵȃ੪࣏ ፺ڏৱˈܐAFS/AFM60 ܿ ိᄳ้ะসၓ۲ˈࢮໟ ࠍᄆܿૼৱ፩ቂȃ
Ꭱ؞༮
ࡒ
!
ਾღࡒ˄ ݕ28 ᇔ˅
Ꭷࡒ˄ ݕ30 ᇔ˅
ڋףન˄ ݕ27 ᇔ˅
ጦਰངಖ˄ ݕ26 ᇔ˅
4
AFS60/AFM60
Ꭱཨ N [Ꭱ/ࠍ]
2011-03 ๒ˈק༰ௐᄵፃ
AFS60/AFM60ˈSSI ਾଁȂSSI + ዓਾଁञ SSI + Sin/Cos ਾଁ
ปુޭፎףబධ
ღ༮ 1 ፚ 65,536
ዓᄲףబධ
Ů!SSIȂSSI + ዓড
!SSI +!Sin/Cos ݢනਾଁ
Ů!૰שࠍށົڋףఋȂዓღ༮Ȃ
TTL ড HTL ᄪखᇵঽᇧ
Ů نဂডݢେڵღ !
ৗٛ൰૰ञဇ
3 x M4 6˄ແ˅
ঢ়ߟୁᄲိᄳ܄ڞဇˈݢେڵღ
0 ... +85 °C –40 ... +100 °C
–30 ... +100 °C –40 ... +100 °C
–30 ... +100 °C –40 ... +100 °C
IP 65 IP 67 IP 67
IP 65 IP 67 IP 67
IP 65 IP 67 IP 67
6) ፑ੶ࣰࡘৱާॄئ༕ڵᄌၤ༮દ 7) ࣰ 12 ጦףబධنဂቪိ૮ოݢනࢉ୰ˈஂ 12 ᄣݢେ 8) تቂࣕᅪኊ୲ܿٛ൰ኧᅒڵო௷ 9) Ꭷി࿄نဂ
A
F
S
6
0
–
S
ٛ൰د˄׳ਈ
!! ݕ3 ᇔ༦د༮˅
!!C !!B
ᄚਾଁ ᄩ፺ˈ10 x 19 mm
!!ݢනਾଁ
!!ஏਾߴ
!!ࠍשఋ!+
=4
4.5 … 32 VˈSSI/ࢆଡ଼!బ༕ڵਾଁ! = P !!M23ˈ12 ጦنဂˈჹ
= A Ꭱ؞༮
!!M12ˈ8 ጦنဂˈჹ !!1.5 m ቂᄲ 8 ᄣݢେ 1˅ ! !!3 m ቂᄲ 8 ᄣݢେ 1˅ ! !!5 m ቂᄲ 8 ᄣݢେ 1˅ !
Ꮵܐ༕ڵ൮ఋ
ࡏኵݢ
30 mA
Sin/Cos ಠਾଁ˄AFM60ˈSSI + Sin/Cos ਾଁ˅
ጸკ፵ඓ 0.5 VPP ك؞
1,024 90° షڤᄪख/ღ༮
Ꮵܐ༕ڵ൮ఋ
200 kHz
ࡏኵݢᏟ
Ꮵᄆ ȍ
ਾଁᄪख Sin +,Sin –,Cos +,Cos –
ٛ൰ᅤჵ˖ ঢ়ߟୁᄲȂཔ࠵ߟୁ ᄲȂృ૾ᄲञ૾ᄲ M12 ড M23 نဂ 1.5 mȂ3 m ড5 m ݢେڵ ოˈჹড፺ჹ ࠍשఋ ˖ܠป 18 ၤˈป Ꮵ ܐ12 ၤ
AFM60 ܿܠปᏥשࠍܐఋ ܸ܌18 ၤˈॆףబධቱ ܿᏥࡴ༽൶˗ৠຢ 12 ၤป ࠍשఋˈඝࠍשఋܸ܌மᇖ ᇄᇄܿ 30 ၤʽ
AFM60 ञ AFS60 ૂ૰ت ቂ SICK ቂ DFS Ⴜளዓᄲ ףబධܿყڋףનᄵף ——ڋጝዓᄲףబධȂܠ ปુޭፎףబධञปુޭፎ ףబධݕᇜ۫ოமቂᇜ ڋףનᄵد༮ົȃ
AFM60 ปુޭፎףబධ ੌࢬ৮ࢿˈࠍשఋࡴ ܌30 ၤˈ ၓᄵᇖົஅமᇜࢋᄧܿᎳȃ ඝఐໍٛ൰ AFS60 ܠปુޭፎ ףబධᇓ߾٢ڵˈܠปࠍש ఋܸ܌ம 18 ၤȃକٛ൰߾ޕ ٢ठࢌ፯ᇋชࡴੴޡȂࡴ ૰૦ᄹ݃૨ᇖ०፩ሥ ቂȃ
2011-03 ๒ˈק༰ௐᄵፃ
AFS60/AFM60
5
AFS60 ܠปુޭፎףబධˈSSI ਾଁˈঢ়ߟୁᄲ
ނতᄪႩ
AFS60 ܠปુޭፎףబධˈঢ়ߟୁᄲ
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
பைடு நூலகம்
A
F
S
6
0
–
S
ٛ൰د˄׳ਈ
!! ݕ3 ᇔ༦د༮˅
ಠˈُࠍ
ُࠍᄪखፎ˄ࡏኵ ȍ ˅ ᄪखᇧ
0.5 VPP ± 20 % 2.5 V ± 10 %
0.09° 4096 ± 0.2° ± 0.2° ± 0.2°
1 MHz
300 kHz
0.01° 32768
± 0.05° ± 0.08° ± 0.01°
0.0014° 262144
± 0.03° ± 0.04° ± 0.008° ± 0.002°
༦د༮˄ࢎદ DIN 32878 Ꮃ˅
ᄚد༮ ፺ ፣ 1) ᎡᏊᎡ࣒ވ ᏮᎡཨ 2) Ꮵܐਲৠཨޡ ᏮᎡડ˄20 °C ˅ තވᎡડ˄20 °C ˅ ፺ܿኧᅒၤᇧ
፺ڏ༊ಛ ૠጬᄹ
10 x 19 mm 0.26 kg 6.2 gcm2 9,000 Ꭱ0ࠍ 5 x 105 rad/s2 0.3 Ncm 0.5 Ncm ჹ ፺ჹ 3 x 109 Ꭱ ૠڤদ 3) ૠጬ ވ4)
ࠍשఋ Ꮵࡴ ܌18 ၤ
ܠปુޭፎףబධ
ࠍשఋ Ꮵࡴ ܌30 ၤ
ปુޭፎףబධ
ღ༮ 1 ፚ 65,536
ዓᄲףబධ
ᅤᄲ༇ق
AFS60˖ܠปુޭፎףబධˈ SSI ਾଁ AFM60˖ปુޭፎףబධˈ SSI ਾଁȂSSI + ዓਾଁञ SSI + Sin/Cos ਾଁ
ঢ়ߟୁᄲိᄳ܄ڞဇˈM12 ञ M23 نဂ
A
3 x M4 Ø 48±0.05 (1.89) 6˄ແ˅
Ø 36 (1.42) f8
Ø 10 (0.39) f7
Ø0.05 B
C 18
(0.71)
40.1 (1.58) 10 (0.39)
A
B 0.03 A
9 (0.35)
19 ±0.3 (0.75)
< 1 μs
EMC 5)
Ꮾݢᅼ
4.5 … 32 V
ૼኵ࢙क
0.5 W
ڴफ़ৱ 6)
50 ms
SSI ᄪखღ 7)
Clock +,Clock –,Data +,Data – SSI ፬൮ఋ 2MHz˗ ডᏥݢ݈ޥ൶ৱ (Clock +)˖500ns
SET˄ݢᏊ˅ݲ
ࡴݢ൶ᄌ˄݈ݢ൶ = 0 - 3 V˗ࡴݢ൶ = 4 - US V˅
0.1 A
7.75 (0.31)
Ø 60 (2.36)
(3x) 120°
13 (0.51)
26.1 (1.03)
14.5 (0.57)
M12 x 1
M23 x1
25° ±2° Ø 0.1 C
ྈܠ܄ڞၤၓ mm˄ሡ˅܄ ቂُ࢞࠲ठ DIN ISO 2768-mk Ꮃ
AFS60/AFM6 ᏥࡴኧᅒᎡཨ࣋Ⴜဇ ᎡཨቪᎡ؞༮ܿ࣋Ⴜ)n*
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
A
F
S
6
0
E
–
S
4
A
C
0
0
1
0
2
4
6
AFS60/AFM60
2011-03 ๒ˈק༰ௐᄵፃ
AFS60 SSI
ނতᄪႩ
AFS60 ܠปુޭፎףబධˈঢ়ߟୁᄲˈ૰ڋף
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
AFS60/AFM60 ঢ়ߟୁᄲ
E
B
A
80 N 40 N
80 N 40 N
80 N 40 N
50 g/6 ms
70 g/6 ms
60 g/6 ms