最优控制第二章习题答案
最优控制胡寿松版部分习题答案

2-5 求通过(0)1x =,(1)2x =,使下列性能泛函为极值的极值曲线*()x t :2(1)ft t J x dt =+⎰解:由题可知,始端和终端均固定被积函数21L x =+,0L x ∂=∂,2L x x ∂=∂, 2d L x dt x∂⋅=∂ 代入欧拉方程0L d L x dt x∂∂-⋅=∂∂,可得20x =,即0x = 故1x c = 其通解为:12x c t c =+代入边界条件(0)1x =,(1)2x =,求出11c =,21c = 极值曲线为*()1x t t =+2-6 已知状态的初值和终值为(1)4x =,()4f x t =式中f t 自由且f t >1,试求使下列性能泛函达到极小值的极值轨线*()x t :211[2()()]2ft J x t x t dt =+⎰ 解:由题可知,2122L x x =+,()4f t ψ=,()14x =,()4f x t = 欧拉方程:L 0d L x dt x∂∂-=∂∂ 横截条件:()00t x =x ,()()f f x t t ψ=,()0fTt L L x x ψ∂⎛⎫+-= ⎪∂⎝⎭易得到2dxdt= 故12x t c =+ 其通解为:()212x t t c t c =++根据横截条件可得:()()()122121114424f f f f f x c c x t t c t c x t t c ⎧=++=⎪⎪=++=⎨⎪=+=⎪⎩解以上方程组得:12569f t c c =⎧⎪=-⎨⎪=⎩将f t ,1c ,2c 代入J 可得5*201500502150233J x x dt =+=-=⎰ 极值轨线为()*269x t t t =-+2-7 设性能泛函为120(1)J x dt =+⎰求在边界条件(0)0x =,(1)x 自由情况下,使性能泛函取极值的极值轨线*()x t 。
解:由题可知,21L x =+,()00x =,()1x 自由欧拉方程:L 0d L x dt x∂∂-=∂∂ 横截条件:()00t x =x ,L 0ft x∂=∂,0fTt L L x x ∂⎛⎫+= ⎪∂⎝⎭易得到()x t a =其通解为:()x t at b =+代入边界条件()f x t a =,()00x =,1f t =,求出0a =,0b = 将f t ,a ,b 代入J 可得()1*211J x dt =+=⎰极值轨线为()*0x t = 2-9 求使泛函22211220(2)J x x x x dt π=++⎰为极值并满足边界条件1(0)0x =,2(0)0x =1()12x π=,2()12x π=- 的极值轨线*1()x t 和*2()x t 。
(完整word版)最优控制理论与系统胡寿松版部分习题答案

2-5 求通过(0)1x =,(1)2x =,使下列性能泛函为极值的极值曲线*()x t :2(1)ft t J x dt =+⎰解:由题可知,始端和终端均固定被积函数21L x =+,0L x ∂=∂,2L x x ∂=∂, 2d Lx dt x ∂⋅=∂代入欧拉方程0L d Lx dt x ∂∂-⋅=∂∂,可得20x =,即0x =故1x c = 其通解为:12x c t c =+代入边界条件(0)1x =,(1)2x =,求出11c =,21c = 极值曲线为*()1x t t =+2-6 已知状态的初值和终值为(1)4x =,()4f x t =式中f t 自由且f t 〉1,试求使下列性能泛函达到极小值的极值轨线*()x t :211[2()()]2ft J x t x t dt =+⎰ 解:由题可知,2122L x x =+,()4f t ψ=,()14x =,()4f x t = 欧拉方程:L 0d Lx dt x ∂∂-=∂∂横截条件:()00t x =x ,()()f f x t t ψ=,()0fT t L L x x ψ∂⎛⎫+-= ⎪∂⎝⎭易得到2dxdt= 故12x t c =+ 其通解为:()212x t t c t c =++根据横截条件可得:()()()122121114424f f f f f x c c x t t c t c x t t c ⎧=++=⎪⎪=++=⎨⎪=+=⎪⎩解以上方程组得:12569f t c c =⎧⎪=-⎨⎪=⎩将f t ,1c ,2c 代入J 可得5*201500502150233J x x dt =+=-=⎰ 极值轨线为()*269x t t t =-+2-7 设性能泛函为120(1)J x dt =+⎰求在边界条件(0)0x =,(1)x 自由情况下,使性能泛函取极值的极值轨线*()x t 。
解:由题可知,21L x =+,()00x =,()1x 自由欧拉方程:L 0d L x dt x∂∂-=∂∂ 横截条件:()00t x =x ,L 0ft x∂=∂,0fT t L L x x ∂⎛⎫+= ⎪∂⎝⎭易得到()x t a =其通解为:()x t at b =+代入边界条件()f x t a =,()00x =,1f t =,求出0a =,0b = 将f t ,a ,b 代入J 可得()1*2011J x dt =+=⎰极值轨线为()*0x t = 2-9 求使泛函22211220(2)J x x x x dt π=++⎰为极值并满足边界条件1(0)0x =,2(0)0x =1()12x π=,2()12x π=- 的极值轨线*1()x t 和*2()x t 。
最优控制期末

. . . . . . . .
. . . . . . .
. .
. .
. .
. .
. .
.
课后习题解答
最优控制理论与系统
December 28, 2014
2 / 46
概念及定理
概念
概念
1
求使泛函 J 取极值的极值轨线 x∗ (t),其中 x(0) = 1, ∫ 1 ˙ 2 ) dt J= (1 + x
0
解:本题为定常系统,tf 固定,末端自由,积分型性能指标的泛函 极值问题。
. . .
. .
.
. . . . . . . .
. . . . . . . .
. . . . . . .
. .
. .
. .
. .
. .
.
课后习题解答
最优控制理论与系统
December 28, 2014
2 / 46
概念及定理
0
解:本题为末端时刻自由,初态和末态两端固定、积分型性能泛函的最 优控制问题。令哈密顿函数为: H = 1 + u2 + λ(−x + u), 由协态方程 ˙ (t) = − ∂ H = λ(t) ⇒ λ(t) = c1 et λ ∂x
. . . . . .
. . . .
. . . . . . . .
. . .
. .
.
. . . . . . . .
. . . . . . . .
. . . . . . .
. .
. .
. .
. .
. .
.
课后习题解答
最优控制理论与系统
December 28, 2014
最优控制课件(第二章)-2010
其差值记为:
x(t ) x1 (t ) x2 (t )
则称
与
x (t )为自变量函数的变分。
t t1 t2 称为自变量的微分相对应
10
§2.1 变分法的基本概念
泛函的变分
当自变量函数 x(t )有变分
x (t )时,连续泛函
J [ x(t )] 的增量可以表示为:
J J [ x(t ) x(t )] J [ x(t )] J [ x(t ), x(t )] [ x(t ), x(t )] x(t )
J 是 x (t ) 的线性泛函,若 其中,
x(t ) 0时,有
* x ( t ) x (t ) x(t ) * * (t ) x (t ) x (t ) x
20
§2.2 无约束条件的泛函极值问题
* (t ) x (t ),t J {L ( x * (t ) x(t ), x
t0 tf
25
最速降线问题结论:最速降曲线是一族经过原点 的一段摆线(旋轮线)
x r ( sin ) y r (1 cos )
26
§2.2 无约束条件的泛函极值问题
2.泛函的自变量函数为向量函数的情况
将上面对 x(t ) 是标量函数时所得到的公式推广到 是n维向量函数的情况,这时,性能泛函为
J J [ x(t )] J [ x* (t )] 0 或 J J [ x(t )] J [ x* (t )] 0
则泛函 J [ x(t )] 在曲线 x x* (t ) 上达到极值。 x
第二篇 最优控制理论习题答案

第二篇最优控制理论习题答案:12-1、求通过 x(0)=1,x(1)=2,并使性能指标 J (x & 21)dt 为最小的曲线 x(t)。
0 解:本题属于无约束(无状态方程约束),始端和终端均固定的泛函极值问题,可用变分法求解。
L 0, L LL x & 21,x 2x &, dt x & 2&x & 被积函数 xL d L 0, 得2&x & 0, 即&x & 0代入欧拉方程& x dt xx & c , x c t c (通解形式) 1 1 2x (0) c 1 c 11 2 由边界条件 x (1) c c 2, 解之,得c 2 11 2故最优轨线为 x (t ) t 1*1 12 2-2、求一阶系统 x &(t ) u (t ),x (0) 1,当性能指标为 J (x u 2 2)dt 取最小值时的最优控制与最优轨线。
解:本题属于有约束,始端固定;终端时间t 固定,x (t )自由,控制u 无限制的泛函极值问题, f f 可用变分法求解。
11 2u 2 ) u& 注:L (x 2 u 2)构造哈密顿函数 H (x 2 2H协态方程 x x , 即 x& ①H极值条件/控制方程u u 0, 即u ②&由系统的状态方程 x & u 及②式, x & , &x & ③由①式及③式,得 &x & x 故 ( )t c 2e tx t c 1e(t ) x (t ) c 1etc 2e t& x (0) 1 (1) 0x (t ) 代入边界条件 , , [终端横截条件 ] (c 1 c 2 1) ( c e c 2e 1 0) t f1 f得 c0.12, c 0.88 1 2**(t ) 0.12e 0.88e ttt 最优轨线 最优控制 x u (t ) 0.12e0.88e t 2-5、有一开环系统,包含放大倍数为 4的放大器和一个积分环节。
最优控制课后习题答案
最优控制课后习题答案最优控制课后习题答案最优控制是现代控制理论中的重要分支,它研究如何在给定约束条件下,使系统的性能指标达到最优。
在最优控制的学习过程中,课后习题是巩固理论知识、培养解决问题能力的重要环节。
本文将为大家提供一些最优控制课后习题的答案,希望能对大家的学习有所帮助。
1. 线性二次型最优控制问题考虑一个线性时不变系统,其状态方程和性能指标分别为:$$\begin{align*}\dot{x}(t) &= Ax(t) + Bu(t) \\J(u) &= \int_{0}^{T} (x^T(t)Qx(t) + u^T(t)Ru(t))dt\end{align*}$$其中,$x(t)$为系统的状态向量,$u(t)$为控制输入向量,$A$和$B$为系统矩阵,$Q$和$R$为正定矩阵,$T$为最优控制的时间段。
求解该问题的最优控制输入$u^*(t)$。
答案:根据最优控制的原理,最优控制输入$u^*(t)$满足以下的最优性条件:$$\begin{align*}\frac{\partial J}{\partial u}(u^*(t)) &= 2R u^*(t) + 2B^T P(t)x(t) = 0 \\\dot{P}(t) &= -PA - A^T P - Q + PBR^{-1}B^T P\end{align*}$$其中,$P(t)$为状态向量的共轭变量矩阵。
通过求解上述的代数方程和微分方程,可以得到最优控制输入$u^*(t)$和状态向量的共轭变量矩阵$P(t)$。
2. 非线性最优控制问题考虑一个非线性系统,其状态方程和性能指标分别为:$$\begin{align*}\dot{x}(t) &= f(x(t), u(t)) \\J(u) &= \int_{0}^{T} g(x(t), u(t)) dt\end{align*}$$其中,$f(x(t), u(t))$为非线性函数,$g(x(t), u(t))$为性能指标函数。
最优控制_2
u (t ) 为p维控制向量,在[t0,tf] 上分段连续
f ( x (t ), u (t ), t ) 为n维连续向量函数, 对x和t连续可微
⎡ f1(x(t),u(t),t)⎤ ⎡ f1(x1(t), x2 (t)Lxn (t),u1(t),u2 (t)Lup (t),t)⎤ ⎢ f (x(t),u(t),t)⎥ ⎢ f (x (t), x (t)Lx (t),u (t),u (t)Lu (t),t)⎥ 2 n 1 2 p ⎥ ⎥=⎢ 2 1 &(t) = f (x(t),u(t),t) = ⎢ 2 x ⎥ ⎢ ⎥ ⎢ M M ⎥ ⎢ ⎥ ⎢ f x t x t L x t u t u t L u t t ( ( ), ( ) ( ), ( ), ( ) ( ), ) f x t u t t ( ( ), ( ), ) ⎥ 2 n 1 2 p ⎣ n ⎦ ⎢ ⎣ n 1 ⎦
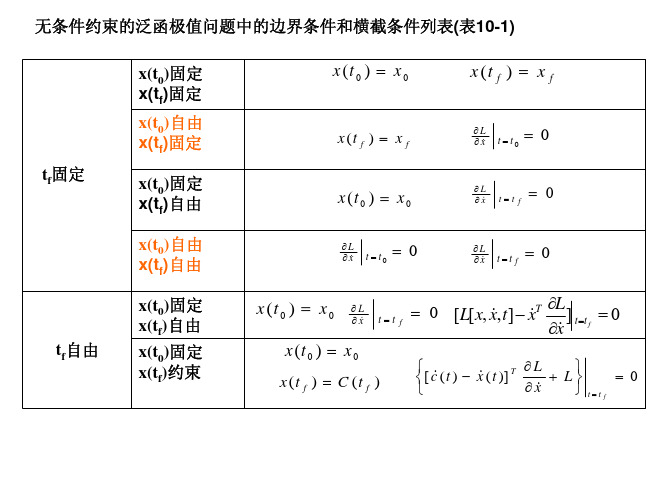
无条件约束的泛函极值问题中的边界条件和横截条件列表(表10-1) x(t0)固定 x(tf)固定 x(t0)自由 x(tf)固定 tf固定 x(t0)固定 x(tf)自由 x(t0)自由 x(tf)自由 x(t0)固定 x(tf)自由 tf自由 x(t0)固定 x(tf)约束
x (t 0 ) = x 0
∂L ∂x d − dt ∂L & ∂x
=0
T t0
T ( ∂∂L ) & x t
f
L δx(t f ) − ( ∂ &) ∂x
δx(t0 ) = 0
& , λ , t ) = g ( x, x &, t ) + λT f ( x, x &, t ) L ( x, x
λ (t ) ∈ R n 称为拉格朗日乘子
最优控制(2)

则满足末态要求的最优轨线方程可表示为
取u*= -1,也可得到满足末态要求的最优轨线方程 曲线 , 组成曲线 ,称为开关曲线,表示为
开关曲线将相平面分成两部分R+和R-
则时间最优控制为
4.2.4 最小能量控制
设线性定常系统
求满足下列不等式约束的容许控制:
使系统从初始状态x0转移到x(tf)=xf,并使性能指标
由横截条件 解出
由极小值条件
由于
可得到
t=1时,u*(t)应该为 零,即不存在最优 控制
定理 对于如下时变系统、末值型性能指标、末端自由、 控制受约束的最优控制问题
式中末端时刻固定或自由,假设同前,则对于最优解 u*,x*,tf*,必存在非零的 (t ) ,使如下必要条件成立: 1) 正则方程
则对于最优解u*,x*,tf*,必存在非零的 (t ),使如下必要条 件成立: 1) 正则方程 其中
2) 边界条件与横截条件
3) 极小值条件
4) 沿最优轨线哈密尔顿函数变化率(tf自由时用)
例子:
解:已知
由协态方程 可得到
2 (t ) c2 , 1 (t ) c1e c2
t
其中
2) 边界条件与横截条件
3) 极小值条件
4) 沿最优轨线哈密尔顿函数变化率(tf自由时用)
于是该问题就变成了如下定常问题:
(16)
利用定常系统的结论,可知协态方程为
即 (17)
横截条件为
即 极小值条件为 (18)
将式(16)代入可得
即得结论3)。沿最优轨线哈密尔顿函数变化率
将(18)代入可得到本定理的结论4)。
极小,其中 tf 固定。
构造
定义开关向量函数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 求使得2()ln f x x x =-最小的x 值。
解:'1()20f x x x =-=
求得可能的极值点是x = "21()2f x x =--
恒小于0. 所以使得2()ln f x x x =-最小的x
2. 求使221122
()10124f X x x x x =---为极值的极值点x 。
解:12'12'1220120
1280
x x f x x f x x =--==--=由上述两个方程得出的可能极值点为[]***12,0,0T T X x x ⎡⎤==⎣⎦
二阶导数矩阵为
*"20,1212,8X f --⎡⎤=⎢⎥--⎣⎦
用塞尔维斯特判据来检验,有
200-<, 20,12det 16012,8--⎡⎤=>⎢⎥--⎣⎦
故*"X f 为负定,在[]*0,0T X =处,()f X 为极大。
3求.使222123121323()55484f X x x x x x x x x x =+++--为极值的极值点x 。
解:123'123'
213'31210480
244010840
x x x f x x x f x x x f x x x =+-==+-==--=由上述三个方程得出的可能极值点为 []****123,,0,0,0T T
X x x x ⎡⎤==⎣⎦ 二阶导数矩阵为
*"10,4,84,2,48,4,10X f -⎡⎤⎢⎥=-⎢⎥⎢⎥--⎣⎦
用塞尔维斯特判据来检验,有
100> 10,4det 04,2⎡⎤>⎢⎥⎣⎦10,4,8det 4,2,4808,4,10-⎡⎤⎢⎥-=>⎢⎥⎢⎥--⎣⎦
故*"X f 为正定,在[]*0,0,0T
X =处,()f X 为极小。
4.求使2212min ()45,f X x x =+且12()2360g X x x =+-=。
解:作拉格朗日函数
12221212(,)()()45(236)L x x f X g X x x x x λλ=+=+++-
极值的必要条件 11
22
1282010302360L x x L x x L x x λλλ
∂=+=∂∂=+=∂∂=+-=∂联立求解上面三个方程可得307λ=- 可能的极值点坐标为11514x =,297
x = 根据问题的性质可以判断极小值存在且是唯一的。
2212min ()45f X x x =+=907
5.求原点到曲线23(1)0y x --=的距离为最小。
解:设原点到曲线上任意一点(,)x y 距离的平方为22(,)f x y x y =+,作拉格朗日函数 极值的必要条件为
22323(1)0220(1)0L x x x
L y y y
L y x λλλ
∂=--=∂∂=+=∂∂=--=∂联立求解上面三个方程可得1λ=-
可能的极值点坐标为(,,)((2/3+1/3(,,)((2/3+1/31/9(,,)((2/3-1/3(42(,,)((2/3-1/31/9(42(,)((2/3+1/3(,x y x y x y x y x y x λλλλ=⨯=-⨯=⨯+=-⨯+=⨯
经验证可得此极小点为
)((2/3+1/31/9y =-⨯
2223(,)(,)(,)
(1)L x y f x y g x y x y y x λλ=+⎡⎤=++--⎣⎦
6.
求函数极值()f X =22123()1x x x --= 解:作拉格朗日函数
12322123(,,)()()[()1]L x x x f X g X x x x λλ=+=---极值的必要条件为
122221123121
1222221231221222231233322123()2()0()2()0()20
()10L x x x x x x x L x x x x x x x L x x x x x x L x x x λλλλ
---∂=+++-=∂∂=++--=∂∂=++-=∂∂=---=∂联立求解上面四个方程可得
可能的极值点坐标为123123123(,,,)(4,1/2,1/2,0)
(,,,)(4,1/2,1/2,0)(,,,)(1/2,0,0,)
x x x x x x x x x i i λλλ=-=--=-
7.在第一象限内作椭球面222
2221x y z a b c ++=的切平面,使切平面与三坐标面所围成的四面体体积最小,求切点的坐标。
解:设切点为000(,,)x y z ,则222
2221x y z a b c ++=在000(,,)x y z 处的法向量是000222222(,,)x y z a b c
0000022)()()0y z x x y y z z b c -+-+-=设切平面在三坐标轴的截距为,,l m n
00y z 0==令得:000000222()(0)(0)0x y z l x y z a b c -+-+-=解得0l x =同理可证00,m y n z == 而000111*23616v lm n lmn x y z =
==于是问题变成了16v xyz =在2222221x y z a b c
++=条件极值问题。
作拉格朗日函数222
2221(,,)(1)6x y z L x y z xyz a b c
λ=+++-极值的必要条件为
222222
22212061206120610L x yz x a L y xz y b L z xy z c
L x y z a b c λλλλ∂=+=∂∂=+=∂∂=+=∂∂=++-=∂联立求解上面四个方程可得222
222x y z a b c ==
z =
y =
x =。