伺服电机接线图
松下A6-A5伺服电机各接线端接线图

松下A6-A5伺服电机各接线端子接线图
伺服驱动器各输入输出端子名称,请参照图中所示一一对接。
一、XA的主电源电路
外部电源使用三相电时,分别接L1 L2 L3。
L1C和L1短接,L2C和L3短接。
注意一点,使用单相电时100v 200v时,连接L1和L1C,L3和L2C.。
L2不连接。
请根据上图进行接线,注意线色
二、
XB 电机连接端子电路
1.对应的电机引出线颜色连接电机输出端子(U V W)
2.外置再生电阻器(B1 B2 B3),B2和B3之间需要连接短路线(C型D型),A型B型不需要短路线。
3.地线端子要接地,一个地线端子要接电机,另外一个地线端子要接地线。
三.
X1端子:连接上位机电脑(mini USB)
X2端子:通信连接器RS485 RS232.
X3端子:是安全端子1和2 不连接,3和4安全输入1. 5和6安全输入2 ,关闭发往电源模块的驱动信号,切断电机电流,7和8是EDM输出,监视由于安全功能故障而进行的监视器输出。
X3端子:safe安全模块
X4端子:并行I/o连接端子X5 端子:外部光栅尺连接。
X6端子:编码器的连接。
X7监视器的输出。
伺服电机原点,正负极限符号
伺服电机原点,正负极限符号摘要:一、伺服电机原点概述二、伺服电机原点接线方法三、伺服电机正负限位接线图四、如何实现伺服电机回原点五、注意事项正文:伺服电机作为一种高精度的执行元件,广泛应用于工业自动化领域。
伺服电机原点是指电机在未接收到控制信号时的位置,通常是电机停止位置。
在实际应用中,正确设置伺服电机原点具有重要意义。
本文将详细介绍伺服电机原点、伺服电机原点接线方法以及如何实现伺服电机回原点等内容。
一、伺服电机原点概述伺服电机原点通常由编码器信号或霍尔传感器信号检测。
在PLC或上位机程序中,通过解析编码器或霍尔传感器的信号,可以判断电机当前是否处于原点位置。
正确设置伺服电机原点,有助于提高系统的稳定性和可靠性。
二、伺服电机原点接线方法1.将编码器或霍尔传感器与伺服电机驱动器相连。
编码器或霍尔传感器一般有两个输出端,分别连接到驱动器的输入端。
2.连接电源线。
根据电机功率和电压选择合适电源线,确保电机正常工作。
3.接线完成后,检查电机是否能正常运行,如有异常,及时排查故障。
三、伺服电机正负限位接线图伺服电机正负限位接线图是指在电机运行过程中,设定正负方向的最大范围。
当电机运行到正负限位时,系统自动停止运行,避免损坏设备。
接线方法如下:1.确定正负限位开关的位置,通常位于电机运行路径的两端。
2.将正负限位开关的两个输出端分别连接到伺服电机驱动器的限位输入端。
3.连接电源线,确保限位开关正常工作。
四、如何实现伺服电机回原点1.通过PLC或上位机程序,设置伺服电机的原点。
通常需要将P06.31由0改为1,使二相220v驱动三相220发伺服电机(主要针对1kw以上的)。
2.编写程序,使电机运行至原点位置。
在程序中加入相应的指令,如编码器或霍尔传感器信号处理、速度控制等。
3.调试系统,确保电机能准确回原点。
在实际运行过程中,观察电机是否能准确停止在原点位置,如不能,及时调整程序或硬件设置。
五、注意事项1.接线时,务必确保电源线、编码器线、限位线等正确连接,避免短路、断路等现象。
富士 伺服接线图与初始化

FUJI伺服(SMART轻惯量)的接线图一、编码器的接线(配线采用双绞屏蔽线)驱动器侧CN2 电机侧插头P5 1 7 P5M5 2 8 M5+SIG 5 4 +SIG-SIG 6 5 -SIG外壳 3 FG二、动力线的接线驱动器侧电机侧插头U 1 1 UV 2 2 VW 3 3 W地 4 地三、相关参数设置注:设置好参数请重新上电。
四、操作说明线路连好之后即可上电,如果没有出现报警就可进行参数的设定。
上电后面板显示:PSOF1.按MODE/ESC键多次直到面板上显示:PA012.按ENT 键1秒以上,面板显示:P1.013.按ENT键1秒以上进行1号参数的设定,按∧∨键改变值的大小,想移位时按SHIFT/ENT键。
改好数值后按ENT键1秒以上,显示值闪烁,闪烁停止时表明参数值成功写入。
4. 按MODE/ESC返回。
5. 按∧键,面板显示:P1.02,重复第三步的操作设定2号参数。
6. 以同样的方法设定其它参数。
7.全部参数设完之后请务必先关掉电源,然后重新上电。
这样所改的参数才会生效,重新上电后面板上显示:0000。
注:对于4~5位参数的显示分为两部分,H表示高位,L表示低位。
例:NO.01参数值16684在参数中显示为“H16”连续按三下ENT后,显示“L684”,设定时按ENT选择位的位置;NO.02号参数也是如此,显示分别为“H00”和“L050”。
如何进行参数的初始化按MODE/ESC键多次,直到面板上显示:Fn01,再按∧或∨键直到显示:Fn07,按ENT键1秒以上,面板显示:PA.1n,按ENT键,显示GO,再按ENT 键执行参数的初始化,完成后面板显示:donE。
按MODE/ESC键退出,断电后再重新上电。
再把参数设置一遍即可。
注意:执行参数初始化,出现NG ,表示未进行参数初始化,可能是伺服使能没断,请断掉时能再进行参数初始化。
维宏系统安川伺服电机接线定义
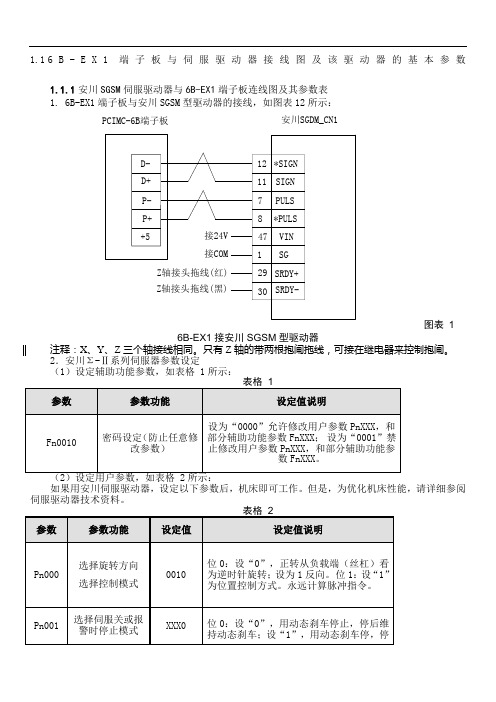
1.1 6B -E X 1端子板与伺服驱动器接线图及该驱动器的基本参数
1.1.1 安川SGSM 伺服驱动器与6B-EX1端子板连线图及其参数表 1. 6B-EX1端子板与安川SGSM 型驱动器的接线,如图表12所示:
SRDY-
Z轴接头拖线(黑)
Z轴接头拖线(红)接COM
接24V 30SRDY+29SG
1
VIN 47*PULS 8PULS
7SIGN 11*SIGN 12+5
P+P-D+D-PCIMC-6B端子板
安川SGDM_CN1
图表 1
6B-EX1接安川SGSM 型驱动器
注释:X 、Y 、Z 三个轴接线相同。
只有Z 轴的带两根抱闸拖线,可接在继电器来控制抱闸。
2.安川Σ-Ⅱ系列伺服器参数设定
(1)设定辅助功能参数,如表格 1所示:
如果用安川伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
三菱电机MR-J4全闭环控制的连接
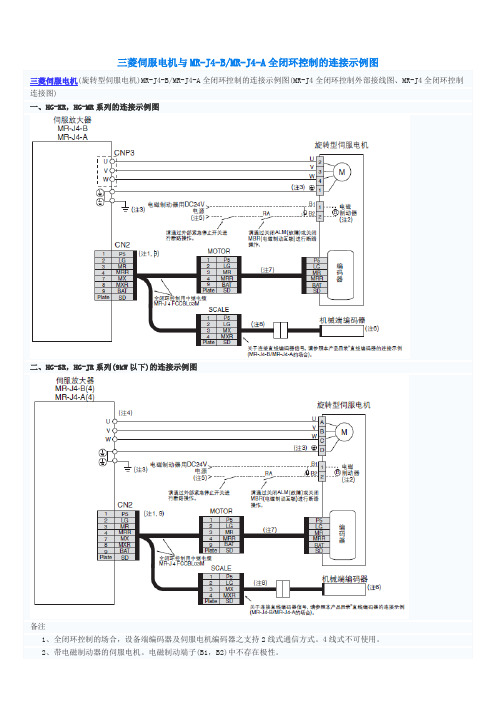
三菱伺服电机(旋转型伺服电机)MR-J4-B/MR-J4-A全闭环控制的连接示例图(MR-J4全闭环控制外部接线图、MR-J4全闭环控制连接图)
一、HG-KR,HG-MR系列的连接示例图
二、HG-SR,HG-JR系列(9kW以下)的连接示例图
5、不可将接口用DC24V电源兼用作电磁制动器用电源,请务必为其配置专用品。
6、关于直线编码器,请参照MR-J4伺服驱动&电机用户手册目录中目录的3.直线电机“直线编码器一览”。
有关使用旋转编码器的全闭环功能,请参照各伺服放大器技术资料集。7、三菱提供Fra bibliotek套的编码器电缆。
8、根据设备端编码器不同,所需编码器电缆也各不相同,请参照各技术资料集。
五、HG-RR、HG-UR系列的连接示例图
备注
1、在全闭环控制下,设备端编码器以及伺服电机编码器仅支持2线式的通信方式。无法使用4线式。
2、带电磁制动器的伺服电机。电磁制动端子(B1,B2)中不存在极性。HG-UR202B~HG-UR502B的电磁制动器接头与伺服电
机电源接头不同。此外,根据伺服电机容量的不同,引脚编号也有所不同。
有关使用旋转编码器的全闭环控制的详细信息,请参考各伺服电机的技术资料集。
6、三菱提供配套的编码器电缆。
7、根据设备端编码器的不同,所需要的编码器电缆也有所不同,请参考各技术资料集。
8、请组合使用外设动态制动(选件)。如果不连接外设动态制动,则在紧急停止时伺服电机
不会停止而是进入到自由运行状态从而导致碰撞事故。
2、带电磁制动器的伺服电机。电磁制动端子(B1,B2)中不存在极性。
3、请通过控制柜的保护接地(PE)端子,转接伺服放大器的保护接地(PE)端子进行接地。
伺服电机接线原理图

伺服电机接线原理图
以下是伺服电机接线原理图,没有标题且文中没有相同的文字:
伺服电机的接线原理图如下:
1. 从电源接线柱引出两根电源线,一根连接到电机的正极,另一根连接到电机的负极。
2. 从控制器接线柱引出信号线,连接到电机的控制端。
3. 控制器从外部接收到控制信号后,会通过信号线将信号传输到电机的控制端,从而控制电机的转动。
4. 控制器还会监测电机的转动状态,并根据需要调整输出的控制信号,以实现精准的控制。
请注意,接线图只是示意图,实际接线时应根据具体的电机和控制器型号进行接线,遵循其规定的接线方式。
混合伺服驱动器与伺服电机的接线说明
混合伺服驱动器与伺服电机的接线说明一、产品简介1.1概述SS57混合伺服驱动器是东莞市一能机电技术有限公司全新推出的SS混合伺服系列产品,采用行业最新的Cotex-M4ARM核处理器,主频高达80MHz,使得驱动器对外部响应频率最高可达500KHz,用以适配57混合伺服电机,从而使电机具有高精度,快响应,不失步,停止时绝对静止等优良特性,是当前业内同类产品中特性表现极其优异的一款产品。
1.2SS57特点◆全新Cotex-M4ARM核技术32位处理器◆主频高达80MHZ◆电机最高空载运行速度达4000转◆电机响应频率最高达500KHZ以上◆输出电流最高达7A◆细分高达25600◆输入电压最高75VDC◆双脉冲及脉冲加方向模式切换◆报警复位功能◆脉冲,方向,使能兼容5-24V输入◆丰富的报警及运行显示讯号◆失步报警输出功能1.3适配电机型号静转矩(Nm)相电流(A)电阻(Ω)相电感(mH)轴径X(mm)轴长L1(mm)机身长度L(mm)编码器分辨率SM5702A-1000AO 1.2 4.20.4 1.4819741000SM5703A-1000AO 2.1 4.20.55 2.0819941000SM5704A-1000AO 2.5 4.20.6 1.88201161000 1.4功能示意图二、电气、机械和环境指标2.1SS57电气指标说明项目SS57最小值典型值最大值单位输入电压244875VDC 驱动电流1-7.0A输入脉冲频率1-2M Hz输入脉冲宽度250-5E+8ns方向信号宽度62.5--μs输入信号电压 3.6524VDC输出信号电压--100mA输出信号电流--30vdc 2.2SS57使用环境及参数冷却方式自然冷却或强制风冷环境及参数场合尽量避免粉尘、油雾及腐蚀性气体环境温度-20℃—+40℃最高工作温度80℃湿度40—90%RH9(不能结露和有水珠)震动 5.9m/s2Max保存温度-20℃—+50℃重量约210克2.3SS57机械安装图单位:毫米(mm)图1.安装尺寸图三、SS57混合伺服驱动器接口和接线介绍3.1SS57混合伺服驱动器接口与接线示意图3.2电源输入接口CN1说明V+直流电源接入正极(电压范围:24-75VDC)V-直流电源接入负极3.3电机及编码器接口CN2说明A+闭环步进电机绕组A的正向驱动输入口A-闭环步进电机绕组A的负向驱动输入口B+闭环步进电机绕组B的正向驱动输入口B-闭环步进电机绕组B的负向驱动输入口CN3功能说明1GND闭环步进电机编码器电源0VDC输出口25V闭环步进电机编码器电源5VDC输出口3NC未使用4NC未使用5B-编码器B-输入口6B+编码器B+输入口7A-编码器A-输入口8A+编码器A+输入口3.4控制信号接口CN3功能说明1PUL-脉冲信号输入-/CW输入-2PUL+脉冲信号输入+/CW输入+3DIR-方向信号输入-/CWW输入-4DIR+方向信号输入+/CWW输入+5EN-使能信号输入-6EN+使能信号输入+7ALM-报警信号输出-8ALM+报警信号输出+9INPOS-到位信号输出-0INPOS+到位信号输出+四、电流、细分、功能拨码开关设定4.1细分设置拨码细分(步/转)SW1SW2SW3SW4200on on on on400off on on on800on off on on1600off off on on3200on on off on6400off on off on12800on off off on25600off off off on1000on on on off2000off on on off4000on off on off5000off off on off8000on on off off10000off on off off20000on off off off25000off off off off4.2初始方向选择拨码电机初始转动方向通过SW5进行设定。
伺服驱动器接线原理图
Type1
P,S
报警清除输入端子
ALRS ON:清除系统报警
ALRS OFF:保持系统报警
CN2-23
偏差计数器清零
CLE
Type1
P
位置偏差计数器清零输入端子
CLE ON:位置控制时,位置偏差计数器清零
CN2-12
模拟量输入端
Vin
Type4
S
外部模拟速度指令输入端子,单端方式,输入阻抗10千欧姆,输入范围-10V~+10V。
CN2-11
编码器B-输入
B-
与伺服电机光电编码器B-相连接
CN2-22
编码器Z+输入
Z+
Type4
与伺服电机光电编码器Z+相连接
CN2-10
编码器Z-输入
Z-
与伺服电机光电编码器Z-相连接
CN1-21
编码器U+输入
U+
Type4
与伺服电机光电编码器U+相连接
CN1-9
编码器U-输入
U-
与伺服电机光电编码器U-相连接
CN2-13
模拟量输入地
Vingnd
模拟输入的地线。
CN2-1
伺服准备好输出
SRDY
Type2
P,S
伺服准备好输出端子
SRDY ON:控制电源和主电源正常,驱动器没有报警,伺服准备好输出ON
SRDY OFF:主电源未合或驱动器有报警,伺服准备好输出OFF
CN2-15
伺服报警输出
ALM
Type2
P,S
CN1-20
编码器V+输入
V+
Type4
与伺服电机光电编码器V+相连接
CN1-8
编码器V-输入
直流无刷伺服及直流无刷电机接线图参考资料
晶貌智能电机参考资料:直流无刷、伺服电机特点:体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。
电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命。
可用于智能移动设备、高灵敏度仪器、高速运转设备等,我们电机能很好地满足其技术要求。
直流无刷电机:通过霍尔反馈控制,主要以速度控制为主对于精度要求及功能性要求不是很高的AGV小车等。
控制相对简单。
(一般的无刷电机,是根据三个霍尔产生的六组编码,比如001,101这些去判断转子旋转位置,然后控制绕组的电流换相,主要是作为一种动力输出,不需要十分精确地控制旋转角度,此时用霍尔元件就足够了,如两点之间普通搬运的小车)。
直流无刷伺服电机(配有编码器):通过编码器反馈控制,可实现速度和位置的精确控制需要准确定位及附带需求功能较多的AGV适用,目前新研发小车配套伺服趋势较明显。
(对于伺服电机而言,是要精确控制转动角度的,此时就要根据需要选择不同分辨率的编码器作为位置反馈信号,最常见的就是2500线增量编码器,相当于电机转动一圈可以发出10000个脉冲信号,所以可以达到非常精确的控制精度。
相对的,编码器的价格和霍尔不是一个数量级的,这里面当然也有性价比的问题)。
伺服电机在封闭的环里面使用。
也就是说它随时把信号传给系统,同时把系统给出的信号来修正自己的运转。
直流无刷伺服电机特点:1、转动惯量小、启动电压低、空载电流小;2、其接触式换向系统,大大提高电机转速;3、无刷伺服电机在执行伺服控制时,通过编码器可实现速度、位置、扭矩等的精确控制;4、不存在电刷磨损情况,除转速高之外,还具有寿命长、噪音低、无电磁干扰等特点。
无刷伺服电机和其他电机相比到底有什么优点:1、精度①实现了位置,速度和力矩的闭环控制;②克服了其他电机失步的问题;2、转速高速性能好,一般额定转速能达到3000~5000转;3、适应性抗过载能力强,能承受三倍于额定转矩的负载,对有瞬间负载波动和要求快速起动的场合特别适用;4、稳定①低速运行平稳,能做到低速运行时的精确控制;②适用于有高速响应要求的场合;5、及时性电机加减速的动态相应时间短,一般在几十毫秒之内;6、舒适性①发热和噪音明显降低。
伺服驱动器接线原理图说课讲解
必须与电机U、V、W端子对应连接
TB-6
V
TB-7
W
TB-8
r
控制电源
单相
控制回路电源输入端子~220V 50Hz
备注:在SD15M的TB1中不用接。
TB-9
t
反馈信号端子CN1
端子号
信号名称
端子记号
颜色
功能
记号
I/O
方式
CN1-5
CN1-6
CN1-17
CN1-18
5V电源
+5V
伺服电机光电编码器用+5V电源;
P,S
CN2-24
编码器Z相信号
ZOUT+
Type5
P,S
CN2-11
ZOUT-
P,S
CN2-2
编码器Z相集电极开路输出
CZ
Type6
P,S
1.编码器Z相信号由集电极开路输出,编码器Z相信号出现时,输出ON(输出导通),否则输出OFF(输出截止);
2.非隔离输出(非绝缘);
3.在上位机,通常Z相信号脉冲很窄,故请用高速光电耦合器
伺服报警输出端子。可以用PA27参数来改变报警输出电平高或低有效。
CN2-14
定位完成输出
COIN
Type2
P
定位完成输出端子
COIN ON:当位置偏差计数器数值在设定的定位范围时,定位完成输出ON
CN2-4
超程保护
RSTP
Type1
P,S
外接超程保护信号,信号有效时产生Err—32报警
CN2-3
输出端子
ALRS
Type1
P,S
报警清
ALRS OFF:保持系统报警
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
To &e 朴ut nfr man servo on &Qml cwTrnM off v by 胡5珥2
Err 匚口由ET5h 定
Fffhe 1 Tn pi t an r edit shock
c^nr 电匚.1 lhe protecti/e earth (FE n terminal of rhe
g=r^o ampirisrto the Drci^ecdva Barth t^E) cl :he contrcl 5* 2. Tris tarcjit a 匚・Alieis tc :h& servo rr 宙!x
GlactrcHTiaTiGtc tmlro
5: CoimectiDii dbagram
Foi the pin
en the ajupliiier side, I'^fer t« S^CZIQE 3.&.1.
■ Zucoder cable olless Lho 30m
When fabricating an encoder cable, use the MR-ECNM connector set. Referring to th.e following wiring diagram , you can fabricate an encoder cable of up w less than 30m
Note 柚e sn enccxfef cable 旧 grimed th s wre is nert 优订uiird
Servoi tnctor
HC I1FE13 3:-^73 Bl
MR-E-200A 和HC-SE-152 的接线图
总接线图参考上面的,编码器接线如下:
2 Ccimectiaii iia^rain
For ihE pm as3i?yiiner:T QH ihe imp liter =i^. i圮%r 3.31
■ Encoder cabk less than 3Ona
When 31»icMinf an encoder cable, uce the MR'ECNS <IP20 eomF Alible model) ar M&ENECNS <LP65,TP67-model) cmuwcior £M. Rtr^rring to the followup vnring dix^T必,yau. CAB fatricate an ezjGGd&r cable of up to JseB dian SO二
WR.€SCeL2rVUH WR-£SCeL5M-H MR-ESC8LWM44 MR-ESCBL20M-H
VI MN EC0 LZM-H MR-EN E 阳L2W+I
W^-ENECB L5H-I- f/R-E \EC EL1C^-H
MR-E--40A-KH003 和 KE43 的接线图 I) Connection of servo amplifier and ser\o motor DD o
L J r □ □ y 2MR J3JCBLO3M L 11 CN2 COnrlMDH
2)junaoi emnraor
/R GKCULCy H ReteD-acle:3d2W=0iD0PL
SnelKiL 5M31O-323O-O0S Connectet ,纹.54593-1D19 骐k )i 网 i M O :G : Siena azxrt v w s&sn rorr '*TrrjSKs Nol« Kwp co«n li« pins Bhcwn MlhE Etpodaffy, pin wit provided M
manfachnrB^justiwit Iftisconnect wth an>otfrer Din.flit smo ■,
i pifiUH nr< <t tWft *I H nn ikd*
这里改为10接2接8,伺服侧的编码器 9脚接地
HKMBna 1-172191-9
Ci.hh^Lt.1 Lin. 1703*0- r ■ yco sctronKS a C^bt cidirp. MTI-0DO2 ■ cn Lloctis lrius :ncs!
fliflial la>rut
VIM etian item mrar^ ada.
MR-EKC0L2DM-I-
Note. 'Afhen an encoder cable is fabricated, this wine is not required
MR-E-100A-KH003 和 KF-SE-102 的接线图
2)Cot r)e ii' n -liag 伯m
Far tue pm □DSignmert or the servo amplifier eice rater to sacticri 3.3.1.
d) Er code i cdLIt uf leis :han 3Dm
When fabricating ST encoder cab e. Lise th? F.IR-ECN5 connector set. referring tc the following wiring diagram you can fat: ncate an encoder cable ot up to less than 30m.
MR-ESG6L2M-L
M R-E SDBL XlM-L
MR-=SCBL5M-L
MR ESCQL10H L
Note. 'A'hen an encoder cable s fabneaced, this wirs is not required. MR-。