台达DVPSVLC控制台达B伺服接线及程序说明
台达DVPSVLC控制台达B伺服接线及程序说明

台达D V P S V L C控制台达B伺服接线及程序说
明
集团标准化办公室:[VV986T-J682P28-JP266L8-68PNN]
伺服位置控制说明
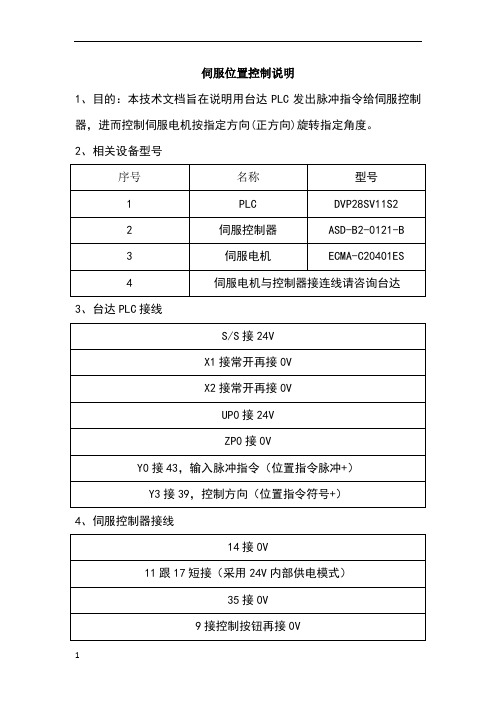
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。
(不按上述设置,只改p2-08,会报错)
2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)
4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图1 伺服接线
图2 PLC接线
图3 整体接线。
台达DVP28SV11PLC控制台达B2伺服接线及程序说明
伺服位置控制说明
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
43接Y3(正脉冲指令输入)
39接Y3(正方向指令输入)
L1C接火线,L1C跟R短接
L2C接火线,L2C跟S短接
注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。
(不按上述设置,只改p2-08,会报错)
2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)
4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图1 伺服接线
图2 PLC接线
图3 整体接线。
台达B2系列伺服简易调试流程说课讲解
台达B2系列伺服简易调试流程
台达B2系列伺服建议调试流程
一、电缆连接
1,37、39、41、43,分别的定义是:方向+、方向-、脉冲+、脉冲-。
2,如需做共阳处理。
请39、43并一起接5V+,然后37接方向、43接脉冲。
二、参数调整
1,伺服使能。
伺服使能后,电机被锁死,伺服进入待工作状态。
可以将P2-10参数设置为001,即为伺服上电自动使能;也可以将此参数更改为101,即为伺服上电后,需外部输入信号使能,即9号脚接入24GND,伺服使能。
2,参数重置开关
参数恢复出厂值开关,需在伺服使能无效时使用。
参数为P2-08,更改为10,伺服自动参数重置,无需重启。
3,参数设置
快速设置
P2-15设置为0.
P2-16设置为0.
P2-17设置为0.
电子齿轮比:
P1-44与P1-45比值为64:2为5000个脉冲电机转一圈;
P1-44与P1-45比值为32:2为10000个脉冲电机转一圈;(A2系列为128:1为10000个脉冲一圈)
基本设置:
P1-00,脉冲形式选择,位选择为2,即为脉冲+方向,即XXX2。
P1-00,信号逻辑选择,第三位选择0或1,即为方向反向,即X0XX,或X1XX。
此时电机即可正常运转!。
台达DVP-PLC控制器DVP04AD-SL模拟量输入模块测量温度程序及接线

台达DVP-PLC控制器DVP04AD-SL模拟量输⼊模块测量温度程序及接线台达DVP-PLC控制器DVP04AD-SL模拟量输⼊模块测量温度程序及接线⼀、⽬的本⽂档旨在基于台达DVP-PLC控制器DVP28SV11S2控制器, DVP04AD-SL模拟量输⼊模块,在采⽤⼩型PT100铂电阻,测量温度.⼆、相关接线说明***编程可参考1、DVP04AD-SL为左侧模块,所设置的编号从100开始,左侧第⼆个模块为101;2、对于右侧模块,编号从0开始,第⼆个为1;3、DVP04AD-SL可耐24V直流电压;4、PLC接线,1),UP0接24V,ZP0接0V,Y0-Y7输出24V;2),PNP接法:S/S接0V,X0-X7接24V;NPN接法:S/S接24V,X0-X7接0V;5、24V-1K欧-1K欧-PT100”+”-PT100”-”-0V接线图6、DVP04AD-SL接线,先接上”+””_”24V电压及零线;本测量仅使⽤1路测量,CH1, DVP04AD-SL接线⽅式为:相当于电压表,V1+接正极,V1-接负极,FG接屏蔽线;若为电流输⼊,V1+与I1+短接,再接⼊,相当于电流表1)V1+接电位器+极,V1-接电位器负极,并联在两端,相当于电压表测电压。
三、编程说明***编程可参考1、DVP04AD-SL为左侧模块,所设置的编号从100开始,左侧第⼆个模块为101;2、对于右侧模块,编号从0开始,第⼆个为1;3、编程时,需要先点击”扩充模块图标”4、5、进⼊编程界⾯6、7、控制器CR的地址需要对照使⽤说明书,其中CH1输⼊模式设定应为m2=#2,即梯形图为,设置输⼊模式8、CH1平均次数梯形图为,3200存⼊D809、测量开始控制,X1接通,M1接通,开始读取相关通道数据10、CH1输⼊信号平均值为11、CH1输⼊信号现在值为:12、浮点数转换,平均值D40转换成浮点数,放⼊D60, 现在值D50转换成浮点数,放⼊D70, D80寄存器中的3200转换成浮点数,放⼊D20.13、平均值转换成实际电压14、现在值转换成实际电压15、X2重置测量,四、PT100铂电阻温度读数本测试系统,基于PT100铂电阻传感器,在PLC程序中,只能通过D0读取铂电阻两端的电压现在值,通过D6读取铂电阻两端的电压平均值,⽐如读数为1.447V,通过换算,可得出PT100此时的电阻值为128.3199574Ω,通过””PT100分度表””可查的此时的温度约为73.5℃.。
台达PLC控制伺服说明

14应用指令简单定位设计范例14.1 台达ASDA伺服简单定位演示系统X1伺服电机Y0脉冲输出Y1正转反转/Y4脉冲清除DOP-A人机ASDA伺服驱动器WPLSoft【控制要求】z由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
z监控画面:原点回归、相对定位、绝对定位。
【元件说明】PLC软元件说明M0 原点回归开关M1 正转10圈开关M2 反转10圈开关M3 坐标400000开关M4 坐标-50000开关M10 伺服启动开关M11 伺服异常复位开关M12 暂停输出开关(PLC脉冲暂停输出)M13 伺服紧急停止开关X0 正转极限传感器X1 反转极限传感器X2 DOG(近点)信号传感器X3 来自伺服的启动准备完毕信号(对应M20)X4 来自伺服的零速度检出信号(对应M21)X5 来自伺服的原点回归完成信号(对应M22)X6 来自伺服的目标位置到达信号(对应M23)X7 来自伺服的异常报警信号(对应M24)Y0 脉冲信号输出14应用指令简单定位设计范例Y1 伺服电机旋转方向信号输出Y4 清除伺服脉冲计数寄存器信号Y6 伺服启动信号Y7 伺服异常复位信号Y10 伺服电机正方向运转禁止信号Y11 伺服电机反方向运转禁止信号Y12 伺服紧急停止信号M20 伺服启动完毕状态M21 伺服零速度状态M22 伺服原点回归完成状态M23 伺服目标位置到达状态M24 伺服异常报警状态【ASD-A伺服驱动器参数必要设置】参数设置值说明P0-02 2伺服面板显示脉冲指令脉冲计数P1-00 2外部脉冲输入形式设置为脉冲+方向P1-01 0位置控制模式(命令由外部端子输入)P2-10 101当DI1=On时,伺服启动P2-11 104当DI2=On时,清除脉冲计数寄存器P2-12 102当DI3=On时,对伺服进行异常重置P2-13 122当DI4=On时,禁止伺服电机正方向运转P2-14 123当DI5=On时,禁止伺服电机反方向运转P2-15 121当DI6=On时,伺服电机紧急停止P2-16 0无功能P2-17 0无功能P2-18 101当伺服启动准备完毕,DO1=OnP2-19 103当伺服电机转速为零时,DO2=OnP2-20 109当伺服完成原点回归后,DO3=OnP2-21 105当伺服到达目标位置后,DO4=OnP2-22 107当伺服报警时,DO5=OnÚ当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
台达B伺服接线图
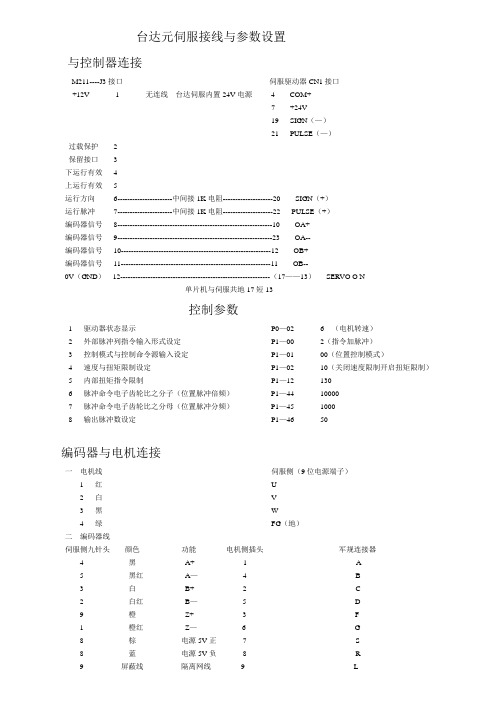
台达元伺服接线与参数设置与控制器连接M211----J3接口伺服驱动器CN1接口+12V 1 无连线台达伺服内置24V电源 4 COM+7 +24V19 SIGN(—)21 PULSE(—)过载保护 2保留接口 3下运行有效 4上运行有效 5运行方向6----------------------中间接1K电阻--------------------20 SIGN(+)运行脉冲7----------------------中间接1K电阻--------------------22 PULSE(+)编码器信号8--------------------------------------------------------------10 OA+编码器信号9--------------------------------------------------------------23 OA--编码器信号10------------------------------------------------------------12 OB+编码器信号11------------------------------------------------------------11 OB--0V(GND)12------------------------------------------------------------(17——13)SERVO O N单片机与伺服共地17短13控制参数1 驱动器状态显示P0—02 6 (电机转速)2 外部脉冲列指令输入形式设定P1—00 2(指令加脉冲)3 控制模式与控制命令源输入设定P1—01 00(位置控制模式)4 速度与扭矩限制设定P1—02 10(关闭速度限制开启扭矩限制)5 内部扭矩指令限制P1—12 1306 脉冲命令电子齿轮比之分子(位置脉冲倍频)P1—44 100007 脉冲命令电子齿轮比之分母(位置脉冲分频)P1—45 10008 输出脉冲数设定P1—46 50编码器与电机连接一电机线伺服侧(9位电源端子)1 红U2 白V3 黑W4 绿FG(地)二编码器线伺服侧九针头颜色功能电机侧插头军规连接器4 黑A+ 1 A5 黑红A— 4 B3 白B+ 2 C2 白红B— 5 D9 橙Z+ 3 F1 橙红Z— 6 G8 棕电源5V正7 S8 蓝电源5V负8 R9 屏蔽线隔离网线9 L。
台达B2伺服电机参数设定
台达B2系列伺服电机参数设定自动:P0-02 驱动器状态显示参数功能:07 电机转速(r/min)P1-01控制模式及控制指令输入源设定参数功能:02 选择为S模式(r/min)P1-38 :零速度检出准位(低于设定速度无反馈)P1-40:仿真速度指令最大回转速度如果模式为S模式,则命令来源是V-REF,GND之间的模拟量电压差,输入的电压范围为-10v-10v(应该是0-10v吧?),电压对应的转速是由P1-40调整的。
P1-55:最大速度限定值P1-40与P1-55设定的值一样。
P2-10:数字输入接脚DI1功能规划参数功能:10101:此信号接通时,伺服启动。
P2-11:数字输入脚DI2功能规划参数功能:109 09:在速度及位置模式下,次信号接通,电机速度将被限制,限制的速度指令为内部寄存器或仿真电压指令P2-12:数字输入接脚DI3功能规划参数功能:114P2-13: 数字输入接脚DI4功能规划参数功能:115P2-14: 数字输入接脚DI5功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号P2-15: 数字输入接脚DI6功能规划参数功能:0P2-16: 数字输入接脚DI7功能规划参数功能:0P2-17: 数字输入接脚DI8功能规划参数功能:000 0为设定输入点为常闭接点b。
手动设为001P2-18: 数字输出接脚DO1功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号。
P2-19:103 03:当电机运行速度低于零速度(参数P1-38)的速度设定时,此信号输出信号。
P2-20: 数字输出接脚DO3功能规划参数功能:109P2-21: 数字输出接脚DO4功能规划参数功能:105P2-22: 数字输出接脚DO5功能规划参数功能:07 07:当伺服发生警示时,此信号输出信号。
台达B2系列伺服简易调试流程
For personal use only in study and research; not for commercialuse台达B2系列伺服建议调试流程一、电缆连接1,37、39、41、43,分别的定义是:方向+、方向-、脉冲+、脉冲-。
2,如需做共阳处理。
请39、43并一起接5V+,然后37接方向、43接脉冲。
二、参数调整1,伺服使能。
伺服使能后,电机被锁死,伺服进入待工作状态。
可以将P2-10参数设置为001,即为伺服上电自动使能;也可以将此参数更改为101,即为伺服上电后,需外部输入信号使能,即9号脚接入24GND,伺服使能。
2,参数重置开关参数恢复出厂值开关,需在伺服使能无效时使用。
参数为P2-08,更改为10,伺服自动参数重置,无需重启。
3,参数设置快速设置P2-15设置为0.P2-16设置为0.P2-17设置为0.电子齿轮比:P1-44与P1-45比值为64:2为5000个脉冲电机转一圈;P1-44与P1-45比值为32:2为10000个脉冲电机转一圈;(A2系列为128:1为10000个脉冲一圈)基本设置:P1-00,脉冲形式选择,位选择为2,即为脉冲+方向,即XXX2。
P1-00,信号逻辑选择,第三位选择0或1,即为方向反向,即X0XX,或X1XX。
此时电机即可正常运转!仅供个人用于学习、研究;不得用于商业用途。
For personal use only in study and research; not for commercial use.Nur für den persönlichen für Studien, Forschung, zu kommerziellen Zwecken verwendet werden.Pour l 'étude et la recherche uniquement à des fins personnelles; pas à des fins commerciales.толькодля людей, которые используются для обучения, исследований и не должны использоваться в коммерческих целях.以下无正文仅供个人用于学习、研究;不得用于商业用途。
台达B2系列伺服简易调试流程
***
***
台达 B2 系列伺服建议调试流程
一、
电缆连接
1, 37、 39、 41、 43,分别的定义是:方向 +、方向 -、脉冲 +、脉冲 -。
2,如需做共阳处理。
请 39、 43 并一起接 5V+ ,然后 37 接方向、 43 接脉冲。
二、
参数调整
1, 伺服使能。
伺服使能后,电机被锁死,伺服进入待工作状态。
可以将
P2-10 参数设置为 001,即为
伺服上电自动使能;也可以将此参数更改为 101,即为伺服上电后,需外部输入信号使
能,即 9 号脚接入 24GND ,伺服使能。
2, 参数重置开关
参数恢复出厂值开关,需在伺服使能无效时使用。
参数为 P2-08,更改为 10,伺服自
动
参数重置,无需重启。
3, 参数设置
快速设置 P2-15 设置为 0. P2-16 设置为 0.
P2-17 设置为 0.
电子齿轮比:
P1-44 与 P1-45 比值为 64:2 为 5000 个脉冲电机转一圈;
P1-44 与 P1-45 比值为 32:2 为 10000 个脉冲电机转一圈; ( A2 系列为 128:1 为 10000 个 脉冲一圈) 基本设置:
P1-00,脉冲形式选择,位选择为 P1-00,信号逻辑选择,第三位选择
2,即为脉冲 +方向,即 XXX2 0 或 1,即为方向反向,即。
X0XX ,或
X1XX。
此时电机即可正常运转!。
台达PLC控制伺服说明
14应用指令简单定位设计范例14.1 台达ASDA伺服简单定位演示系统X1伺服电机Y0脉冲输出Y1正转反转/Y4脉冲清除DOP-A人机ASDA伺服驱动器WPLSoft【控制要求】z由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
z监控画面:原点回归、相对定位、绝对定位。
【元件说明】PLC软元件说明M0 原点回归开关M1 正转10圈开关M2 反转10圈开关M3 坐标400000开关M4 坐标-50000开关M10 伺服启动开关M11 伺服异常复位开关M12 暂停输出开关(PLC脉冲暂停输出)M13 伺服紧急停止开关X0 正转极限传感器X1 反转极限传感器X2 DOG(近点)信号传感器X3 来自伺服的启动准备完毕信号(对应M20)X4 来自伺服的零速度检出信号(对应M21)X5 来自伺服的原点回归完成信号(对应M22)X6 来自伺服的目标位置到达信号(对应M23)X7 来自伺服的异常报警信号(对应M24)Y0 脉冲信号输出14应用指令简单定位设计范例Y1 伺服电机旋转方向信号输出Y4 清除伺服脉冲计数寄存器信号Y6 伺服启动信号Y7 伺服异常复位信号Y10 伺服电机正方向运转禁止信号Y11 伺服电机反方向运转禁止信号Y12 伺服紧急停止信号M20 伺服启动完毕状态M21 伺服零速度状态M22 伺服原点回归完成状态M23 伺服目标位置到达状态M24 伺服异常报警状态【ASD-A伺服驱动器参数必要设置】参数设置值说明P0-02 2伺服面板显示脉冲指令脉冲计数P1-00 2外部脉冲输入形式设置为脉冲+方向P1-01 0位置控制模式(命令由外部端子输入)P2-10 101当DI1=On时,伺服启动P2-11 104当DI2=On时,清除脉冲计数寄存器P2-12 102当DI3=On时,对伺服进行异常重置P2-13 122当DI4=On时,禁止伺服电机正方向运转P2-14 123当DI5=On时,禁止伺服电机反方向运转P2-15 121当DI6=On时,伺服电机紧急停止P2-16 0无功能P2-17 0无功能P2-18 101当伺服启动准备完毕,DO1=OnP2-19 103当伺服电机转速为零时,DO2=OnP2-20 109当伺服完成原点回归后,DO3=OnP2-21 105当伺服到达目标位置后,DO4=OnP2-22 107当伺服报警时,DO5=OnÚ当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达D V P S V L C控制台达
B伺服接线及程序说明 The latest revision on November 22, 2020
伺服位置控制说明
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。
(不按上述设置,只改p2-08,会报错)
2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)
4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图1 伺服接线
图2 PLC接线
图3 整体接线。