台达DVSPLC控制台达B精编伺服接线及程序说明
台达DVP28SV11PLC控制台达B2伺服接线及程序说明
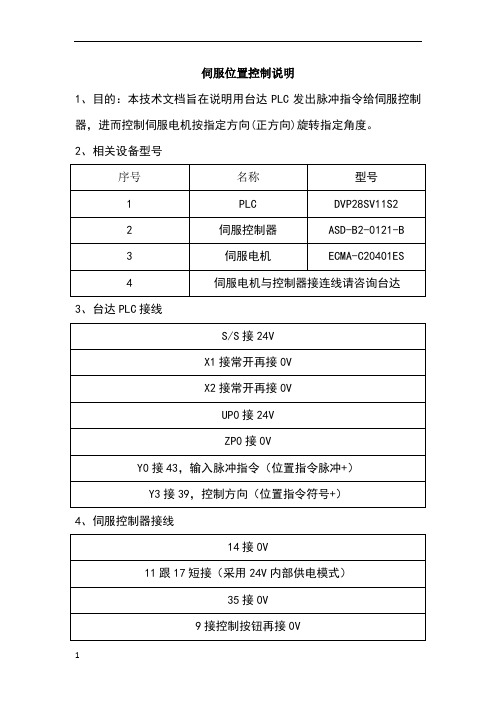
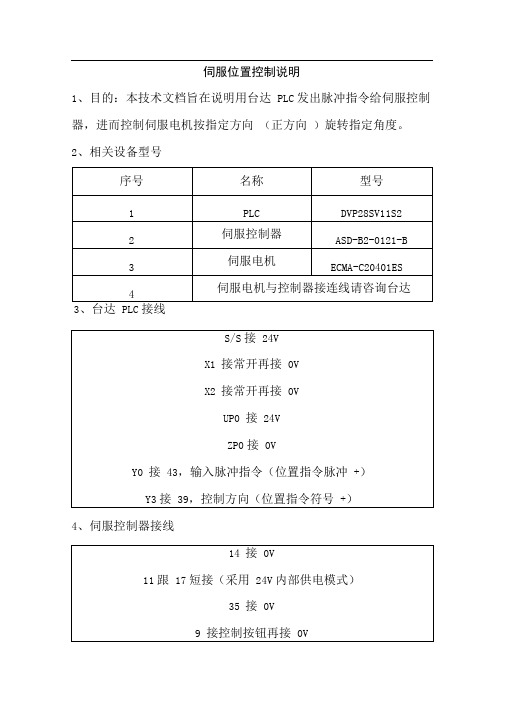
伺服位置控制说明
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
43接Y3(正脉冲指令输入)
39接Y3(正方向指令输入)
L1C接火线,L1C跟R短接
L2C接火线,L2C跟S短接
注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。
(不按上述设置,只改p2-08,会报错)
2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)
4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图1 伺服接线
图2 PLC接线
图3 整体接线。
台达DVPSVLC控制台达B伺服接线及程序说明
伺服位置控制说明
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
43接Y3(正脉冲指令输入)
39 接Y3(正方向指令输入)
L1C接火线,L1C跟R 短接L2C接火线,L2C 跟S 短接注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1. 恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15 设置为0, p2-16 设置为0, p2-17 设置为0 ,重新上电。
(不按上述设置,只改p2-08, 会报错)
2. 位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3. 设置DI1为Servo On:P2-10设置为101(默认初始值就是101)
4. 设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44 和P1-45。
5. 设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
6. P0-02 :设置为01 脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图 1 伺服接线
图 2 PLC接线
ε S。
台达b2伺服说明书
台达b2伺服说明书篇一:台达B2伺服电机参数设定台达B2系列伺服电机参数设定自动:P0-02 驱动器状态显示参数功能:07 电机转速(r/min) P1-01控制模式及控制指令输入源设定参数功能:02 选择为S模式(r/min)P1-38 :零速度检出准位(低于设定速度无反馈) P1-40:仿真速度指令最大回转速度如果模式为S模式,则命令来源是V-REF,GND之间的模拟量电压差,输入的电压范围为-10v-10v(应该是0-10v吧,),电压对应的转速是由P1-40 调整的。
P1-55:最大速度限定值P1-40与P1-55设定的值一样。
P2-10:数字输入接脚DI1功能规划参数功能:10101:此信号接通时,伺服启动。
P2-11:数字输入脚DI2功能规划参数功能:10909:在速度及位置模式下,次信号接通,电机速度将被限制,限制的速1度指令为内部寄存器或仿真电压指令P2-12:数字输入接脚DI3功能规划参数功能:114P2-13: 数字输入接脚DI4功能规划参数功能:115P2-14: 数字输入接脚DI5功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号P2-15: 数字输入接脚DI6功能规划参数功能:0P2-16: 数字输入接脚DI7功能规划参数功能:0P2-17: 数字输入接脚DI8功能规划参数功能:0000为设定输入点为常闭接点b。
手动设为001P2-18: 数字输出接脚DO1功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号。
P2-19:103 03:当电机运行速度低于零速度(参数P1-38)的速度设定时,此信号输出信号。
P2-20: 数字输出接脚DO3功能规划参数功能:109P2-21: 数字输出接脚DO4功能规划参数功能:105P2-22: 数字输出接脚DO5功能规划参数功能:07 07:当伺服发生警示时,此信号输出信号。
篇二:台达PLC控制伺服ASDA说明台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
台达b2伺服说明书
台达b2伺服说明书篇一:台达B2伺服电机参数设定台达B2系列伺服电机参数设定自动:P0-02 驱动器状态显示参数功能:07 电机转速(r/min) P1-01控制模式及控制指令输入源设定参数功能:02 选择为S模式(r/min)P1-38 :零速度检出准位(低于设定速度无反馈) P1-40:仿真速度指令最大回转速度如果模式为S模式,则命令来源是V-REF,GND之间的模拟量电压差,输入的电压范围为-10v-10v(应该是0-10v吧,),电压对应的转速是由P1-40 调整的。
P1-55:最大速度限定值P1-40与P1-55设定的值一样。
P2-10:数字输入接脚DI1功能规划参数功能:10101:此信号接通时,伺服启动。
P2-11:数字输入脚DI2功能规划参数功能:10909:在速度及位置模式下,次信号接通,电机速度将被限制,限制的速1度指令为内部寄存器或仿真电压指令P2-12:数字输入接脚DI3功能规划参数功能:114P2-13: 数字输入接脚DI4功能规划参数功能:115P2-14: 数字输入接脚DI5功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号P2-15: 数字输入接脚DI6功能规划参数功能:0P2-16: 数字输入接脚DI7功能规划参数功能:0P2-17: 数字输入接脚DI8功能规划参数功能:0000为设定输入点为常闭接点b。
手动设为001P2-18: 数字输出接脚DO1功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号。
P2-19:103 03:当电机运行速度低于零速度(参数P1-38)的速度设定时,此信号输出信号。
P2-20: 数字输出接脚DO3功能规划参数功能:109P2-21: 数字输出接脚DO4功能规划参数功能:105P2-22: 数字输出接脚DO5功能规划参数功能:07 07:当伺服发生警示时,此信号输出信号。
篇二:台达PLC控制伺服ASDA说明台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
台达B伺服接线图
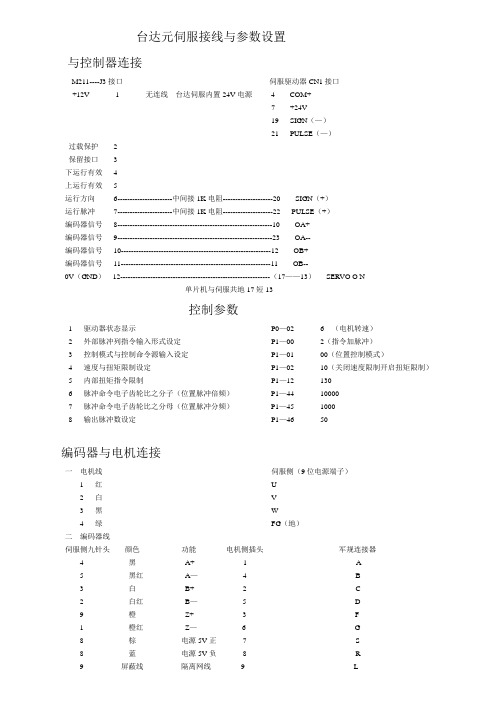
台达元伺服接线与参数设置与控制器连接M211----J3接口伺服驱动器CN1接口+12V 1 无连线台达伺服内置24V电源 4 COM+7 +24V19 SIGN(—)21 PULSE(—)过载保护 2保留接口 3下运行有效 4上运行有效 5运行方向6----------------------中间接1K电阻--------------------20 SIGN(+)运行脉冲7----------------------中间接1K电阻--------------------22 PULSE(+)编码器信号8--------------------------------------------------------------10 OA+编码器信号9--------------------------------------------------------------23 OA--编码器信号10------------------------------------------------------------12 OB+编码器信号11------------------------------------------------------------11 OB--0V(GND)12------------------------------------------------------------(17——13)SERVO O N单片机与伺服共地17短13控制参数1 驱动器状态显示P0—02 6 (电机转速)2 外部脉冲列指令输入形式设定P1—00 2(指令加脉冲)3 控制模式与控制命令源输入设定P1—01 00(位置控制模式)4 速度与扭矩限制设定P1—02 10(关闭速度限制开启扭矩限制)5 内部扭矩指令限制P1—12 1306 脉冲命令电子齿轮比之分子(位置脉冲倍频)P1—44 100007 脉冲命令电子齿轮比之分母(位置脉冲分频)P1—45 10008 输出脉冲数设定P1—46 50编码器与电机连接一电机线伺服侧(9位电源端子)1 红U2 白V3 黑W4 绿FG(地)二编码器线伺服侧九针头颜色功能电机侧插头军规连接器4 黑A+ 1 A5 黑红A— 4 B3 白B+ 2 C2 白红B— 5 D9 橙Z+ 3 F1 橙红Z— 6 G8 棕电源5V正7 S8 蓝电源5V负8 R9 屏蔽线隔离网线9 L。
台达PLC实例伺服控制实例参数设置及PLC程序
台达PLC实例伺服控制实例参数设置及PLC程序首先,让我们了解一下什么是伺服控制。
伺服控制是一种可以精确控制运动位置、速度和加速度的控制方法。
伺服控制通常用于需要高精度运动控制的应用,如工业机器人、数控机床等。
对于台达PLC的伺服控制实例,我们将使用台达的伺服驱动器ASDA 系列和PLC编程软件TVP14,这是一种常用的组合。
以下是参数设置和PLC程序的详细说明:1.参数设置:-首先,将伺服驱动器与台达PLC进行连接,并确保连接线路正确无误。
-在PLC程序中,设置好驱动器的通讯端口和通信协议,以确保PLC 能够与伺服驱动器进行通信。
-设置伺服驱动器的型号和ID号,以便PLC能够正确识别和控制伺服驱动器。
-根据应用需求,设置伺服驱动器的运动参数,如速度、加速度、位置等。
这些参数可以根据实际应用进行调整,以达到最佳控制效果。
2.PLC程序:-在PLC编程软件中,创建一个新的PLC程序,并编写相应的逻辑代码。
-首先,使用PLC的输入来控制伺服驱动器的使能信号。
当使能信号为高电平时,伺服驱动器将启动,并开始接收运动指令。
-接下来,编写代码来控制伺服驱动器的运动。
可以使用PLC的输出来控制伺服驱动器的运行方向和速度。
-使用PLC的输入来读取伺服驱动器的状态信息,如位置、速度等。
这些信息可以用于采取相应的控制策略和判断伺服运动是否达到预期目标。
-最后,使用PLC的输出来控制伺服驱动器的停止和复位功能。
当停止信号为高电平时,伺服驱动器将停止运动,并回到初始位置。
通过以上的参数设置和PLC程序,您可以实现对伺服驱动器的精确控制。
您可以根据实际应用要求,进行相应的参数调整和控制逻辑设计,以满足您的需求。
台达b2伺服说明书
台达b2伺服说明书篇一:台达B2伺服电机参数设定台达B2系列伺服电机参数设定自动:P0-02 驱动器状态显示参数功能:07 电机转速(r/min) P1-01控制模式及控制指令输入源设定参数功能:02 选择为S模式(r/min)P1-38 :零速度检出准位(低于设定速度无反馈) P1-40:仿真速度指令最大回转速度如果模式为S模式,则命令来源是V-REF,GND之间的模拟量电压差,输入的电压范围为-10v-10v(应该是0-10v吧,),电压对应的转速是由P1-40 调整的。
P1-55:最大速度限定值P1-40与P1-55设定的值一样。
P2-10:数字输入接脚DI1功能规划参数功能:10101:此信号接通时,伺服启动。
P2-11:数字输入脚DI2功能规划参数功能:10909:在速度及位置模式下,次信号接通,电机速度将被限制,限制的速1度指令为内部寄存器或仿真电压指令P2-12:数字输入接脚DI3功能规划参数功能:114P2-13: 数字输入接脚DI4功能规划参数功能:115P2-14: 数字输入接脚DI5功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号P2-15: 数字输入接脚DI6功能规划参数功能:0P2-16: 数字输入接脚DI7功能规划参数功能:0P2-17: 数字输入接脚DI8功能规划参数功能:0000为设定输入点为常闭接点b。
手动设为001P2-18: 数字输出接脚DO1功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号。
P2-19:103 03:当电机运行速度低于零速度(参数P1-38)的速度设定时,此信号输出信号。
P2-20: 数字输出接脚DO3功能规划参数功能:109P2-21: 数字输出接脚DO4功能规划参数功能:105P2-22: 数字输出接脚DO5功能规划参数功能:07 07:当伺服发生警示时,此信号输出信号。
篇二:台达PLC控制伺服ASDA说明台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
PLC接线图入门,详细掌握台达各系列伺服脉冲控制线路

PLC接线图⼊门,详细掌握台达各系列伺服脉冲控制线路
伺服脉冲⼝的接法有很多种,但是万法不变其中,⽬的都是使我们伺服驱动器的光耦能够正确的开通、关断。
我们需要做的是,根据上位机提供的信号的类型、电位、⽅向,来确定适合的接线⽅法及匹配电阻,从⽽来实现光耦可靠的开通、关断。
1、NPN接线⽅式(24V输⼊型):适⽤A,A+,AB,A2伺服。
2、NPN接线⽅式(5V输⼊型):适⽤A,A+,AB,A2伺服。
3、PNP接线⽅式(24V输⼊型):适⽤A,A+,AB,A2伺服。
4、PNP接线⽅式(5V输⼊型):适⽤A,A+,AB,A2伺服。
5、差动接线⽅式:适⽤A,A+,AB,A2伺服。
6、NPN接线⽅式(24V输⼊型):适⽤B2伺服。
B2伺服脉冲输⼊接线(集极开路)
7、NPN接线⽅式(5V输⼊型):适⽤B2伺服。
8、PNP接线⽅式(24V输⼊型):适⽤B2伺服。
9、PNP接线⽅式(5V输⼊型):适⽤B2伺服。
10、差动接线⽅式:适⽤B2伺服。
注:上图唯有1为详细画法,其余均为省略画法,由此可参考1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达D V S P L C控制台达B精编伺服接线及程序
说明
Company number【1089WT-1898YT-1W8CB-9UUT-92108】
伺服位置控制说明
1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度。
2、相关设备型号
3、台达PLC接线
4、伺服控制器接线
注:伺服电机与控制器采用专用配线连接
5、PLC程序
6、伺服控制器设置(位置模式)
1.恢复出厂设置:P2-08设置参数为10,P2-10设置为101,p2-15设置为0,p2-16设置为0,p2-17设置为0,重新上电。
(不按上述设置,只改
p2-08,会报错)
2.位置模式选择:P1-01设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
3.设置DI1为ServoOn:P2-10设置为101(默认初始值就是101)
4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
6.P0-02:设置为01脉冲指令输入脉冲数(电子齿轮比之后)
7、相关照片
图1伺服接线
图2PLC接线
图3整体接线。