台达位置与扭矩模式伺服电机文档(一类特选)
台达位置与扭矩模式伺服电机文档

台达ASD-B2伺服ECMA-C20401GS电机控制文档一.扭矩模式1.说明:此扭矩模式是用于外部控制器控制输入给伺服器的电压来实现电机扭矩大小的输出。
2.接线:将控制器控制的能输出可变电压的引脚直接连接到CN1的18引脚,将控制器的GND与伺服器CN1的19脚连接3.参数设定:P2-15,P2-16,P2-17都设定为0,消除初始状态下AL013的预警状态。
P1-01:03,将电机设定为转矩模式P1-02:01,速度限制,电机在没有负载的情况下会转很快P1-07:500,设置电机加减速的时间,减少通电与断电的时对于轴与外设的冲击P1-09=设定电机最高转速P2-12:00,将TCM0设定为0P2-13:00,将TCM1设定为0P2-12与P2-13的作用是将扭矩的命令设定为外部电压来控制。
详情见数据手册144页6.4.1P2-14:14,设定速度,当不设定此项时,电机只有力矩,没有转速P1-41:200,表示输入5V模拟电压,达到100%额定转矩P2-10:01,启动电机当此时电机不转时,重启伺服器即可。
(建议重启)要关闭电机则将P2-10设定为00,并保存,然后将开关关闭并重启即可完成电机的关闭。
二.位置模式1.说明:当前位置模式是通过外部控制器输出的PWM来控制伺服电机的位置以及速度,其中PWM频率控制电机速度,PWM的个数与P1-44与P1-45的结合控制电机的具体位置。
使用的脉冲输入为开集极NPN设备输入,电源为内部24v电源。
2.接线:上图中的白线是控制器的脉冲输出线,用于输出PWM,蓝色线是控制板的GND的连接线,用于控制器与伺服器的共地作用。
上图是伺服器CN1的接线,其中褐色线是CN1的41引脚,其中的PWM信号是控制器的PWM输出的引脚串接一个1.5K电阻通过一个NPN三极管之后连接到CN1的引脚。
其中控制器的pwm输出引脚连接NPN三极管的基极,三极管的发射极连接CN1的14脚(COM-),集电极连接到41引脚。
台达伺服电机说明书蜗轮蜗杆减速机电机减速一体机,NMRV40-20-Y..

台达伺服电机说明书蜗轮蜗杆减速机电机减速一体机,NMRV40-20-Y..欧姆龙伺服电机专用行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列枫信伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB枫信系列精密行星减速机性能参数:KB系列精密行星减速机转动惯量:配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
台达伺服参数

台达伺服参数
台达伺服的基本参数设置包括速比、编码器线数、减速比、每毫米脉冲数和螺距等。
例如,速比为的台达伺服,其P1-44分子为编码器线数X减速比=,P1-45分母为每毫米脉冲数X螺距=1000X10。
此外,对于台达伺服的速度和加速度控制,马达平滑度调节主要涉及P2-00和P2-04参数的调整。
具体来说,位置控制比例增益的初值设为35,速度
控制增益的初值设为500,然后逐渐调整这两个参数的值。
在台达伺服的操作中,还有一些重要的开关和参数,例如坐标-50000开关、M4=On开关、PLC脉冲暂停输出开关以及M13=On开关等。
这些开关在特定的操作中起到重要的作用,例如通过按下坐标-50000开关,M4=On,伺服电机执行绝对定位动作,到达绝对目标位置-50,000处后停止。
如果需要获取更多关于台达伺服参数设置的信息,建议访问台达官网或咨询专业技术人员获取。
台达B2伺服电机参数调节
台达B2伺服电机参数调节简介本文档旨在提供有关台达B2伺服电机参数调节的指导。
台达B2伺服电机是一种高性能的伺服驱动器,通过调整其参数可以实现更好的运行性能和精确度。
参数调节方法以下是台达B2伺服电机参数调节的方法:1. 位置模式参数调节:位置模式参数调节:- 位置环参数P:该参数用于控制伺服电机在位置模式下的位置准确性。
较高的P值可以提高位置响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
位置环参数P:该参数用于控制伺服电机在位置模式下的位置准确性。
较高的P值可以提高位置响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
- 位置环参数I:该参数用于控制伺服电机在位置模式下的位置稳定度。
较高的I值可以提高稳定性,但可能会导致超调现象。
较低的I值可能会导致位置稳定度不够。
根据实际情况,逐步调整该参数,以获得最佳的位置稳定度。
位置环参数I:该参数用于控制伺服电机在位置模式下的位置稳定度。
较高的I值可以提高稳定性,但可能会导致超调现象。
较低的I值可能会导致位置稳定度不够。
根据实际情况,逐步调整该参数,以获得最佳的位置稳定度。
2. 速度模式参数调节:速度模式参数调节:- 速度环参数P:该参数用于控制伺服电机在速度模式下的速度准确性。
较高的P值可以提高速度响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
速度环参数P:该参数用于控制伺服电机在速度模式下的速度准确性。
较高的P值可以提高速度响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
- 速度环参数I:该参数用于控制伺服电机在速度模式下的速度稳定度。
台达伺服基本参数设置

台达伺服基本参数设置台达伺服系统是一种采用伺服制动器及其控制方式,使电机运行具有闭环反馈调整运动控制系统,可广泛应用于机床、冲压机、包装机、印刷机械、纺织机械和自动化设备等领域。
以下是台达伺服系统的一些基本参数设置。
首先,设置伺服系统的使能信号。
伺服使能信号通常是通过外部的开关或PLC控制,当使能信号为高电平时,伺服系统处于工作状态,可以接收控制信号,当使能信号为低电平时,伺服系统处于停止状态。
其次,设置伺服系统的反馈方式。
台达伺服系统有多种反馈方式可选择,包括光电编码器、绝对值编码器和Hall传感器等。
通过将反馈装置安装在伺服电机上,可以实时检测电机的位置和速度,从而实现精确的位置控制。
然后,设置伺服系统的运行模式。
台达伺服系统有多种运行模式可选择,包括位置模式、速度模式和力矩模式等。
在位置模式下,伺服系统可以根据设定的位置信号驱动电机进行定位控制;在速度模式下,伺服系统可以根据设定的速度信号控制电机的运行速度;在力矩模式下,伺服系统可以根据设定的力矩信号控制电机输出的力矩大小。
接下来,设置伺服系统的加减速时间。
加减速时间是指电机从静止状态到达设定速度或从设定速度停止所需的时间。
在台达伺服系统中,可以通过调整加减速时间的参数来控制电机的加减速过程,从而实现更加平稳的运动过程。
此外,还可以设置伺服系统的限位信号。
限位信号可以通过设置上限位和下限位来限制电机的运动范围,从而保护设备和工件的安全。
当电机达到上限位或下限位时,伺服系统会立即停止电机的运动。
最后,还可以设置伺服系统的报警功能。
伺服系统的报警功能可以检测电机的异常情况,并及时发出报警信号。
在台达伺服系统中,可以通过设置报警功能的参数来调整报警的触发条件和报警的方式,以确保系统的安全运行。
综上所述,这些是台达伺服系统的一些基本参数设置,包括伺服使能信号、反馈方式、运行模式、加减速时间、限位信号和报警功能等。
通过对这些参数进行合理的设置和调整,可以实现伺服系统的精确控制和稳定运行。
台达伺服说明书

機械與伺服電機的組合試運行
! 注意
為了避免意想不到的事故,需進行伺服電機的無負載試運行,分開連軸器及皮帶 等,使伺服電機處於單獨的狀態,在伺服電機和機械連接後運轉,如果發生操作 錯誤,則不僅僅會造成機械的損壞,有時還可能導致人身傷害。
序言-3
目錄
第一章 產品檢查與型號說明
1-1 產品檢查….……………………………………………………………………….…… 1-1 1-2 產品型號對照……………………………………………………………………….…… 1-2
第三章 配線
3-1 週邊裝置與主電源迴路連接 ………………………………………………………….3-1 3-1-1 週邊裝置接線圖 ………………………………………………………………….3-1 3-1-2 驅動器的連接器與端子 ………………………………………………………….3-2 3-1-3 三相電源接線法 ………………………………………………………………….3-3 3-1-4 單相電源接線法 ………………………………………………………………….3-4 3-1-5 電機 U、V、W 引出線的連接頭規格 …………………………………………….3-5 3-1-6 編碼器引出線連接頭規格 ………………………………………….…………...3-6 3-1-7 線材選擇 ……….……………………………………………………………….3-7
1-2-1 伺服驅動器 ASD-A 系列 ……………………………………………………….. 1-2 1-2-2 電機系列 …………………………………………………………………………1-3 1-3 伺服驅動器與電機機種名稱對應參照表 ………………………………………………1-4 1-4 伺服驅動器各部名稱 ……………………………………………………………………1-5 1-5 伺服驅動器操作模式簡介 ………………………………………………………………1-6
台达位置与扭矩模式伺服电机文档

台达位置与扭矩模式伺服电机文档一、导言伺服电机是一种能够通过反馈机制实现精确控制运动的电机。
台达的位置与扭矩模式伺服电机是一款高性能的伺服电机,可以广泛应用于工业自动化领域。
本文档将介绍该伺服电机的基本原理、使用方法和特点。
二、基本原理位置与扭矩模式伺服电机是通过控制电流和位置反馈来实现精确控制的。
其基本原理如下:1.控制电流:伺服电机通过控制电流来控制转矩。
控制电流的大小和方向决定了电机的运动状态。
2.位置反馈:伺服电机通过位置反馈来实时监测当前位置。
位置反馈可以使用编码器等传感器来实现,以便实现精确控制。
三、使用方法1.电机参数设置:在使用之前,需要对伺服电机进行参数设置。
这些参数包括电机类型、最大电流、加速度等。
通过参数设置,可以根据具体需求来调整伺服电机的性能和响应速度。
2.控制方式选择:位置与扭矩模式伺服电机可以支持多种控制方式,如位置模式、速度模式和扭矩模式。
用户可以根据具体应用需求选择合适的控制方式。
3.控制器配置:伺服电机需要与控制器进行连接和配置。
通过控制器,用户可以实现对电机的控制和监控。
4.参数调节:在运行过程中,可能需要对伺服电机的参数进行调节,以达到更好的控制效果。
用户可以根据实际情况对参数进行调整,例如速度PID参数和位置PID参数等。
四、特点1.高性能:台达位置与扭矩模式伺服电机具有较高的响应速度和精度,能够实现精确的位置和扭矩控制。
2.多种控制方式:该伺服电机支持位置模式、速度模式和扭矩模式等多种控制方式,可以根据不同应用需求进行选择。
3.灵活性强:伺服电机具有较高的灵活性,可以适应各种不同的工业自动化应用场景。
4.简化系统结构:通过使用伺服电机,可以简化系统结构并减少设备数量,提高整体系统的可靠性和稳定性。
5.易于安装和调试:伺服电机具有较低的安装和调试难度,可以节约时间和资源。
五、应用范围1.机床行业:用于数控机床的精确控制,提高加工精度和效率。
2.机械手臂:用于工业机械手臂的精确位置和运动控制。
台达伺服参数设定(图文运用)
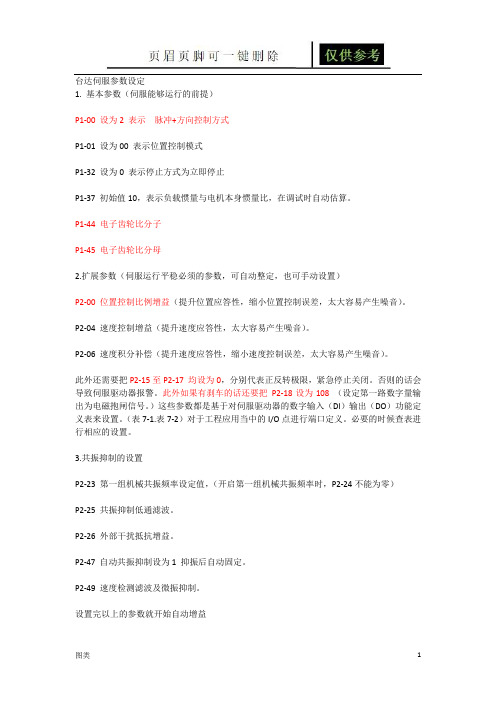
台达伺服参数设定1. 基本参数(伺服能够运行的前提)P1-00 设为2 表示脉冲+方向控制方式P1-01 设为00 表示位置控制模式P1-32 设为0 表示停止方式为立即停止P1-37 初始值10,表示负载惯量与电机本身惯量比,在调试时自动估算。
P1-44 电子齿轮比分子P1-45 电子齿轮比分母2.扩展参数(伺服运行平稳必须的参数,可自动整定,也可手动设置)P2-00 位置控制比例增益(提升位置应答性,缩小位置控制误差,太大容易产生噪音)。
P2-04 速度控制增益(提升速度应答性,太大容易产生噪音)。
P2-06 速度积分补偿(提升速度应答性,缩小速度控制误差,太大容易产生噪音)。
此外还需要把P2-15至P2-17 均设为0,分别代表正反转极限,紧急停止关闭。
否则的话会导致伺服驱动器报警。
此外如果有刹车的话还要把P2-18设为108 (设定第一路数字量输出为电磁抱闸信号。
)这些参数都是基于对伺服驱动器的数字输入(DI)输出(DO)功能定义表来设置。
(表7-1.表7-2)对于工程应用当中的I/O点进行端口定义。
必要的时候查表进行相应的设置。
3.共振抑制的设置P2-23 第一组机械共振频率设定值,(开启第一组机械共振频率时,P2-24不能为零)P2-25 共振抑制低通滤波。
P2-26 外部干扰抵抗增益。
P2-47 自动共振抑制设为1 抑振后自动固定。
P2-49 速度检测滤波及微振抑制。
设置完以上的参数就开始自动增益P2-32 设为1或2,伺服在运行过程中每半个小时估测负载惯量比至P1-37.再结合P2-31 的刚性及频宽设定,自动修改P2-00,P2-04,P2-06,P2-25,P2-26,P2-49等参数。
当P2-33为1时,P1-37惯量比估算完成,以上相应的控制参数值固定。
此外我们还可以把P2-32设为0,进行手动增益调整。
扩展资料:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达ASD-B2伺服ECMA-C20401GS电机控制文档一.扭矩模式
1.说明:此扭矩模式是用于外部控制器控制输入给伺服器的电
压来实现电机扭矩大小的输出。
2.接线:将控制器控制的能输出可变电压的引脚直接连接到
CN1的18引脚,将控制器的GND与伺服器CN1的19脚连
接
3.参数设定:
P2-15,P2-16,P2-17都设定为0,消除初始状态下AL013
的预警状态。
P1-01:03,将电机设定为转矩模式
P1-02:01,速度限制,电机在没有负载的情况下会转很快
P1-07:500,设置电机加减速的时间,减少通电与断电的时
对于轴与外设的冲击
P1-09=设定电机最高转速
P2-12:00,将TCM0设定为0
P2-13:00,将TCM1设定为0
P2-12与P2-13的作用是将扭矩的命令设定为外部电压来控
制。
详情见数据手册144页6.4.1
P2-14:14,设定速度,当不设定此项时,电机只有力矩,没有
转速
P1-41:200,表示输入5V模拟电压,达到100%额定转矩
P2-10:01,启动电机
当此时电机不转时,重启伺服器即可。
(建议重启)
要关闭电机则将P2-10设定为00,并保存,然后将开关关闭
并重启即可完成电机的关闭。
二.位置模式
1.说明:当前位置模式是通过外部控制器输出的PWM来控制
伺服电机的位置以及速度,其中PWM频率控制电机速度,
PWM的个数与P1-44与P1-45的结合控制电机的具体位置。
使用的脉冲输入为开集极NPN设备输入,电源为内部24v
电源。
2.接线:
上图中的白线是控制器的脉冲输出线,用于输出PWM,蓝色线是控制板的GND的连接线,用于控制器与伺服器的共地作用。