松下A5系列伺服电机选型手册
A5伺服驱动器参数列表
ERR
设置值
备注
11
左1右0
12
0
13
10
震动大可调大此参 数
14
250
15
3
16
2000
21
0
23
1
0
48. 49
40
24
25
38
36
65
40
40
230
2
0
JOG速度设定
200
A5伺服器报警
欠电压(控制电源) 过压(输入) 主电源欠电压
过流 过热驱动器 过载(刹车) 编码器出错或接线有误 编码器出错或断裂
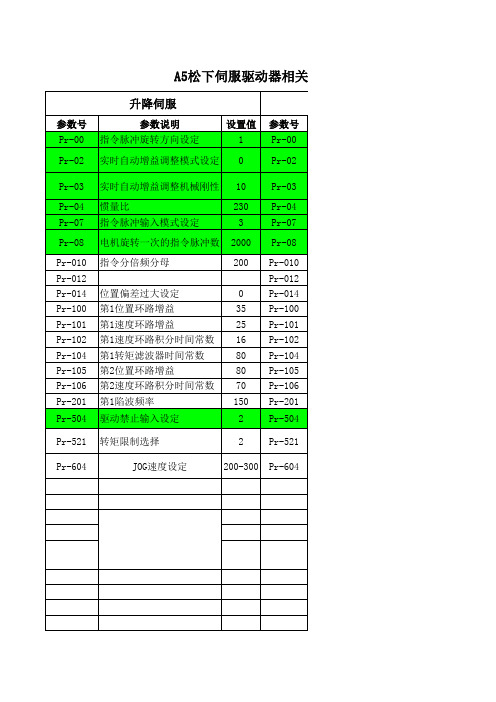
A5松下伺服驱动器相关参数设置
升降伺服
参数号
参数说明
Pr-00 指令脉冲旋转方向设定
设置值 参数号
1
Pr-00
Pr-02 实时自动增益调整模式设定 0
Pr-02
横移伺服
Pr-03 实时自动增益调整机械刚性 10
Pr-04 Pr-07
Pr-08
惯量比
230
指令脉冲输入模式设定
3
电机旋转一次的指令脉冲数 2000
Pr-201 第1陷波频率
150
Pr-504 驱动禁止输入设定
2
Pr-521 转矩限制选择
2
Pr-03
Pr-04 Pr-07
Pr-08
Pr-010 Pr-012 Pr-014 Pr-100 Pr-101 Pr-102 Pr-104 Pr-105 Pr-106 Pr-201 Pr-504
Pr-521
Pr-604
Pr-010 指令分倍频分母
200
Pr-012
松下伺服电机A5用户手册日弘忠信讲解
松下伺服电机A5用户手册日弘忠信讲解您身边的传动专家日弘忠信,成立于1997年,是一家集品牌代理、产品配套、解决方案、工程服务于一体的运营服务商。
下面简单讲解关于松下伺服电机A5用户手册的相关事项:1、松下伺服电机A5安全注意事项:警告显示的种类与含义在进行安装、配线施工、保养、检查之前,请熟读本手册。
请您在对机器的知识、安全信息以及注意事项进行确认的基础上再进行使用。
本手册中,对安全方面的注意事项等级分为"警告" 和"注意"。
警告:如果错误使用,将导致发生危险状况,有可能会导致死亡或者重伤。
注意:如果错误使用,将导致发生危险状况,从而造成受到中度伤害及轻伤或造成物品的损失。
此外,即使是记述在注意中的事项,根据发生的状况也有可能导致严重的后果。
所记述的都是非常重要的内容,请务必遵守。
2、日弘忠信松下伺服电机A5的使用注意事项:•请绝对不要用手触摸伺服放大器内部。
否则会有触电的危险。
•伺服放大器以及松下伺服电机A5的地线端子请务必接地。
否则会有触电的危险。
•配线、检查时请在切断电源5分钟以上后并确认充电LED熄灭之后再进行。
否则会有触电的危险。
•尽管是在通电状态下但充电LED仍熄灭的情况下,则伺服放大器内部的保险丝可能已熔断。
请在切断电源5分钟后进行检查。
否则会有触电的危险。
•请勿损伤电缆、施于过度的压力、负载沉重物品或挤压。
否则将造成故障、损坏和触电。
•运行过程中,请勿触摸松下伺服电机A5的旋转部位。
否则将造成受伤。
•松下伺服电机A5和伺服放大器请按照指定的组合进行使用。
否则将造成火灾、故障。
•请正确进行配线。
否则将造成故障。
•请绝对不要在溅有水的地方、腐蚀性的环境下、易燃气体的环境下和可燃物的附近进行使用。
否则将造成火灾、故障。
•请注意伺服放大器、松下伺服电机A5以及周围设备的温度会升高。
否则将烫伤。
•通电状态下及切断电源后不久,伺服放大器的散热片、再生电阻器、松下伺服电机A5等有时会呈高温,请勿触摸。
松下伺服调试参数

松下伺服调试参数 Revised by Jack on December 14,2020松下 A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制设定实时自动调整调试设定 0:无效 1:标准 3:垂直轴实时自动调整机器刚性设定调试设定 0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM中刷新保存。
指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器专用输入(高速接口)指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
第一指令脉冲分倍频分子需计算 1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量时,=10000 =螺距5mm /脉冲当量=5000 即:=10000/5000=2/1指令脉冲分倍频的分母需计算 1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
松下伺服调试参数
松下伺服调试参数 Prepared on 22 November 2020松下 A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制设定实时自动调整调试设定 0:无效 1:标准 3:垂直轴实时自动调整机器刚性设定调试设定 0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM中刷新保存。
指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器专用输入(高速接口)指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
第一指令脉冲分倍频分子需计算 1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量时,=10000 =螺距5mm /脉冲当量=5000 即:=10000/5000=2/1指令脉冲分倍频的分母需计算 1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
松下A5驱动器参数表
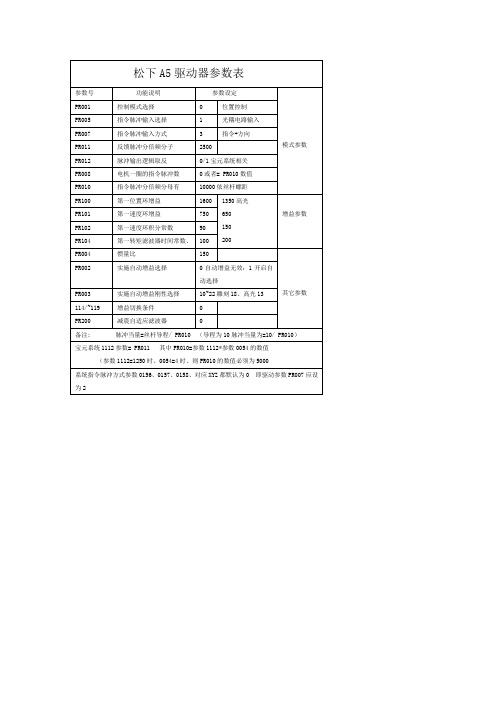
10000依丝杆螺距
PR100
第一位置环增益
1600
1350高光
650
150
200
增益参数
PR101
第一速度环增益
750
PR102
第一速度环积分常数
90
PR104
第一转矩滤波器时间常数、
100
PR004
惯量比
150
其它参数
PR002
实施自动增益选择
0自动增益无效:1开启自动选择
PR003
实施自动增益刚性选择
10~22雕刻18、高光13
114/~119
增益切换条件
0
PR200
ห้องสมุดไป่ตู้减震自适应滤波器
0
备注: 脉冲当量=丝杆导程/ PR010 (导程为10脉冲当量为=10/ PR010)
宝元系统1112参数= PR011 其中PR010=参数1112*参数0054的数值
(参数1112=1250时、0054=4时、则PR010的数值必须为5000
松下A5驱动器参数表
参数号
功能说明
参数设定
模式参数
PR001
控制模式选择
0
位置控制
PR005
指令脉冲输入选择
1
光耦电路输入
PR007
指令脉冲输入方式
3
指令+方向
PR011
反馈脉冲分倍频分子
2500
PR012
脉冲输出逻辑取反
0/1宝元系统相关
PR008
电机一圈的指令脉冲数
0或者= PR010数值
PR010
系统指令脉冲方式参数0156、0157、0158、对应XYZ都默认为0 即驱动参数PR007应设为2
A5系列伺服电机及驱动配置简要说明

一、A4 系列伺服驱动器与 A5 系列伺服驱动器部分参数对照 表一:A4 系列伺服部分参数
序 号 1 2 3 4 5 6 7 参数 参数编号 Pr01 Pr02 Pr04 Pr20 Pr21 Pr22 Pr41 参数名称 LED 初始状态 控制模式 行程限位禁止输 入无效设置 惯量比 实时自动增益设 置 实时自动增益的 机械刚性选择 指令脉冲旋转方 向设置 指令脉冲输入方 式 指令脉冲分倍频 第1分子 指令脉冲分倍频 第2分子 指令脉冲分倍频 分子倍率 指令脉冲分倍频 分母 设 置 数值 1 0 2 1678 1 1 1 显示电机转速 位置控制(相关代码 P) 当左或右限位动作,则会发生 Err38 行程限位 禁止输入信号出错报警。设置此参数值必须在 控制电源断电重启之后才能修改、写入成功。 该值自动调整得到,具体请参 AC 实时自动调整为常规模式,运行时负载惯量的 变化情况很小。 此参数值设得很大,响应越快。 指令脉冲 + 指令方向。设置此参数值必须在 控制电源断电重启之后才能修改、写入成功。 功能和含义
8
Pr42
3
Pr4B Pr48 2Pr4A
9 10 11 12
Pr48 Pr49 Pr4A Pr4B
10000 0 0 6000
每转所需指令脉冲数 编码器分辨率
现编码器分辨率为 10000(2500p/rх4) ,参数 设置如表,则,
表二:A5 系列伺服对应的参数
序 号 1 2 参数 参数号 Pr5.28 Pr0.01 Pr5.04 参数名称 LED 初始状态 控制模式设定 驱动禁止输入 设定 设置 数值 1 0 缺省 设置 1 0 显示电机转速 位置控制 设定驱动禁止输入(POT、NOT)输入的 动作。 设置为 2 时, POT/NOT 任何单方 的输入,将发生 Err38.0「驱动禁止输 入保护。 实时自动增益调整有效时,实时推断惯 量比,每 30 分钟保存在 EEPROM 中。 1 设定实时自动调整为标准模式,是基本 的模式。重视稳定性的模式。不进行可 变载荷及摩擦补偿, 也不使用增益切换。 功能和含义
松下A5软件说明
参数画面动作不正常 ..........................94 监视器画面的动作不正常 ...................94 警告画面动作不正常 ..........................94 增益调整画面的动作不正常................95 波形图画面动作不正常 .......................96 试运转画面的动作不正常 ...................97 频率特性测定画面的动作不正常.........98 引脚分配画面的动作不正常................98 问题解答画面的动作不正常................98 模拟输入调整画面的动作不正常.........99 Z相检索画面的动作不正常 .................99
况,概不负责。 5.松下株式会社拒绝对本书的内容进行不断复制的行为。 6.拒绝对本商品进行反工程化、反编译、反汇编等行为。
-5-
1.前言
PANATERM的概要
本软件需在 Windows®XP/VISTA 上运行,进行电脑和 MINAS 系列驱 动器的通信。
MINAS 系列驱动器可以和市场间销售的电脑通过 USB 电缆连接,具 有通信功能。对连接的驱动器进行参数设定或控制状态的监视等动作 可由电脑画面和鼠标、键盘来执行。使用时,请配合阅读驱动器的操 作说明书。
操作手册
AC 伺服驱动器 MINAS 系列用
安装支援软件
PANATERM Ver. 5.0
(Windows®XP/Windows®VISTA 用)
● 非常感谢本次购买松下电器 AC 伺服驱动器 MINAS 系列用安装支援 软件 PANATERM Ver.5.0。
● 请阅读此操作手册,正确使用。特别是「安全注意事项」(3~4 页)请在使用前务必阅读,确保安全使用。
松下伺服调试参数
松下伺服调试参数文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-松下 A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明Pr5.28* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)Pr0.01* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制Pr0.02 设定实时自动调整调试设定 0:无效 1:标准 3:垂直轴Pr0.03 实时自动调整机器刚性设定调试设定 0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
Pr0.04 惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM中刷新保存。
Pr0.05 指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器专用输入(高速接口)Pr0.07 指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
Pr0.09 第一指令脉冲分倍频分子需计算 1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量0.001mm时,Pr0.09=10000 Pr0.10=螺距5mm /脉冲当量0.001mm=5000 即:Pr0.09/Pr0.10=10000/5000=2/1Pr0.10 指令脉冲分倍频的分母需计算 1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
松下A5,A6伺服电机参数设置
松下A5,A6伺服电机参数设置
伺服电机有很多参数可以设置,下面我们来说说其中几个简单的参数,Pr0.08,Pr0.09,Pr0.10
这三个参数句具体含义如下图所示
特闷之间的关系看下图
从上图我们可以看到,如果我们想用10000个脉冲让电机旋转1圈,最简单的设置方法就是直接Pr0.08设置成10000.
但是很多时候我们在设计和调试过程中为了方便,需要设置成用1个脉冲去移动1mm,这样能提高程序可读性还有方便调试,这时候就可以用Pr0.09和Pr0.10去设置了。
假设我们点击齿轮直径D=100mm,减速比是1,点击编码器分辨率为8388608,这时候我们要设置参数使我们输出1个脉冲移动
1mm。
首先我们计算一下旋转1圈移动的距离=πD*减速比=314mm,我们知道的是旋转1圈的位置指令为编码器的分辨率8388608,就是说移动314mm需要8388608的位置指令,在上图我们可以看到:脉冲数*(Pr0.09/Pr0.10)=位置指令,当脉冲数=1时候
Pr0.09/Pr0.10=位置指令=8388608/314
这样就能实现1个脉冲移动1mm的需求了。
松下A5II伺服驱动器与电机组合一览表
驱动器 机箱
A型机箱
电机 小惯量 电压类型 MSMD
MSMD5AZ*** MSMD012*** MSMJ022*** MSMJ042*** MSMJ082***
型号
MADKT1505(E)
MSMJ
MSME
Байду номын сангаас
MADKT1507(E) 单相/三相200V B型机箱 MBDKT2510(E) C型机箱 MCDKT3520(E) MDDKT3530(E) MDDKT2412(E) 三相400V D型机箱 MDDKT5540(E) 单相/三相200V MDDKT3420(E) E型机箱 MEDKT7364(E) MEDKT4430(E) MFDKTA390(E) MFDKT5440(E) 三相400V 三相200V 三相400V 三相200V 三相400V 三相200V 三相400V
说明松下a5ii伺服驱动器与电机组合一览表a型机箱madkt1505e单相三相200vmadkt1507eb型机箱mbdkt2510ec型机箱mcdkt3520ed型机箱mddkt3530emddkt2412e三相400vmddkt5540e单相三相200vmddkt3420e三相400ve型机箱medkt7364e三相200vmedkt4430e三相400vf型机箱mfdkta390e三相200vmfdkt5440e三相400vmfdktb3a2e三相200vmfdkta464e三相400va5iie系列位置控制专用型不适用于绝对值规格的电机
位置控制专用型)不适用于绝对值规格的电机!
王搏 2014年5月9日
大惯量 MHME
MGME092*** MGME094***
MDME202*** MHME202*** MDME204*** MHME204*** MDME302*** MGME202*** MHME302*** MDME304*** MGME204*** MHME304*** MDME402*** MGME302*** MHME402*** MDME502*** MHME502*** MDME404*** MGME304*** MHME404*** MDME504*** MHME504*** 适用于皮带连接等低刚性用途 适用于大惯性低刚性皮带连接用途!
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
可选件
符合欧洲 EC 指令 /UL 标准 .............................................................................................106 电缆识别方法 ..................................................................................................................110 电机连接器规格 ..............................................................................................................111 编码器用中继电缆 ...........................................................................................................112 电机用中继电缆 ...............................................................................................................114 制动器用中继电缆 ...........................................................................................................117 连接器套件 .....................................................................................................................118 绝对值编码器用电池 .......................................................................................................125 安装金属件 .....................................................................................................................126 电抗器 .............................................................................................................................127 外置再生电阻器 ..............................................................................................................128 电机制动器用浪涌吸收器 ................................................................................................129 外围设备制造商一览表 ...................................................................................................130
简介 ............................................................................................................ F1~
索 引 .............................................................................................................................F25 海外销售点 ......................................................................................................................F32
.*/"4" ጆѴNJֵ̖ࠓ
1
ྱཁ̭ፀ
)JHISFTQPOTF
Ǘঋᤳ ǘ
" ̾ज़ֵ̖
ֽःᮟည L)[
ၸᜈᎵ
Ӧ࠭ͳ҃ᤴᜈᎵNjᜈNjӉᜈኍ
ֽःᮟည )[
ࠃဗᛠˉణঋᄉᤳऎֽःᮟည L)[
࿗ࠑधԦᄉКள -4* ଡᰳᤁኪᤳऎὋՎௐᦠܫ۲̅ᣀᅽ
(BJO E#
ཁᑚNjӾ҄NjᜈNjࣽNjጛ፤ኍ
Үͺࣰ໎Nj ϢൢௐᄉҮͯὀ ᎕ᆀ˿ᰳዴऎ߿ͮௐᫍὀ
᧓ၸ࿗ྱᄉζՁူܪశὋधԦѢКளᄉ ʹᑡу CJU ᎃᆉ٧nj
̾ज़"ۋ QS ὺʹᑡуὼ
" QS
ὺʹᑡуὼ
ͯᴐമᣀᅽ
ၸᜈᎵ
ͯᴐമᣀᅽ
Ӧ࠭ͳ҃ᤴᜈᎵNjᜈNjࣽNjጛ፤ኍ
ၸᜈᎵ
Ӧ࠭ͳ҃ᤴᜈᎵNjᜈNjࣽኍ
Ժࠪःᛠˉᮆጞᄉᰳবᑞ߿ͮѫᣱညૈ̽ ̾ᑡу˘ૈ ̽˝Β
nj
ૈ̽ᣤЙNj ԥᯟᣤѢᦏࠃဗ˿.QQTᄉᰳᤳࠪःnj Ӊહಕэࠪः ᄉК᫆ဖڙЮὋ ᦏԺࠃဗᰳѫᣱညᤁᣀԢᰳᤳᤁᣀnj
2
̾ज़"ۋ ὬQQT
"
.QQT
*OUFMMJHFOU
Ǘఄᑞ ǘ
驱动器通用规格 A5 系列 ( 速度、位置、转矩、全闭环型 ) .......................................................................18 A5E 系列 ( 位置控制专用型 ) ..........................................................................................20 主电路连接示例 连接器 XA、XB、XC、XD 的连接 .................................................................................22 安全功能 连接器 X3 的连接 ..........................................................................................................24 控制电路连接图 连接器 X4 的连接 ..........................................................................................................25 连接器 X5 的连接 ..........................................................................................................27 连接器 X6 的连接 ..........................................................................................................28 驱动器外形尺寸图 .............................................................................................................30
电机
电机规格 ............................................................................................................................35 通用规格 .......................................................................................................................36 电机规格说明 ..................................................................................................................104
L)[
.*/"4"
ґᯟᄉᰳֽःଌ҃ҩᑞnj᧓ၸᛠˉణঋᄉᤳऎ֖߿ֽͮःবὋ ௦ణঋᤳᄉᜈᎵnjԲܰὋֽःढᤌবͯὋࣲ࠱Үᬋͯҁణ ͯᬌऎnj
̾ज़ֵ̖
'SFRVFODZ )[
CJU ʹ ړᑡу
ၸᜈᎵ
CJU ړ ʹᑡу
&BTZ
ǗΦѽ ǘ
e߶ᜈᣃ͇ ஂNj ᔭNj ˖Nj ᭽ሗឥᝒ ᮔն ᄢᎃᆉ٧ຝऎ
$PNQBDU
ǗᣏΦ ǘ
eளࢹͺழก eளधԦᔆ eளधԦᎃᆉ٧
4BGF
Ǘஉॶ ǘ
eቿՋ߶Кಕэ eͯ٩ᮂ eቿՋ*1
目录
特点介绍 ......................................................................................................... 2 电机一览表 / 驱动器和电机组合一览表 ......................................................... 10 型号识别方法 ................................................................................................ 11 外围设备结构 ................................................................................................ 12 适用外围设备一览表 ..................................................................................... 14 型号对照表.................................................................................................... 16 驱动器