台达DVP-ES2C系列与ASDA-A2伺服电机调试方法
台达DVP-PLC控制台达B2伺服脉冲速度模式下伺服电机延时正反转

台达DVP-PLC控制台达B2伺服脉冲速度模式下伺服电机延时正反转1、目的:本技术文档旨在说明用台达PLC使用DDRVI相对定位指令发出脉冲指令给伺服控制器,实现电机正反转,再延时一定时间后重复正反转。
当正常启动PLC跟伺服系统后,按下X1,则系统以2000HZ频率开始顺时针旋转,旋转5000个脉冲后随即开始逆时针旋转5000脉冲。
再延时15s后,开始顺时针、逆时针重复动作。
旋转方向通过修改脉冲输出值的正负进行控制,5000K代表顺时针旋转方向输出5000K,-5000K代表逆时针旋转方向输出5000K。
输出装置均为Y0,M1029表示Y0输出结束的标志位。
T0表示延时时间,可以通过修改前面的数值来修改延时时间。
区段一的两个MOV句用来与触摸屏用RS485协议通讯,若不通讯,可以直接删除。
2、相关设备型号3、台达PLC接线4、伺服控制器接线注:伺服电机与控制器采用专用配线连接5、PLC程序6、伺服控制器设置(位置模式)1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。
(不按上述设置,只改p2-08,会报错)2.位置模式选择:P1-01 设置参数为00,重新上电。
设置P1-00为2,脉冲+方向模式。
(若设置P1-01为100,则方向为“-”方向,仅需改变设置P1-01)3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101)4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。
这里我们设置为160。
设置P1-44和P1-45。
5.设置增益:P2-00,P2-02。
电机抖动,这个参数设置的要小些。
6.P0-02:设置为01 脉冲指令输入脉冲数(电子齿轮比之后)7、相关照片图1 伺服接线图2 PLC接线图3 整体接线。
台达A2系列伺服电机调试步骤(2019.7.12)

第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215C DC/DC/DC)2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE一台5、博途V15设计软件6、威纶通EBproV6.0设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置1)、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17三个参数设定为0画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。
①、P1-01设定成Pt模式 00000②、P1-00设定成脉冲列+符号 00002③、P0-02 设置驱动器显示状态监视输入脉冲 01④、设定电子齿轮比P1-44(分子)和P1-45(分母)电子齿轮比需计算,计算方式如下:前提所需条件:a.产品所要达到的精度要求比如0.001mm,相当于一个脉冲想走的距离0.001mm;b.行走速度200mm/s,PLC最大发脉冲数2000000*0.001(目前伺服电机最快20m/min)c.电机编码器分辨率1280000P/Rd.齿轮分度圆直径63.66mme.减速机速比10f.m/n电机轴与负载轴的机械减速比⑤、将P1-44设为8400,P1-45设为3183⑥、重新启动伺服驱动器,即可。
台达A系列伺服电机调试步骤
台达A系列伺服电机调试步骤The Standardization Office was revised on the afternoon of December 13, 2020第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215CDC/DC/DC)2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE一台5、博途V15设计软件6、威纶通设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置1)、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17三个参数设定为0画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。
①、P1-01设定成Pt模式 00000②、P1-00设定成脉冲列+符号 00002③、P0-02 设置驱动器显示状态监视输入脉冲 01④、设定电子齿轮比P1-44(分子)和P1-45(分母)电子齿轮比需计算,计算方式如下:前提所需条件:a.产品所要达到的精度要求比如,相当于一个脉冲想走的距离;b.行走速度200mm/s,PLC最大发脉冲数2000000*(目前伺服电机最快20m/min)c.电机编码器分辨率1280000P/Rd.齿轮分度圆直径e.减速机速比10f.m/n电机轴与负载轴的机械减速比⑤、将P1-44设为8400,P1-45设为3183⑥、重新启动伺服驱动器,即可。
台达A2系列伺服电机调试步骤(2019.7.12)
第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215C DC/DC/DC)2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE一台5、博途V15设计软件6、威纶通EBproV6.0设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置1)、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17三个参数设定为0画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。
①、P1-01设定成Pt模式 00000②、P1-00设定成脉冲列+符号 00002③、P0-02 设置驱动器显示状态监视输入脉冲 01④、设定电子齿轮比P1-44(分子)和P1-45(分母)电子齿轮比需计算,计算方式如下:前提所需条件:a.产品所要达到的精度要求比如0.001mm,相当于一个脉冲想走的距离0.001mm;b.行走速度200mm/s,PLC最大发脉冲数2000000*0.001(目前伺服电机最快20m/min)c.电机编码器分辨率1280000P/Rd.齿轮分度圆直径63.66mme.减速机速比10f.m/n电机轴与负载轴的机械减速比⑤、将P1-44设为8400,P1-45设为3183⑥、重新启动伺服驱动器,即可。
台达DVP-ES2C系列与ASDA-A2伺服电机调试方法

台达绝对型编码器伺服系统的参数设置(DVP32ES200RC/TC与ASDA-A2 伺服驱动器)使用之前需要对CANopen型号的PLC进行韧体的更新。
(对应的版本为V3.43)刻录方式:1.PC 要与 ES2-C PLC 通过 IFD6601 链接。
2.点开有.exe 的文件,选择正确的 COM口。
3.鼠标点击 START burn 开始刻录,待PLC上面的EPROM指示灯闪烁红色以后,重新启动PLC,4.重启后,再次鼠标点击 START burn 开始刻录可以看到白色进度条在移动(红色进度条也是一样的,白色代表版本升级,红色代表版本降级),同时看到 Progress 有显示百分数值,到达百分之百为刻录完成。
5.刻录后检查版本刻录情况一,硬件 DI 信号配置 :DI1 → PL : 正向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱动(P2-10),用常闭接近开关,设置为23.器显示异警。
DI2 → NL : 逆向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱(P2-11),用常闭接近开关,设置为22.动器显示异警。
DI3 → EMGS : 为 B 接点,必须时常导通(ON),否则驱动器显示异警。
(P2-12),用常闭接近开关,设置为21.DI4 → ORGP : 在内部位置缓存器模式下,在搜寻原点时,此讯号接通后伺服将此点之位置当成原点。
(可以不接)二,手动设定参数 :在使用伺服专用指令之前,需要先将伺服做一些初始化设定,步骤如下 :1.将伺服 P2-08 设置为 10,回归原厂设定。
2.将伺服断电后重新上电。
3.设定伺服控制模式,将 P1-01 设置为 0001(PR 模式)具体方向可以根据实际情况更改。
4.P3-01通讯速度设置为 0403(1M)。
5.站号设定 : 依照需要的台数,分别设置每台伺服的 P3-00,请依序设定为 1、2、3 …最多可设定 8 台。
6.将伺服断电后重新上电。
台达伺服调机步骤简易说明书
台达伺服调机步骤简易说明书本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书只做一个调试流程的大概说明,具体细节部分请依实际要求调整。
一:检查确定伺服驱动器及电机是否为所需型号检查确定伺服驱动器及电机是否为所需型号;;注意安装环境注意安装环境。
(。
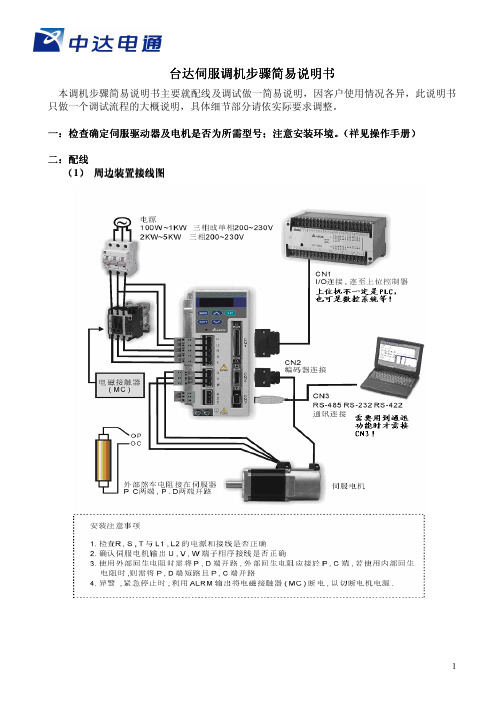
(祥见操作手册祥见操作手册祥见操作手册))二:配线(1) 周边装置接线图(2) 信号与配线请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配 线是不同的,具体请参照手册3-23至3-26页说明。
但请注意, 1.无 论是什么控制模式,伺服驱动器均需DC24V 电源,您可以让驱动器自已 供给此电源(PIN17脚VDD 与PIN11脚COM+短接);也可以外加POWER 供电(+24接伺服驱动器PIN11脚COM+,GND 接伺服的PIN45,47,49 脚COM-); 2.驱动器均需SERVO ON ,如参数没有变动,PIN9脚DI1 SON 信号需导通。
您可以根据您的需要让PIN9与PIN45等常时短接或用个开 关量来控制它的ON-OFF ; 3.如果您没有用到CW ,CCW 禁止极限和外加 急停按扭,则请把PIN 32,PIN31 ,PIN30与PIN45等COM-脚短路。
(3) 编码器接线1.編碼器引出線連接頭規格:驅動器容量 電機型號 Encoder Connector定義100w ASMT-01L250X 200w ASMT-02L250X 400w ASMT-04L250X 750WASMT-07L250XHOUSING:AMP (1-1318118-6)A1KW ASMT-10L250X ASMT-10M250X 2KW ASMT-20L250X ASMT-20M250X 3KW ASMT-30L250X ASMT-30M250X 5KWASMT-50M250X20-29 17-#16MS3106B20-29SB端子定義內容 A 端子 A1 B1 A2 B2 A3 B3 A5 B5 B6 A /A B /B Z /Z 5V GND 颜色 蓝 蓝/黑 绿 绿/黑 黄 黄/黑 红 黑 BRAID SHELDB 端子 A BCD F G S RA/AB/BZ/Z5VGND線材選擇請使用附隔離網線的多芯双绞線線材選擇請使用附隔離網線的多芯双绞線,,而隔離網線要確實與SHIELD 端相連接端相連接!2.CN2接头定义:附件附件::电子齿轮比设定步骤1. 确认机械规格确认机械规格与电子齿比设定相关的要素有:齿轮比;螺杆节距;滑轮直径等。
台达PLC控制伺服ASDA说明

台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
2:监控画面:原点回归、相对定位、绝对定位。
附:ASD-A伺服驱动器参数必要设置注意:当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
附:PLC元件说明附:PLC与伺服驱动器硬件接线图控制程序:程序说明:1:当伺服上电之后,如无警报信号,X3=On,此时,按下伺服启动开关,M10=On,伺服启动。
2:按下原点回归开关时,M0=On,伺服执行原点回归动作,当DOG信号X2由Off→On变化时,伺服以5KHZ的寸动速度回归原点,当DOG信号由On→Off变化时,伺服电机立即停止运转,回归原点完成。
3:按下正转10圈开关,M1=On,伺服电机执行相对定位动作,伺服电机正方向旋转10圈后停止运转。
4:按下正转10圈开关,M2=On,伺服电机执行相对定位动作,伺服电机反方向旋转10圈后停止运转。
5:按下坐标400000开关,M3=On,伺服电机执行绝对定位动作,到达绝对目标位置400,000处后停止。
6:按下坐标-50000开关,M4=On,伺服电机执行绝对定位动作,到达绝对目标位置-50,000处后停止。
7:若工作物碰触到正向极限传感器时,X0=On,Y10=On,伺服电机禁止正转,且伺服异常报警(M24=On)。
8:若工作物碰触到反向极限传感器时,X1=On,Y11=On,伺服电机禁止正转,且伺服异常报警(M24=On)。
9:当出现伺服异常报警后,按下伺服异常复位开关,M11=On,伺服异常报警信息解除,警报解除之后,伺服才能继续执行原点回归和定位的动作。
10:按下PLC脉冲暂停输出开关,M12=On,PLC暂停输出脉冲,脉冲输出个数会保持在寄存器内,当M12=Off时,会在原来输出个数基础上,继续输出未完成的脉冲。
DELTA ASDA-A2系列 高性能通讯型伺服驱动器 应用技术手册

如果您在使用上仍有问题,请咨询经销商或者本公司客服中心。
Revision May, 2011
i
序言ASDA-A2 系列
安全注意事项
ASDA-A2 系列为一高解析开放型(Open type)的伺服驱动器,操作时须安装于屏蔽式的控 制箱内。 本驱动器利用精密的反馈控制及结合高速运算能力的数字信号处理器 (Digital Signal PRocessor, DSP),来控制 IGBT 产生精确的电流输出,用来驱动三相永磁式同步交流伺服 电机(PMSM)以达到精准的定位。 ASDA-A2 系列可使用于工业应用场合上,且建议安装于使用手册中的配线(电)箱环境(驱 动器、线材及电机都必须安装于符合 UL 环境等级 1 的安装环境最低要求规格)。 在接收检验、安装、配线、操作、维护及检查时,应随时注意以下安全注意事项。 标志「危险」、「警告」及「禁止」代表的涵义:
主电路配线
请不要将动力线和信号线从同一管道内穿过,也不要将其绑扎在一起。配线时, 请使动力线和信号线相隔 30 厘米(11.8 英寸)以上。 对于信号线、编码器(PG)反馈线,请使用多股绞合线以及多芯绞合整体屏蔽 线。对于配线长度,信号输入线最长为 3 米(9.84 英尺) ,PG 反馈线最长为 20 米(65.62 英尺) 。 即使关闭电源,伺服驱动器内部仍然可能会滞留高电压,请暂时(10 分钟)不 要触摸电源端子。并请确认「CHARGE」指示灯熄灭以后,再进行检查作业。 请不要频繁地开关电源。如果需要连续开关电源时,请控制在一分钟一次以下。
第三章
3.1
配线
周边装置与主电源回路连接............................................................................ 3-1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达绝对型编码器伺服系统的参数设置
(DVP32ES200RC/TC与ASDA-A2 伺服驱动器)使用之前需要对CANopen型号的PLC进行韧体的更新。
(对应的版本为V3.43)
刻录方式:
1.PC 要与 ES2-C PLC 通过 IFD6601 链接。
2.点开有.exe 的文件,选择正确的 COM口。
3.鼠标点击 START burn 开始刻录,待PLC上面的EPROM指示灯闪烁红色以后,重新启动PLC,
4.重启后,再次鼠标点击 START burn 开始刻录可以看到白色进度条在移动(红色进度条也是一样的,白色代表版本升级,红色代表版本降级),同时看到 Progress 有显示百分数值,到达百分之百为刻录完成。
5.刻录后检查版本刻录情况
一,硬件 DI 信号配置 :
DI1 → PL : 正向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱动(P2-10),用常闭接近开关,设置为23.
器显示异警。
DI2 → NL : 逆向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱(P2-11),用常闭接近开关,设置为22.
动器显示异警。
DI3 → EMGS : 为 B 接点,必须时常导通(ON),否则驱动器显示异警。
(P2-12),用常闭接近开关,设置为21.
DI4 → ORGP : 在内部位置缓存器模式下,在搜寻原点时,此讯号接通后伺服将此点之位置当成原点。
(可以不接)
二,手动设定参数 :
在使用伺服专用指令之前,需要先将伺服做一些初始化设定,步骤如下 :
1.将伺服 P2-08 设置为 10,回归原厂设定。
2.将伺服断电后重新上电。
3.设定伺服控制模式,将 P1-01 设置为 0001(PR 模式)具体方向可以根据实际情况更改。
4.P3-01通讯速度设置为 0403(1M)。
5.站号设定 : 依照需要的台数,分别设置每台伺服的 P3-00,请依序设定为 1、2、3 …最多可设定 8 台。
6.将伺服断电后重新上电。
1.设置伺服驱动器站号(P3-00),伺服从1到8依次设定。
2.设置伺服电机与PLC的通讯速率(P3-01,可以设置为403)
3.设置伺服电机的运动模式(P1-01如设置为0001就是PR位置控制模式)第三位数值可以设置电机运行方向。
4.设置伺服电机的正反向禁止极限,和急停触发。
(P2-10-P2-18)
5.设置电机在绝对型编码器下的参数。
首先P2-69(绝对型编码器设定)为1,设置P2-08为271,设置P2-71(绝对位置归零,1:将目前编码器位置归零)为1,然后设置P3-12为100(只适用于P1-01=000B,即CANopen模式),设置完成后断电重启。
6.在设置伺服电的电子齿轮比(分子:P1-44,分母:P1-45,默认为128:1),K257 T17-0623上面设定的电子齿轮比为1280:1.
7.设置驱动器状态显示(P0-02为00,,就是电机回授脉冲数)
8.伺服电机回原点设置参数为:
P5-04(原点复归模式):设置复归方式为0x0021(反转方向原点复归NL做为复归原点)。
P6-00(原点复归定义):设置为0x0000。
P6-01(原点定义值):设置为0x0000。